You might also like
- 00908a - Using The DsPIC30F For Vector Control of An ACIMDocument76 pages00908a - Using The DsPIC30F For Vector Control of An ACIMJandfor Tansfg ErrottNo ratings yet
- DavidDocument25 pagesDavidgtchsekharNo ratings yet
- Brushed DC Sensorless FeedbackDocument3 pagesBrushed DC Sensorless FeedbackHoon Miew JieNo ratings yet
- Chapter 1 Introduction A. Background: Full Speed, Torque Acceleration Deceleration. Power ConsumptionDocument13 pagesChapter 1 Introduction A. Background: Full Speed, Torque Acceleration Deceleration. Power ConsumptionfirmanNo ratings yet
- Ijaiem 2013 08 25 054Document11 pagesIjaiem 2013 08 25 054International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Simplified Sensorless Control For BLDC Motor, Using DSP TechnologyDocument12 pagesSimplified Sensorless Control For BLDC Motor, Using DSP Technologymichael.schuhNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Scalar Speed Control of Induction MotorsDocument21 pagesScalar Speed Control of Induction MotorsRami100% (1)
- Chapter 2 NewDocument11 pagesChapter 2 NewKyaw SoeNo ratings yet
- Field Oriented Control Reduces Motor Size, Cost and Power Consumption in Industrial ApplicationsDocument6 pagesField Oriented Control Reduces Motor Size, Cost and Power Consumption in Industrial ApplicationsnikanikolinaNo ratings yet
- State of The Art of Induction Motor ControlDocument6 pagesState of The Art of Induction Motor Controldusan.papez9216No ratings yet
- Servomotor-synchro- AC Tachometers GuideDocument9 pagesServomotor-synchro- AC Tachometers GuideNarendra SinhaNo ratings yet
- Simplified Sensorless Control For BLDC MDocument12 pagesSimplified Sensorless Control For BLDC MAlg DimasNo ratings yet
- SPWM V/HZ InverterDocument51 pagesSPWM V/HZ InverterLabi BajracharyaNo ratings yet
- Closed Loop Speed Control of 3-Phase Induction MotorDocument27 pagesClosed Loop Speed Control of 3-Phase Induction MotorRajesh kumar yadavNo ratings yet
- Design and Implementation of The Extended Kalman Filter For The Speed and Rotor Position Estimation of Brushless DC MotorDocument9 pagesDesign and Implementation of The Extended Kalman Filter For The Speed and Rotor Position Estimation of Brushless DC MotorSoujanya VinnakotaNo ratings yet
- Electric Drive Q-Bank AnswersDocument22 pagesElectric Drive Q-Bank AnswersGoud SannyNo ratings yet
- Direct Torque Control (DTC) in Induction Motor: M.G.MorshadDocument12 pagesDirect Torque Control (DTC) in Induction Motor: M.G.MorshadAdil FarzandNo ratings yet
- Extended Kalman Filter Based Speed Sensorless PMSM Control with Load ReconstructionDocument16 pagesExtended Kalman Filter Based Speed Sensorless PMSM Control with Load ReconstructionSohibul HajahNo ratings yet
- Sensorless FOC of ACIDocument43 pagesSensorless FOC of ACIdimitaringNo ratings yet
- Direct Torque Control InductionDocument9 pagesDirect Torque Control InductiononafetsNo ratings yet
- Speed Control of Three Phase Induction Motor Using Arduino and V/F TechniqueDocument10 pagesSpeed Control of Three Phase Induction Motor Using Arduino and V/F TechniqueAnonymous oyUAtpKNo ratings yet
- Vsi Fed 3ph ImDocument13 pagesVsi Fed 3ph ImWisemin LinsNo ratings yet
- Permanent Magnet Synchronous Motor ControlDocument7 pagesPermanent Magnet Synchronous Motor ControlAmjad JatoiNo ratings yet
- National Institute of Technology, Rourkela: Department of Electrical EngineeringDocument11 pagesNational Institute of Technology, Rourkela: Department of Electrical Engineeringvineeth kumarNo ratings yet
- Classical Control Methods for Power ConvertersDocument9 pagesClassical Control Methods for Power ConvertersEmmeth ArdienteNo ratings yet
- Implementing Embedded Speed Control For Brushless DC Motors Part 6Document7 pagesImplementing Embedded Speed Control For Brushless DC Motors Part 6charliesteven100% (1)
