You might also like
- 1 Manual Curso Matlab Basico Estudio PDFDocument127 pages1 Manual Curso Matlab Basico Estudio PDFCarmen Gabriela Núñez100% (1)
- Matlab y SimulinkDocument7 pagesMatlab y SimulinkOwen EncoNo ratings yet
- Manual SimulinkDocument14 pagesManual SimulinkAlis VillalobosNo ratings yet
- MétodoMVAanálisiscorcuitocortoDocument15 pagesMétodoMVAanálisiscorcuitocortoNERYNo ratings yet
- Simulink Dinámica ContinuaDocument15 pagesSimulink Dinámica ContinuaMiguel Ataurima ArellanoNo ratings yet
- Sistemas Eléctricos de Potencia en Estado EstableDocument18 pagesSistemas Eléctricos de Potencia en Estado EstableAronNo ratings yet
- Manual Basico MatlabDocument31 pagesManual Basico Matlabapi-3711287100% (5)
- Libro MatLab para IngenieríaDocument51 pagesLibro MatLab para IngenieríaMaycon Clcn Prs100% (3)
- Paper LAB 9 RouthDocument4 pagesPaper LAB 9 RouthDuvar Mauricio Duarte ParadaNo ratings yet
- Transformada de Laplace en Matlab.Document16 pagesTransformada de Laplace en Matlab.Enrique Jara AlfaroNo ratings yet
- MATLABDocument47 pagesMATLABLeonardo Gabriel Fernández GottardiniNo ratings yet
- GUI de Matlab para visualizar datosDocument36 pagesGUI de Matlab para visualizar datosMaria JoséNo ratings yet
- 61 - 3 Capi 2 PDFDocument26 pages61 - 3 Capi 2 PDFMarcelo CamiñoNo ratings yet
- Transformada de Laplace y Transformada Inversa de Laplace.Document8 pagesTransformada de Laplace y Transformada Inversa de Laplace.Bryan SalvadorNo ratings yet
- Ejercicios de Diagramas de Bloques PDFDocument5 pagesEjercicios de Diagramas de Bloques PDFmartinNo ratings yet
- Matlab para IngenierosDocument240 pagesMatlab para IngenierosYefer Solis Maza100% (5)
- Matlab para IngenierosDocument83 pagesMatlab para IngenierosJhon Silver Freire100% (2)
- S7300BASICODocument102 pagesS7300BASICORoberto Carlos Silva NeiraNo ratings yet
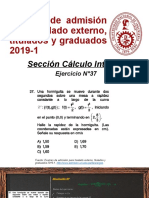
- Ej37 Ejercicio Traslado Externo UniDocument5 pagesEj37 Ejercicio Traslado Externo UniJhair Jhamidh100% (3)
- La Transformada Z y Respuesta en Frecuencia Usando Matlab PDFDocument5 pagesLa Transformada Z y Respuesta en Frecuencia Usando Matlab PDFDaniel ToaquizaNo ratings yet
- Codigo en MatlabDocument116 pagesCodigo en MatlabAbel Sarcco Usto0% (1)
- Matematicas Con ScilabDocument114 pagesMatematicas Con ScilabYairFloresNo ratings yet
- Practica 3 SimulinkDocument51 pagesPractica 3 SimulinkGeovanny PesantezNo ratings yet
- JIMENEZDocument21 pagesJIMENEZRodrigo Alonso VILLAGOMEZ BARBARANNo ratings yet
- CUADRIPOLOS Conceptos BasicosDocument3 pagesCUADRIPOLOS Conceptos BasicosDiego A. Urbina B.No ratings yet
- Ejercicios de MattlabDocument13 pagesEjercicios de MattlabCristian HbNo ratings yet
- AnalisisSenalesMATLAB 2012Document52 pagesAnalisisSenalesMATLAB 2012Sergio Andrade100% (2)
- Guía de Ejercicios Aula N 5Document5 pagesGuía de Ejercicios Aula N 5Javiier KooNo ratings yet
- Curso MATLABDocument116 pagesCurso MATLABBraulio Andres Stuardo ChandiaNo ratings yet
- Curso Programacion HP PrimeDocument12 pagesCurso Programacion HP PrimeFranck FernandezNo ratings yet
- Manual Matlab FIEE UNIDocument168 pagesManual Matlab FIEE UNIBboy010193100% (3)
- Practica Estrella TrianguloDocument7 pagesPractica Estrella TrianguloalandeakerNo ratings yet
