You might also like
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadFrom EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadRating: 5 out of 5 stars5/5 (1)
- ArduinoDocument36 pagesArduinoTomas Rodriguez100% (2)
- Taller de Arduino. Experimentando con Arduino MKR 1010From EverandTaller de Arduino. Experimentando con Arduino MKR 1010No ratings yet
- Primeros Pasos Con Arduino y XBeeDocument9 pagesPrimeros Pasos Con Arduino y XBeeMC. Rene Solis R.80% (5)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosFrom EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosRating: 5 out of 5 stars5/5 (5)
- Tutorial Arduino 04 - EjerciciosDocument15 pagesTutorial Arduino 04 - EjerciciosMC. Rene Solis R.100% (3)
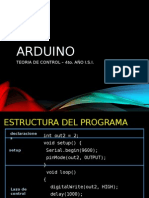
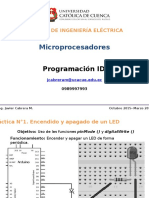
- Arduino ProgramaciónDocument52 pagesArduino ProgramaciónJose Torres Nuñez100% (7)
- Monitoreo, control y adquisición de datos con arduino y visual basic .netFrom EverandMonitoreo, control y adquisición de datos con arduino y visual basic .netNo ratings yet
- Arduino PracticasDocument72 pagesArduino PracticasSuleyman Delgado100% (3)
- Arduino: aplicaciones en robótica, mecatrónica e ingenieríasFrom EverandArduino: aplicaciones en robótica, mecatrónica e ingenieríasNo ratings yet
- Computacion Fisica y ArduinoDocument51 pagesComputacion Fisica y ArduinoMarlon J. ManriqueNo ratings yet
- Google Assistant. Desarrollo de aplicaciones IoT para Arduino y ESP8266From EverandGoogle Assistant. Desarrollo de aplicaciones IoT para Arduino y ESP8266No ratings yet
- Practicas Con Arduino 2 ExcelenteDocument123 pagesPracticas Con Arduino 2 Excelentewaport100% (19)
- Arduino + Android Jorge Antonio Gonzalez MontalvoDocument11 pagesArduino + Android Jorge Antonio Gonzalez MontalvoWilbert Isaac100% (1)
- Practicas Arduino Muy BuenoDocument78 pagesPracticas Arduino Muy BuenoJavier100% (6)
- Raspberry Pi Fundamentos y Aplicaciones: HARDWARE (O SOPORTE FÍSICO DEL ORDENADOR)From EverandRaspberry Pi Fundamentos y Aplicaciones: HARDWARE (O SOPORTE FÍSICO DEL ORDENADOR)Rating: 5 out of 5 stars5/5 (5)
- Programacion ArduinoDocument29 pagesProgramacion ArduinoMacramé100% (3)
- Aprender Raspberry Pi 4 con 100 ejercicios prácticosFrom EverandAprender Raspberry Pi 4 con 100 ejercicios prácticosRating: 5 out of 5 stars5/5 (4)
- Libro Basico ArduinoDocument120 pagesLibro Basico ArduinoAristoteles Carreño100% (6)
- Libro Basico ArduinoDocument120 pagesLibro Basico ArduinoJimena AL95% (21)
- Ejercicios de Arduino ResueltosDocument31 pagesEjercicios de Arduino ResueltosAlberto Espinoza92% (12)
- Sensor Temperatura Usando LM35 + ArduinoDocument1 pageSensor Temperatura Usando LM35 + ArduinoMC. Rene Solis R.100% (1)
- Guia de Arduino para Principiantes Proyectos y TutorialesDocument171 pagesGuia de Arduino para Principiantes Proyectos y TutorialesKikote Cas Es90% (10)
- Manual de Usuario Modulo 8Document126 pagesManual de Usuario Modulo 8Jose Luis93% (14)
- Libro Azul Manual Arduino en EspañolDocument123 pagesLibro Azul Manual Arduino en EspañolAngel Herbra92% (36)
- Curso de Arduino MegatronicaDocument143 pagesCurso de Arduino MegatronicaPablo V Salazar100% (10)
- Arduinoprctico2014 140712025133 Phpapp02Document60 pagesArduinoprctico2014 140712025133 Phpapp02Brian Zuñagua FloresNo ratings yet