- Control system force-voltage analogyDocument18 pagesControl system force-voltage analogyAjeet Kumar shuklaNo ratings yet
- Rotor Flux Oriented Control of Induction MachinesDocument32 pagesRotor Flux Oriented Control of Induction MachinesGuru PrasadNo ratings yet
- 03 Listrik Statis 3Document11 pages03 Listrik Statis 3goodayNo ratings yet
- SFC OperationDocument10 pagesSFC OperationKelvin LiewNo ratings yet
- Induction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareDocument6 pagesInduction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareASumeethKumarNo ratings yet
- Position Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionDocument14 pagesPosition Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionأسامةبوعزيزNo ratings yet
- Speed Control of Three Phase Induction MotorDocument48 pagesSpeed Control of Three Phase Induction MotorChancy Dash100% (3)
- Simulation and Implementation of Current Control of Brushless DC Motor Based On A Common DC SignalDocument8 pagesSimulation and Implementation of Current Control of Brushless DC Motor Based On A Common DC SignalVally ZazaNo ratings yet
- Speed control of 3-phase IM using V/Hz for auto appsDocument6 pagesSpeed control of 3-phase IM using V/Hz for auto appsPrabhat KarnNo ratings yet
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviNo ratings yet
- Permanent Magnet Synchronous Motor ControlDocument3 pagesPermanent Magnet Synchronous Motor ControlMarcin KowalskiNo ratings yet
- DC Motor Control Using Arduino: 1) IntroductionDocument10 pagesDC Motor Control Using Arduino: 1) IntroductionSoeAyeNo ratings yet
- Induction Motor.Document6 pagesInduction Motor.Kiran KumarNo ratings yet
- Current Control of Brushless DC Motor Based On A Common DC Signal For Space Operated VehicleDocument7 pagesCurrent Control of Brushless DC Motor Based On A Common DC Signal For Space Operated VehicleArif HassanNo ratings yet
- AVR194 Brushless DC Motor Control Using ATMega32M1Document16 pagesAVR194 Brushless DC Motor Control Using ATMega32M1u776287No ratings yet
- Project Synopsys1Document6 pagesProject Synopsys1jvnsr005No ratings yet
- Design and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452Document4 pagesDesign and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452lajosmol100% (1)
- Sensorbased Control of Three Phase Brushless DC Motor PDFDocument8 pagesSensorbased Control of Three Phase Brushless DC Motor PDFmike_helplineNo ratings yet
- New Sensor LessDocument10 pagesNew Sensor LessAbhishek AgarwalNo ratings yet
- 1405 6815 PDFDocument7 pages1405 6815 PDFPrashanthSamaNo ratings yet
- PROBLEM STATEMENT FOR TEMPERATURE CONTROL OF POLYHOUSESDocument36 pagesPROBLEM STATEMENT FOR TEMPERATURE CONTROL OF POLYHOUSESAbhishek SinghNo ratings yet
- Lecture-16-Direct Torque Control PDFDocument33 pagesLecture-16-Direct Torque Control PDFKriban Govender100% (1)
- Motor Commutation - FOC vs. FECDocument5 pagesMotor Commutation - FOC vs. FECKhang Trần VỹNo ratings yet
- EKF Applied To BLDCDocument9 pagesEKF Applied To BLDCUma SathyadevanNo ratings yet
- CNC MCU Act Sys and MCU OrganisationDocument6 pagesCNC MCU Act Sys and MCU OrganisationsaitejaNo ratings yet
- Unit - V Synchronous Drives: 1 Variable Frequency ControlDocument22 pagesUnit - V Synchronous Drives: 1 Variable Frequency ControlHaripriya PalemNo ratings yet
- Atmel 2596 Sensor Based Control of Three Phase Brushless DC Motors Application Note Avr443Document9 pagesAtmel 2596 Sensor Based Control of Three Phase Brushless DC Motors Application Note Avr443Bogdan CosteaNo ratings yet
- Speed Control of Induction Motor Using FOCDocument5 pagesSpeed Control of Induction Motor Using FOCCharlotte ReynoldsNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Ect129 Uninterruptible Static Power Supplies and The Protection of PersonsDocument44 pagesEct129 Uninterruptible Static Power Supplies and The Protection of PersonsMarko VujicaNo ratings yet
