You might also like
- TD ElectroniqueDocument13 pagesTD ElectroniqueAli Mansouri100% (2)
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabFrom EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabNo ratings yet
- Cours DiodeDocument38 pagesCours DiodebachirNo ratings yet
- Conversion PDFDocument25 pagesConversion PDFLam NovoxNo ratings yet
- Les CodeursDocument5 pagesLes CodeurskamalNo ratings yet
- Ch1 CI2 R2 Schema ElectriqueDocument14 pagesCh1 CI2 R2 Schema Electriquecpommier100% (1)
- ch4 CI9 I3 Capteur TORDocument6 pagesch4 CI9 I3 Capteur TORcpommierNo ratings yet
- Polycop Cours Automatismes IndustrielsDocument48 pagesPolycop Cours Automatismes IndustrielssalaheddinekreitNo ratings yet
- Ch10 CI11 I11 SequentielleDocument8 pagesCh10 CI11 I11 Sequentiellecpommier100% (1)
- TD 30 Corrigé - Représentation D'une Fonction LogiqueDocument6 pagesTD 30 Corrigé - Représentation D'une Fonction Logiquebhs channelNo ratings yet
- Codeur Absolu 3Document5 pagesCodeur Absolu 3Abdessattar Abdou100% (1)
- 3-Codeurs Rotatifs Industriels ProfDocument6 pages3-Codeurs Rotatifs Industriels ProfSalahDin ELNo ratings yet
- Cours Les Codeurs Rotatifs Industriels PDFDocument10 pagesCours Les Codeurs Rotatifs Industriels PDFtarikmlilas100% (1)
- 6 - Conditionnement Du SignalDocument13 pages6 - Conditionnement Du SignalbaazizNo ratings yet
- TD Application CoursDocument4 pagesTD Application Courskaram karamNo ratings yet
- CH 3 MethodeDocument13 pagesCH 3 MethodeMohamedBenKacemNo ratings yet
- Structur Sys TechDocument13 pagesStructur Sys TechWalid FattoumNo ratings yet
- ControleTheoryMecanismesDecember2018 PDFDocument2 pagesControleTheoryMecanismesDecember2018 PDFHfgjj100% (1)
- Controle Theory Mecanismes Janvier 2015Document3 pagesControle Theory Mecanismes Janvier 2015Achraf El aouameNo ratings yet
- CH3 Convertisseur AnalogiqueDocument12 pagesCH3 Convertisseur AnalogiqueMohammed AbdiNo ratings yet
- Fiabilité2019 TP AdDDocument3 pagesFiabilité2019 TP AdDAbdelghafour ErrafikNo ratings yet
- Programmation Des API Cours GoodDocument10 pagesProgrammation Des API Cours GoodZakaryae HabibNo ratings yet
- E C Logique Comb Merged FAITDocument12 pagesE C Logique Comb Merged FAITMohamed MathématicienNo ratings yet
- Rapport PFEDocument88 pagesRapport PFEtarekgara100% (1)
- LabviewDocument19 pagesLabviewtortorouNo ratings yet
- Chapitre 1: Les Actionneurs Électriques: Licence Sciences Et Techniques. Génie Mécanique R. HabachiDocument55 pagesChapitre 1: Les Actionneurs Électriques: Licence Sciences Et Techniques. Génie Mécanique R. Habachiyoussef 122No ratings yet
- Devoir de Synthèse N°1 - Génie Électrique Système de Triage Automatique - 3ème Technique (2011-2012) MR Abdallah RaouafiDocument4 pagesDevoir de Synthèse N°1 - Génie Électrique Système de Triage Automatique - 3ème Technique (2011-2012) MR Abdallah Raouafiibrahim abdelaliNo ratings yet
- Ds STM 2 PDFDocument4 pagesDs STM 2 PDFMeryemHmouriNo ratings yet
- MASTER ASE 1ère Année. Unité - Modélisation & Identification - Travaux Pratiques 2009-2010Document33 pagesMASTER ASE 1ère Année. Unité - Modélisation & Identification - Travaux Pratiques 2009-2010Alex PittNo ratings yet
- 2019 Cours Automatismes-1Document41 pages2019 Cours Automatismes-1wsrfcvNo ratings yet
