You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Horney, Karen - Self Analysis PDFDocument154 pagesHorney, Karen - Self Analysis PDFdamari67No ratings yet
- Pile Progress CG PrésentationDocument1 pagePile Progress CG PrésentationAlhad PanwalkarNo ratings yet
- UGC-01-GEO-SCP-1101-003: Cuffe Parade Station Typical Arrays of InstrumentationDocument1 pageUGC-01-GEO-SCP-1101-003: Cuffe Parade Station Typical Arrays of InstrumentationAlhad PanwalkarNo ratings yet
- Table of Score EquivalentDocument3 pagesTable of Score EquivalentCaroline Paratcha67% (3)
- Churchgate Station Corners StabilityDocument13 pagesChurchgate Station Corners StabilityAlhad PanwalkarNo ratings yet
- Ugc 01 Geo SCP 1101 005 ADocument1 pageUgc 01 Geo SCP 1101 005 AAlhad PanwalkarNo ratings yet
- Introduction To Architectural Programming PDFDocument92 pagesIntroduction To Architectural Programming PDFMardhiatul KharimaNo ratings yet
- CEE471 SyllabusDocument2 pagesCEE471 SyllabusSuhail ShethNo ratings yet
- Stress and Coping For Adolescents. John Smith. James Cook UniversityDocument11 pagesStress and Coping For Adolescents. John Smith. James Cook UniversityRofiqoh Noer100% (2)
- History and Philosophy in Science TeachingDocument392 pagesHistory and Philosophy in Science TeachingCitra OktasariNo ratings yet
- Physiotherapy and Mental HealthDocument27 pagesPhysiotherapy and Mental Healthlilz_rodriguesNo ratings yet
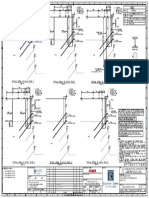
- UGC-01-CAC-SCG-3XXX-XX2: Churchgate Station Temporary Secant Pile Wall Elevation Sheet 2 of 3Document1 pageUGC-01-CAC-SCG-3XXX-XX2: Churchgate Station Temporary Secant Pile Wall Elevation Sheet 2 of 3Alhad PanwalkarNo ratings yet
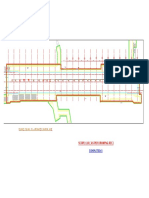
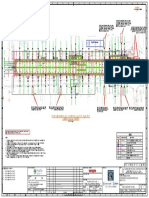
- UGC-01-CAC-SCG-3XXX-001: Churchgate Station GRID 02 - 14, LVL-5 Sheet 1 of 2Document1 pageUGC-01-CAC-SCG-3XXX-001: Churchgate Station GRID 02 - 14, LVL-5 Sheet 1 of 2Alhad PanwalkarNo ratings yet
- UGC-01-CAC-SCG-3XXX-001: Churchgate Station GRID 02 - 14, LVL-5 Sheet 1 of 2Document1 pageUGC-01-CAC-SCG-3XXX-001: Churchgate Station GRID 02 - 14, LVL-5 Sheet 1 of 2Alhad PanwalkarNo ratings yet
- Churchgate Station Temporary Secant Pile Wall Elevation Sheet 1 of 3Document1 pageChurchgate Station Temporary Secant Pile Wall Elevation Sheet 1 of 3Alhad PanwalkarNo ratings yet
- UGC-01-CAC-SCG-XXXXX-001: Churchgate Station GRID 14 - 24, LVL-4 Sheet 1 of 2Document1 pageUGC-01-CAC-SCG-XXXXX-001: Churchgate Station GRID 14 - 24, LVL-4 Sheet 1 of 2Alhad PanwalkarNo ratings yet
- UGC-01-CAC-SCG-XXXXX-001: Churchgate Station GRID 14 - 24, LVL-4 Sheet 1 of 2Document1 pageUGC-01-CAC-SCG-XXXXX-001: Churchgate Station GRID 14 - 24, LVL-4 Sheet 1 of 2Alhad PanwalkarNo ratings yet
- UGC-01-CAC-SCG-XXXXX-001: Churchgate Station GRID 14 - 24, LVL-4 Sheet 1 of 2Document1 pageUGC-01-CAC-SCG-XXXXX-001: Churchgate Station GRID 14 - 24, LVL-4 Sheet 1 of 2Alhad PanwalkarNo ratings yet
