Professional Documents
Culture Documents
Eletricista Forc3a7a e Controle1 PDF
Uploaded by
Giovanni LuigiOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Eletricista Forc3a7a e Controle1 PDF
Uploaded by
Giovanni LuigiCopyright:
Available Formats
ELETRICISTA
FORA E
CONTROLE
COMANDOS DE MOTORES
1
COMANDOS DE MOTORES
2
PETROBRAS Petrleo Brasileiro S.A.
Todos os direitos reservados e protegidos pela Lei 9.610, de 19.2.1998.
proibida a reproduo total ou parcial, por quaisquer meios, bem como a produo de apostilas, sem
autorizao prvia, por escrito, da Petrleo Brasileiro S.A. PETROBRAS.
Direitos exclusivos da PETROBRAS Petrleo Brasileiro S.A.
CORRA, Carlos Jesus Anghinoni e DUTRA FILHO, Getlio Delano
Comandos de Motores / CEFET-RS. Pelotas, 2008.
131P.:118il.
PETROBRAS Petrleo Brasileiro S.A.
Av. Almirante Barroso, 81 17 andar Centro
CEP: 20030-003 Rio de Janeiro RJ Brasil
3
NDICE
UNIDADE I ............................................................................................................................................ 11
1.1 - Ligao de motores de induo monofsico (MIM).................................................................. 11
1.1.1 Exemplos de ligaes para o MIM....................................................................................... 12
1.1.2 Procedimento para identificao das bobinas de um MIM .................................................. 15
1.2 - Ligao dos motores de induo trifsico (MIT)........................................................................ 16
1.2.1 - Ligao de Motores de Induo Trifasico com 6 Terminais............................................... 17
1.2.2 - LIGAO DE MOTORES DE INDUO TRIFSICO COM 9 TERMINAIS..................... 21
1.2.3 - Ligao de Motores de Induo Trifsico com 12 Terminais............................................. 24
1.2.4 - Motores com Duas ou Mais Velocidades........................................................................... 27
UNIDADE II ............................................................................................................................................ 30
UNIDADE III ........................................................................................................................................... 32
3.1 Exemplo de esquema de fora de uma chave de partida direta simples no modo unifilar e no
modo multifilar. ................................................................................................................................... 33
3.1.1 Modo Multifilar ...................................................................................................................... 33
3.1.2 Modo Unifilar......................................................................................................................... 34
UNIDADE IV........................................................................................................................................... 35
UNIDADE V ........................................................................................................................................... 36
UNIDADE VI ........................................................................................................................................... 38
6.1 - Funo de um Dispositivo de Partida........................................................................................ 39
6.2 -Composio de um Dispositivo de Partida................................................................................. 40
6.2.1 Definies das coordenadas de proteo - IEC 60 947-4 ................................................... 41
6.3 - Glossrio.................................................................................................................................... 42
6.4 - Chave de Partida Direta Simples............................................................................................... 44
6.4.1 Esquema de fora da chave de partida direta no modo multifilar e no modo unifilar .......... 46
6.4.2 Esquema de comando da chave de partida direta respectivamente aos esquemas de fora
acima ............................................................................................................................................. 47
6.5 Chave de partida direta simples com reverso ........................................................................... 48
6.5.1 Esquema de fora da chave de partida direta com reverso no modo multifilar e no modo
unifilar ............................................................................................................................................ 49
6.5.2 Esquema de comando da chave de partida direta com reverso........................................ 50
6.6 - Chave de partida indireta estrela tringulo (yd).................................................................... 51
6.6.1 Esquema de fora da chave de partida y d automtica no modo multifilar e no modo
unifilar ............................................................................................................................................ 55
4
6.6.2 Esquema de comando da chave de partida y d automtica ............................................. 56
6.6.3 Esquema de fora da chave de partida y d automtica com reverso no modo multifilar 57
6.6.4 Esquema de comando da chave de partida y d automtica com reverso ...................... 58
6.7 - Chave de partida indireta autocompensadora ou compensadora............................................. 59
6.7.1 Exemplo dos valores de tenso das derivaes de um autotranformador .......................... 60
6.7.2 Esquemas de ligao dos enrolamentos ............................................................................. 61
6.7.3 Demonstrao dos clculos com derivao de 65%............................................................ 61
6.7.4 Exemplo da chave de partida autocompensadora, no modo unifilar, com os valores de
corrente por ramo do circuito, conforme derivao do autotransformador. .................................. 62
6.7.5 Esquema de fora da chave de partida autocompensadora automtica no modo multifilar e
no modo unifilar ............................................................................................................................. 63
6.7.6 Esquema de comando da chave de partida autocompensadora automtica...................... 64
6.8 - Chave de Partida Semi - Automtica ........................................................................................ 66
6.9 - Chave de Partida Automtica.................................................................................................... 67
UNIDADE VII .......................................................................................................................................... 69
7.1 Funcionamento ............................................................................................................................ 70
7.2 - Conexes Eltricas.................................................................................................................... 71
UNIDADE VIII ......................................................................................................................................... 72
8.1 - Chave de partida soft-starter / stop ........................................................................................... 72
8.1.1 - Princpio de Funcionamento............................................................................................... 72
8.1.2 - Tipos de Soft Starter ....................................................................................................... 78
8.1.3 - Parametrizao do soft starter ........................................................................................ 82
8.1.4 - Aplicaes e ligaes feitas com a soft starter ............................................................... 86
8.2 - Inversor de freqncia............................................................................................................... 91
8.2.1 - Princpio de funcionamento do inversor de freqncia...................................................... 92
8.2.2 Tipos de inversor de freqncia ...................................................................................... 104
8.2.3 - Aplicaes e ligaes feitas com o inversor de freqncia ............................................. 106
8.2.4 - Controle de velocidade de um motor trifsico alimentado por um inversor de freqncia
..................................................................................................................................................... 108
8.2.5 - Parametrizao do inversor de freqncia ...................................................................... 114
UNIDADE IX ........................................................................................................................................ 116
9.1 O Socorro s Vtimas................................................................................................................. 117
9.2 - Dispositivos DR........................................................................................................................ 118
9.2.1 Proteo complementar contra contatos diretos: ............................................................... 118
9.2.2 Funo Dispositivos DR ..................................................................................................... 118
9.2.3 Princpio de Funcionamento............................................................................................... 119
9.2.4 Tipos de DRs ..................................................................................................................... 121
9.2.5 Mdulo DR.......................................................................................................................... 122
5
9.2.4 Aplicao ............................................................................................................................ 122
9.2.5 Principais Caractersticas para Selecionar DR .................................................................. 122
9.3 Interruptor Diferencial ................................................................................................................ 123
9.4 Disjuntor Diferencial Seletivo..................................................................................................... 124
9.5 Ligao dos Dispositivos de Proteo por Corrente Residual .................................................. 125
9.6 Boto de Teste........................................................................................................................... 126
9.7 Montagem dos Dispositivos DRs em Quadros de Distribuio ................................................ 127
UNIDADE X ......................................................................................................................................... 128
BIBLIOGRAFIA..................................................................................................................................... 130
6
LISTA DE FIGURAS
Figura 1.1 Representao das bobinas de um motor de induo monofsico com bobina auxiliar de
partida..................................................................................................................................................... 12
Figura 1.2 - Associao das bobinas em paralelo ................................................................................. 12
Figura 1.3 - Inverso do sentido de rotao .......................................................................................... 13
Figura 1.4 - Associao das bobinas em paralelo ................................................................................. 13
Figura 1.5 Associao em srie das bobinas de trabalho ..................................................................... 14
Figura 1.6 - Inverso do sentido de rotao .......................................................................................... 14
Figura 1.7 Representao das bobinas de um motor de induo trifsico com seis terminais............. 17
Figura 1.8 Bobinas de um motor trifsico .............................................................................................. 17
Figura 1.9 Representaes da ligao tringulo................................................................................. 18
Figura 1.10 Representaes da ligao tringulo (continuao)........................................................ 18
Figura 1.11 Representaes da ligao estrela.................................................................................. 19
Figura 1.12 Representaes da ligao estrela (continuao)........................................................... 19
Figura 1.13 Representao das bobinas de um motor de induo trifsico com nove terminais ......... 21
Figura 1.14 - Tringulo Srie.................................................................................................................. 22
Figura 1.15 - Tringulo Paralelo............................................................................................................. 22
Figura 1.16 - Estrela Srie ..................................................................................................................... 23
Figura 1.17 - Estrela Paralelo................................................................................................................. 23
Figura 1.18 Representao das bobinas de um motor de induo trifsico com doze terminais ......... 24
Figura 1.19 - Tringulo Paralelo............................................................................................................. 25
Figura 1.20 - Estrela Paralelo................................................................................................................. 25
Figura 1.21 - Tringulo Paralelo............................................................................................................. 26
Figura 1.22 - Estrela Paralelo................................................................................................................. 26
Figura 1.23 - Motor com 4 plos considerando 2 bobinas de umas das fases. .................................... 28
Figura 1.24 Inverso do sentido da corrente num motor dahlander para mudana do nmero de plos
................................................................................................................................................................ 28
Figura 1.25 - Tipos de ligao para motores dahlander ........................................................................ 29
Figura 2.1 - Motor de induo trifsico................................................................................................... 30
Figura 2.2 - Motor de induo trifsico (continuao)............................................................................ 31
Figura 3.1 - Esquema de fora de uma chave de partida direta simples no modo multifilar ................. 33
Figura 3.2 - Esquema de fora de uma chave de partida direta simples no modo unifilar.................... 34
Figura 4.1 Exemplos de comando manuais simples de um MIM e de MIT ........................................... 35
Figura 5.1 Exemplo de uma chave de partida manual autocompensadora........................................... 36
7
Figura 5.2 Exemplo de uma chave de partida manual y - d .................................................................. 37
Figura 6.1 Composio mnima para uma chave de partida ................................................................. 39
Figura 6.2 Comportamento da corrente e conjugado de um motor partindo a plena tenso ................ 45
Figura 6.3 - Esquema de fora da chave de partida direta no modo multifilar e no modo unifilar ........ 46
Figura 6.4 Esquema de comando da chave de partida direta respectivamente aos esquemas de fora
acima...................................................................................................................................................... 47
Figura 6.5 - Esquema de fora da chave de partida direta com reverso no modo multifilar e no modo
unifilar ..................................................................................................................................................... 49
Figura 6.6 - Esquema de comando da chave de partida direta com reverso...................................... 50
Figura 6.7 - Esquema de ligao dos enrolamentos.............................................................................. 53
Figura 6.8 - Comportamento da corrente e conjugado de um motor partindo com uma chave de tenso
indireta Y D.......................................................................................................................................... 54
Figura 6.9 - Esquema de fora da chave de partida y d automtica no modo multifilar e no modo
unifilar ..................................................................................................................................................... 55
Figura 6.10 - Esquema de comando da chave de partida y d automtica ......................................... 56
Figura 6.11 - Esquema de fora da chave de partida y d automtica com reverso no modo multifilar
................................................................................................................................................................ 57
Figura 6.12 - Esquema de comando da chave de partida y d automtica com reverso................... 58
Figura 6.13 - Representao das bobinas de um autotransformador ligado em estrela....................... 59
Figura 6.14 - Valores de tenso de fase e de linha em um autotransformador ligado em Y ................ 60
Figura 6.15 - Esquemas de ligao dos enrolamentos.......................................................................... 61
Figura 6.16 - Exemplo da chave de partida autocompensadora ........................................................... 62
Figura 6.17 - Esquema de fora da chave de partida autocompensadora automtica no modo multifilar
e no modo unifilar ................................................................................................................................... 63
Figura 6.18 - Esquema de comando da chave de partida autocompensadora automtica .................. 64
Figura 6.19 - Chave de Partida Semi - Automtica................................................................................ 66
Figura 6.20 - Chave de Partida Automtica........................................................................................... 67
Figura 6.21 - chave de partida puramente automtica .......................................................................... 68
Figura 7.1 - Funcionamento ................................................................................................................... 70
Figura 7.2 - Conexes Eltricas............................................................................................................. 71
Figura 8.1 Tiristores SCRs ligados em anti - paralelo, sendo 2 por fase, controle nas trs fases ....... 73
Figura 8.2 - Acelerao......................................................................................................................... 74
Figura 8.3 Otimizao para carga parcial .............................................................................................. 74
Figura 8.4 - Desacelerao.................................................................................................................... 75
Figura 8.5 - Grfico ................................................................................................................................ 75
Figura 8.6 Grfico 2............................................................................................................................. 76
Figura 8.7 - Partida direta....................................................................................................................... 77
Figura 8.8 - Partida estrela - tringulo.................................................................................................... 77
8
Figura 8.9 - Partida suave soft - starter.................................................................................................. 77
Figura 8.10 - Soft starter com controle em apenas uma fase............................................................. 78
Figura 8.11 - Soft starter com controle em duas fases, com rel de by-pass e bimetlico contra
sobrecarga.............................................................................................................................................. 79
Figura 8.12 - Soft Starter com duas fases semi - controladas............................................................ 80
Figura 8.13 - Soft starter com controle em trs fases, com rel de by pass e bimetlico contra
sobrecargas............................................................................................................................................ 81
Figura 8.14 - Parametrizao via potnciometros ................................................................................. 82
Figura 8.15 - Parametrizao da soft starter via potencimetros ....................................................... 83
Figura 8.16 - Parametrizao da soft starter via software dedicado................................................... 84
Figura 8.17 - Parametrizao da soft starter via IHM......................................................................... 85
Figura 8.18 - Soft Starter Partindo um nico motor ............................................................................ 86
Figura 8.19 - Starter Partindo Vrios Motores simultaneamente........................................................... 87
Figura 8.20 - Starter Partindo Vrios Motores em Seqncia ou Cascata......................................... 88
Figura 8.21 - Partida em seqncia de 3 motores com apenas uma soft - starter................................ 89
Figura 8.22 - Soft starter montada dentro do delta da ligao de um motor ...................................... 90
Figura 8.23 - Blocodiagrama de um inversor de freqncia.................................................................. 93
Figura 8.24 - Princpio de funcionamento do inversor de freqncia simplificada ................................ 95
Figura 8.25 Etapa de Retificao........................................................................................................ 95
Figura 8.26 - Etapa retificao completa ............................................................................................... 96
Figura 8.27 - Etapa ps retificao ou filtragem .................................................................................... 96
Figura 8.28 - Inversor Tradicional. ......................................................................................................... 97
Figura 8.29 - Inversor para tenso constante ou varivel e a sada que depende da freqncia de
chaveamento dos transistores. .............................................................................................................. 98
Figura 8.30 - Modulao por amplitude e por largura de pulso. ............................................................ 98
Figura 8.31 - Torque e sobre-torque do motor..................................................................................... 100
Figura 8.32 - Performance do motor .................................................................................................... 100
Figura 8.33 - Princpio de funcionamento do pwm............................................................................... 101
Figura 8.34 - Princpio de funcionamento do pwm senoidal ................................................................ 101
Figura 8.35 - Forma de onda da tenso e corrente gerada por controle por pwm analisando uma fase
.............................................................................................................................................................. 102
Figura 8.36 - Forma de onda da tenso e corrente gerada por controle por pwm analisando trs fases
.............................................................................................................................................................. 102
Figura 8.37 - Caractersticas dos conversores de freqncia pwm..................................................... 103
Figura 8.38 - Inversores com alimentao mono ou bifsica e sada trifsica.................................... 105
Figura 8.39 - Inversores com alimentao trifsica e sada trifsica................................................... 105
Figura 8.40 - Ligao da fora num inversor de freqncia com alimentao mono ou bifsica........ 106
9
Figura 8.41 - Ligao das entradas e sadas digitais, ligao das entradas analgicas, suas funes e
caractersticas ...................................................................................................................................... 107
Figura 8.42 - Exemplo de ligao do comando num inversor de freqncia....................................... 107
Figura 8.43 - Controle em malha aberta da velocidade de um motor CA............................................ 110
Figura 8.44 - Controle de velocidade de um motor ca em malha aberta (sensorless) ........................ 111
Figura 8.45 - Modo do controle de velocidade em malha aberta Controle Vetorial............................. 111
Figura 8.46 - Controle em malha fechada da velocidade de um motor CA......................................... 112
Figura 8.47 - Controle de velocidade de um motor ca em malha fechada (encoder).......................... 113
Figura 8.48 - Inversor de freqncia com realimentao de velocidade proporcionada atravs do sinal
gerado pelo encoder, e com sinal de posicionamento gerado por um resolver .................................. 113
Figura 8.49 - Parametrizao do inversor de freqncia via IHM........................................................ 114
Figura 8.50 - Parametrizao do inversor via IHM............................................................................... 115
Figura 9.1 Tipos de Contato.............................................................................................................. 116
Figura 9.2 - Efeito fisiolgico da corrente no corpo humano. .............................................................. 117
Figura 9.3 Dispositivos DR................................................................................................................... 119
Figura 9.4 Corrente diferencial-residual ............................................................................................... 119
Figura 9.5 Corrente de Fuga ocasionado por Falha de Isolao do Equipamento Contato Indireto120
Figura 9.6 Princpio de Funcionamento dos DRs................................................................................ 120
Figura 9.7 Interruptor Diferencial.......................................................................................................... 123
Figura 9.8 Disjuntor Diferencial Seletivo.............................................................................................. 124
Figura 9.9 Como Ligar no Esquema TN .............................................................................................. 125
Figura 9.10 Como Ligar no Esquema TT............................................................................................. 125
Figura 9.11 Funcionamento de um Boto de Teste de um DDR......................................................... 126
Figura 9.12 Quadro Metlico................................................................................................................ 127
Figura 9.13 Quadro Plstico................................................................................................................. 127
10
INTRODUO
Em todo setor industrial, do mais simples ao mais complexo sistema produtivo, h algum tipo de
mquina ou equipamento sendo acionado por motor, no qual o motor eltrico o mais largamente
utilizado. Para que esses motores venham a desempenhar de maneira satisfatria o seu papel no
processo produtivo, ou seja, colocar alguma mquina e/ou em movimento, deve-se assegurar que o
mesmo ir funcionar de modo eficaz e principalmente seguro, tanto no que diz respeito mquina
em si como para as pessoas que por ventura possam estar diretamente ou indiretamente envolvidas
na operao do equipamento.