- Rapport de AKAFFOUDocument16 pagesRapport de AKAFFOUkpea chris dylanNo ratings yet
- ch4 CircuitscombinatoiresDocument8 pagesch4 CircuitscombinatoiresKais BouzraraNo ratings yet
- Serie Exo AutomatismesDocument8 pagesSerie Exo AutomatismesSalimMalekNo ratings yet
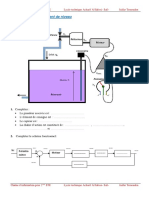
- Asservissement de Niveau ExerciceDocument1 pageAsservissement de Niveau Exerciceiman khadir0% (1)
- Cap TeurDocument9 pagesCap TeurNaim NezeNo ratings yet
- Physique-STI-Génie ElectrotechniqueDocument13 pagesPhysique-STI-Génie ElectrotechniqueLetudiant.frNo ratings yet
- Cours Systémes Echantillonnés 1Document13 pagesCours Systémes Echantillonnés 1Shompinho Matloaa100% (1)
- Exercice PIC LCD LM35Document4 pagesExercice PIC LCD LM35nawzatNo ratings yet
- TP5-1 FeuxDocument6 pagesTP5-1 FeuxsakiinaNo ratings yet
- TD Capteurs ConditionnementDocument7 pagesTD Capteurs ConditionnementMohamed MachloulNo ratings yet
- Chapitre 1 Generalites Sur Les Systemes AsservisDocument5 pagesChapitre 1 Generalites Sur Les Systemes AsservisLarbi Elbakkali0% (1)
- CCF MicrocontroleurDocument4 pagesCCF MicrocontroleurLAPPNo ratings yet
- Cours 01 - Etude Des Systèmes PDFDocument19 pagesCours 01 - Etude Des Systèmes PDFeslochNo ratings yet
- 8-Interfacage LabVIEW SolidWorksDocument19 pages8-Interfacage LabVIEW SolidWorksMahrez Zaafouri100% (2)
- 1-2 Fiche-TD-capteur Et ComparateurDocument1 page1-2 Fiche-TD-capteur Et ComparateurJalil AkaabouneNo ratings yet
- Abdou. Initiation API Millenium 3Document21 pagesAbdou. Initiation API Millenium 3sethabdellahNo ratings yet
- TD3 ARN v1Document8 pagesTD3 ARN v1mariem ezzineNo ratings yet
- Correction EXamen 2018 Actionneur SpéciauxDocument4 pagesCorrection EXamen 2018 Actionneur Spéciauxkhaled100% (1)
- Commande NumériqueDocument17 pagesCommande NumériqueDayang Dayang100% (1)
- Correction Manuel D'activité 20-39Document20 pagesCorrection Manuel D'activité 20-39Oula F'zNo ratings yet
- 00 Résumé TransmettreDocument2 pages00 Résumé TransmettreSamir Bouhiyadi SamirNo ratings yet
- A22-Opérations D'arithmétique Binaire - v19 - 2Document6 pagesA22-Opérations D'arithmétique Binaire - v19 - 2Rafik Ben AmorNo ratings yet
- Projet VHDLDocument6 pagesProjet VHDLFadwa JabriNo ratings yet
- TD1 MasterDocument2 pagesTD1 Masterbadis hamhoum100% (1)
- Manuel D'activitéDocument192 pagesManuel D'activitéfehmi001100% (1)
- Fiche de Formalisation-Variateur Alter Nat IfDocument1 pageFiche de Formalisation-Variateur Alter Nat IfBel AmiNo ratings yet
- Verins Pneumatiques E12c-2Document2 pagesVerins Pneumatiques E12c-2dsiscnNo ratings yet
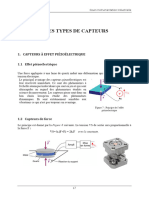
- Chapitre 2 Cours Instrumentation Industrielle Les Types Des CapteursDocument14 pagesChapitre 2 Cours Instrumentation Industrielle Les Types Des CapteursAziz Zizou100% (1)
- Chapitre 1 Architecture Pic 16f877Document25 pagesChapitre 1 Architecture Pic 16f877Moujahed GassoumiNo ratings yet
- Logique Programmable Mémoires Mortes: PROM, EPROM, EEPROM: Conception Et Implémentation de Systèmes NumériquesDocument16 pagesLogique Programmable Mémoires Mortes: PROM, EPROM, EEPROM: Conception Et Implémentation de Systèmes NumériquesGray AbNo ratings yet
- Les Codeurs PDFDocument5 pagesLes Codeurs PDFtarikmlilasNo ratings yet
- Expose DetecteursDocument15 pagesExpose DetecteursPatrice CamaraNo ratings yet