- 2017-06-28 MMRC Presentation - Column Options-2017-06-28 - LatestDocument49 pages2017-06-28 MMRC Presentation - Column Options-2017-06-28 - LatestAlhad PanwalkarNo ratings yet
- List of Drawings: LTS-CAC-SCG-3920-001Document1 pageList of Drawings: LTS-CAC-SCG-3920-001Alhad PanwalkarNo ratings yet
- Plunge Col Progress SCG PrésentationDocument1 pagePlunge Col Progress SCG PrésentationAlhad PanwalkarNo ratings yet
- TTA 465 C0U 1102001 A Geotechnical Interpretative ReportDocument81 pagesTTA 465 C0U 1102001 A Geotechnical Interpretative ReportAlhad PanwalkarNo ratings yet
- Pile Progress CG PrésentationDocument1 pagePile Progress CG PrésentationAlhad PanwalkarNo ratings yet
- 2017-06-28 MMRC Presentation - Column Options-2017!06!28 - LatestDocument49 pages2017-06-28 MMRC Presentation - Column Options-2017!06!28 - LatestAlhad PanwalkarNo ratings yet
- Mumbai Metro Rail Project Line - 3 Colaba-Bandra-SeepzDocument1 pageMumbai Metro Rail Project Line - 3 Colaba-Bandra-SeepzAlhad PanwalkarNo ratings yet
- Pile Progress CG PrésentationDocument1 pagePile Progress CG PrésentationAlhad PanwalkarNo ratings yet
- LTS Geo SCG 17 2301 ADocument135 pagesLTS Geo SCG 17 2301 AAlhad PanwalkarNo ratings yet
- Geological Profile With GridsDocument1 pageGeological Profile With GridsAlhad PanwalkarNo ratings yet
- Cuffe Parade Cuffe Parade: UGC-01-GEO-SCP-1101-002Document1 pageCuffe Parade Cuffe Parade: UGC-01-GEO-SCP-1101-002Alhad PanwalkarNo ratings yet
- Geological Profile With Grid No SCGDocument1 pageGeological Profile With Grid No SCGAlhad PanwalkarNo ratings yet
- BOQ Hutatma Chowk Secant Pile R1Document1 pageBOQ Hutatma Chowk Secant Pile R1Alhad PanwalkarNo ratings yet
- Ugc 01 Geo SCP 1100 001 ADocument1 pageUgc 01 Geo SCP 1100 001 AAlhad PanwalkarNo ratings yet
- SCG - Strut Forces SummaryDocument25 pagesSCG - Strut Forces SummaryAlhad PanwalkarNo ratings yet
- Ugc 01 Geo SCP 1100 002 ADocument1 pageUgc 01 Geo SCP 1100 002 AAlhad PanwalkarNo ratings yet
- UGC-01-GEO-SCP-1101-001: Cuffe Parade Station Anticipated Settlement Contour PlanDocument1 pageUGC-01-GEO-SCP-1101-001: Cuffe Parade Station Anticipated Settlement Contour PlanAlhad PanwalkarNo ratings yet
- SCG - Soldier Pile - Sketch 1Document1 pageSCG - Soldier Pile - Sketch 1Alhad PanwalkarNo ratings yet
- LTS Cac SCG 3902 001 B PDFDocument1 pageLTS Cac SCG 3902 001 B PDFAlhad PanwalkarNo ratings yet
- Soal Tes TOEFLDocument8 pagesSoal Tes TOEFLBerkat BuuloloNo ratings yet
- Sociolinguistics V-C "The Differences in Using Language To Text Short Message Service (SMS) Related To The Age"Document8 pagesSociolinguistics V-C "The Differences in Using Language To Text Short Message Service (SMS) Related To The Age"Awanda NoviaNo ratings yet
- BBRC 4103 Research MethodologyDocument11 pagesBBRC 4103 Research MethodologyJamuna Rani100% (1)
