You might also like
- 178-The IT Earthing SystemDocument31 pages178-The IT Earthing Systemgeorgel1980No ratings yet
- Frequency of Maintenance TestingDocument5 pagesFrequency of Maintenance TestingIsmael AhmedNo ratings yet
- LV Earthing SystemsDocument73 pagesLV Earthing SystemsAniela100% (1)
- TOR-WG+B1 38+After+laying+tests+on+AC+and+DC+cable+systems+with+new+technologiesDocument2 pagesTOR-WG+B1 38+After+laying+tests+on+AC+and+DC+cable+systems+with+new+technologiesWalter CataldoNo ratings yet
- Pressure Switch Internal Arc PresentationDocument27 pagesPressure Switch Internal Arc PresentationMahmoud_EldeekNo ratings yet
- Early Radio Receivers, Called Crystal Radios, Used A "Cat's Whisker" of Fine Wire Pressing On A Crystal ofDocument4 pagesEarly Radio Receivers, Called Crystal Radios, Used A "Cat's Whisker" of Fine Wire Pressing On A Crystal ofPoonam bhavsarNo ratings yet
- Type of Breakers Based On Number of PoleDocument10 pagesType of Breakers Based On Number of PoleAtse MandelaNo ratings yet
- Ferro ResonanceDocument30 pagesFerro ResonanceAlex GeorgescuNo ratings yet
- ## Etap Earth Sample PDFDocument5 pages## Etap Earth Sample PDFdcf67myNo ratings yet
- MIPSYCON 11-03-09 - Winding Design Issues Disk, Helical & Layer WindingsDocument12 pagesMIPSYCON 11-03-09 - Winding Design Issues Disk, Helical & Layer WindingsAnonymous 7kajhy0DNo ratings yet
- Preparation of Transformer SpecificationDocument54 pagesPreparation of Transformer SpecificationparvezblogNo ratings yet
- Principles of Power QualityDocument4 pagesPrinciples of Power Qualitykartheek427No ratings yet
- Rectifier - 1 Half-Wave Rectification - 2 Full-Wave Rectification - Peak Loss - The Full-Wave Bridge - RectifierDocument9 pagesRectifier - 1 Half-Wave Rectification - 2 Full-Wave Rectification - Peak Loss - The Full-Wave Bridge - Rectifierysn_usmaniNo ratings yet
- Metrosil Relays Datasheet PDFDocument4 pagesMetrosil Relays Datasheet PDFBaskaran Gangatharan100% (1)
- Electrical and Plumbing DrawingDocument6 pagesElectrical and Plumbing DrawingazniNo ratings yet
- Effects of Insulation Paper Moisture on Transformer LifespanDocument4 pagesEffects of Insulation Paper Moisture on Transformer LifespanRushikesh KulkarniNo ratings yet
- Study of Electromagnetic TransientDocument8 pagesStudy of Electromagnetic TransientEleazar Sierra EspinozaNo ratings yet
- Basics of EMI and EMCDocument16 pagesBasics of EMI and EMCAfsal Nangathan100% (1)
- Why PS Class CT Is Used For Diffenential ProtectionDocument3 pagesWhy PS Class CT Is Used For Diffenential Protectionkajale_shrikant2325No ratings yet
- Earthing SystemsDocument21 pagesEarthing SystemsGia BảoNo ratings yet
- Aac Spec 543005Document19 pagesAac Spec 543005custro_mohaleNo ratings yet
- Earthing PrimerDocument20 pagesEarthing PrimerSami DeorajNo ratings yet
- Panel Board ShortCircuit RatingsDocument2 pagesPanel Board ShortCircuit RatingsuddinnadeemNo ratings yet
- K - Factor EarthingDocument13 pagesK - Factor EarthingShrikant KajaleNo ratings yet
- Grounding Practices in Industrial Distribution Systems Avtron Loadbank, IncDocument8 pagesGrounding Practices in Industrial Distribution Systems Avtron Loadbank, Incrabahyamer8273No ratings yet