- Les CodeursDocument2 pagesLes CodeursKarim KarimmNo ratings yet
- Codeur IncDocument4 pagesCodeur IncassiahakmiNo ratings yet
- Type de RessortDocument3 pagesType de RessortcpommierNo ratings yet
- AlgorithmeDocument10 pagesAlgorithmecpommierNo ratings yet
- Ch15 CI5 E11 Transmission PuissanceDocument8 pagesCh15 CI5 E11 Transmission Puissancecpommier100% (1)
- Ch18 CI3 E3 Moteur LineaireDocument3 pagesCh18 CI3 E3 Moteur LineairecpommierNo ratings yet
- Ch13 CI11 I10 Algorigramme LitteralDocument8 pagesCh13 CI11 I10 Algorigramme LitteralcpommierNo ratings yet
- Ch2 CI2 R4 PneumatiqueDocument7 pagesCh2 CI2 R4 Pneumatiquecpommier100% (2)
- Serie 4 Ensa 22-23Document2 pagesSerie 4 Ensa 22-23ismailNo ratings yet
- BMR FRDocument3 pagesBMR FRrafikNo ratings yet
- dc1 4emeScExp Sadiki 12-13-1Document4 pagesdc1 4emeScExp Sadiki 12-13-1ben zayed ali100% (1)
- 25017489Document145 pages25017489abdeldjabbar14No ratings yet
- Microsoft Word - Exposé IRM - 1Document16 pagesMicrosoft Word - Exposé IRM - 1Eng-Mugahed Almansor100% (1)
- +fiche Technique Spot LED 6W MONODocument1 page+fiche Technique Spot LED 6W MONOالمجهول المجهولNo ratings yet
- 2 MCC 1 PDFDocument10 pages2 MCC 1 PDFمفتاح الدينNo ratings yet
- Série de TD 1Document3 pagesSérie de TD 1Děmøïšěllë RãnNo ratings yet
- Axeasservi-Maxpid DR PDFDocument37 pagesAxeasservi-Maxpid DR PDFAFAFNo ratings yet
- Devoir 2Document1 pageDevoir 2Mohamed BelkhaddarNo ratings yet
- Chap2 Variations de Vitesse de La MCCDocument11 pagesChap2 Variations de Vitesse de La MCCYoucef KhelikaNo ratings yet
- Désignation Des Conducteurs Exercices CorrigéDocument2 pagesDésignation Des Conducteurs Exercices Corrigérabah amrouche100% (1)
- 2014 TH 18429 Magnoun Youness PDFDocument114 pages2014 TH 18429 Magnoun Youness PDFسمير المتوليNo ratings yet
- Examen 2019-2020 - Corrigé.Document6 pagesExamen 2019-2020 - Corrigé.Ecovillage MondeNo ratings yet
- Chapitre11 - FiltrageDocument13 pagesChapitre11 - FiltrageMohammed TAOUSSINo ratings yet
- Sans Nom 1Document32 pagesSans Nom 1M'hatli MalekNo ratings yet
- Prisma PlusDocument275 pagesPrisma PlusMOURABIHNo ratings yet
- Electrostatique DevoirDocument1 pageElectrostatique DevoirMODESTE KASSEMNo ratings yet
- RMNH18 VcorDocument43 pagesRMNH18 Vcorezo ezoNo ratings yet
- 04.3 - Circuit D'aide À La Commutation PDFDocument2 pages04.3 - Circuit D'aide À La Commutation PDFAnonymous 78iAn6No ratings yet
- Commande D'un Filtre Actif Parallèle À Trois Niveaux (NPC) Par Différentes Stratégies de CommandeDocument68 pagesCommande D'un Filtre Actif Parallèle À Trois Niveaux (NPC) Par Différentes Stratégies de Commandegali mohNo ratings yet
- Notions Doptique FRAJ NidhalDocument23 pagesNotions Doptique FRAJ NidhalJean Matthieu MohulembiNo ratings yet
- Moteurs ElectriquesDocument24 pagesMoteurs ElectriquesMoussa SowNo ratings yet
- Electronique M1Document66 pagesElectronique M1Hajli NoureddineNo ratings yet
- P44x - Fonctions de Protection - REVB - FRDocument159 pagesP44x - Fonctions de Protection - REVB - FRmedNo ratings yet
- TP E4 PileDocument2 pagesTP E4 PileSam Fairire100% (1)
- Exercices Sur Les Milieux DielectriquesDocument5 pagesExercices Sur Les Milieux DielectriquesSahsah Abdeslam100% (1)
- Projet de Scénographie FictifDocument56 pagesProjet de Scénographie Fictiflily.fleurNo ratings yet