Os motores eltricos so acionados (energizados) atravs de chaves de partida. As chaves de
partida podem ser do tipo manual h interveno direta do operador na comutao dos contatos da
chave, atravs de acionamento por esforo mecnico em uma manopla ou alavanca comutadora,
como por exemplo, a chave tripolar tipo faca, chave de partida direta reversora manual, chave Y-D
manual e a chave compensadora manual; do tipo eletromagnticas quando usados contatores para
estabelecer ou interromper a energia de alimentao do motor h interveno indireta ou inexiste
interveno por parte do operador na comutao dos contatos da chave de partida. As chaves de
partida eletromagnticas com o uso do contator podem ser acionadas por comando tipo semi-
automtico o operador deve acionar uma botoeira para que, conforme a lgica de funcionamento do
esquema eltrico do equipamento seja acionado o motor; do tipo automtica quando o comando do
contator feito diretamente atravs de dispositivos analgicos como termostatos, chaves de nvel,
pressostatos, existncia de tenso, temporizadores, etc; ou ainda associados a uma lgica de
funcionamento de um processo controlado por uma programao feita num PLC.
As chaves de partida manuais esto sendo cada vez mais substitudas por chaves de partida
eletromagnticas por vrios motivos, entre eles: o fato do comando de acionamento do motor poder
ser feito a distncia, j que as chaves de partida manual so instaladas junto ao equipamento e no
possuir controle por instrumentao associada ao sistema; a segurana das chaves pelo fato das
chaves manuais terem um ndice de proteo muito baixo e por vezes inexistir (IP00), como em
algumas chaves tripolar do tipo faca ainda comercializadas , entre outros. As chaves de partida
manuais ainda tem uso, porm, est mais restrito a pequenos produtores agrcolas e/ou
agropecurios e a processos produtivos de baixa complexidade.
Neste captulo ser abordado as chaves de partida manuais, eletromagnticas convencionais,
como a chave de partida direta, direta reversora, chave de partida estrela tringulo e a
compensadora, e a chave de partida eletrnica em estado slido (soft-starter). O inversor de
freqncia no propriamente uma chave de partida, salvo raras aplicaes muito especficas, e
tambm ser abordado.
11
I LIGAO DE MOTORES ELTRICOS CA
O primeiro passo para dimensionar os dispositivos de uma chave de partida saber o tipo de
ligao a ser feito no motor. Conforme as caractersticas da placa do motor, e as caractersticas da
rede de alimentao, possvel determinar a ligao que ser executada entre as bobinas de um
motor e realizar o clculo da corrente nominal presumida que o motor consumir quando em
funcionamento em regime nominal.
1.1 - Ligao de motores de induo monofsico
(MIM)
O motor de induo monofsico largamente utilizado nos setores comerciais, residenciais e
rurais. A grande maioria dos consumidores de energia eltrica recebe alimentao de uma rede
eltrica a dois ou trs condutores, conforme a carga instalada, do tipo monofsica, fase e neutro
(220Vac ou 110Vac), em alguns casos bifsica, fase-fase (220Vac), ou com trs condutores, fase-
fase+neutro (220Vac e 110Vac). Muitos estabelecimentos comerciais utilizam os motores
monofsicos em sistemas de refrigerao, como em balces frigorficos; j no meio residencial e rural
mais comum os motores monofsicos movimentarem mquinas de lavar roupas, ventiladores,
pequenas mquinas de uso rural como serras, entre outros.
O motor monofsico mais utilizado o que utiliza uma bobina auxiliar de partida em srie com
um capacitor prprio para esse uso, em srie com um interruptor centrfugo, chamada de fase auxiliar
ou bobina auxiliar de partida. O motor constitudo por mais duas bobinas, chamadas de bobinas
principais ou bobinas de trabalho.
A bobina auxiliar somente percorrida por corrente eltrica na partida do motor, pois, quando o
motor atinge aproximadamente 85% do valor da sua rotao nominal, o interruptor, atravs da fora
centrfuga provocada pela rotao do rotor, faz com que o contato do interruptor abra, interrompendo
assim a corrente que circula sobre a bobina auxiliar.
A bobina auxiliar de partida ajuda o motor a entrar em funcionamento, sendo que sem o mesmo o
MIM no conseguiria partir, pois no h defasagem entre a tenso e a corrente aplicada sobre os
terminais do motor, como visto no captulo de fundamentos de eletromagnetismo e equipamentos
eltricos.
A defasagem entre a tenso e a corrente conseguida atravs do capacitor, auxiliando o motor a
obter um alto conjugado de partida.
12
Figura 1.1 Representao das bobinas de um motor de induo monofsico com bobina auxiliar de partida.
Como aqui no Brasil h redes de alimentao em baixa tenso com valores de tenso de
380/220 Vac e 220/127 ou 110 Vac, fica claro aqui que sendo o motor formado com duas bobinas de
trabalho, que so aquelas que ficam constantemente energizadas, as mesmas s poderiam ser
projetadas para um valor de tenso de 110 Vac. A aplicao dos MIM se faz para uso em pequenas
mquinas ou equipamentos, sendo na sua grande maioria potncias de at 5 CV. H o uso de
motores monofsicos de potncias maiores, normalmente at 12,5 CV, porm seu uso mais restrito
a instalaes em que se necessita a correo da potncia da carga instalada por fase.
1.1.1 Exemplos de ligaes para o MIM
1.1.1.1 Ligao do MIM para uma rede de alimentao sendo UL =
220 Vac.
Associao das bobinas em paralelo para uma rede alimentao de 110Vac entre fase e neutro
Figura 1.2 - Associao das bobinas em paralelo
13
Inverso do sentido de rotao
Para inverter a rotao de um MIM, se faz necessrio somente inverter a ligao da bobina
auxiliar em relao bobina de trabalho. (MIM ligado entre fase e neutro).
Figura 1.3 - Inverso do sentido de rotao
Caso o circuito alimentador seja bifsico, sendo a tenso entre fases de 220 VAC, tambm
possvel ligar o MIM. Basta associar as bobinas de trabalho em srie, para provocar uma queda de
tenso entre as mesmas, e a bobina auxiliar conectar em paralelo com a bobina principal 2-4, pois o
valor de tenso entre 2-4 de aproximadamente 110 Vac. (MIM ligado entre fases).
Figura 1.4 - Associao das bobinas em paralelo
14
1.1.1.2 Ligao do MIM para uma rede de alimentao sendo UL =
380 Vac
Associao em srie das bobinas de trabalho, sendo a bobina auxiliar ligada em paralelo com a
bobina 2-4. (MIM ligado entre fase e neutro)
Figura 1.5 Associao em srie das bobinas de trabalho
Inverso do sentido de rotao
Figura 1.6 - Inverso do sentido de rotao
15
A inverso do sentido de rotao ocorre devido inverso do sentido em que a corrente eltrica
percorre a bobina auxiliar, invertendo assim o campo magntico produzido por essa bobina, logo o
sentido da f.e.m. induzidas nas barras do rotor por essa bobina.
Clculo da Corrente Nominal do Motor de Induo Monofsico
Onde:
In (A): Corrente nominal em ampres;
P (cv): Potncia nominal em cavalo-vapor;
736 W/cv: equivalncia cavalo-vapor em watts;
Un: Tenso nominal aplicado aos terminais das bobinas do motor;
Cos PHI: fator de potncia do motor;
Rendimento: razo entre a potncia de sada (potncia mecnica na ponta do eixo do motor) e a
potncia de entrada (tenso e corrente disponibilizada aos terminais do motor).
1.1.2 Procedimento para identificao das bobinas de um MIM
Quando os terminais da bobina de um motor de induo monofsico no estiverem
identificados, deve-se fazer o seguinte procedimento para identificar os terminais da bobina. Tal
procedimento se faz necessrio para que no haja erro na ligao do motor.
a) Com o auxlio do ohmmetro deve-se medir a continuidade entre os condutores terminais das
bobinas do motor e numer-los conforme os nmeros que identificam o comeo e final da bobina. (1 e
3; 2 e 4; ou 5 e 6); nas bobinas principais h indicao de valor de resistncia constante, j a bobina
auxiliar pode ocorrer conforme descrito abaixo.
b) Para identificar a bobina auxiliar, devido ao capacitor, o ohmmetro pode indicar, dependendo
da posio das ponteiras do ohmmetro, um valor de resistncia infinita. Caso isso ocorra deve-se
inverter as ponteiras do ohmmetro e verificar o que ocorre. Se o ponteiro do ohmmetro deflexionar
at a indicao de resistncia nula (0 Ohms) e comear a deflexionar lentamente pra valores de
resistncia at indicar valor de resistncia infinita, significa que, alm de se tratar da bobina auxiliar, o
capacitor est em condies de uso. Caso o ponteiro do ohmmetro no deflexionar (valor de
resistncia infinita), significa que o capacitor est aberto, no h condies de uso; caso o ponteiro do
16
ohmmetro deflexionar e indicar valor de resistncia nula (0 Ohms), significa que o capacitor est em
curto-circuito, no h condies de uso.
c) Ligar o motor conforme a Un disponvel na rede; UL ou UF=Ub ligar em srie as bobinas
principais (a bobina auxiliar sempre ser ligada em paralelo em relao s bobinas principais). Uf=Ub
ligar as bobinas em paralelo. (1 tentativa)
d) Caso o motor partir com rudo anormal deve-se desenergizar imediatamente o motor e inverter
a numerao do 2 pelo 4 ou do 1 pelo 3 e ligar o motor novamente. (2 tentativa). Feito esse ltimo
procedimento o motor ira partir normalmente.
Observao: a falta do capacitor no impede o acionamento do motor. Quando ocorre um defeito
no capacitor, o motor no ira partir, porm, basta um auxlio manual no eixo do mesmo que o motor
ira entrar em funcionamento. A falha do interruptor centrfugo, pode ser resolvida instalando um
interruptor comum tipo campainha externamente, e abrindo o motor e desfazendo a conexo do
interruptor centrifugo e fazer a conexo com o interruptor externo; liga-se o motor a rede, aciona-se o
interruptor durante aproximadamente 2 segundos. Solues paliativas.
1.2 - Ligao dos motores de induo trifsico (MIT)
Os motores de induo trifsicos assncronos so os mais utilizados no setor industrial, pois a
alimentao de aproximadamente 95%, de todo montante de energia eltrica consumida, das cargas
utilizadas nesse setor so para receber alimentao de uma rede trifsica. O rendimento, a relao
peso / potncia, facilidades no comando e controle, valor comercial, dos motores de induo trifsicos
so muito mais atrativos comparados com o motor monofsico. A relao peso / potncia do motor
trifsico melhor em relao ao motor monofsico, devido o fato do motor trifsico no possuir bobina
auxiliar de partida, pois, o prprio sistema de alimentao do motor trifsico j ser defasado num
ngulo de 120 graus eltricos. Assim sendo as bobinas de um MIT (motor de induo trifsico) so
todas energizadas constantemente. Somente justifica-se o uso do MIM quando no se possui a rede
de alimentao no sistema trifsico, ou por um uso muito especfico. Os MIT possuem na sua grande
maioria 6 terminais acessveis, ou seja, constitudos por 3 bobinas. H tambm o uso de motores de
induo trifsico com 9 ou 12 terminais. o motor de 12 terminais constitudo por 6 bobinas, sendo 2
bobinas por fase. Cada bobina do motor de 12 terminais projetada para receber 220 Vac. Tem-se
com esse motor de 12 terminais a possibilidade de lig-lo em 4 valores de tenso de linha diferentes,
como ser visto a seguir.
17
1.2.1 - Ligao de Motores de Induo Trifasico com 6 Terminais
Figura 1.7 Representao das bobinas de um motor de induo trifsico com seis terminais
As bobinas de um motor trifsico, na sua grande maioria, so projetados e fabricados para um
valor de tenso de 220 Vac ou para 380 Vac.