- Apuntes SimulinkDocument38 pagesApuntes Simulinkmacquim100% (1)
- Variable Compleja y Transformada PDFDocument8 pagesVariable Compleja y Transformada PDFRicardo MariscalNo ratings yet
- Manual de MatlabDocument62 pagesManual de MatlabIgnacio LopezNo ratings yet
- Sistemas de Primer OrdenDocument11 pagesSistemas de Primer OrdenRafael Diaz Romero100% (1)
- Programacion Grafica en CDocument47 pagesProgramacion Grafica en Cjfg8721100% (3)
- MatlabDocument51 pagesMatlabAnonymous oPNNehOANo ratings yet
- Manual de SimulacionDocument133 pagesManual de Simulacioncaballo_de_fuego100% (4)
- Manual MATLABDocument81 pagesManual MATLABDavid Lopez MartinezNo ratings yet
- Metodos NumericosDocument151 pagesMetodos NumericosVictor Sumire Mamani100% (1)
- Matlab 1Document52 pagesMatlab 1William MosqueraNo ratings yet
- Introduccion Al SimulinkDocument16 pagesIntroduccion Al SimulinkZeth RamNo ratings yet
- Manual MATLAB PDFDocument33 pagesManual MATLAB PDFFredy Andres Valencia100% (1)
- Practica 1-Grupo 9EV3Document24 pagesPractica 1-Grupo 9EV3Owen CBNo ratings yet
- Laboratorio #1 - Catalan Heredia Mario renatto-VIEE-BDocument21 pagesLaboratorio #1 - Catalan Heredia Mario renatto-VIEE-ByolandaNo ratings yet
- Práctica de Laboratorio #1Document13 pagesPráctica de Laboratorio #1Jeal TaoliNo ratings yet
- ProblemasdeintrocastañedaDocument119 pagesProblemasdeintrocastañedaFRANKNo ratings yet
- Matlabmn 2Document18 pagesMatlabmn 2Kevin Joseph Martinez RoblesNo ratings yet
- Analisis NumeicoDocument11 pagesAnalisis NumeicoBrayanFernandoBermudezCasellesNo ratings yet
- Matlab Matemáticas OperativasDocument14 pagesMatlab Matemáticas OperativasFelipe MontoyaNo ratings yet
- Lecture 3Document45 pagesLecture 3SebastianNo ratings yet
- Analisis Numerico de Ecuaciones Diferenciales Usando MatlabDocument61 pagesAnalisis Numerico de Ecuaciones Diferenciales Usando MatlabSilvia MartinezNo ratings yet
- Los Metodos Numricos y La ComputadoraDocument5 pagesLos Metodos Numricos y La ComputadoraBendersonNo ratings yet
- Labotatorio 1Document17 pagesLabotatorio 1Joel RuizNo ratings yet
- Generación de señales en MatLabDocument46 pagesGeneración de señales en MatLabZy MoNo ratings yet
- Qué Es MatlabDocument51 pagesQué Es MatlabKaro DukeNo ratings yet
- Practica 05Document7 pagesPractica 05GustavoAlonsoMamaniNo ratings yet
- Generador de Graficas Con MatlabDocument8 pagesGenerador de Graficas Con MatlabCristian YomayuzaNo ratings yet
- Tarea 3 y EjerciciosDocument23 pagesTarea 3 y EjerciciosAlfredo TlapaleNo ratings yet
- Carga Térmica de Paredes Y PuertasDocument22 pagesCarga Térmica de Paredes Y PuertasLuispamaNo ratings yet
- ImusaDocument2 pagesImusaLuispamaNo ratings yet
- 246 - (Microsoft Power Point - Reporte de InversiDocument8 pages246 - (Microsoft Power Point - Reporte de InversiLuispamaNo ratings yet
- Venta de Fasc Iculos: Oficina Espa Nola de Patentes y Marcas. C/Panam A, 1 - 28036 MadridDocument13 pagesVenta de Fasc Iculos: Oficina Espa Nola de Patentes y Marcas. C/Panam A, 1 - 28036 MadridLuispamaNo ratings yet
- Recerradores 23 KVDocument6 pagesRecerradores 23 KVRicardo CordobaNo ratings yet
- Arquitectura Aplicaciones - TareaDocument11 pagesArquitectura Aplicaciones - TareaAndres G0% (1)
