You might also like
- Ejercicios de Grafcet PDFDocument69 pagesEjercicios de Grafcet PDFdizzelmx83% (6)
- Ejercicios Grafcet 1Document9 pagesEjercicios Grafcet 1fragaenrique75% (4)
- Ejercicios de PLCDocument25 pagesEjercicios de PLCCarolina Solis0% (2)
- Ejercicios Resueltos GrafcetDocument3 pagesEjercicios Resueltos GrafcetLaura Mayara Proenza GonzálezNo ratings yet
- Problemas GrafcetDocument9 pagesProblemas GrafcetShara CruzNo ratings yet
- Grafcet Teoria y EjemplosDocument46 pagesGrafcet Teoria y EjemplosMiguel Esquit50% (2)
- Ejercicios Resueltos GrafcetDocument13 pagesEjercicios Resueltos GrafcetCarlosNo ratings yet
- Ejercicios GrafcetDocument4 pagesEjercicios GrafcetRonald Eder Chavez Palomino100% (2)
- Ejercicios Resueltos Grafcet PDFDocument3 pagesEjercicios Resueltos Grafcet PDFLaura Mayara Proenza GonzálezNo ratings yet
- Curso de GrafcetDocument66 pagesCurso de Grafcetvicasazn100% (2)
- EjerciciosS7 200Document7 pagesEjerciciosS7 200el_peruanoNo ratings yet
- Tema5 Ejercicios GrafcetDocument32 pagesTema5 Ejercicios GrafcetKoko EsclntNo ratings yet
- Practica. Detección y Expulsión de Botellas Sin TaponDocument3 pagesPractica. Detección y Expulsión de Botellas Sin TaponPatriciaBlázquezGarcíaNo ratings yet
- Ejercicio Resuelto Método GrafcetDocument6 pagesEjercicio Resuelto Método Grafcetj luis VillegasNo ratings yet
- Ejemplo Guía GEMMADocument14 pagesEjemplo Guía GEMMAJordi PG100% (5)
- Proyectos de Automatizacic3b3n para Cpu s7 1200Document21 pagesProyectos de Automatizacic3b3n para Cpu s7 1200Javier RubioNo ratings yet
- Ejercicios PLC ClaveDocument15 pagesEjercicios PLC ClaveLizardo Meneses Rojas100% (1)
- Ejerciicios de PLCDocument18 pagesEjerciicios de PLCmyst3ryon100% (2)
- Ejercicios para LadderDocument10 pagesEjercicios para LadderSilvio AguilarNo ratings yet
- Problemas de PLCDocument8 pagesProblemas de PLCMelissa100% (2)
- Ejercicios de Grafcet - AdaptadosDocument54 pagesEjercicios de Grafcet - AdaptadosAsier Sabin De Ormaetxea Garaizar100% (1)
- Práctica. Planta de ReposteríaDocument11 pagesPráctica. Planta de ReposteríaPatriciaBlázquezGarcía100% (2)
- Ejercicios de Sistemas SecuencialesDocument116 pagesEjercicios de Sistemas Secuencialesginerggg92% (25)
- El GRAFCET, Practicas y AplicacionesDocument190 pagesEl GRAFCET, Practicas y AplicacionesEndrik Peluffo100% (3)
- Automatización electroneumática Métodos sistemáticos: Álgebra de Boole, cascada, paso a pasoFrom EverandAutomatización electroneumática Métodos sistemáticos: Álgebra de Boole, cascada, paso a pasoNo ratings yet
- InfoPLC Net Ejercicios AutomatismosDocument15 pagesInfoPLC Net Ejercicios AutomatismosFernando de pedroNo ratings yet
- Ejercicio 2Document5 pagesEjercicio 2Anonymous VC5mhPT2G100% (1)
- Ejercicio 2Document5 pagesEjercicio 2Chris SeguraNo ratings yet
- Problema 0401Document6 pagesProblema 0401rgmaguila1533No ratings yet
- Automatism oDocument15 pagesAutomatism oUrielv OsNo ratings yet
- 2022-06-03 - Flip-Flop R-SDocument4 pages2022-06-03 - Flip-Flop R-Scarlos orregoNo ratings yet
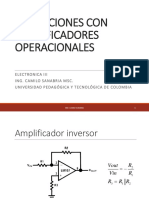