- Arduino Paso A PasoDocument30 pagesArduino Paso A Pasojuanpablopatino100% (1)
- Practicas Con Arduino Nivel IDocument73 pagesPracticas Con Arduino Nivel Ialvaronevi100% (6)
- Tutorial Con Arduino para Mover Un Motor DCDocument5 pagesTutorial Con Arduino para Mover Un Motor DCJose Cuida100% (4)
- Curso de Arduino PDFDocument9 pagesCurso de Arduino PDFAnonymous 9SR30jFlLdNo ratings yet
- Ejercicios de Arduino ResueltosDocument31 pagesEjercicios de Arduino ResueltosEnrique LopezNo ratings yet
- Cómo Hacer Un SumobotDocument20 pagesCómo Hacer Un SumobotJose Neira Galvez100% (1)
- Fichas Tecnicas Mesa LabDocument8 pagesFichas Tecnicas Mesa LabNatha RojasNo ratings yet
- Cinta Transportadora ArduinoDocument35 pagesCinta Transportadora ArduinoGonzalo Lenarduzzi100% (2)
- Documento Sin TítuloDocument27 pagesDocumento Sin TítuloRichiyRamirezGarciaNo ratings yet
- MANUAL DE OPERACION. Brazo Robótico HELEN - 1Document15 pagesMANUAL DE OPERACION. Brazo Robótico HELEN - 1RichiyRamirezGarciaNo ratings yet
- Robot 1 PDFDocument35 pagesRobot 1 PDFJois Lenny Mendoza LoayzaNo ratings yet
- Quadruino RobotDocument17 pagesQuadruino RobotJuan SNo ratings yet
- Manual de Uso Arduino UNODocument11 pagesManual de Uso Arduino UNOEmmanuel PereyraNo ratings yet
- Robot Controlado Por Bluetoo Con Programación de ArduinoDocument9 pagesRobot Controlado Por Bluetoo Con Programación de ArduinoRomi Arenas BustinzaNo ratings yet
- 7WF736SDAM Manual de Uso y CuidadoDocument19 pages7WF736SDAM Manual de Uso y CuidadoAlfredo De La Hoz Guarin0% (1)
- MID 039 - CID 0600 - FMI 04: Cerrar SISDocument3 pagesMID 039 - CID 0600 - FMI 04: Cerrar SISgenaroNo ratings yet
- Diagrama de Pines para ATmega 328p de Tipo TQFPDocument20 pagesDiagrama de Pines para ATmega 328p de Tipo TQFPMaxAbraham06No ratings yet
- Arduino Uno Rev 3: DescripciónDocument6 pagesArduino Uno Rev 3: DescripciónBracher NavaNo ratings yet
- ServoMotor Con ArduinoDocument8 pagesServoMotor Con ArduinoLaboratorio de Robótica Educativa UTN-FRTNo ratings yet
- AnteproyectoDocument7 pagesAnteproyectoCarlos AguilarNo ratings yet
- Anexos Trabajo de MecaDocument8 pagesAnexos Trabajo de MecaJhoel MedranoNo ratings yet
- Aplicaciones en ArduinoDocument11 pagesAplicaciones en ArduinoJhonathan HuamaniNo ratings yet
- Informe Seguidor de LineaDocument27 pagesInforme Seguidor de LineaNicko Vivar0% (1)
- Informe de Cerradura Electronica PDFDocument16 pagesInforme de Cerradura Electronica PDFGROWERNo ratings yet
- Arrancador Suave de Media Tensión: Luiz Cláudio Santos - WEG Automation Marzo, 2011Document71 pagesArrancador Suave de Media Tensión: Luiz Cláudio Santos - WEG Automation Marzo, 2011Abel Edwin Ccoyccosi ChuraNo ratings yet
- Prototipado IoTDocument29 pagesPrototipado IoTDylan Ivan Villarreal ToscanoNo ratings yet
- Control de Motor DC - Proyecto S.C.Document8 pagesControl de Motor DC - Proyecto S.C.DIAZFRANK549100% (1)
- Robot ArduinoDocument10 pagesRobot ArduinoMarcos Guerra MedinaNo ratings yet
- Trac: Gestión de Proyectos de Desarrollo de SoftwareDocument8 pagesTrac: Gestión de Proyectos de Desarrollo de SoftwareEsteban Saavedra LópezNo ratings yet
- ZombiesDocument39 pagesZombiesDavid FernándezNo ratings yet
- Driver de Motor A Pasos Con L293dDocument31 pagesDriver de Motor A Pasos Con L293dIbette De Leon RodriguezNo ratings yet