- The InductorDocument67 pagesThe Inductorleonard1971No ratings yet
- Electrical IeeeDocument8 pagesElectrical IeeeHarsha VardhanNo ratings yet
- Earth Mat Designing of SubstationDocument1 pageEarth Mat Designing of SubstationDipak BandyopadhyayNo ratings yet
- Potential TransformerDocument27 pagesPotential TransformerVijay Pandit100% (1)
- Earthing Systems in LV - Schneider 172Document30 pagesEarthing Systems in LV - Schneider 172anon_568723957No ratings yet
- When to use SP, TP, TPN and 4P circuit breakersDocument3 pagesWhen to use SP, TP, TPN and 4P circuit breakersMatthew Wong100% (1)
- Commutation ChokesDocument10 pagesCommutation Chokestudor_x27No ratings yet
- Thermal Equivalent Short Time Current CalculationDocument12 pagesThermal Equivalent Short Time Current CalculationFiko007No ratings yet
- Chapter 1 Basics of Power System Part 1 42 PDFDocument18 pagesChapter 1 Basics of Power System Part 1 42 PDFshaik jaheerNo ratings yet
- Critical 10-Step Test for New Power BreakersDocument7 pagesCritical 10-Step Test for New Power BreakersEl Comedor BenedictNo ratings yet
- System GroundingDocument26 pagesSystem GroundingEyad A. FeilatNo ratings yet
- Technical Comparison of On-Line vs. Line-Interactive UPS DesignsDocument14 pagesTechnical Comparison of On-Line vs. Line-Interactive UPS Designsdrpiratheepan4274No ratings yet
- Power Quality ManagementDocument13 pagesPower Quality ManagementAniruddh NagaNo ratings yet
- Earthing Systems1Document46 pagesEarthing Systems1Abdulaziz K AlbnyanNo ratings yet
- LT0359Document72 pagesLT0359jinyuan74No ratings yet
- What Is The Difference Between MCB, MCCB, ELCB, and RCCBDocument7 pagesWhat Is The Difference Between MCB, MCCB, ELCB, and RCCBYousif_AbdalhalimNo ratings yet
- Cahier Technique No 195: Current Transformers: Specification Errors and SolutionsDocument21 pagesCahier Technique No 195: Current Transformers: Specification Errors and SolutionsShahin AsadiFardNo ratings yet
- Ect 1956Document81 pagesEct 1956dasadNo ratings yet
- Cahiertechnique N 1 9 2: Protection of MV/LV Substation TransformersDocument37 pagesCahiertechnique N 1 9 2: Protection of MV/LV Substation TransformersonyiabNo ratings yet
- Paper - Protection of MV - LV Substation TransformerDocument37 pagesPaper - Protection of MV - LV Substation TransformerWalter Castellanos VilcaNo ratings yet
- Schneider Cachier Technique 195 Current TransformerDocument21 pagesSchneider Cachier Technique 195 Current Transformerselvamuthukumar100% (1)
- Iec 947 Ect150 PDFDocument28 pagesIec 947 Ect150 PDFGoogool YNo ratings yet
- Ferroresonance ECT190Document30 pagesFerroresonance ECT190C&P GroupNo ratings yet
- ECT158 - Calculation of Short-CircuitDocument35 pagesECT158 - Calculation of Short-Circuitkokonut1128No ratings yet
- System Earthings in LV PDFDocument29 pagesSystem Earthings in LV PDFGilberto SanchezNo ratings yet
- Ferro SchneiderDocument30 pagesFerro Schneidervoravuth srisomboonsuk100% (1)
- Diff Protection PDFDocument14 pagesDiff Protection PDFarunNo ratings yet
- Short Circuit Calculation by SchneiderDocument35 pagesShort Circuit Calculation by SchneiderDiogo Silva100% (1)
- Lazecky 2019Document5 pagesLazecky 2019VEDER MIGUEL TORRES BENITESNo ratings yet