- 5-Aplicaciones Con Amplificadores OperacionalesDocument23 pages5-Aplicaciones Con Amplificadores OperacionalesJuan CastilloNo ratings yet
- FLIP Flops PDFDocument15 pagesFLIP Flops PDFSerafinNo ratings yet
- Linea SinDocument24 pagesLinea SinGabriel Andres ValenciaNo ratings yet
- Hoja de Estacado SolariumDocument2 pagesHoja de Estacado SolariumOmr Scrch100% (1)
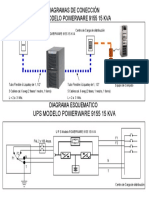
- Diagrama Powerware 9155 15 KvaDocument1 pageDiagrama Powerware 9155 15 KvaSALVADORNo ratings yet
- 2 Alimentadores y Circ DerivadosDocument14 pages2 Alimentadores y Circ DerivadosAlexis B JmnezNo ratings yet
- Tss-Instalacion de PDB - MalaDocument10 pagesTss-Instalacion de PDB - MalaMiguel VasNo ratings yet
- Proceso Floculante 02Document1 pageProceso Floculante 02Camilo Jimenez GNo ratings yet
- 1lpe455084pr - EeDocument12 pages1lpe455084pr - EeHenry CordovaNo ratings yet
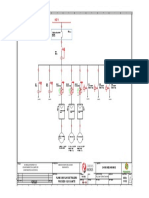
- Diagrama Galaxy 10-15Document1 pageDiagrama Galaxy 10-15SALVADORNo ratings yet
- Listado de Planos de ArquitecturaDocument2 pagesListado de Planos de ArquitecturaMartin MendozaNo ratings yet
- Manual SFR EspanolDocument252 pagesManual SFR Espanolcristian100% (2)
- Preinforme 2 de Comunicaciones-2Document10 pagesPreinforme 2 de Comunicaciones-2Edgardiel AzuajeNo ratings yet
- Cuadro CocaDocument13 pagesCuadro CocaJavier Robledo HerreraNo ratings yet
- Data de Estado de Grupos Electrogenos La LibertadDocument4 pagesData de Estado de Grupos Electrogenos La LibertadHans aavNo ratings yet
- Manual Manipulador Mt1435slDocument232 pagesManual Manipulador Mt1435slmonica100% (2)
- PLIOP-005 Izamiento Torre e Instalacion Vientos V1Document17 pagesPLIOP-005 Izamiento Torre e Instalacion Vientos V1Thomas PinzonNo ratings yet
- Valentina TareaDocument2 pagesValentina TareaDulce V VillaNo ratings yet
- Tema 4 Flip-Flops 2009Document70 pagesTema 4 Flip-Flops 2009josue charccahuanaNo ratings yet
- Hafei Lobo Service Manual PDF - Compressed-1 64Document1 pageHafei Lobo Service Manual PDF - Compressed-1 64Ty ToyNo ratings yet
- Lab 4 DemodulacionDocument13 pagesLab 4 DemodulacionLUIS ALBERTO CUPA HANCCONo ratings yet
- Bomba Diesel EpicDocument30 pagesBomba Diesel EpicDani-meganeboy80% (5)
- Protocolos RS PDFDocument1 pageProtocolos RS PDFCesar Huayllapuma RamirezNo ratings yet
- Flip Flop JKDocument43 pagesFlip Flop JKlugtzNo ratings yet
- Carta AlcocerDocument1 pageCarta AlcocerEm GomezNo ratings yet
- CENIA (Manual de Averias en Maniobras de Reles - C-80 - C-87 - Serie-F) - OCRDocument34 pagesCENIA (Manual de Averias en Maniobras de Reles - C-80 - C-87 - Serie-F) - OCRNandoNo ratings yet
- L6 Motores Paso A PasoDocument6 pagesL6 Motores Paso A PasoImportaciones RealesNo ratings yet
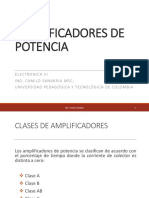
- 1-Amplificadores de PotenciaDocument40 pages1-Amplificadores de PotenciaJuan CastilloNo ratings yet
- Contabilidad Informática SEMANA 3 PPT UTP PG 2021Document52 pagesContabilidad Informática SEMANA 3 PPT UTP PG 2021Andres Felipe Davila VargasNo ratings yet
- Aa2. CostosDocument4 pagesAa2. CostosvictoriaNo ratings yet