Figura 1.8 Bobinas de um motor trifsico
18
1.2.1.1 Tipos de ligao do Motor de Induo Trifsico de 6
terminais
Ligao tringulo ou ligao Delta
Representao grfica Representao Vetorial
Figura 1.9 Representaes da ligao tringulo
Como cada bobina foi projetada para receber 220 Vac, e na rede de alimentao h 220 Vac
entre fases, assim sendo, cada bobina deve ficar ligada entre fases. Pela representao vetorial, o
nome da ligao denomina-se triangulo. Assim como a ligao mostrada abaixo para um motor em
que a Ub para 380 Vac.
Figura 1.10 Representaes da ligao tringulo (continuao)
19
Ligao estrela ou ligao ipsilon
Representao grfica Representao Vetorial
Figura 1.11 Representaes da ligao estrela
Como cada bobina foi projetada para 220 Vac, e na rede de alimentao h 220 Vac entre fase e
neutro, cada bobina deve ficar ligada entre fase e um ponto neutro. Pela representao vetorial
verifica-se que o somatrio dos valores das tenses no ponto onde esto conectados os terminais
finais das bobinas do motor igual a 0, ou seja, um ponto neutro. Para inverter o sentido de rotao
de um MIT, basta inverter a seqncia de fases na alimentao do motor, para tal, inverte-se apenas
duas fases.
Figura 1.12 Representaes da ligao estrela (continuao)
20
1.2.1.2 Clculo da Corrente Nominal do Motor de Induo Trifsico
Onde:
In (A): Corrente nominal em ampres;
P (cv): Potncia nominal em cavalo-vapor;
736 W/cv: equivalncia cavalo-vapor em watts;
UL: Tenso de linha aplicado aos terminais das bobinas do motor;
cos PHI: fator de potncia do motor;
Rendimento: razo entre a potncia de sada (potncia mecnica na ponta do eixo do motor) e a
potncia de entrada (tenso e corrente disponibilizada aos terminais do motor);
Raiz de 3: relao matemtica entre a tenso de fase e a tenso de linha, em um circuito
polifsico constitudo por trs fases defasadas de 120 graus.
1.2.1.3 Procedimento para identificao das bobinas de um MIT
Quando os terminais da bobina de um motor de induo trifsico no estiverem identificados,
deve-se fazer o seguinte procedimento para identificar os terminais da bobina. Tal procedimento se
faz necessrio para que no haja erro na ligao do motor.
a) Com o auxlio do ohmmetro deve-se medir a continuidade entre os condutores terminais das
bobinas do motor e numer-los conforme os nmeros que identificam o comeo e final da bobina. (1 e
4; 2 e 5; ou 3 e 6);
b) Ligar o motor conforme a UL disponvel na rede; a ligao ser sempre tringulo quando a
Ub=UL e sempre estrela quando Ub=UL/ 3. (1 tentativa)
c) Caso o motor partir com rudo anormal deve-se desenergizar imediatamente o motor e inverter
a numerao do 3 pelo 6 e ligar o motor novamente. (2 tentativa)
d) Caso o motor partir com rudo anormal deve-se desenergizar imediatamente o motor e inverter
a numerao do 2 pelo 5 e ligar o motor novamente. (3 tentativa)
21
e) Caso o motor partir com rudo anormal deve-se desenergizar imediatamente o motor e
reinverter a numerao do 3 pelo 6 e ligar o motor novamente. (4 tentativa). Feito esse ltimo
procedimento o motor ira partir normalmente.
1.2.2 - LIGAO DE MOTORES DE INDUO TRIFSICO COM 9
TERMINAIS
Figura 1.13 Representao das bobinas de um motor de induo trifsico com nove terminais
Os motores de induo trifsicos com 9 terminais acessveis podem ser ligados em redes de
alimentao com valores de tenso de linha iguais ao valor de tenso de bobina e com valor de
tenso de linha igual a duas vezes o valor de tenso de bobina. Se Ub= 220 Vac esse motor pode ser
ligado em UL= 220 Vac ou UL= 440 Vac. Esse motor usado em chaves de partida do tipo srie
paralelo, sendo que j h a ligao das bobinas de cada fase entre si ligadas em paralelo, quando
usado a chave tringulo srie - paralelo (UL= 220 Vac), ou as bobinas esto ligadas em estrela (une-
se os terminais 10, 11 e 12) e usa-se a chave estrela srie - paralela (UL= 380 Vac).
Os mesmos esquemas a seguir servem para outras tenses quaisquer, desde que sempre seja o
dobro da tenso de bobina, como por exemplo 220/440 ou 230/460Vac.
22
1.2.2.1 Tipos de Ligao do Motor de Induo Trifsico de 9
Terminais com o uso da Chave Tringulo Srie Paralelo
Tringulo Srie
Figura 1.14 - Tringulo Srie
Tringulo Paralelo
Figura 1.15 - Tringulo Paralelo
Na partida as bobinas do motor so ligadas em tringulo srie, sendo assim, as bobinas recebem
sobre seus terminais o valor de UL/2, ou seja, 110 Vac. Quando a chave comutada para ligao
tringulo paralelo, as bobinas recebem sobre seus terminais o valor de UL que igual ao valor de Ub.
Esse mtodo de partida usado para reduzir a corrente de partida consumida pelo motor.
23
1.2.2.2 Tipos de ligao do motor de induo trifsico de 9
terminais com o uso da chave estrela srie paralelo
Estrela Srie
Figura 1.16 - Estrela Srie
Estrela Paralelo
Figura 1.17 - Estrela Paralelo
Na partida as bobinas do motor so ligadas em estrela srie, sendo assim, as bobinas recebem
sobre seus terminais o valor de UF/2, ou seja, 110 Vac. Quando a chave comutada para ligao
estrela paralelo, as bobinas recebem sobre seus terminais o valor de UF que igual ao valor de Ub.
Esse mtodo de partida usado para reduzir a corrente de partida consumida pelo motor.
24
1.2.3 - Ligao de Motores de Induo Trifsico com 12 Terminais
Figura 1.18 Representao das bobinas de um motor de induo trifsico com doze terminais
O motor de 12 terminais pode ser ligado em 4 diferentes valores de tenso de linha. Possuem
duas bobinas por fase. H a possibilidade de ligar esse motor em redes de alimentao com valores
de tenso tpica de instalaes Sul Americanas (UL 220 Vac e UL 380 Vac), como tambm em redes
com valores de tenso de linha usadas em redes de distribuio encontradas na Europa e Norte
Americanas (UL 440 Vac). A rede de alimentao onde a tenso de linha de 760 Vac apenas um
demonstrativo de possibilidade de ligao, pois no h redes com esse valor de UL. Note que tanto
para o motor de 9 terminais acessveis e os com 12 terminais acessveis, a corrente eltrica percorre
as bobina da mesma fase com o mesmo sentido.
25
1.2.3.1 - Tipos de Ligao do Motor de Induo Trifsico de 12
Terminais
Tringulo Paralelo
Figura 1.19 - Tringulo Paralelo
Estrela Paralelo
Figura 1.20 - Estrela Paralelo
26
1.2.3.2 - Tipos de Ligao do Motor de Induo Trifsico de 12
Terminais
Tringulo Paralelo
Figura 1.21 - Tringulo Paralelo
Estrela Paralelo
Figura 1.22 - Estrela Paralelo
27
1.2.4 - Motores com Duas ou Mais Velocidades
1.2.4.1 Motores de duas velocidades com enrolamentos separados
Esta verso apresenta a vantagem de se combinar enrolamentos com qualquer nmero de plos,
porm, limitada pelo dimensionamento eletromagntico do ncleo (estator/rotor) e carcaa geralmente
bem maior que o de velocidade nica.
1.2.4.2 Motores de duas velocidades com enrolamento por
comutao de plos
O sistema mais comum que se apresenta o denominado ligao Dahlander. Esta ligao
implica numa relao de plos de 1:2 com conseqente relao de rotao de 1:2. Podem ser ligadas
da seguinte forma:
- Conjugado constante
O conjugado nas duas rotaes constante e a relao de potncia da ordem de 0,63:1. Neste
caso o motor tem uma ligao de D/YY. Exemplo: Motor 0,63/1cv - IV/II plos - D/YY. Este caso se
presta as aplicaes cuja curva de torque da carga permanece constante com a rotao.
- Potncia constante
Neste caso, a relao de conjugado 1:2 e a potncia permanece constante. O motor possui
uma ligao YY/D. Exemplo: 10/10cv - IV/II plos - YY/D.
Conforme a ligao que feita no motor criado um determinado numero de plos,
conseqentemente, uma determinada velocidade do rotor. Quando mudada a ligao para as outras
bobinas, ou invertido o sentido da corrente percorrido num conjunto de bobinas, criado um nmero
de plos diferentes da primeira ligao, conseqentemente, uma velocidade diferente no rotor. As
principais relaes de mudanas de nmero de plos so: 2/4 , 2/6, 2/8, 4/6, 4/8 e 6/8, sendo a
rotao sncrona para um motor de 2 plos de 3600rpm, 4 plos de 1800 rpm, 6 plos de 1200 rpm e
8 plos de 900 rpm. A primeira utilizao do motor dahlander era de obter uma forma de variao de
velocidade. Conforme a ligao feita no motor dahlander a tambm a possibilidade de se ter um
torque constante, potncia constante Com os avanos da microeletrnica e eletrnica de potncia, a
variao de velocidade de um motor de induo conseguida atravs da variao da freqncia e
tenso fornecida para o motor, com o uso do inversor de freqncia.
28
1.2.4.3 Exemplo ligao motor dahlander
Figura 1.23 - Motor com 4 plos considerando 2 bobinas de umas das fases.
Com a inverso do sentido da corrente em uma das bobinas teremos a formao de apenas 2
plos.
Figura 1.24 Inverso do sentido da corrente num motor dahlander para mudana do nmero de plos
29
1.2.4.4 Tipos de ligao para motores dahlander
Figura 1.25 - Tipos de ligao para motores dahlander
30
II - MOTOR DE INDUO TRIFSICO E
SUAS PARTES CONSTITUINTES
Figura 2.1 - Motor de induo trifsico
Onde:
Estator
1 Carcaa; 2 Ncleo de chapas; 8 Enrolamento (bobinas) trifsico;
Rotor
3 Ncleo de chapas; 7 Eixo ou veio; 12 Barras e anis de curto-circuito;
Outra partes
4 Tampa; 9 Caixa de ligao;
5 Ventilador; 10 Terminais das bobinas;
6 Tampa defletora; 11 Rolamentos.
31
Figura 2.2 - Motor de induo trifsico (continuao)
32
III - DIAGRAMAS ELTRICOS
APLICADOS A CHAVES DE PARTIDA
Os esquemas e diagramas das instalaes eltricas industrais so representados a partir das
conexes eltricas feitas atravs de condutores - fios, cabos ou barramentos -, entre os dispositivos e
equipamentos utilizados para manobra, comando, proteo, sinalizao, seccionamento, e demais
dispositivos. Todos dispositivos so desenhados, segundo a simbologia normatizada, no seu estado
natural desenergizado, ou, no caso de dispositivos de atuao sob ao de esforo mecnico, como,
botoeiras e seccionadores manuais, no seu estado natural sem a ao do esforo mecnico.
No caso de diagramas eltricos de uma subestao, QGBT ou de um CCM, o esquema unifilar
simplifica dispositivos ou equipamentos eltricos de mltiplos plos, que possuam comportamento
semelhantes ou iguais sob ao de energizao, como no caso dos contatos de um contator quando
energizado a bobina do mesmo. Nesses caso bastante usual indicar o sentido da corrente eltrica
pelos dispositivos eltricos como tambm o valor da corrente que circula pelos mesmos.
A seguir esto representados no modo multifilar e no modo unifilar, o esquema de fora uma
chave de partida direta. O esquema de comando sempre representado na forma multifilar.
33
3.1 Exemplo de esquema de fora de uma chave de
partida direta simples no modo unifilar e no modo
multifilar.
3.1.1 Modo Multifilar
Figura 3.1 - Esquema de fora de uma chave de partida direta simples no modo multifilar
34
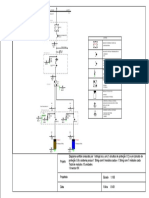
3.1.2 Modo Unifilar
Figura 3.2 - Esquema de fora de uma chave de partida direta simples no modo unifilar.
35
IV - COMANDOS MANUAIS SIMPLES PARA
MOTOR MONOFSICO E MOTOR TRIFSICO
Os comandos manuais simples, para dar partida em motores, normalmente so aplicados
para partir pequenas mquinas e ,em situaes em que o operador est diretamente controlando o
funcionamento da mquina. Esta situao mais comum ser vista em pequenas mquinas de uso
rural e industrial, como esteiras transportadoras.
Com esse comando o operador aciona o dispositivo de proteo que, com o fechamento dos
contatos energiza a carga. Para ser usado esse tipo de comando, normalmente, usado um disjuntor-
motor ou um disjuntor termomagntico com o nmero de plos do disjuntor no mnimo igual ao
nmero de pontos de energizao da carga. O comando se d apenas no local onde est montado o
comando. Esse mtodo de partida de motores o mais simples de ser feito, porm, os contatos do
dispositivo de comando devem ser feitos para manobra sob carga,
Figura 4.1 Exemplos de comando manuais simples de um MIM e de MIT
36
V - COMANDOS MANUAIS DE MOTORES
TRIFSICOS COM CHAVES DE TENSO
REDUZIDA
As chaves de partidas com tenso reduzida, com comando manual, o mtodo mais simples de
chave de partida usada para energizar um motor eltrico quando se necessita reduzir a corrente
eltrica absorvida pelo motor durante a partida. A comutao dos contatos da chave so feitos
manualmente atravs de uma alavanca, normalmente instalada na lateral externa da chave de partida
que montada dentro de um painel metlico. So fabricados chaves de partida manual tipo Y D e
auto - compensadora. O seu uso est mais restringido a acionamentos mais simples onde no se
necessita de um controle complexo sobre o funcionamento da chave e do motor, em relao ao
sistema no qual est inserido. Usado normalmente em bombas de levante em lavouras irrigadas,
mineradoras de pedras em britadeiras, compressores de ar e de amnia (NH3), entre outros.
Figura 5.1 Exemplo de uma chave de partida manual autocompensadora
37
Figura 5.2 Exemplo de uma chave de partida manual y - d
38
VI - COMANDOS NO MANUAIS, SEMI-
AUTOMTICOS E AUTOMTICOS DE
MOTORES TRIFSICOS
Existem trs mtodos de partir um motor de induo.
1 Partida direta: partida no qual o motor recebe o valor de tenso nominal das bobinas desde o
instante que energizado, por isso, tambm chamado de partida a plena tenso. Esse mtodo de
partida produz um elevado torque na partida, alto consumo de corrente na partida (entre 2 a 12 vezes
a corrente nominal In), pode provocar queda de tenso momentnea no ato de sua energizao,
ocasiona golpes mecnicos. Mtodo mais simples de acionar um motor, sendo aplicado a motores de
pequena potncia.