- Informe de La Multiplicacion BinariaDocument5 pagesInforme de La Multiplicacion BinariaNinioMaloNo ratings yet
- Modelo Relacional de CoddDocument7 pagesModelo Relacional de CoddIvan IbarraNo ratings yet
- Aportes Didácticos para El Trabajo Con La Calculadora en Los Tres Ciclos de La EgbDocument29 pagesAportes Didácticos para El Trabajo Con La Calculadora en Los Tres Ciclos de La Egbprof_elia@No ratings yet
- Actividad 2 1Document4 pagesActividad 2 1javier florezNo ratings yet
- Pedro Perez Perez: - (Ejemplo)Document2 pagesPedro Perez Perez: - (Ejemplo)Lina Paola MARROQUIN BARRAGANNo ratings yet
- Tarea de EPT - 9na E-A Primero 1ra ActividadDocument7 pagesTarea de EPT - 9na E-A Primero 1ra ActividadMary Llerena anccoNo ratings yet
- Oposiciones TemarioDocument4 pagesOposiciones TemarioGema GRNo ratings yet
- Claves de MedicinaDocument10 pagesClaves de MedicinaWavi LuNo ratings yet
- Practica Semana 4Document9 pagesPractica Semana 4Axel GTNo ratings yet
- Coordinacion de MatematicaDocument5 pagesCoordinacion de MatematicaVanessa Vallejo BureNo ratings yet
- Lab 4 - Relevadores - Guia - 01c 04Document6 pagesLab 4 - Relevadores - Guia - 01c 04Abel RodriguezNo ratings yet
- Hoja de Vida Ricardo MarinDocument3 pagesHoja de Vida Ricardo MarinRicardoMarinNo ratings yet
- Mentoria EmprendimientoDocument2 pagesMentoria EmprendimientopepeNo ratings yet
- Dossier - Ecologías DigitalesDocument92 pagesDossier - Ecologías DigitalesUniversidad de AntioquiaNo ratings yet
- Introducción A UMLetDocument13 pagesIntroducción A UMLetnickScribanoNo ratings yet
- Simulación Pyme proceso plastificadoDocument22 pagesSimulación Pyme proceso plastificadoJuan Carlos MartínezNo ratings yet
- Plantilla Exposición ParcialDocument11 pagesPlantilla Exposición ParcialJesús PachecoNo ratings yet
- Guia Metodos NumericosDocument4 pagesGuia Metodos NumericosJose Mauro Pillco QuispeNo ratings yet
- Dase de DatosDocument10 pagesDase de DatosAnonymous uVp7peHsWCNo ratings yet
- Conceptos Basicos de La Transformada de Laplace La Transformada de LaplaceDocument17 pagesConceptos Basicos de La Transformada de Laplace La Transformada de LaplaceErnesto AlonsoNo ratings yet
- 1er Parcial Desarrollo Comunitario (LU-10AM-DRU-100-02-Desarrollo Comunitario - 20203) - Microsoft TeamsDocument6 pages1er Parcial Desarrollo Comunitario (LU-10AM-DRU-100-02-Desarrollo Comunitario - 20203) - Microsoft TeamsNicole OliveroNo ratings yet
- Relación de Buenos ContribuyentesDocument3 pagesRelación de Buenos ContribuyenteskatherinNo ratings yet
- Carta de Renuncia Voluntaria Con PreavisoDocument4 pagesCarta de Renuncia Voluntaria Con PreavisoNando Rivera SoletoNo ratings yet
- CNC ManualDocument111 pagesCNC ManualJorge RomeroNo ratings yet
- Guía y manual del maximizador sonico BBE 482Document7 pagesGuía y manual del maximizador sonico BBE 482Revol JuvenilNo ratings yet
- Codigo MatlabDocument5 pagesCodigo MatlabJonatan Lozano VenturaNo ratings yet
- Practico de Redes y Programación DinámicaDocument4 pagesPractico de Redes y Programación DinámicaPilar Peffaure OllerNo ratings yet
- Investigacion Cuadro ComparativoDocument6 pagesInvestigacion Cuadro ComparativoElenna RuiizNo ratings yet