You might also like
- RG-RD Frame TD012030EN (300 DPI) 8-31-17Document16 pagesRG-RD Frame TD012030EN (300 DPI) 8-31-17Rasek ResolfNo ratings yet
- Atp CSV 20180405Document589 pagesAtp CSV 20180405Eduardo Alfredo Lalla100% (1)
- D22IT184 DAA Practical3Document24 pagesD22IT184 DAA Practical3Nazil DhalwalaNo ratings yet
- Import COMTRADE data and filter signalsDocument23 pagesImport COMTRADE data and filter signalsJIMENEZPSNo ratings yet
- SSGB Exam 3 FinalDocument5 pagesSSGB Exam 3 FinalqcsupNo ratings yet
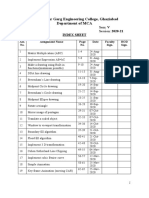
- Ajay Kumar Garg Engineering College, Ghaziabad Department of MCADocument3 pagesAjay Kumar Garg Engineering College, Ghaziabad Department of MCAUmesh MauryaNo ratings yet
- Design of Rotary-IntersectionDocument4 pagesDesign of Rotary-Intersectionanjan luitelNo ratings yet
- PowerSwing Parameter 68WDocument23 pagesPowerSwing Parameter 68WJIMENEZPSNo ratings yet
- Arithmetic Blocks Low-Power Design: 18-322 Lecture 18Document18 pagesArithmetic Blocks Low-Power Design: 18-322 Lecture 18shijint89No ratings yet
- Final Exam CMPE 650: NameDocument10 pagesFinal Exam CMPE 650: NameFritzie LuayonNo ratings yet
- C PDFDocument23 pagesC PDFTATATAHERNo ratings yet
- RTDS Laboratory - 2023Document8 pagesRTDS Laboratory - 2023Mothathego MasiaNo ratings yet
- Alp , Tech. Mayhs e - Book (1)Document79 pagesAlp , Tech. Mayhs e - Book (1)Digital WorldNo ratings yet
- DYNA INTERFACE MODULE FOR DETROIT DIESEL DDEC IIIDocument2 pagesDYNA INTERFACE MODULE FOR DETROIT DIESEL DDEC IIICpe_CarloNo ratings yet
- Statistical analysis of key chapters for electronics engineering examsDocument57 pagesStatistical analysis of key chapters for electronics engineering examsshubhankar palNo ratings yet
- Telematic SupplementDocument14 pagesTelematic SupplementStuart SainsburyNo ratings yet
- AD7730 EvalBoardDocument8 pagesAD7730 EvalBoardX'mix ĐreamerNo ratings yet
- RF IV Waveform Measurement and Engineering for Non-Linear CAD ModellingDocument38 pagesRF IV Waveform Measurement and Engineering for Non-Linear CAD ModellingPopescuNo ratings yet
- Grade Card Semester Report May 2021Document3 pagesGrade Card Semester Report May 2021PRAGYA PATIDARNo ratings yet
- Ats Schematic Diagram For Diesel Generator in Autoca - Cad Library Related ContentDocument1 pageAts Schematic Diagram For Diesel Generator in Autoca - Cad Library Related ContentShareik GriffithNo ratings yet
- K Value & Design SpeedsDocument7 pagesK Value & Design SpeedsBeljun FloresNo ratings yet
- Cisco Green Research Symposium: FPGA-based ASIC Design and VerificationDocument27 pagesCisco Green Research Symposium: FPGA-based ASIC Design and Verificationrithwikraj321No ratings yet
- Casio FX 5800 P Surveying ProgramsDocument26 pagesCasio FX 5800 P Surveying ProgramsSalem Samad81% (16)
- Tri-level DAC Design Improves Dynamic PerformanceDocument4 pagesTri-level DAC Design Improves Dynamic PerformanceNguyen Van ToanNo ratings yet
- Inegrated Lab 2Document11 pagesInegrated Lab 2Talha Mustafa JuttNo ratings yet
- CAD HardwareDocument49 pagesCAD HardwareRaghuNo ratings yet
- Tekla InteroperabilityDocument7 pagesTekla InteroperabilityershekarNo ratings yet