- Guia MCI - Servo Motor Con ArduinoDocument7 pagesGuia MCI - Servo Motor Con Arduinobitos2002No ratings yet
- Ficha 03 - AbocardadoDocument4 pagesFicha 03 - AbocardadoJosé PerezNo ratings yet
- Diagnostico de La Localidad Urbana de CatillucDocument124 pagesDiagnostico de La Localidad Urbana de CatillucGary Chavez Vasquez67% (6)
- Practica N°05 Empuje Lateral SuelosDocument4 pagesPractica N°05 Empuje Lateral SuelosJuan Karlos Hcc0% (1)
- Requisitos Banesco Banco UniversalDocument1 pageRequisitos Banesco Banco UniversalElMundoEconomiaNo ratings yet
- Cruces Seguel RodrigoDocument151 pagesCruces Seguel RodrigoApril CraigNo ratings yet
- Examen Core ToolsDocument32 pagesExamen Core ToolsNestorNo ratings yet
- Manuel Mallea Gómez Control Semana 7 Nuevas Tendencias en RR - HHDocument4 pagesManuel Mallea Gómez Control Semana 7 Nuevas Tendencias en RR - HHanon_30571100% (3)
- Guia de Laboratorio #1Document4 pagesGuia de Laboratorio #1Patryck ClementeNo ratings yet
- Estado de Crecimiento ProporcionadoDocument9 pagesEstado de Crecimiento ProporcionadoKelvin RamirezNo ratings yet
- Motivación Laboral PPT PDFDocument14 pagesMotivación Laboral PPT PDFMargot GálvezNo ratings yet
- LdapDocument21 pagesLdapjaime velezNo ratings yet
- Distribución HipergeométricaDocument3 pagesDistribución Hipergeométricaedisson83% (12)
- Erp BaanDocument11 pagesErp BaanAlexander Quispe CruzNo ratings yet
- AP7-AA4-Ev1-Desarrollo de Aplicaciones Windows Con C# y Visual StudioDocument11 pagesAP7-AA4-Ev1-Desarrollo de Aplicaciones Windows Con C# y Visual Studiocall center ventas y serviciosNo ratings yet
- PL 05 Plan Gestion de CostosDocument6 pagesPL 05 Plan Gestion de CostosEdgar Jara GavidiaNo ratings yet
- MicrosDocument39 pagesMicrosValentina Urritia CastroNo ratings yet
- Proteus VSM 1Document20 pagesProteus VSM 1frank_g_l1979No ratings yet
- Examen de Informatica AplicadaDocument1 pageExamen de Informatica AplicadaYamile Nayeli Llamo HuatucoNo ratings yet
- Las 5 Fuerzas de Porter JudithDocument4 pagesLas 5 Fuerzas de Porter Judithjudith100% (2)
- Monografia Diseño EstructuralDocument17 pagesMonografia Diseño EstructuralFelix Sander Merino Romero0% (1)
- (Examen) Tecnologia de Informacion Y Comunicacion (40 Preg)Document4 pages(Examen) Tecnologia de Informacion Y Comunicacion (40 Preg)Alicia Rodríguez67% (3)
- Anexos A-LDocument127 pagesAnexos A-LLizeth Lorena Molina GarciaNo ratings yet
- S7-300-Configuracion Manual de Instalacion PDFDocument242 pagesS7-300-Configuracion Manual de Instalacion PDFFernandoJoseRomeroNo ratings yet
- Perfil Del Administrador de Recursos HumanosDocument6 pagesPerfil Del Administrador de Recursos HumanosJE YufraNo ratings yet
- Plan de Gobierno SunampeDocument21 pagesPlan de Gobierno SunampeJorge Saldaña YauriNo ratings yet
- PROINELCADocument11 pagesPROINELCAtpgrqmcrzhNo ratings yet
- Metodologia para Realizar Auditorias de Sistemas ComputacionalesDocument8 pagesMetodologia para Realizar Auditorias de Sistemas ComputacionalesAlexander CartagenaNo ratings yet
- Depositos Retencion Calculo HidráulicoDocument18 pagesDepositos Retencion Calculo HidráulicoEfraín Chambi LaricoNo ratings yet
- Parque Quebrada de MaculDocument50 pagesParque Quebrada de MaculDavid AaronNo ratings yet
- Orden de Encendido en MotoresDocument3 pagesOrden de Encendido en MotoresMarisa RamírezNo ratings yet