2 - Partida com tenso indireta: partida no qual o motor acionado com um valor de tenso sobre
suas bobinas menor do que o valor nominal, ocasionando assim uma queda na corrente consumida
no motor durante a partida. Aps o motor atingir cerca de 90% da sua rotao nominal o motor
energizado com o valor nominal da tenso de bobina do mesmo. Dentre as formas de se conseguir
esse mtodo de partida h o mtodo de partida estrela triangulo (o motor parte ligado em estrela e
aps atingir 90% da rotao nominal desfeito a ligao estrela e feito a ligao triangulo) e o mtodo
com chave autocompensadora (o motor na partida alimentado a partir da derivao de um
autotransformador e aps atingir cerca de 90% da rotao nominal o mesmo conectado diretamente
na rede de alimentao). Mtodos usados para reduzir o alto consumo de corrente eltrica consumida
pelo motor na partida, alm de ser exigido por norma. H tambm o mtodo com resistores e
indutores em srie com as bobinas do motor, indicado para motores de grande potncia e,
normalmente, motores alimentado em mdia ou alta tenso.
3 Partida com chaves eletrnicas: partida de motores no qual se usa uma chave de partida
eletrnica, chamada soft-starter, que com o uso dessa chave h um controle continuo no valor de
tenso eficaz aplicada ao motor, desde a partida at o regime nominal, no gerando altas correntes
de consumo pelo motor na partida e golpes mecnicos, no qual ocorre com os outros mtodos de
partida.
39
6.1 - Funo de um Dispositivo de Partida
A finalidade bsica de um dispositivo de partida de garantir o seguro acionamento de um motor,
visando a proteo do mesmo e da rede de alimentao contra curtos-circuitos, quedas de tenso,
sobrecargas, distrbios e rudos devido a dispositivos de acionamento eletrnico ou mau aterramento;
proteo das cargas acionadas (mquinas e equipamentos); e do seguro acionamento de partida e
parada do motor de modo a proteger os usurios (pessoas).
Figura 6.1 Composio mnima para uma chave de partida
40
6.2 -Composio de um Dispositivo de Partida
As funes que uma chave de partida deve assegurar segundo a norma IEC 60947-1so:
Seccionamento: A seccionadora um dispositivo que deve isolar eletricamente os circuitos de
potncia e comando da alimentao geral. Dependendo do tipo da seccionadora ela capaz de
fechar e interromper o circuito com ou sem carga e pode suportar um curto-circuito fechado. So
usados, normalmente para isolar uma mquina ou equipamento por inteiro da rede de alimentao.
Usa-se para tal funo seccionadoras de contatos tipo faca ou presso (apenas isola eletricamente os
circuitos), chave-fusvel (secciona e protege o circuito contra curto-circuitos) ou disjuntores
(seccionam, protegem contra curto-circuito e sobrecargas). O seccionador deve suportar a corrente
total do equipamento.
Proteo contra curtos-circuitos: um curto-circuito se manifesta por um aumento excessivo da
corrente eltrica, que alcana em poucos milisegundos valores iguais a at centenas de vezes a
corrente nominal de emprego. Para evitar que um curto-circuito danifique de forma muitas vezes
irreparveis s pessoas, bens e patrimnios, deve-se utilizar dispositivos que detectem e interrompam
o mais rpido possvel correntes anormais superiores a 10 x In. Aqui se devem considerar os
aspectos de proteo das pessoas e proteo dos bens e patrimnios. Usa-se para finalidade de
proteo das pessoas o disjuntor diferencial quando ocorrncia de falhas terra, podendo ocasionar
o choque eltrico devido ao contato direto ou indireto quando uma pessoa que entra em contato com
um condutor (contato direto) ou uma parte condutora que normalmente no esta energizada, mas que
se torna energizada acidentalmente (quando a uma falha de isolao por exemplo). Para essa
finalidade de proteo so usados fusveis, disjuntores limitadores e disjuntores termomagnticos.
Proteo contra sobrecargas: todas as cargas esto sujeitas a incidentes de origem eltrica e
mecnica como sobretenso, queda de tenso, desequilbrio ou falta de fase, rotor bloqueado,
sobrecargas mecnicas, etc. Todos incidentes provocam um aumento de corrente absorvida pelo
motor e um aquecimento perigoso nos enrolamentos do motor (efeito trmico). Para evitar estes
incidentes obrigatrio ter uma proteo contra sobrecargas, para detectar aumentos de corrente, de
sobre e subtenso e interromper a partida ou funcionamento antes que o aquecimento do motor e dos
condutores provoque a deteriorao dos isolantes. A sobrecarga o defeito mais freqente nas
mquinas. Segundo o nvel de proteo desejado e a categoria de emprego do receptor, a proteo
contra sobrecarga pode ser realizada com rels trmicos bimetlicos, rels para sondas e termistores,
rels eletrnicos multifuno e disjuntor-motor.
41
Comutao: a comutao consiste em estabelecer e interromper a alimentao dos receptores,
quando requer um comando semi ou automtico e uma grande cadncia de manobras. O uso
industrial para essa finalidade so do tipo eletromagnticos como os contatores , eletrnicos como
rels em estado slido (SSR solid state relay), disjuntor-motor, partidas combinadas, e as do tipo
eletrnicos como partidas progressivas (soft-starter e inversor de freqncia).
6.2.1 Definies das coordenadas de proteo - IEC 60 947-4
A montagem de uma chave de partida, deve atender a um dos tipos de coordenao de
proteo aplicadas aos dispositivos de seccionamento, proteo e comutao, segundo os tipos
abaixo.
Coordenao tipo 1
Sem riscos para as pessoas e instalaes, ou seja, desligamento seguro da corrente de curto-
circuito. O conjunto estar incapaz de continuar funcionando aps o desligamento, permitindo danos
ao contator e o rel de sobrecarga ou outro dispositivo.
Coordenao tipo 2
Sem riscos para as pessoas e instalaes, ou seja, desligamento seguro da corrente de curto-
circuito. No podendo haver danos ao rel de sobrecarga ou outro dispositivo, com exceo de leve
fundio dos contatos e estes permitam fcil separao sem deformao significativa.
42
6.3 - Glossrio
Termos tcnicos utilizados nessa apostila, segundo as normas vigentes.
Seccionadoras: dispositivo de manobra (mecnico) que assegura, na posio aberta, uma
distncia de isolamento que satisfaz requisitos de segurana especificados.
Nota: um seccionador deve ser capaz de fechar ou abrir um circuito, ou quando a corrente
estabelecida ou interrompida desprezvel, ou quando no se verifica uma variao significativa na
tenso entre terminais de cada um dos seus plos. Um seccionador deve ser capaz tambm de
conduzir correntes em condies normais de circuito, e tambm de conduzir por tempo especificado,
as correntes em condies anormais do circuito, tais como as de curto-circuito.
Interruptor: chave seca de baixa tenso, de construo e caractersticas eltricas adequadas
manobra de circuitos de iluminao em instalaes prediais, de aparelhos eletrodomsticos e
luminrias, e aplicaes equivalentes.
Contator: dispositivo de manobra (mecnico) de operao no manual, que tem uma nica
posio de repouso e capaz de estabelecer (ligar), conduzir e interromper correntes em condies
normais do circuito, inclusive sobrecargas de funcionamento previstas.
Disjuntor: dispositivo de manobra (mecnico) e de proteo, capaz de estabelecer (ligar),
conduzir e interromper correntes em condies normais do circuito, assim como estabelecer, conduzir
por tempo especificado e interromper correntes em condies anormais especificadas do circuito, tais
como as de curto-circuito.
Fusvel encapsulado: fusvel cujo elemento fusvel completamente encerrado num invlucro
fechado, o qual capaz de impedir a formao de arco externo e a emisso de gases, chama ou
partculas metlicas para o exterior quando da fuso do elemento fusvel, dentro dos limites de sua
caracterstica nominal.
Rel (eltrico): dispositivo eltrico destinado a produzir modificaes sbitas e predeterminado
em um ou mais circuitos eltricos de sada, quando certas condies so satisfeitas no circuito de
entrada que controlam o dispositivo.
Observao: O rel seja de que tipo for, no interrompe o circuito principal, mas sim faz atuar o
dispositivo de manobra desse circuito principal. Assim, por exemplo, existem rels que atuam em
sobrecorrente de sobrecarga ou de curto-circuito, ou de rels que atuam perante uma variao
inadmissvel de tenso. Por outro lado, os reles de sobrecorrente perante sobrecarga (ou
43
simplesmente rels de sobrecarga), por razes construtivas, podem ser trmicos (quando atuam em
funo do efeito joule da corrente sobre sensores bimetlicos), ou seno eletrnicos, que atuam em
funo de sobrecarga e que podem adicionalmente ter outras funes, como superviso dos
termistores (que so componentes semicondutores), ou da corrente de fuga.
Quanto s grandezas eltricas mais utilizadas, destacamos:
Corrente nominal: corrente cujo valor especificado pelo fabricante do dispositivo.
Nota do autor: Essa corrente obtida quando da realizao dos ensaios normalizados, conforme
comentrio anterior.
Corrente de curto-circuito: sobrecorrente que resulta de uma falha, de impedncia
insignificante entre condutores energizados que apresentam uma diferena de potencial em
funcionamento normal.
Corrente de partida: valor eficaz da corrente absorvida pelo motor durante a partida,
determinado por meio das caractersticas corrente-velocidade.
Sobrecorrente: corrente cujo valor excede o valor nominal.
Sobrecarga: parte da carga existente que excede a plena carga.
Nota: Esse termo no deve ser utilizado como sinnimo de sobrecorrente.
Capacidade de interrupo: um valor de corrente de interrupo que o dispositivo capaz de
interromper, sob uma tenso dada e em condies prescritas de emprego e funcionamento, dadas em
normas individuais.
Observao: A capacidade de interrupo era antigamente chamada de capacidade de ruptura,
termo que no deve mais ser usado. O valor da capacidade de interrupo de particular importncia
na indicao das caractersticas de disjuntores, que so, por definio, dispositivos capazes de
interromper correntes de curto-circuito, o que os demais dispositivos de manobra no fazem.
Resistncia de contato: resistncia eltrica entre duas superfcies de contato, unida em
condies especificada.
Observao: esse valor de particular interesse entre peas de contato, onde se destaca o uso
de metais de baixa resistncia de contato, que so normalmente produzidos por metais de baixo
ndice de oxidao, ou seno ainda, quando duas peas condutoras so colocadas em contato fsico,
passando a corrente eltrica de uma superfcie a outra. por exemplo, o que acontece entre o
encaixe de fusveis na base e a pea externa de contato do fusvel, que no pode ser fabricada com
materiais que possam apresentar elevada resistncia de contato.
44
6.4 - Chave de Partida Direta Simples
Segundo o regulamento da maioria das concessionrias brasileiras de energia eltrica, baseadas
na NBR 5410, um motor eltrico somente poder partir diretamente, ou seja, a plena tenso quando a
potncia do motor for igual ou inferior a 5cv sendo o mesmo alimentado por uma rede secundria de
alimentao em baixa tenso de 220/127 Vac ou, quando a potncia do motor for igual ou inferior a
7,5cv sendo o mesmo alimentado por uma rede secundria de alimentao em baixa tenso de
380/220 Vac, ou ainda, 9%, referida em cavalo vapor, da potncia, em KVA, do transformador da
subestao rebaixadora.
A chave de partida direta, ou, chave de partida a plena tenso, a forma mais simples de acionar
um motor eltrico. Como o prprio nome j diz, o motor acionado recebendo desde a partida,
momento em que o motor recebe tenso a partir do circuito alimentador, a tenso nominal para o qual
foi projetado, ou seja, se a bobina do motor foi projetada para receber 380 Vac, o mesmo receber
este valor de tenso desde o instante da partida at o regime nominal de funcionamento e assim
permanecer at ser desenergizado. Por haver um alto consumo de corrente eltrica na partida por
um motor eltrico (devido ao escorregamento e ao valor da tenso aplicado na partida) acionado pela
chave de partida direta, na ordem de 2 a 12 x In, h tambm nesse momento de partida uma
momentnea queda de tenso. Essa situao por vezes pode ser inconveniente pois, num circuito
alimentador normalmente h vrios consumidores. Entendendo como consumidor outras mquinas ou
equipamentos acionados por dispositivos eltricos em um mesmo estabelecimento, ou de um outro
estabelecimento vizinho alimentando pela mesma subestao ou QGBT. Essa queda de tenso
provocada pela partida direta do motor pode vir, em alguns casos, fazer um falso desligamento em
algum dispositivo de proteo ou vir a provocar um mal funcionamento de um equipamento
consumidor, de maneira as vezes at definitivo se for o caso de equipamentos eletroeletrnicos. Um
outro aspecto que deve ser visto o fato do motor eltrico gerar um alto torque de acelerao na
partida direta. Isto provoca os chamado solavancos, ou seja, golpes mecnicos na mquina acionada.
Em termos prticos tem-se a reduo da vida til dos componentes do equipamento, principalmente
em selos mecnicos, retentores, acoplamentos, mancais e rolamentos, fixadores, fadiga mecnica
dos materiais de transmisso de fora, e, nos casos de movimentao e transporte de fludos, ocorre
tambm golpes provocado pela rpida acelerao do fludo, o golpe de arete, que pode vir a provocar
danos em vlvulas, vedaes de flanges, registros, danos em alguns tipos de filtro, danos em
instrumentos de medio e verificao como manmetros, fadiga em pontos soldados da tubulao,
entre outros.
O grfico abaixo demonstra o comportamento da corrente eltrica absorvida por um motor
eltrico em funo do escorregamento, assim como a curva do torque produzida pelo motor partindo a
plena tenso.
45
Figura 6.2 Comportamento da corrente e conjugado de um motor partindo a plena tenso
A chave de partida direta aplicada em mquinas com qualquer tipo de carga; mquinas que
permitem normalmente suportar o conjugado (torque) de acelerao; fonte com disponibilidade de
potncia para alimentao; confiabilidade de servio pela composio e comando simples.
46
6.4.1 Esquema de fora da chave de partida direta no modo
multifilar e no modo unifilar
Multifilar Unifilar
Figura 6.3 - Esquema de fora da chave de partida direta no modo multifilar e no modo unifilar
Sendo:
Q1 + k1: Q1 = disjuntor motor, com funo de proteo contra curto-circuito e sobrecarga, com
contato auxiliar NF (95-96) para comando; k1 = contator de fora com funo de estabelecer e
interromper a alimentao do motor.
Q1 + k1 + FT1: Q1 = disjuntor motor, com funo de proteo contra curto-circuito e
sobrecarga, sem contato auxiliar NF (95-96) para comando; k1 = contator de fora com funo de
estabelecer e interromper a alimentao do motor; FT1 = rel de sobrecarga bimetlico com funo
de proteo contra sobrecargas, atravs da insero de seu contato auxiliar para comando NF (95-96)
no esquema de comando.
47
6.4.2 Esquema de comando da chave de partida direta
respectivamente aos esquemas de fora acima
Figura 6.4 Esquema de comando da chave de partida direta respectivamente aos esquemas de fora acima
Sendo:
L1 e L2: alimentao do comando conforme tenso de bobina do contator. Normalmente a
bobina do contator fabricada para: 380, 220 ou 110 Vac, ou 48, 24 ou 12 Vdc; por isso a
necessidade ora do uso do F22.