- Schneider Short Circuit CalculationDocument36 pagesSchneider Short Circuit Calculationincobar100% (2)
- Design Criteria FOR Process #VPD-2004/01-700B-DC001: Molybdenum Plant Project JOB #25054Document26 pagesDesign Criteria FOR Process #VPD-2004/01-700B-DC001: Molybdenum Plant Project JOB #25054argari19No ratings yet
- His Grace Is Sufficient: Brad WilcoxDocument6 pagesHis Grace Is Sufficient: Brad WilcoxDavid BlakeNo ratings yet
- 120-Day Book of Mormon Reading ScheduleDocument8 pages120-Day Book of Mormon Reading Scheduleargari19No ratings yet
- WB-Mech 120 AgendaDocument3 pagesWB-Mech 120 Agendaargari19No ratings yet
- Wb-Mech 120 Ch00 TocDocument3 pagesWb-Mech 120 Ch00 Tocargari19No ratings yet
- Segunda Lectura Del Año PDFDocument3 pagesSegunda Lectura Del Año PDFargari19No ratings yet
- Mech-Intro 14.0 WS02.1 BasicsDocument23 pagesMech-Intro 14.0 WS02.1 Basicsargari19No ratings yet
- ETAP User Guide 12-5Document4,816 pagesETAP User Guide 12-5patmong77100% (17)
- Over Current Protection AnnexDocument20 pagesOver Current Protection Annexryumadmax100% (1)
- PF 14 0 Tutorial ENDocument104 pagesPF 14 0 Tutorial ENmiguelinxNo ratings yet
- Mech-Intro 14.0 WS TOCDocument2 pagesMech-Intro 14.0 WS TOCargari19No ratings yet
- Problem 4: Sizing A Transformer For Use in A Power System: ETAP Tutorial For Electric Machines ClassDocument7 pagesProblem 4: Sizing A Transformer For Use in A Power System: ETAP Tutorial For Electric Machines ClassChristopher RandallNo ratings yet
- ETAP User Guide 12-5Document4,816 pagesETAP User Guide 12-5patmong77100% (17)
- Problem Set 3 ETAP Problem Fall 2009 PDFDocument7 pagesProblem Set 3 ETAP Problem Fall 2009 PDFargari19No ratings yet
- Overcurrent Device Coordination Study - Arc Flash Hazard Analysis August 2014 FinalDocument10 pagesOvercurrent Device Coordination Study - Arc Flash Hazard Analysis August 2014 Finalargari19100% (1)
- WEG The Abcs of Synchronous Motors Usaem200syn42 Brochure EnglishDocument40 pagesWEG The Abcs of Synchronous Motors Usaem200syn42 Brochure Englishargari19100% (1)
- Chp. 7 (Part 1)Document102 pagesChp. 7 (Part 1)argari19No ratings yet
- Piping Training CourseDocument411 pagesPiping Training Coursemsaad2100% (15)
- Sag & Tension CalculationDocument6 pagesSag & Tension CalculationSandeep Guha Niyogi94% (18)
- GeneratorsDocument27 pagesGeneratorsthecodekingNo ratings yet
- Fsa HandbookDocument35 pagesFsa Handbookargari19No ratings yet
- Cadweld Welded Electrical Connections: MetricDocument56 pagesCadweld Welded Electrical Connections: MetricDonato GaloisNo ratings yet
- Short Circuit Current CalculationDocument7 pagesShort Circuit Current CalculationKalyan RanjanNo ratings yet
- 2014 NEC Codebook PDFDocument51 pages2014 NEC Codebook PDFargari1957% (7)
- WEG Specification of Electric Motors 50039409 Manual EnglishDocument68 pagesWEG Specification of Electric Motors 50039409 Manual Englishfrenchaqp100% (1)
- Section 16 Fiberglass 2015Document52 pagesSection 16 Fiberglass 2015argari19No ratings yet
- 3.sag Opgw12Document16 pages3.sag Opgw12pkshrawal1976No ratings yet
- Mini Monitor ModuleDocument2 pagesMini Monitor Moduleargari19No ratings yet
- Cadweld 2007Document123 pagesCadweld 2007zaga76No ratings yet