- basic-SAT-solving 43531231223534534Document31 pagesbasic-SAT-solving 43531231223534534anthraxwarNo ratings yet
- Interface Module - UM-D37M/DS/FU/LED/AID4/C3/R C - 2906182: Why Buy This ProductDocument4 pagesInterface Module - UM-D37M/DS/FU/LED/AID4/C3/R C - 2906182: Why Buy This ProductWin RobinNo ratings yet
- SeminarDocument29 pagesSeminarMohan UrsNo ratings yet
- GINOS ENGINEERS PTY LTD SITE AND DRAINAGE PLANDocument1 pageGINOS ENGINEERS PTY LTD SITE AND DRAINAGE PLANVinh DuongNo ratings yet
- EE-380L Lab Report on Switch Level Modeling and Simulation of Combinational CircuitsDocument14 pagesEE-380L Lab Report on Switch Level Modeling and Simulation of Combinational CircuitsTalha Mustafa JuttNo ratings yet
- D22IT184 DAA Practical1Document14 pagesD22IT184 DAA Practical1Nazil DhalwalaNo ratings yet
- 15 HR UMA Schematics DocumentDocument104 pages15 HR UMA Schematics DocumentLuis Alberto ArizaNo ratings yet
- Labt2 IEDocument10 pagesLabt2 IETalha Mustafa JuttNo ratings yet
- Assaignment 3Document7 pagesAssaignment 3Shivangi MishraNo ratings yet
- 1.5 Mounting Dimensions and Clearance RequirementsDocument3 pages1.5 Mounting Dimensions and Clearance RequirementsMuhammad Ali AsifNo ratings yet
- Am A LinDocument1,139 pagesAm A LinsupriyakajjidoniNo ratings yet
- Manuale Sanyo Denky en PDFDocument58 pagesManuale Sanyo Denky en PDFTrung Truc NguyenNo ratings yet
- Title Page: Project: Farraillage Dalle Du CaissonDocument2 pagesTitle Page: Project: Farraillage Dalle Du CaissonOUMAYMA MAJDOUBINo ratings yet
- 41 - PDFsam - REHS2891-04 TH48 E70 Mechanical A&I GuideDocument1 page41 - PDFsam - REHS2891-04 TH48 E70 Mechanical A&I GuidetvwrightNo ratings yet
- Comparing decentralized, centralized, and UPS supply chain systemsDocument4 pagesComparing decentralized, centralized, and UPS supply chain systemsJiancia WangNo ratings yet
- Highways Department: Enable Macros To Use This ApplicationDocument14 pagesHighways Department: Enable Macros To Use This ApplicationrahmangisNo ratings yet
- Adc PDFDocument62 pagesAdc PDFAkhilesh TewaryNo ratings yet
- Ieee Ieee STD - Logic - 1164: Library Use All Entity Is Generic Integer Port in Downto in Downto in Out Downto Out End EntityDocument1 pageIeee Ieee STD - Logic - 1164: Library Use All Entity Is Generic Integer Port in Downto in Downto in Out Downto Out End EntityEduardo CuadrosNo ratings yet
- Aqa A Level Gde Bdy Jun 2023Document24 pagesAqa A Level Gde Bdy Jun 2023timothyacrokerNo ratings yet
- Advanced Motion Controls DZRALTE-040L080Document8 pagesAdvanced Motion Controls DZRALTE-040L080Servo2GoNo ratings yet
- (677390326) Lab - Manual-New PDFDocument48 pages(677390326) Lab - Manual-New PDFBaisil K Babyi100% (1)
- TLV1543 ADC SPI 10bits 11 VoiesDocument30 pagesTLV1543 ADC SPI 10bits 11 Voiesloic.savorninNo ratings yet
- Advanced AutoCAD® 2017: Exercise WorkbookFrom EverandAdvanced AutoCAD® 2017: Exercise WorkbookRating: 1 out of 5 stars1/5 (1)
- CAD84: 6th International Conference and Exhibition on Computers in Design EngineeringFrom EverandCAD84: 6th International Conference and Exhibition on Computers in Design EngineeringJoanna WexlerNo ratings yet