F21 e F22: fusveis, ou disjuntor mono ou bipolar, para proteo do circuito do comando, sendo
F22 de uso obrigatrio quando o circuito de comando alimentado entre fases, ou entre positivo e
negativo.
NF de Q1 ou NF de FT1 (95-96): contato auxiliar dos dispositivos de proteo com funo de
proteo do motor indiretamente com a abertura do circuito alimentador da bobina do contator.
SE + S0 + S1: SE = boto tipo soco para emergncia, com trava; S0 = boto pulsador com
funo de DESLIGA; S1 = boto pulsador com funo de LIGA.
48
6.5 Chave de partida direta simples com reverso
A chave de partida direta com reverso possui caractersticas semelhantes a chave de partida
direta. Os contatores usados na montagem dessa chave possuem a categoria de emprego diferente
dos utilizados na chave de partida direta, conforme as categorias de emprego mostradas nos anexos.
Quando a reverso feita aps o motor parar por completo, as curvas de corrente e torque em funo
da rotao ou escorregamento so idnticas ao grfico mostrado da chave de partida direta. Porm,
quando a comutao para reverso do motor ocorre com o motor em funcionamento, o tempo de
corrente de rotor bloqueado (Ip) maior. Este tempo corresponde ao tempo em que o motor custa a
reduzir a rotao do valor nominal a zero RPM e inverter o sentido de rotao.
A inverso do sentido de rotao se d atravs da inverso da seqncia de fase aplicada ao
motor. Para inverter o sentido de rotao se faz necessrio alterar somente a posio de duas fases
que alimentam o motor. A inverso da seqncia de fase feita atravs das conexes eltricas feita
nos plos de dois contatores como mostrado a seguir nos esquemas de fora e comando.
Quando feita a reverso do sentido de rotao do motor, estando o motor em funcionamento,
deve-se atentar que ocorre um momento de esforo mecnico toror no sistema de acoplamento da
mquina com o motor, principalmente, nos eixos das mquina motriz e motora. caracterstico as
mquinas e equipamentos que necessitem inverter o sentido de rotao, que a troca de peas
sobressalentes (rolamentos, selo mecnico, retentores, buchas, etc) sejam feitas num intervalo de
tempo mais curto em relao as mquinas acionadas por chaves de partida direta simples.
49
6.5.1 Esquema de fora da chave de partida direta com reverso no
modo multifilar e no modo unifilar
Multifilar Unifilar
Figura 6.5 - Esquema de fora da chave de partida direta com reverso no modo multifilar e no modo unifilar
Sendo:
Q1 + k1 + FT1: Q1 = disjuntor motor, com funo de proteo contra curto-circuito e
sobrecarga, sem contato auxiliar NF (95-96) para comando; k1 = contator de fora com funo de
estabelecer e interromper a alimentao do motor com uma determinada seqncia de fase; K2 =
contator de fora com funo de estabelecer e interromper a alimentao do motor com seqncia de
fase diferente de K1; FT1 = rel de sobrecarga bimetlico com funo de proteo contra
sobrecargas, atravs da insero de seu contato auxiliar para comando NF (95-96) no esquema de
comando.
50
6.5.2 Esquema de comando da chave de partida direta com
reverso
Figura 6.6 - Esquema de comando da chave de partida direta com reverso
Sendo:
L1 e L2: alimentao do comando conforme tenso de bobina do contator. Normalmente a
bobina do contator fabricada para: 380, 220 ou 110 Vac, ou 48, 24 ou 12 Vdc; por isso a
necessidade ora do uso do F22.
F21 e F22: fusveis, ou disjuntor mono ou bipolar, para proteo do circuito do comando, sendo
F22 de uso obrigatrio quando o circuito de comando alimentado entre fases, ou entre positivo e
negativo.
NF de Q1 ou NF de FT1 (95-96): contato auxiliar dos dispositivos de proteo com funo de
proteo do motor indiretamente com a abertura do circuito alimentador da bobina do contator.
SE + S0 + S1 + S2: SE = boto tipo soco para emergncia, com trava; S0 = boto pulsador com
funo de DESLIGA; S1 = boto pulsador com funo de LIGA num sentido de rotao e S2 no outro
sentido.
51
6.6 - Chave de partida indireta estrela tringulo (yd)
Segundo o regulamento da maioria das concessionrias brasileiras de energia eltrica, baseadas
na NBR 5410, um motor eltrico somente poder partir diretamente, ou seja, a plena tenso quando a
potncia do motor for igual ou inferior a 5cv sendo o mesmo alimentado por uma rede secundria de
alimentao em baixa tenso de 220/127 Vac ou, quando a potncia do motor for igual ou inferior a
7,5cv sendo o mesmo alimentado por uma rede secundria de alimentao em baixa tenso de
380/220 Vac, ou ainda, 9%, referida em cavalo vapor, da potncia, em KVA, do transformador da
subestao rebaixadora. Quando for observado que a partida do motor no esta de acordo com o
referido acima, deve-se ser utilizado um mtodo de partida que reduza a corrente absorvida pelo
motor na partida, afim de, no prejudicar o fornecimento de energia eltrica, mesmo que
momentaneamente, aos demais consumidores da rede de alimentao. Entende-se como rede no
apenas consumidores vizinhos, mas como tambm, as outras cargas de uma mesma rede terminal de
alimentao.
Para que possa ser usada a chave de partida estrela-triangulo o motor deve possuir os terminais
incio e fim das bobinas acessveis. O motor na partida ligado em estrela e assim ligado deve
receber o valor de tenso igual a Un/3. Quando o motor atingir cerca de 90% da rotao nominal
dever ser desfeito a ligao estrela realizar a ligao triangulo. Com o motor ligado em triangulo, ou
seja, cada bobina ligada entre fases, o motor devera receber sobre as bobinas o valor de tenso
nominal para o qual foi projetado. Como se v abaixo, com esse mtodo de partida h uma
significativa reduo na corrente consumida pelo motor na partida, diminuindo a possibilidade de
provocar quedas de tenso momentneas na rede de alimentao. Quando o motor comutado
de estrela para triangulo ocorre um aumento na tenso recebida pelas bobinas do motor,
conseqentemente, um pico de corrente consumida pelo mesmo. Isso ocorre devido ao intervalo de
tempo em que o motor no recebe tenso, que o tempo entre desfazer a ligao estrela e fazer a
ligao triangulo, ou seja, o motor estava recebendo um valor de tenso menor durante a partida,
desfeito a conexo estrela o motor no recebe alimentao, e quando feito a ligao triangulo o motor
alimentado plena tenso, porm, j com rotao prxima da nominal. A corrente na partida fica
reduzida a 1/3 da corrente de partida a plena tenso, porm, o conjugado disponibilizado no eixo do
motor tambm fica reduzido a 1/3 do conjugado de partida a plena tenso. Caso com o uso da chave
estrela-tringulo o motor no consiga movimentar a carga, ou, movimentar com severas dificuldades
na partida, deve-se optar por uma chave que aumente a tenso aplicada na partida,
conseqentemente e proporcionalmente, o conjugado de partida, mas que no aumente de forma
significativa a corrente de partida. Deve-se optar pela chave de partida autocompensadora ou por
uma chave de partida sof starter.
Somente possvel utilizar a chave de partida estrela tringulo quando a tenso de bobina for
igual a tenso de linha da rede de alimentao.
52
O mtodo de partida com tenso reduzida, ou, tenso indireta, do tipo estrela triangulo
aplicado em motores que acionam cargas ou mquinas que partem em vazio ou com conjugado
resistente baixo; esse mtodo alivia o conjugado ( torque ) de acelerao em base a tenso inicial (
reduzida ), e conseqente reduo da disponibilidade de potncia para alimentao do motor. H,
porm, no momento da comutao da ligao do motor de estrela para tringulo, alm de um pico de
corrente, uma acelerao brusca, devido ao aumento do torque do motor quando alimentado a plena
tenso, pois o torque diretamente proporcional ao quadrado da tenso. Isso no motor e na mquina
acionada significa um golpe, ou, solavanco mecnico, o que diminui a vida til do motor e da mquina,
diminuindo assim o intervalo de tempo da manuteno preventiva do motor e da mquina. H a
possibilidade de montar uma chave de partida Y D com reverso, porm, no mtodo mais simples
de inverso, no qual ser mostrado a seguir, a inverso poderia ocorrer sem a parada total do motor.
Para que haja a inverso deve-se aguardar o motor parar totalmente. Caso essa observao de notar
a parada total do motor seja dificultosa, deve-se ento, prever o tempo de parada por inrcia do
motor, ou da carga acionada, e, adicionar / incrementar esse valor de tempo no temporizador atravs
do ajuste de tempo no dial do mesmo.
Para ser aplicado a chave de partida Y D, o valor de tenso de bobina deve ser igual ao valor
de tenso de linha da rede. Como na partida o motor estar ligado por um intervalo de tempo em
estrela, o motor ir receber sobre seus terminais das bobinas o valor de tenso de fase da rede, que
raiz de trs vezes menor que da tenso de linha. Exemplos de tenso de bobina de motores e valores
de tenso de linha / tenso de fase de redes de alimentao onde se possam ligar motores com a
chave de partida Y D.: Motor 380/660 Vac Rede 380/220 Vac; Motor 220/380 Vac Rede 220/127
Vac ou 220/110 Vac.
Motor 380/660 Vac Rede 380/220 Vac, na partida o motor recebe, por estar ligado em estrela,
220Vac (UF), aps quando ligado em triangulo, recebe 380 Vac (UL).
O princpio de funcionamento da chave de partida Y-D se baseia em:
Designando:
Un: tenso nominal
Uf: tenso de fase
X: reatncia por fase
In: corrente nominal de alimentao
Ip: corrente de partida por fase
K: constante relacionada forma construtiva do motor
M: momento ou conjugado de partida, proporcional ao quadrado de Uf
53
E baseado no esquema de ligao dos enrolamentos, a seguir,
Figura 6.7 - Esquema de ligao dos enrolamentos
54
Relacionando entre si a corrente de alimentao e os momentos de partida, resulta que,
passando da ligao estrela para a tringulo, temos a relao de 1:3, como segue:
O grfico abaixo demonstra o comportamento da corrente eltrica absorvida por um motor
eltrico em funo do escorregamento, assim como a curva do torque produzida pelo motor partindo
com uma chave do tipo estrela tringulo. O pico de corrente ocasionado pelo degrau de tenso
que ocorre quando da comutao de estrela para triangulo.
Figura 6.8 - Comportamento da corrente e conjugado de um motor partindo com uma chave de tenso indireta Y D
Comportamento da corrente e conjugado de um motor partindo com uma chave de tenso
indireta Y D. O pico de corrente ocorre quando ocorre a comutao de Y para D.
55
6.6.1 Esquema de fora da chave de partida y d automtica no
modo multifilar e no modo unifilar
Multifilar Unifilar
Figura 6.9 - Esquema de fora da chave de partida y d automtica no modo multifilar e no modo unifilar
Sendo:
Q1,2 + k1,2,3 + FT1: Q = seccionador porta-fusvel, com funo de proteo contra curto-circuito
sem contato auxiliar NF (95-96) para comando; k = (k1+k3) contator de fora com funo de
estabelecer e interromper a alimentao do motor na partida em estrela sendo K3 com funo de
fechar o centro da estrela da ligao do motor; k1+k2 fecham a ligao tringulo; FT1 = rel de
sobrecarga bimetlico com funo de proteo contra sobrecargas, atravs da insero de seu
contato auxiliar para comando NF (95-96) no esquema de comando.
56
6.6.2 Esquema de comando da chave de partida y d automtica
Figura 6.10 - Esquema de comando da chave de partida y d automtica
L1 e L2: alimentao do comando conforme tenso de bobina do contator. Normalmente a
bobina do contator fabricada para: 380, 220 ou 110 Vac, ou 48, 24 ou 12 Vdc; por isso a
necessidade ora do uso do F22.
F21 e F22: fusveis, ou disjuntor mono ou bipolar, para proteo do circuito do comando, sendo
F22 de uso obrigatrio quando o circuito de comando alimentado entre fases, ou entre positivo e
negativo.
NF de Q1 ou NF de FT1 (95-96): contato auxiliar dos dispositivos de proteo com funo de
proteo do motor indiretamente com a abertura do circuito alimentador da bobina do contator.
SE + S0 + S1: SE = boto tipo soco para emergncia, com trava; S0 = boto pulsador com
funo de DESLIGA; S1 = boto pulsador com funo de LIGA.
RT1: rel temporizador com funo de estabelecer o tempo de comutao da ligao estrela para
triangulo.
57
6.6.3 Esquema de fora da chave de partida y d automtica com
reverso no modo multifilar
Figura 6.11 - Esquema de fora da chave de partida y d automtica com reverso no modo multifilar
58
6.6.4 Esquema de comando da chave de partida y d automtica
com reverso
Figura 6.12 - Esquema de comando da chave de partida y d automtica com reverso
Normalmente o ajuste de tempo no rel temporizador, para que seja feita a comutao de da
ligao estrela para triangulo, em torno de 10 a 15 segundos, conforme o torque resistente da
carga. Caso ocorre-se a comutao antes desse tempo, que o tempo em que o motor leva pra
acelerar de 0 a aproximadamente 90% da rotao nominal, ocorreria um pico de corrente mais
elevado, podendo ser at, proporcional a corrente da partida direta (triangulo nesse caso), como
mostrado no grfico do comportamento da corrente com o uso da chave Y D. Quando usado
reverso na chave Y D, e usado o comando acima, sendo esse o mais simples para tal funo,
deve-se adicionar o tempo em que o motor leva para parar completamente, independente do mtodo
de parada. Normalmente a parada por inrcia, e esse tempo deve-se ser incrementado no rel
temporizador, para evitar uma inverso do sentido de rotao estando o motor ainda em movimento
no sentido oposto.
59
6.7 - Chave de partida indireta autocompensadora ou
compensadora
Como visto na chave Y D, o valor de tenso aplicado ao motor, na partida, fica restringido a
58% do valor da tenso nominal. Esse valor de tenso produz um valor de conjugado que ,por vezes,
no capaz de acionar / acelerar a mquina movida. Isso ocorre devido o conjugado ser diretamente
proporcional ao quadrado da tenso, nesse caso, o conjugado de partida, assim como a corrente de
partida, ficaria limitado a 1/3 dos valores nominais. Quando com o uso da chave Y D, for observado
que no ocorre a acelerao em tempo hbil para efetuar a comutao de estrela para triangulo, sem
que tal procedimento ocasionasse um elevado pico de corrente e, conseqentemente, um elevado
golpe mecnico na carga, deve-se utilizar um mtodo de partida que aumente o valor de tenso
aplicada ao motor, na partida, para que, com esse valor de tenso, seja produzido pelo motor um
valor de conjugado maior, sendo que esse valor de conjugado maior seja capaz de acelerar a
mquina, ou seja, produza uma curva de conjugado maior que a curva do conjugado resistente da
carga.