- Procedures - Procedure For Mechanical Run Test of Centrifugal PumpDocument2 pagesProcedures - Procedure For Mechanical Run Test of Centrifugal PumpMuneeb Imtiaz100% (1)
- CarbonitridingDocument2 pagesCarbonitridingSelva KumarNo ratings yet
- Pumping Water Using Solar Energy For IrrigationDocument34 pagesPumping Water Using Solar Energy For IrrigationBelayneh Tadesse100% (2)
- Ultraviolet RaysDocument37 pagesUltraviolet RaysJerome CatacutanNo ratings yet
- Metravi Analog Oscilloscope DsDocument6 pagesMetravi Analog Oscilloscope Dsadak avijitNo ratings yet
- Каталог вилочного погрузчика ТСМ 3 тонн полный 600 стрDocument615 pagesКаталог вилочного погрузчика ТСМ 3 тонн полный 600 стрИгорь Терещенко100% (1)
- Sustainable System Integration Model (SSIM)Document11 pagesSustainable System Integration Model (SSIM)Asian Development Bank ConferencesNo ratings yet
- AsdfsdfDocument2 pagesAsdfsdfasjdkfjskaldjf;klasdfNo ratings yet
- One - Pager - SOGEVAC SV 320 BDocument2 pagesOne - Pager - SOGEVAC SV 320 BEOLOS COMPRESSORS LTDNo ratings yet
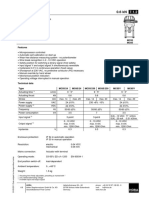
- Electric Actuators 0.6 KN .: MC55 MC65 FeaturesDocument3 pagesElectric Actuators 0.6 KN .: MC55 MC65 FeaturesArthur DiependalNo ratings yet
- Energy Usage Tracking Spreadsheet 11092022Document70 pagesEnergy Usage Tracking Spreadsheet 11092022VikasNehraNo ratings yet
- SCM-Progressive Cavity PumpDocument2 pagesSCM-Progressive Cavity PumpPhuongNo ratings yet
- KBL Split CaseDocument8 pagesKBL Split Casecarl benzNo ratings yet
- LemongrassDocument51 pagesLemongrassGisele Ferreira100% (2)
- Motorcraft 2150 CarbDocument47 pagesMotorcraft 2150 Carbalecks1100% (1)
- Microbial Fuel Cell PresentationDocument32 pagesMicrobial Fuel Cell PresentationRaghavulu S100% (1)
- Target ClientsDocument15 pagesTarget ClientsAlphatech1No ratings yet
- Einstein and Tesla Both Correct On AetherDocument5 pagesEinstein and Tesla Both Correct On AetherOctavian CuibusNo ratings yet
- 1Document15 pages1Saravanaraja KumaresanNo ratings yet
- CBU Statics and Dynamics Course OutlineDocument8 pagesCBU Statics and Dynamics Course OutlineNINEBO MWEWANo ratings yet
- 6M16 10403C Pk.s.308.en .06.22Document4 pages6M16 10403C Pk.s.308.en .06.22Sanjit VermaNo ratings yet
- SMD ChartDocument10 pagesSMD ChartGiri Dharan100% (1)
- Amino Acid MetabolismDocument25 pagesAmino Acid MetabolismParixit BhandurgeNo ratings yet
- GA-15-18-and-22-Parts List-1-2Document2 pagesGA-15-18-and-22-Parts List-1-2RE musicNo ratings yet
- Masud Rana Series - I Love You Man - Part - 1Document50 pagesMasud Rana Series - I Love You Man - Part - 1api-3704478No ratings yet
- Plastic - Waste-1 by HemantDocument9 pagesPlastic - Waste-1 by HemantVandana KatteNo ratings yet
- No Free Tickets Blockchain and The FilmDocument12 pagesNo Free Tickets Blockchain and The FilmSannan Asad ArfeenNo ratings yet
- Specification & Guide For Instrumentation Air SystemDocument4 pagesSpecification & Guide For Instrumentation Air Systemcramerps2084100% (1)
- Geankoplis 2.6-4 2.7-4Document7 pagesGeankoplis 2.6-4 2.7-4BenePicarNo ratings yet
- Ehv Ac & DC Transmission MCQ Unit - 5 - Math TradersDocument3 pagesEhv Ac & DC Transmission MCQ Unit - 5 - Math TradersRitNo ratings yet