- Times and Timers: Chapter 9 of Robbins BookDocument16 pagesTimes and Timers: Chapter 9 of Robbins BookelemaniaqNo ratings yet
- Signals: Chapter 8 of Robbins BookDocument41 pagesSignals: Chapter 8 of Robbins BookelemaniaqNo ratings yet
- BIL244-Lecture04 UnixIODocument32 pagesBIL244-Lecture04 UnixIOelemaniaqNo ratings yet
- BIL244-Lecture04 UnixIODocument32 pagesBIL244-Lecture04 UnixIOelemaniaqNo ratings yet
- Files and Directories: Chapter 5 of Robbins BookDocument30 pagesFiles and Directories: Chapter 5 of Robbins BookelemaniaqNo ratings yet
- UNIX Special Files: Chapter 6 of Robbins BookDocument17 pagesUNIX Special Files: Chapter 6 of Robbins BookelemaniaqNo ratings yet
- Processes in UNIX: Chapter 3 of Robbins BookDocument19 pagesProcesses in UNIX: Chapter 3 of Robbins BookelemaniaqNo ratings yet
- BIL 244 Systems Programming: Erkan Zergeroglu, PH.DDocument18 pagesBIL 244 Systems Programming: Erkan Zergeroglu, PH.DelemaniaqNo ratings yet
- Data Structures AND Algorithms: Lecture Notes 9Document60 pagesData Structures AND Algorithms: Lecture Notes 9elemaniaqNo ratings yet
- Thread Syncronization: Chapter 13-14 of Robbins BookDocument27 pagesThread Syncronization: Chapter 13-14 of Robbins BookelemaniaqNo ratings yet
- Programs, Processors and Threads: Chapter 2 of Robbins BookDocument21 pagesPrograms, Processors and Threads: Chapter 2 of Robbins BookelemaniaqNo ratings yet
- Data Structures AND Algorithms: Lecture Notes 8Document52 pagesData Structures AND Algorithms: Lecture Notes 8elemaniaqNo ratings yet
- Data Structures AND Algorithms: Lecture Notes 10Document104 pagesData Structures AND Algorithms: Lecture Notes 10elemaniaqNo ratings yet
- Data Structures AND Algorithms: Lecture Notes 11Document84 pagesData Structures AND Algorithms: Lecture Notes 11elemaniaqNo ratings yet
- Data Structures AND Algorithms: Lecture Notes 9Document66 pagesData Structures AND Algorithms: Lecture Notes 9elemaniaqNo ratings yet
- Data Structures and Algorithms: Asymptotic NotationsDocument28 pagesData Structures and Algorithms: Asymptotic NotationselemaniaqNo ratings yet
- Data Structures AND Algorithms: Lecture Notes 7Document31 pagesData Structures AND Algorithms: Lecture Notes 7elemaniaqNo ratings yet
- Data Structures AND Algorithms: Lecture Notes 6Document51 pagesData Structures AND Algorithms: Lecture Notes 6elemaniaqNo ratings yet
- Data Structures AND Algorithms: Bilgisayar Mühendisliği BölümüDocument17 pagesData Structures AND Algorithms: Bilgisayar Mühendisliği BölümüelemaniaqNo ratings yet
- Data Structures AND Algorithms: Lecture Notes 5Document39 pagesData Structures AND Algorithms: Lecture Notes 5elemaniaqNo ratings yet
- Data Structures and AlgorithmsDocument44 pagesData Structures and AlgorithmselemaniaqNo ratings yet
- Data Structures and Algorithms: Introduction To Software DesignDocument80 pagesData Structures and Algorithms: Introduction To Software DesignelemaniaqNo ratings yet
- A. I. SABRA - Theories of Light - Descartes.Document64 pagesA. I. SABRA - Theories of Light - Descartes.Mark Cohen100% (1)