A chave de partida compensadora consistente em, na partida, alimentar o motor a partir da
derivao de um autotransformador. O autotransformador trifsico usado para essa utilidade,
normalmente ligado em estrela e, consiste num transformador com um nico enrolamento por lado,
ou fase, de um ncleo ferro-magntico. As derivaes mais usuais de um autotransformador, so de
80, 65% ou 80, 65 e 50%.
Figura 6.13 - Representao das bobinas de um autotransformador ligado em estrela
60
6.7.1 Exemplo dos valores de tenso das derivaes de um
autotranformador
O valor de tenso nas derivaes do auto transformados so em percentuais dos valores
nominais aplicados aos terminais 100%. Lembrando que a relao existente entre a tenso de linha e
a tenso de fase de raiz de 3.
Figura 6.14 - Valores de tenso de fase e de linha em um autotransformador ligado em Y
Quando acionado o comando para partir o motor, o mesmo alimentado a partir de uma das
derivaes do autotransformador (80 ou 65%). Aps atingir cerca de 90% da rotao nominal, o
motor passa a ser alimentado, por um curtssimo intervalo de tempo, tanto a partir da derivao do
autotransformador, como pela rede de alimentao principal, at que o autotransformador by-
passado e o motor fica continuamente alimentado pela rede de alimentao principal, como ser visto
a seguir. Com a chave de partida Y D, a forma de se conseguir uma menor corrente de partida,
indiretamente atravs da diminuio do valor de tenso aplicada as bobinas do motor, est na forma
de como o motor est ligado na partida e de como ser ligado em regime nominal. J com a chave
autocompensadora a diminuio da tenso aplicada ao motor, e conseqentemente diminuio da
corrente de partida, esta no fato da alimentao do motor, na partida, derivar de uma rede de
alimentao momentnea, com valores de tenso diferentes da rede de alimentao principal,
conseguido atravs do uso de um autotransformador.
61
6.7.2 Esquemas de ligao dos enrolamentos
Figura 6.15 - Esquemas de ligao dos enrolamentos
6.7.3 Demonstrao dos clculos com derivao de 65%.
62
6.7.4 Exemplo da chave de partida autocompensadora, no modo
unifilar, com os valores de corrente por ramo do circuito, conforme
derivao do autotransformador.
Figura 6.16 - Exemplo da chave de partida autocompensadora
Note que no h modificao na ligao do motor. O motor pode, para quando usado uma chave
autocompensadora, ter apenas 3 terminais acessveis, no entanto, deve estar ligado de tal maneira a
receber o correto valor de tenso nas bobinas, ou seja, a plena tenso.
Exemplos motores com 3 terminais acessveis (ligao estrela ou triangulo j vem pronto de
fbrica atravs de ligao fixa soldada entre os terminais da bobina do motor):
Motor 380 Vac ligado em triangulo Rede 380/220 Vac.
Motor 380 Vac ligado em estrela Rede 660/380 Vac.
Motor 220 Vac ligado em triangulo Rede 220/127 Vac ou 220/110 Vac.
Motor 220 Vac ligado em estrela Rede 380/220 Vac.
63
6.7.5 Esquema de fora da chave de partida autocompensadora
automtica no modo multifilar e no modo unifilar
Multifilar Unifilar
Figura 6.17 - Esquema de fora da chave de partida autocompensadora automtica no modo multifilar e no modo
unifilar
64
6.7.6 Esquema de comando da chave de partida autocompensadora
automtica
Figura 6.18 - Esquema de comando da chave de partida autocompensadora automtica
L1 e L2: alimentao do comando conforme tenso de bobina do contator. Normalmente a
bobina do contator fabricada para: 380, 220 ou 110 Vac, ou 48, 24 ou 12 Vdc; por isso a
necessidade ora do uso do F22.
F21 e F22: fusveis, ou disjuntor mono ou bipolar, para proteo do circuito do comando, sendo
F22 de uso obrigatrio quando o circuito de comando alimentado entre fases, ou entre positivo e
negativo.
NF de Q1 ou NF de FT1 (95-96): contato auxiliar dos dispositivos de proteo com funo de
proteo do motor indiretamente com a abertura do circuito alimentador da bobina do contator.
SE + S0 + S1: SE = boto tipo soco para emergncia, com trava; S0 = boto pulsador com
funo de DESLIGA; S1 = boto pulsador com funo de LIGA.
RT1: rel temporizador com funo de estabelecer o tempo de comutao da ligao em que o
motor recebe alimentao a partir da derivao do autotransformador.
65
No comando da chave de partida autocompensadora, se for garantido que a abertura de K2
ocorra somente depois do fechamento de K1, o motor fica recebendo alimentao na comutao da
chave. Para obter essa garantia que se justifica o uso do contator KA (esquema de comando). O
contator K2 permanecendo ligado na comutao da chave autocompensadora da condio de partida
para a condio de regime do motor, ainda proporciona uma mudana menos brusca de tenso
porque estando K2 ligado, sem que K3 esteja ligado, uma parte da bobina do autotransformador fica
em srie com o motor. Por tudo isso, a chave autocompensadora no provoca tranco causado pela
mudana brusca de tenso como na chave Y D, e o golpe mecnico de baixa intensidade.
A chave de partida autocompensadora tambm pode ser reversora. pouco usual por tratar-se,
normalmente, de acionamentos de grandes mquinas que possuem grandes potncias. Aps a
partida do motor a autocompensadora fica inativa, sendo possvel a sua utilizao para partir outro
motor, atravs da combinao e intertravamentos com o comando dos outros motores.
66
6.8 - Chave de Partida Semi - Automtica
As chaves de partida semi-automticas so caracterizadas segundo a forma em que feito o
acionamento ou o desacionamento. No exemplo abaixo, o desligamento do motor feito por uma
chave de nvel (S2) automaticamente quando o nvel desejado atingido, enquanto que o
acionamento do motor no feito automaticamente pelo decrscimo do nvel, mas sim, quando
acionado o boto pulsador S1, e a reteno do contator feito atravs do selo mecnico. Trata-se de
um sistema de acionamento semi-automtico e desacionamento automtico.
Figura 6.19 - Chave de Partida Semi - Automtica
67
6.9 - Chave de Partida Automtica
As chaves de partida automtica so caracterizadas pelo modo em que so acionadas e
desacionadas, assim com tambm, quando se necessita de uma mudana de estado
automaticamente, sem interveno na mudana de estado por meio manual. As chaves de partida
estrela tringulo e a autocompensadora, mostradas anteriormente, so chamadas automticas pelo
fato de no haver interveno manual na comutao da ligao do motor de estrela para tringulo, no
caso da chave de partida estrela - tringulo, assim como da mudana do circuito de alimentao do
motor na chave de partida autocompensadora. O exemplo mostrado a seguir mostra uma chave de
partida automtica com habilita. S haver o acionamento do motor caso o sentido da seqncia de
fases esteja de R pra S pra T, assim como o operador habilite o funcionamento atravs da manopla
S1, e o nvel de um determinado sistema esteja baixo (S2 fechado). Logo atingido o nvel desejado o
motor desenergizado pela abertura de K1. To logo o nvel comece a diminuir o motor energizado
novamente, sem que o operador tenha que acionar o sistema novamente.
Figura 6.20 - Chave de Partida Automtica
68
O exemplo a seguir mostra uma chave de partida puramente automtica. As condies de
acionamento so unicamente haver tenso na rede de alimentao, e os dispositivos de proteo
estarem em condies de uso e habilitados. Tanto o acionamento do motor, como o desligamento do
mesmo feito exclusivamente pelo acionamento da chave de nvel.
Figura 6.21 - chave de partida puramente automtica
69
VII - CONTATOR OU REL EM ESTADO
SLIDO
Os rels em estado slido (SSR solid state relay), so componentes eletrnicos totalmente em
estado slido, ou seja, no possuem elementos mecnicos mveis. Visam principalmente a
substituio de rels comuns e contatores, incorporando uma srie de vantagens. Os rels em estado
slido no possuem desgaste de contatos mecnicos, pois estes no existem, tornando maior a vida
til. Respondem a freqncia de acionamento elevadas, permitindo assim controle de luminosos e
temperatura de forma direta, precisa e econmica. Os SSR possuem detector de cruzamento de zero
zero crossing ligando cargas AC no cruzamento de zero da tenso (senide) e desligando no
cruzamento de zero da corrente, evitando assim, interferncias em outros equipamentos
(harmnicos), alm de aumentar muito a vida til da carga (no caso de uma resistncia ou lmpada
cerca de 3 a 4 vezes). A corrente de acionamento so muito baixas, comparadas com rels comuns
ou contatores. Usado em chaveamento de cargas e resistivas e indutivas, nos controles com
freqncias elevadas e ambientes com baixa emissividade de rudos, tanto eltrico quanto mecnico.
Esses rels so divididos em duas categorias: uma de pequena potncia denominada MDULOS
I/O e outra denominada CHAVES ESTTICAS. Os mdulos I/O, podem ser de sada AC ou DC e
entradas AC ou DC. Os mdulos de sada so comandados por sinais de baixa corrente (da ordem de
10mA) em tenses que variam de 5, 15 ou 24 VDC para acionamento de cargas AC de 24 a 280 VAC
(4 A) ou cargas DC de 5 a 60 VDC (3 A) ou 5 a 200 VAC / VDC, e os sinais de 5, 15 ou 24 VDC
podem ser acoplados diretamente a sistemas de controle para monitorao como SDCD e CLP.
Todos este modelos so acoplados opticamente com isolao de 4000 VRMS entre entrada e sada e
podem ser instalados em carto de circuito impresso, PCI ou trilhos DIN, o que permite grande
facilidade na montagem em painis e mquinas, incorporando inclusive fusveis de proteo
70
7.1 Funcionamento
Ao receber um sinal de comando em seus terminais de entrada (INPUT), o SSR conduz (liga)
e alimenta a carga. A conduo acontece efetivamente na prxima passagem por zero da tenso de
rede. No desligamento acontece o mesmo. O sinal de comando retirado, porm o SSR somente
bloqueia (desliga) na prxima passagem por zero. Isto implica em atrasos nunca superiores a 8,3
milisegundos entre o instante de disparo do comando LIGA / DESLIGA e a efetiva alimentao /
desalimentao da carga. O fato de ligar e desligar a alimentao da carga sempre em um
cruzamento por zero da tenso de rede trs vantagens importante para instalao. Praticamente no
so geradas interferncias eltricas na instalao e o SSR no submetido a condies severas de
chaveamento. Outra implicao a impossibilidade de chavear tenso contnua (DC), somente
tenso alternada (AC).
Figura 7.1 - Funcionamento
71
7.2 - Conexes Eltricas
So duas ligaes necessrias: Sinal de comando e ligao com a carga. Na ligao com a
carga, um fusvel ultra-rpido deve ser utilizado para proteger a instalao. Terminais bem fixados e
fios adequados ajudam na eficincia de instalao
Figura 7.2 - Conexes Eltricas
72
VIII CHAVES DEPARTIDA ESTTICA;
ACIONAMENTO DE MOTORES COM CHAVES
DE PARTIDA ELETRNICA EM ESTADO
SLIDO, MICROPROCESSADA
8.1 - Chave de partida soft-starter / stop
Como vimos anteriormente, tanto a partida estrela - tringulo como a partida compensadora
provocam solavancos ao passarem de uma posio de tenso reduzida para a posio de tenso
plena. Para as cargas que exijam acionamentos suaves acopladas a motores de grande porte usa-se
atualmente a partida suave com eletrnica de potncia (soft-starter). o caso dos ventiladores,
bombas e compressores de grande porte, esteiras transportadoras de potncia, mquinas de grande
momento de inrcia, etc.
8.1.1 - Princpio de Funcionamento
As chaves de partida esttica, ou, chaves de partida em estado slido, assim chamados por
no haver comutao tipo ON-OFF, como o contator, so dispositivos de manobra (microprocessado),
adequado para partida e parada suave de motores assncronos trifsicos, onde desejamos eliminar os
altos conjugados de acelerao do motor e picos de corrente na partida. A partida suave atualmente
a mais utilizada em cargas acionadas por motores de potncias superiores, operando em categoria de
emprego AC-2 e AC-3. Assim, sua aplicao mais encontrada em ventiladores, esteiras
transportadoras, bombas, compressores, mquinas com grande momento de inrcia de modo geral, e
outros semelhantes. Dados para uma melhor especificao podem ser inseridos em um programa
de simulao em PC e um programa de comunicao para colocao em operao, gerenciamento e
manobra em PC. Atravs de um programa de comunicao / parametrizao podemos coloc-lo em
operao, gerenciar e manobrar atravs de um PC.
73
Como principais caractersticas podemos mencionar:
Aplicao no acionamento de mquinas que partem em vazio e com carga;
Permite parametrizao de tenso oferecendo uma acelerao / desacelerao progressiva e
uniforme da mquina, o que possibilita a reduo da potncia necessria;
A qualidade de superviso precisa ser de nvel mais sofisticado;
Ausncia de choques mecnicos (trancos) na acelerao / desacelerao da mquina, o que
aumenta consideravelmente os intervalos de manuteno contribuindo para uma maior vida til do
equipamento e pelas caractersticas bsicas, tem substitudo a partida por autotransformador
(compensadora) e estrela - tringulo.
Neste mtodo de partida, o controle da potncia fornecida na fase de partida feita mediante um
escalonamento da frao da tenso de alimentao fornecida a cada instante, em um dado nmero
de semiciclos de tenso, que pode ser ajustado s caractersticas desejadas, at o seu valor pleno.
Esse programa de escalonamento executado por meio de um par de tiristores por fase, ligados em
antiparalelo, e que atuam em funo de um programa previamente estipulado. Com esse
procedimento, tem-se a possibilidade de partir do estado de repouso e chegar ao de rotao plena,
atravs de uma srie de degraus, cuja variao atende plenamente prpria curva de carga. Nos
primeiros modelos de chaves de partida esttica, as soft starters, havia apenas a possibilidade de
controle da acelerao do motor. Ainda mais remoto, os primeiros modelos possuam controle em
apenas uma das fases, aps foi desenvolvido o de controle a duas fases, e hoje o mais utilizado o
que tem a capacidade de controle nas trs fases, melhorando a potncia por fase. Ainda so
fabricados soft starters com controle a duas fases. O que feito na acelerao, pode ser feito, no
sentido inverso, na desacelerao, partindo-se da onda de tenso plena e chegando-se, passo a
passo, a interrupo total da ondas de tenso, como mostra as figuras abaixo.
Figura 8.1 Tiristores SCRs ligados em anti - paralelo, sendo 2 por fase, controle nas trs fases
74
8.1.1.1 Perodo de acelerao
No perodo de partida do motor feito o controle do valor eficaz de tenso aplicado ao motor,
feito atravs do controle do ngulo de disparos dos tiristores SCR. O tempo de disparo calculado
por um microprocessador que controla a eletrnica dedicada ao acionamento do gate (gatilho) dos
tiristores, que permitem a passagem de tenso, a partir da parametrizao feita pelo usurio no tempo
de rampa de acelerao.