- William Labov and The Social Stratification of RDocument3 pagesWilliam Labov and The Social Stratification of RSamaraNo ratings yet
- Language and Political EconomyDocument24 pagesLanguage and Political EconomygrishasNo ratings yet
- Deceptive Brain: What Our Brain Tells About Us Untrue: by Keneth Joe A. CabungcalDocument2 pagesDeceptive Brain: What Our Brain Tells About Us Untrue: by Keneth Joe A. CabungcalKeneth Joe CabungcalNo ratings yet
- Distinguish Between IRS and DBMS and DMDocument3 pagesDistinguish Between IRS and DBMS and DMprashanth_17883100% (2)
- Introduction To Algorithm & Flowchart - L1Document20 pagesIntroduction To Algorithm & Flowchart - L1April VasquezNo ratings yet
- Learners With Difficulty in Basic Learning and Applying Knowledge Grade 6 and SHSDocument74 pagesLearners With Difficulty in Basic Learning and Applying Knowledge Grade 6 and SHSChristian AguirreNo ratings yet
- The MIT Press Fall 2009 Announcement CatalogDocument108 pagesThe MIT Press Fall 2009 Announcement CatalogThe MIT Press100% (20)
- 10th 2nd Lang Eng 1Document31 pages10th 2nd Lang Eng 1Pubg KeliyeNo ratings yet
- English For Writing Research Paper: Abstract and IntroductionDocument15 pagesEnglish For Writing Research Paper: Abstract and IntroductionMark Alvin OcampoNo ratings yet
- Effects of Teachers Personality Traits On EFL Learners Foreign Language EnjoymentDocument15 pagesEffects of Teachers Personality Traits On EFL Learners Foreign Language EnjoymentAndry YasnoNo ratings yet
- CBR Fitrah Insani PGMI 3Document4 pagesCBR Fitrah Insani PGMI 3Fitrah InsaniNo ratings yet
- 6 Project Report Sem6Document13 pages6 Project Report Sem6Chetan SehgalNo ratings yet
- Divine Word College of Laoag Requirement FormatDocument5 pagesDivine Word College of Laoag Requirement FormatCaparispisan PagudpudNo ratings yet
- Dr. Tina Christie: EvaluationDocument28 pagesDr. Tina Christie: EvaluationharrindlNo ratings yet
- Final Project Allison LybargerDocument9 pagesFinal Project Allison Lybargerapi-252180806No ratings yet
- Guidelines in The For School YEAR 2021-2022: Implementation of Flexible Reading ProgramsDocument94 pagesGuidelines in The For School YEAR 2021-2022: Implementation of Flexible Reading ProgramsMarhonKarlCabildoNo ratings yet
- 1 Inversion Grammar RulesDocument4 pages1 Inversion Grammar RulesErnesto De La ValleNo ratings yet
- Overview of Jesuit EducationDocument13 pagesOverview of Jesuit EducationShaira MarieNo ratings yet
- Test Bank For Essentials of Human Behavior Integrating Person Environment and The Life Course Second EditionDocument11 pagesTest Bank For Essentials of Human Behavior Integrating Person Environment and The Life Course Second Editionbevisphuonglc1u5No ratings yet
- 2012 Kim Y. Development and Application of STEAM Teaching Model Based On The Rube Goldberg S InventionDocument6 pages2012 Kim Y. Development and Application of STEAM Teaching Model Based On The Rube Goldberg S InventionJose Gallardo ANo ratings yet