- Uhc AwatersDocument60 pagesUhc Awaterskammu9713No ratings yet
- Ethernet IP Texas InstrumentsDocument6 pagesEthernet IP Texas InstrumentsFranzKafkaNo ratings yet
- Evaluation and DSP Based Implementation of PWM Approaches For SinDocument90 pagesEvaluation and DSP Based Implementation of PWM Approaches For SinPhạm Văn TưởngNo ratings yet
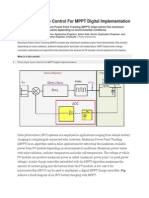
- Direct Duty Cycle Control For MPPT Digital ImplementationDocument5 pagesDirect Duty Cycle Control For MPPT Digital ImplementationPhạm Văn TưởngNo ratings yet
- All About HarmonicsDocument240 pagesAll About HarmonicsKhushal KharadeNo ratings yet
- Calculation of Short-Circuit CurrentsDocument35 pagesCalculation of Short-Circuit CurrentsdaodoquangNo ratings yet
- Control Intelligence Improves Renewable Energy EfficiencyDocument7 pagesControl Intelligence Improves Renewable Energy EfficiencyPhạm Văn TưởngNo ratings yet
- Disturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignDocument10 pagesDisturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignPhạm Văn TưởngNo ratings yet
- AN296110 Current Sensing For Renewable EnergyDocument4 pagesAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngNo ratings yet
- C Programming For Embedded System Applications PDFDocument54 pagesC Programming For Embedded System Applications PDFWendo David PesaNo ratings yet
- The Adventures of Huckleberry Finn by Mark TwainDocument289 pagesThe Adventures of Huckleberry Finn by Mark TwainBooks100% (5)
- Tutorial Digital Control Loop DesignDocument17 pagesTutorial Digital Control Loop DesignPhạm Văn TưởngNo ratings yet
- 309 An 09 Solar Panel PowerDocument3 pages309 An 09 Solar Panel PowerJoel Medina GuttiNo ratings yet
- Slaa 075Document19 pagesSlaa 075Manidhar ParvatamNo ratings yet
- Current-Transformer Phase-Shift Compensation and CalibrationDocument7 pagesCurrent-Transformer Phase-Shift Compensation and CalibrationrsrtnjNo ratings yet
- Study of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuDocument8 pagesStudy of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuPhạm Văn Tưởng100% (1)
- TW Exams Ielts How To Prepare Ielts TipsDocument2 pagesTW Exams Ielts How To Prepare Ielts TipsHoda ElhadaryNo ratings yet
- IEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsDocument9 pagesIEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsPhạm Văn TưởngNo ratings yet
- An Improved PV Battery Charger For Low Cost Low PowerDocument4 pagesAn Improved PV Battery Charger For Low Cost Low PowerPhạm Văn TưởngNo ratings yet
- Space Vector Modulation An IntroductionDocument10 pagesSpace Vector Modulation An IntroductionJohan LinderNo ratings yet
- A Novel Dynamic Var CompensatorDocument4 pagesA Novel Dynamic Var CompensatorPhạm Văn TưởngNo ratings yet
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDocument9 pagesUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngNo ratings yet
- IEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityDocument7 pagesIEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityPhạm Văn TưởngNo ratings yet
- 1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemsDocument6 pages1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemschethanNo ratings yet
- Informatics in Control Automation and RoboticsDocument5 pagesInformatics in Control Automation and RoboticsPhạm Văn TưởngNo ratings yet
- NHSPE ReadingDocument5 pagesNHSPE ReadingMohamed HanafiNo ratings yet
- Phan Tich 1 Bai Task 2 by Ngoc BachDocument4 pagesPhan Tich 1 Bai Task 2 by Ngoc BachPhạm Văn Tưởng100% (1)
- (Matsui) Sensorless PM Brushless DC Motor DrivesDocument9 pages(Matsui) Sensorless PM Brushless DC Motor DrivesPhạm Văn TưởngNo ratings yet
- Inverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewDocument6 pagesInverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewPhạm Văn TưởngNo ratings yet