Aps o perodo de acelerao h duas possibilidades para o uso dos tiristores:
a) Os tiristores aps serem usados para controlar o ngulo de disparo dos semiciclos, at entrar
em estado de disparo em ngulo 0, ou seja, plena conduo como se estivesse a carga ligada
diretamente a rede de alimentao, podem ser desacionados, ou seja, acionado o rel de by-pass
da chave, que montado em paralelo com cada par de tiristores por fase, e o motor recebe
alimentao diretamente da rede de alimentao. A soft starter fica funcionando como controlador
de corrente da carga, podendo, dependendo da parametrizao, desacionar a carga em caso de
alguma falha no funcionamento da carga, ou falha na rede de alimentao. Tambm h a
possibilidade de leitura de outras valores de grandeza referentes a carga, como fator de potncia,
temperatura do dissipador de calor, valor de tenso percentual aplicada ao motor (nesse caso 100%),
entre outros.
Figura 8.2 - Acelerao
b) Com o uso das chaves de partida soft-starter, em alguns modelos, h a possibilidade de uma
parametrizao para economia de energia. Com essa funo os tiristores no podem estar
desacionados, ou seja, o rel de by-pass deve estar desabilitado. H uma continua superviso na
corrente absorvida pelo motor, e os tiristores entram em estado de corte de uma parte do semiciclo,
diminuindo o valor eficaz de tenso aplicada ao motor, conseqentemente, da corrente absorvida pelo
mesmo, como mostrado na figura a seguir. H o inconveniente de gerao de distrbios provocados
por harmnicos, quando do uso de economia de energia.
Modo economia de energia
Figura 8.3 Otimizao para carga parcial
75
8.1.1.2 Perodo de desacelerao
Ocorre exatamente o inverso do perodo de acelerao. Estando os tiristores desacionados,
quando do acionamento do desligamento da carga, os tiristores entram em funcionamento em estado
de plena conduo (disparo em ngulo 0); nesse momento o rel de by-pass aberto, e o
microprocessador, em funo do tempo de desacelerao parametrizado pelo usurio, aciona o
comando eletrnico para controle do ngulo de corte dos semiciclos, at chegar em estado de pleno
corte, ou seja, o desligamento do motor.
Figura 8.4 - Desacelerao
8.1.1.3 Comportamento do conjugado acelerante de um motor com
o uso de uma chave de partida soft starter em relao a
partida direta.
Figura 8.5 - Grfico
Mm: conjugado desenvolvido a partir de uma partida a plena tenso (direta);
Msi: conjugado desenvolvido a partir de uma partida com controle do valor eficaz de tenso
aplicada ao motor (chave de partida soft starter);
ML: conjugado resistente desenvolvido pela carga acionada.
76
8.1.1.4 Comportamento da corrente eltrica absorvida por um motor
com o uso de uma chave de partida soft starter em relao a
partida direta.
Figura 8.6 Grfico 2
In: corrente nominal a plena carga e plena tenso;
Ip: corrente consumida pelo motor com o uso da partida direta;
Isi: corrente consumida pelo motor com o uso da soft - starter
77
8.1.1.5 Oscilogramas comparativos entre mtodos de partida
Figura 8.7 - Partida direta
Figura 8.8 - Partida estrela - tringulo
Figura 8.9 - Partida suave soft - starter
78
8.1.2 - Tipos de Soft Starter
A) Controle a uma fase
H modelos no mercado que controlam apenas uma das trs fases na partida. A fase controlada,
alis, , de fato, controlada apenas na janela de tempo de partida. Quando o motor atinge a rotao
nominal, o soft-starter funciona como um contator, ligando-o diretamente na rede de alimentao.
Veja na figura abaixo como uma fase tem sua potncia limitada at o instante de plena potncia. A
figura ilustra o primeiro tipo, onde apenas uma das fases, nesse caso a R controlada atravs de um
circuito que adianta ou atrasa o ngulo de disparo , e cujos pulsos de disparo so enviados ao SCR.
Notem que, medida que o tempo passa (inrcia sendo vencida), o ngulo de disparo vai diminuindo.
Conforme o ngulo de disparo reduz, o de conduo aumenta, permitindo que uma maior parcela da
senide chegue na carga, aumentando o valor eficaz de tenso aplicada no motor,
conseqentemente, maior conjugado.
Figura 8.10 - Soft starter com controle em apenas uma fase
79
B) Duas fases controladas
Essa a arquitetura mais popular no mercado. A figura abaixo ilustra como R e T so
controladas enquanto S vai direto a motor. Deve-se ter o cuidado quando da interveno de
manuteno no motor pois uma das fases est diretamente conectada ao motor, ou seja, tem-se
potencial no motor.
Figura 8.11 - Soft starter com controle em duas fases, com rel de by-pass e bimetlico contra sobrecarga
80
C) Duas fases semi - controladas
Um outro tipo de soft starter utilizado ilustrado na figura abaixo onde montado dois SCRs
ligados em antiparalelo com dois diodos. Isso prov uma senide semicontrolada nas fases R eT
(nesse exemplo) sendo que apenas um semiciclo chaveado. . Deve-se ter o cuidado quando da
interveno de manuteno no motor pois uma das fases est diretamente conectada ao motor, ou
seja, tem-se potencial no motor.
Figura 8.12 - Soft Starter com duas fases semi - controladas
81
D) Trs fases controladas
Esse tipo de soft-starter o que possui a melhor disponibilidade de controle e recursos
quando se necessite de uma parametrizao mais refinada em funo da carga acionada. Nesse tipo
de soft starter as trs fases R, S e t so controladas atravs do ngulo de disparo dos tiristores, que
so montados, normalmente, com dois tiristores SCR em antiparalelo e, um rel de by-pass em
paralelo com os tiristores. Com essa configurao dos tiristores tem-se mais precisamente, e maior
simetricamente, o controle da potncia nas trs fases.
Figura 8.13 - Soft starter com controle em trs fases, com rel de by pass e bimetlico contra sobrecargas
82
8.1.3 - Parametrizao do soft starter
A parametrizao consiste em ajustar os parmetros segundo as variveis do motor e o modo
como o conjunto motor / carga / mquina / sistema ira atuar. Dependendo do modelo e do fabricante
da chave soft starter, pode ser parametrizada das seguintes maneiras.
a) Via potencimetros: o modo mais simples de parametrizar uma chave de partida soft
starter. Esse tipo de parametrizao aplica-se as soft starters mais simples, onde h, normalmente,
a parametrizao do tempo de rampa de acelerao, tempo de rampa de desacelerao, tenso
inicial aplicada ao motor na partida (percentual do valor de tenso nominal aplicado na alimentao de
fora da chave), e limitao da corrente consumida pelo motor.
Figura 8.14 - Parametrizao via potnciometros
83
Figura 8.15 - Parametrizao da soft starter via potencimetros
84
b) Via software dedicado: esse modo de parametrizao feito atravs da porta de comunicao
serial (RS-232 OU RS-485) do soft starter (quando possui essa opo) que conectado a uma
porta de comunicao de um computador ou a uma rede (switch). preciso, no entanto, possuir
instalado no computador o software de programao fornecido pelo fabricante, e, que o software
tenha atualizado os drives referentes a chave que se quer parametrizar, com a verso de firmware
referente ao programa instalado na soft starter. Esses dados vm impressos numa etiqueta colada
na chave, como tambm, etiquetado em cima do processador do soft starter. Com o software de
parametrizao, tambm possvel, alm de parametrizar a soft starter, supervisionar, em tempo
real, estando a chave on-line com o computador, seja diretamente ou atravs de uma rede, as
variveis referentes ao funcionamento e comportamento da chave como tambm do motor, tais como,
valor de corrente do motor, valor de tenso aplicada ao motor, estado da chave (habilitada - ready, em
funcionamento run, ou em falha fault), entre outros.
Figura 8.16 - Parametrizao da soft starter via software dedicado
85
c) Via IHM ou HMI: a parametrizao via IHM o mtodo mais usual de se parametrizar uma soft
starter quando essa possui IHM. Normalmente essa parametrizao via IHM se faz em campo, ou
seja, no local onde est instalado a chave, seja num CCM dentro de uma sala onde se encontram os
QGBTs, ou num CCM prximo a carga a ser acionada. Essas soft-starters geralmente tambm
possuem comunicao serial, mas nem sempre possvel comunicar com uma rede ou computador,
devido ao local onde se encontra a chave. As parametrizaes feitas no local via porta de
comunicao serial normalmente so feitas com um laptop, e nem sempre se tem um a disposio
para tal. Para parametrizar a chave via IHM deve se ter o manual da chave com a descrio
detalhada de cada parmetro, assim como em alguns casos, o parmetro de desbloqueio, ou, acesso
aos parmetros que se deseja modificar, em funo sempre da carga acionada.
IHM (interface homem-mquina) de uma chave de
partida soft starter. Para efetuar a parametrizao
preciso acessar o manual da chave e realizar a
parametrizao atravs das teclas da IHM.
Figura 8.17 - Parametrizao da soft starter via IHM
86
8.1.4 - Aplicaes e ligaes feitas com a soft starter
A chave de partida soft starter tem a mesma lgica de alimentao de uma chave de partida
comum. preciso energizar a parte de fora da chave, onde esto os tiristores, e que o circuito que
alimenta o motor; como tambm a parte do comando, onde se tem as entradas digitais para
elaborao da forma de como ser acionada a chave. Uma chave soft starter, como visto, aps
partir um motor, dependendo do modelo, acionado o rel de by-pass dos tiristores (modo economia
de energia desativado) e a carga fica diretamente conectada a rede. Quando o by-pass feito
externamente, atravs de um contator, a mesma chave pode, atravs de uma lgica de comando,
partir e parar mais de um motor.
8.1.4.1 Soft Starter Partindo um nico motor
Figura 8.18 - Soft Starter Partindo um nico motor
87
8.1.4.2 Soft Starter Partindo Vrios Motores simultaneamente
Partidas simultneas
Neste tipo de partida a potncia da chave deve ser no mnimo igual a soma das potncias de
todos os motores. As cargas devem ter curvas de conjugado / rotao e momentos de inrcia
semelhantes.
Figura 8.19 - Starter Partindo Vrios Motores simultaneamente
Note que K2 est em paralelo com a chave, portanto, K2 o by-pass que feito com um contator
em paralelo com a chave.
88
8.1.4.3 Soft Starter Partindo Vrios Motores em Seqncia ou
Cascata
Partidas seqenciais
Para este tipo de partida a potncia da soft starter deve ser no mnimo igual potncia
nominal do maior dos motores. No havendo pausa entre as partidas dos motores deve-se especificar
a capacidade da soft -starter em base ao resultado da corrente eficaz. O ajuste de parmetros para
diferentes capacidade dos motores e/ou cargas pode ser realizado atravs do software de
comunicao da soft - starter. Permite-se a entrada de at trs diferentes jogos de parmetros. A
partida seqenciada pode atender motores de plos comutveis em suas diferentes rotaes.
Figura 8.20 - Starter Partindo Vrios Motores em Seqncia ou Cascata
89
Partida em seqncia de 3 motores
Figura 8.21 - Partida em seqncia de 3 motores com apenas uma soft - starter
90
8.1.4.4 Soft starter montada dentro do delta
Em alguns modelos h a possibilidade de instalao da soft-starter montada dentro do Delta
da ligao do motor. O motor tem suas fases ligadas na sada e na entrada da chave. Nem todo
modelo permite essa configurao de montagem, porm, uma soluo muito econmica. Dessa
forma a potncia necessria do soft-starter cai para raiz de 3 vezes menos em funo da mesma
carga. Isso significa que, no lugar de um soft-starter de 10 CV, podemos utilizar um de 10/ raiz de 3,
ou seja, 5,8 CV.
Figura 8.22 - Soft starter montada dentro do delta da ligao de um motor
91
8.2 - Inversor de freqncia
Os inversores de freqncia so usados sempre que h a necessidade de variar a velocidade
de um motor, direta ou inversamente proporcional, em funo do sistema de funcionamento de uma
mquina ou sistema. Os conversores de freqncia so equipamentos eletrnicos que fornecem total
controle sobre a velocidade de motores eltricos de corrente alternada atravs da converso das
grandezas fixas de uma rede de alimentao convencional (tenso e freqncia), em grandezas
variveis. Apesar do princpio ser o mesmo, houveram grandes mudanas entre os primeiros
conversores de freqncia e os atuais, devidas principalmente a evoluo dos componentes
eletrnicos com destaque aos tiristores e aos microprocessadores digitais. A eletrnica de potncia,
vem com o passar do tempo, tornando mais fcil (e mais barato) o acionamento de motores. Com isto,
sistemas que antes usavam motores CC, pela facilidade de controle, hoje podem usar motores CA de
induo graas aos inversores de freqncia, tambm chamados de conversores de freqncia. Em
paralelo com o avano da eletrnica de potncia, a microeletrnica, por meio de microprocessadores
e microcontroladores, tem auxiliado muito o acionamento de mquinas CA, em particular os
inversores de freqncia, com funes que possibilitam cada vez mais controlar uma gama maior de
variveis do motor. Os inversores de freqncia podem substituir, com vantagens, os sistemas de
controle de fluxo com vlvulas (bombas) ou dampers (ventiladores / exaustores). Vrios sistemas
produo utilizam basicamente motores eltricos e controladores. Nos sistemas convencionais os
controladores de vazo, presso e temperatura comandam vlvulas e/ou dampers de
estrangulamento, desperdiando a energia eltrica. Nos sistemas atuais, as vlvulas de
estrangulamento esto sendo substitudas por inversores de freqncia, acionando os motores
principais. A grande vantagem de utilizao de inversores que alm de gerar economia de energia
tambm reduz o custo de instalao do sistema. Os inversores variam as velocidades dos motores de
acordo com a maior ou menor necessidade de vazo ou presso ou temperatura de cada zona de
controle. Ao diminuir a velocidade, os inversores proporcionam grande economia de energia. Tal
efeito no ocorre, como por exemplo, com as vlvulas tradicionais onde a vazo reduzida, porm, o
motor continua operando na mesma velocidade - pressionando o fludo sobre a entrada da vlvula,
absorvendo a mesma potncia. Outra vantagem que se pode obter utilizando inversores de freqncia
a possibilidade de reduo dos custos de manuteno. Os inversores possibilitam que os motores
sejam acionados suavemente, sem trancos. Com isso, reduz-se a quebra de elementos de
transmisso como correntes e rodas dentadas, ocorrncias freqentes em virtude do esforo adicional
provocado pelos motores com partida direta.
92
8.2.1 - Princpio de funcionamento do inversor de freqncia
O princpio de funcionamento de um inversor de freqncia, est no fato de que a velocidade
sncrona de um motor funo da freqncia da rede de alimentao e do nmero de plos do motor.
O nmero de plos do motor imutvel para um motor com apenas um enrolamento por fase e por
ranhura, e funo caracterstica da montagem do motor. Como visto anteriormente, os motores
dahlander e os motores com mais de um enrolamento na armadura, variam de velocidade, mas pela
mudana de nmero de plos do motor, conforme a ligao feita. As variaes de velocidade so
sempre fixas e proporcionais ao nmero de plos. Quando h um motor com apenas um enrolamento,
o nmero de plos fixo, logo a rotao do motor tambm. Para esse motor, quando h a variao da
freqncia da rede de alimentao, h tambm a variao da velocidade do mesmo, proporcional a
variao da freqncia. Logo, o inversor de freqncia deve controlar a freqncia do sinal que
alimenta o motor.