- PAEP Ingeniería de Mantenimiento y ConfiabilidadDocument22 pagesPAEP Ingeniería de Mantenimiento y ConfiabilidadDarwin UribeNo ratings yet
- Diseño y Simulacion de Un Sistema de Sostenimiento-Examen IDocument36 pagesDiseño y Simulacion de Un Sistema de Sostenimiento-Examen IJavier Lopez RodriguezNo ratings yet
- Experiencia de ReynoldsDocument4 pagesExperiencia de ReynoldsMiguel Alexander Palmer LozadaNo ratings yet
- Semiconductores de PotenciaDocument19 pagesSemiconductores de PotenciaFreddy NambunaNo ratings yet
- Catálogo de Conductores Eléctricos.Document4 pagesCatálogo de Conductores Eléctricos.Xavi X QunqiNo ratings yet
- Manual Operador Mcare EspañolDocument138 pagesManual Operador Mcare EspañolJose Juan Sobampo Rocha50% (2)
- Mapa y Facies MetamórficasDocument3 pagesMapa y Facies MetamórficasLuis VelderrainNo ratings yet
- Términos de Referencia de CapacitaciónDocument5 pagesTérminos de Referencia de CapacitaciónMarkPairaNo ratings yet
- Ejemplo Planteamiento de La InvestigaciónDocument4 pagesEjemplo Planteamiento de La InvestigaciónHUGO ORLANDO HUAMAN MUÑOZNo ratings yet
- Plan Haccp en El Sector Frutas y HortalizasDocument50 pagesPlan Haccp en El Sector Frutas y HortalizasCALIDAD SOLIDA - RUC 20606275570No ratings yet
- s500 LincolnDocument47 pagess500 Lincolnjorge varNo ratings yet
- Nuevo Formato Informe SindicatoDocument2 pagesNuevo Formato Informe SindicatoJOHN ALEXANDER CALDERON ORTIZNo ratings yet
- Encuesta 2Document5 pagesEncuesta 2Franze André Pandal PiélagoNo ratings yet
- Glosario de Isolineas MeteorologicasDocument5 pagesGlosario de Isolineas MeteorologicasAndreNo ratings yet
- Foro de Análisis Discusión Caso Gabriel de VenezuelaDocument7 pagesForo de Análisis Discusión Caso Gabriel de VenezuelasamueljaimesdoctoradoNo ratings yet
- Estrategia de MarcaDocument12 pagesEstrategia de MarcaJorge AurrecocheaNo ratings yet
- Manual LSMWDocument32 pagesManual LSMWJuan Francisco Herrera100% (1)
- Taller IetiDocument8 pagesTaller IetiAndrés David VásquezNo ratings yet
- Caso de EstudioDocument10 pagesCaso de EstudioAdriana SalazarNo ratings yet
- Metodo de Los Dos VatimetrosDocument12 pagesMetodo de Los Dos VatimetrosNelly HerreraNo ratings yet
- Corre AsDocument11 pagesCorre AsPepe Perez PedrazasNo ratings yet
- Torres de Enfriamiento .Reporte No. 06Document12 pagesTorres de Enfriamiento .Reporte No. 06Jar RSNo ratings yet
- Caso #01: Alteraciones PosturalesDocument3 pagesCaso #01: Alteraciones PosturalesMaju Ivonne FloresNo ratings yet
- Manual Civil 3D 2010 - Diseã o Vial I - UnfvDocument80 pagesManual Civil 3D 2010 - Diseã o Vial I - UnfvJuan Carlos Sanchez ParedesNo ratings yet
- Pronóstico Hidrológico Senamhi Miércoles 07-12-2022Document39 pagesPronóstico Hidrológico Senamhi Miércoles 07-12-2022pabloNo ratings yet
- Constitución Política Del Perú de 1979Document47 pagesConstitución Política Del Perú de 1979Guillermo Hector PascualNo ratings yet
- Cuarzo PanDocument101 pagesCuarzo PanPau OlazabalNo ratings yet
- Gusto Oriental S.A.Document63 pagesGusto Oriental S.A.Enrique RosalesNo ratings yet