- StatisticsDocument4 pagesStatisticsKim B. ManilaNo ratings yet
- Chapter 4 PowerPointDocument58 pagesChapter 4 PowerPointWayneNo ratings yet
- Glasgow Coma ScaleDocument3 pagesGlasgow Coma Scalerenell83181No ratings yet
- Algebraic Number Theory Notes Anwar Khan PDFDocument110 pagesAlgebraic Number Theory Notes Anwar Khan PDFSikandar KhanNo ratings yet
- Linkers and ConnectorsDocument8 pagesLinkers and ConnectorsJulio Martínez RicoNo ratings yet
- Once There Were Wolves - AnalysisDocument5 pagesOnce There Were Wolves - AnalysisДаниела ИсаевичNo ratings yet
- ANXIETY Meditation ScriptDocument2 pagesANXIETY Meditation ScriptTatjana GlogovacNo ratings yet
- BCA 3rd Sem SyllebusDocument17 pagesBCA 3rd Sem Syllebuszxg4u50% (2)
- Othello by William ShakespeareDocument5 pagesOthello by William ShakespearerajeshNo ratings yet
- Ilovepdf MergedDocument690 pagesIlovepdf MergedAndreeaPopescuNo ratings yet
- MTB MleDocument5 pagesMTB MleCarlaNo ratings yet
- Antojos by Julia AlvarezDocument24 pagesAntojos by Julia AlvarezJelena TadićNo ratings yet
- Open Source - Kerja Kursus ICTDocument11 pagesOpen Source - Kerja Kursus ICTFirdaus Ahmad100% (1)
- Log File Analysis of VoIP Application on AndroidDocument809 pagesLog File Analysis of VoIP Application on AndroidLove KoNo ratings yet
- Assignment: Name: Shazib Riaz Malik Roll No. Mit18-218 Session: MSC (It) Evening Submited To: Mam SajiyaDocument6 pagesAssignment: Name: Shazib Riaz Malik Roll No. Mit18-218 Session: MSC (It) Evening Submited To: Mam Sajiyahasnain qayyumNo ratings yet
- American Journal of Humanities and Social Sciences Research (AJHSSR)Document2 pagesAmerican Journal of Humanities and Social Sciences Research (AJHSSR)M Manzoor MalikNo ratings yet
- Dig, Dig, Dig (Oxford Reading Tree Stage 1+ Songbirds) (Donaldson Julia, Kirtley Clare)Document7 pagesDig, Dig, Dig (Oxford Reading Tree Stage 1+ Songbirds) (Donaldson Julia, Kirtley Clare)Andrej Vidovic100% (1)
- Book Club Choice BoardDocument2 pagesBook Club Choice Boardapi-556853971No ratings yet
- Math Unit Test 2Document2 pagesMath Unit Test 2divya shreeNo ratings yet
- Aotu Book 3Document216 pagesAotu Book 3Jiemalyn Asis GregorioNo ratings yet
- SaS NotesDocument8 pagesSaS NotesVelupucharla Saiprasad ReddyNo ratings yet
- Unit 3 Laws of Probability: StructureDocument18 pagesUnit 3 Laws of Probability: StructureSumundra RathNo ratings yet
- First Seminar Presentation On Sing Unburied Sing by Jesmyn Ward - Section 24Document3 pagesFirst Seminar Presentation On Sing Unburied Sing by Jesmyn Ward - Section 24hjt7cdnzhjNo ratings yet
- Grade 11 Filipino Class Focuses on Language ConceptsDocument6 pagesGrade 11 Filipino Class Focuses on Language ConceptsJeppssy Marie Concepcion MaalaNo ratings yet
- Avr EnsambladorDocument24 pagesAvr Ensambladorfabio3055No ratings yet
- Rare Yoga Part 3Document13 pagesRare Yoga Part 3VikasNo ratings yet
- Barcode in Birt ReportsDocument13 pagesBarcode in Birt ReportsGuilherme ResendeNo ratings yet
- Quarter 2 Lesson 4 Grade 8Document3 pagesQuarter 2 Lesson 4 Grade 8JAHMAE ARTIAGANo ratings yet
- Lec7matrixnorm Part2Document12 pagesLec7matrixnorm Part2Somnath DasNo ratings yet