Para conseguir fazer essa variao na freqncia da rede de alimentao, o inversor de
freqncia alimentado pela rede eltrica disponvel, que no caso do Brasil a freqncia da rede de
60Hz. Aps a entrada de alimentao (CA) no inversor a tenso retificada para tenso contnua
(CC). O sinal alternado conseguido para alimentar o motor feito atravs de uma tcnica chamada de
PWM, ou modulao por largura de pulso, que reconstri o valor de tenso na sada do inversor,
porm com uma freqncia definida pelo usurio que pode ser de 0Hz, a at (dependendo do modelo
e do fabricante) em torno de 500Hz.
93
8.2.1.1 Blocodiagrama de um inversor de freqncia
Figura 8.23 - Blocodiagrama de um inversor de freqncia
Um inversor de freqncia formado basicamente por quatro blocos distintos:
CPU
CPU - A CPU (unidade central de processamento) de um inversor de freqncia pode ser
formada por um microprocessador ou por um microcontrolador (CLP). Isso depende apenas do
fabricante. De qualquer forma, nesse bloco que todas as informaes (parmetros e dados do
sistema) esto armazenadas, visto que tambm uma memria est integrada a esse conjunto. A CPU
no apenas armazena os dados e parmetros relativos ao equipamento, como tambm executa a
funo mais vital para o funcionamento do inversor: gerao dos pulsos de disparo, atravs de uma
lgica de controle coerente, para os IGBTs.
IHM
O segundo bloco a IHM (Interface Homem Mquina). atravs desse dispositivo que se pode
visualizar (display) o que est ocorrendo no inversor, ou seja, supervisionar os estados e as variveis
pertinentes ao acionamento do motor , e configur-lo de acordo com a aplicao pelas teclas de
acesso, incremental e decremental.
94
Interfaces
A maioria dos inversores pode ser comandada atravs de dois tipos de sinais: Analgicos ou
digitais. Normalmente, quando se quer controlar a velocidade de rotao de um motor CA com
inversor, utiliza-se tenso, ou corrente, analgica de comando proporcional a uma varivel, como
presso, temperatura, vazo, velocidade referencial, etc. Essa tenso, ou corrente, situa-se entre 0 e
10 Vdc, no caso de tenso, e entre 0 a / ou 4 a 20 mA, no caso te corrente. A velocidade de rotao
(rpm) ser proporcional ao seu valor, por exemplo, com uma parametrizao linear:
1 Vdc = 1000 RPM, 2Vdc = 2000 RPM.
Para inverter o sentido de rotao basta inverter a polaridade do sinal analgico (de 0 a 10 Vdc
sentido horrio, e 10 0 Vdc sentido anti-horrio). Alm da interface analgica, o inversor possui
entradas digitais, com sinais de tenso, normalmente em 24 Vdc ou 220 Vac. Atravs da
parametrizao seleciona-se em uma lista, as possibilidades referentes funo de cada entrada
digital, tais como, ligar, habilitar, reset de erro, inverso do sentido de rotao, desliga, parada de
emergncia, entre outros
Etapa de potncia
A etapa de potncia constituda por um circuito retificador de onda completa, que alimenta
atravs de um circuito intermedirio chamado barramento DC ou link DC. A entrada de
alimentao no inversor em CA, provindo da rede de alimentao principal (60 ou 50Hz). Aps a
retificao de CA para CC feito uma filtragem na forma de onda retificada, atravs de capacitores
(as vezes com indutores tambm), para formar uma tenso CC mais linear, ou seja, diminuir o riplle.
Essa tenso CC alimenta o link DC onde esto instalados os mdulo de transistores do tipo IGBT,
onde a tenso DC , atravs do sistema PWM (Modulao da Largura de Pulsos) transformada
novamente em CA, mas com valores de freqncia ajustveis, conforme uma lgica de
funcionamento desenvolvido na parametrizao do inversor de freqncia, no qual ira alimentar o
motor
95
8.2.1.2 Princpio de funcionamento do inversor de freqncia
simplificada
Figura 8.24 - Princpio de funcionamento do inversor de freqncia simplificada
8.2.1.3 Etapa de retificao
A tenso CA provinda da rede de alimentao e transformada em tenso CC.
Figura 8.25 Etapa de Retificao
a) Retificao a partir de uma alimentao monofsica;
b) Retificao a partir de uma alimentao trifsica.
96
Etapa retificao completa
Figura 8.26 - Etapa retificao completa
Tenso CA da rede de alimentao retificada em tenso CC ondulada, atravs de um retificador
trifsico controlado com tiristores.
Etapa ps retificao ou filtragem
Nessa etapa feita uma reduo do teor de tenso CA na onda de tenso CC, ou seja,
diminuio do riplle.
Figura 8.27 - Etapa ps retificao ou filtragem
97
Etapa de inverso ou converso de tenso cc em tenso ca
O inversor
O inversor a ltima conexo do inversor de freqncia antes do motor e o ponto final onde a
adaptao da tenso de sada ocorre.
Do circuito intermedirio o conversor pode receber tanto:
Uma corrente contnua varivel
Uma tenso contnua varivel
Uma tenso contnua constante.
Em todos os casos o inversor assegura que a sada para o motor se torna varivel. Em outras
palavras, a freqncia para o motor gerada no inversor. Se a corrente ou tenso so variveis, o
inversor gera apenas a freqncia. Se a tenso constante o inversor gera a tenso e a freqncia.
Mesmo que os inversores trabalhem de formas diferentes, sua estrutura bsica sempre a mesma.
Os componentes principais so semi condutores controlveis, colocados em para em trs ramos.
Atualmente os tiristores tem sido largamente substitudos pelos transistores que podem ser
chaveados de forma mais rpida. Apesar de depender do tipo de semicondutor utilizado, a freqncia
de chaveamento esta tipicamente entre 300Hz e 20kHz. Os semi condutores no inversor so ligados e
desligados por sinais gerados no circuito de controle. Os sinais podem ser controlados de diversas
formas.
Figura 8.28 - Inversor Tradicional.
Inversores tradicionais, trabalhando principalmente com circuitos intermedirios de tenso
varivel, consistem de seis diodos, seis tiristores e seis capacitores. Os capacitores habilitam os
tiristores a chavear, de forma que a corrente esteja defasada 120 eltricos nas bobinas do motor e
devem ser adaptadas ao tamanho do motor. Um campo girante intermitente com a freqncia
desejada produzido quando os terminais do motor so excitados com corrente U-V, V-W, W-U, U-V
98
e assim sucessivamente. Mesmo que isso faa a corrente do motor quase quadrada, a tenso do
motor quase senoidal. Entretanto, sempre existem picos de tenso quando a corrente chaveada.
Os diodos isolam os capacitores da corrente de carga do motor.
Figura 8.29 - Inversor para tenso constante ou varivel e a sada que depende da freqncia de chaveamento dos
transistores.
Em inversores com circuitos intermedirios de tenso constante ou varivel existem seis
componentes chaveadores e independentemente do tipo de semicondutor utilizado, a funo
basicamente a mesma. O circuito de controle chaveia os semicondutores utilizando-se das mais
diversas tcnicas de modulao, mudando, dessa forma, a freqncia de sada do inversor. A
primeira tcnica trabalha com tenso ou corrente varivel no circuito intermedirio. Os intervalos em
que os semicondutores individualmente so conduzidos so colocadas numa seqncia que usada
para se obter as freqncias de sada desejada. Essa seqncia de chaveamento controlada pela
amplitude da tenso ou corrente do circuito intermedirio. Utilizando-se um oscilador controlado por
tenso, a freqncia sempre obedece a amplitude da tenso. Esse tipo de inversor chamado de
PAM (Pulse Amplitude Modulation ou Modulao por amplitude de pulso). A outra principal tcnica
usa um circuito intermedirio de tenso constante. A tenso no motor conseguida aplicando-se a
tenso do circuito intermedirio por perodos mais longos ou mais curtos.
Figura 8.30 - Modulao por amplitude e por largura de pulso.
99
A freqncia mudada atravs da variao dos pulsos de tenso ao longo do eixo do tempo
positivamente para meio perodo e negativamente por o outro meio. Como a tcnica muda a largura
dos pulsos de tenso, ela chamada de PWM (Pulse Width Modulation ou Modulao por Largura de
Pulso). PWM (e tcnicas relacionadas com ela como PWM controlada pelo seno) a tcnica mais
utilizada no controle dos inversores. Nas tcnicas PWM o circuito de controle determina os tempos de
chaveamento dos semicondutores atravs da interseco entre um tenso triangular e uma tenso
senoidal superposta (PWM controlada pelo seno).
O Circuito de Controle
O circuito de controle ou placa de controle do conversor de freqncia tem quatro tarefas
essenciais:
Controlar os semicondutores do conversor de freqncia.
Troca de dados entre o conversor de freqncia e os perifricos.
Verificar e reportar mensagens de falha.
Cuidar das funes de proteo do conversor de freqncia e do motor.
Os microprocessadores tm aumentado sua capacidade de processamento e velocidade,
aumentando significativamente o nmero de aplicaes possveis aos conversores de freqncia e
reduzindo o nmero de clculos necessrios a sua aplicao. Com os microprocessadores o
processamento integrado dentro do conversor de freqncia e este est apto a determinar o melhor
padro de chaveamento para cada estado de operao.
Caractersticas de torque do motor.
Se um inversor de freqncia fosse capaz de fornecer uma corrente muitas vezes maior que a
corrente nominal do motor, a sua caracterstica de torque seria como visto na figura a seguir. Mas
correntes dessa magnitude podem danificar tanto o motor como o conversor de freqncia.
Conseqentemente o conversor de freqncia indiretamente limita os valores de corrente atravs da
reduo da tenso e da freqncia. O limite de corrente varivel e garante que o motor no ficar
excedendo por muito tempo sua corrente nominal. Visto que o conversor de freqncia controla a
velocidade do motor independentemente da carga, possvel parametrizar diferentes limites dentro
da faixa de trabalho do motor.
As caractersticas de torque do motor esto dentro dos valores nominais para alguns tipos
conversores de freqncia. Entretanto, seria uma vantagem se o conversor permitisse que o torque
atingisse 160% do torque nominal por exemplo.
100
tambm normal que o inversor opere o motor numa velocidade acima da velocidade sncrona
como por exemplo 200% da velocidade nominal. O conversor de freqncia no consegue fornecer
uma tenso maior que a tenso de alimentao o que leva a um declnio da relao tenso -
freqncia se a velocidade nominal for excedida. O campo magntico enfraquece e o torque gerado
pelo motor cai na razo de 1/n.
Figura 8.31 - Torque e sobre-torque do motor
A corrente mxima de sada do conversor se mantm constante. Isso leva a uma potncia
constante de sada mesmo com velocidades acima de 200%.
Figura 8.32 - Performance do motor
101
8.2.1.4 Tipos usuais de modulaao da largura de pulso (pwm)
Princpio de funcionamento do pwm (modulao de largura de
pulsos)
Figura 8.33 - Princpio de funcionamento do pwm
Vantagens: sem rudo gerado pelo conversor; balano econmico.
Desvantagens: rudo eltrico do motor; qualidade do acionamento se f (HZ) menor de 5Hz;
O motor alimentado por uma onda de tenso de amplitude e freqncia variveis. Os pulsos de
tenso tm uma amplitude constante mas so recortados a fim de se obter a tenso mdia desejada.
Princpio de funcionamento do pwm senoidal (modulao de
largura de pulsos senoidal)
Figura 8.34 - Princpio de funcionamento do pwm senoidal
Vantagens: sem rudo do conversor; qualidade rotao; balano econmico.
Desvantagens: rudo eltrico do motor.
102
Forma de onda da tenso e corrente gerada por controle por pwm
analisando uma fase
Figura 8.35 - Forma de onda da tenso e corrente gerada por controle por pwm analisando uma fase
Forma de onda da tenso e corrente gerada por controle por pwm
analisando trs fases
Figura 8.36 - Forma de onda da tenso e corrente gerada por controle por pwm analisando trs fases
103
8.2.1.5 - Caractersticas dos conversores de freqncia pwm
Conversores estticos indiretos de freqncia com tenso imposta PWM so atualmente os
equipamentos mais empregados para a alimentao de motores de baixa tenso nas aplicaes
industriais que requerem variao de velocidade. Eles operam como uma interface entre a fonte de
energia (rede) e o motor de induo. O processo de obteno da tenso e freqncia desejadas por
meio de tais equipamentos passa por trs estgios:
Ponte de diodos - Retificao do sinal alternado - de tenso e freqncia constantes
proveniente da rede de alimentao;
Filtro ou Link DC - Alisamento/regulao da tenso retificada com armazenamento de energia
por meio de um banco de capacitores;
Transistores IGBT - Inverso da tenso contnua proveniente do link DC num sinal alternado,
com tenso e freqncia variveis.
O diagrama a seguir ilustra as etapas descritas acima
Figura 8.37 - Caractersticas dos conversores de freqncia pwm
Observaes:
Quando o motor est em vazio ou com cargas leves, a tenso n o link DC tende a estabilizar
no valor igual a .
Quando, porm, o motor est com cargas mais elevadas (por exemplo, plena carga), a tenso no
link DC tende ao valor .
104
8.2.2 Tipos de inversor de freqncia
Os inversores de freqncia so construdos basicamente de duas maneiras.
a) Com circuito intermedirio: h a etapa de retificao da onda de alimentao em CC, e aps
h a reconstruo da forma de onda da alimentao novamente em CA, com valores de freqncia
ajustveis. H os que podem ser alimentados por uma rede mono ou bifsica, e sada trifsica, como
os que so alimentados por uma rede trifsica e sada trifsica.
b) Sem circuito intermedirio: no h a etapa de retificao, h apenas a reconstruo da
forma de onda da alimentao novamente em CA, com valores de freqncia ajustveis. Esse
inversor j alimentado em CC, num valor de tenso em torno de 400Vdc, que a tenso mdia no
link DC da maioria dos inversores fabricados, por isso no h a necessidade de converter CA CC
CA, o que o torna mais leve e menos volumoso do que o inversor com circuito intermedirio, por no
haver os diodos retificadores nem o capacitor, que normalmente possui um considervel volume.
Dentre os dois tipos de inversores, o mais usual hoje so os inversores com circuito
intermedirio, pois a rede de alimentao distribuda em CA. Porm o uso do inversor sem circuito
intermedirio esta cada vez mais se difundido, pois, os inversores por trabalharem em valores de
freqncia diferentes (at 500Hz) da freqncia fundamental (50 ou 60Hz), geram rudos
(harmnicos) na rede de alimentao que prejudicam o funcionamento e diminui a vida til de outros
equipamentos que esto alimentados na mesma rede, o que atenuado com o uso do inversor sem
circuito intermedirio, pois o mesmo alimentado por uma fonte CC, que funciona como um filtro. Os
inversores com circuito intermedirio, como visto acima, podem ser alimentados tanto por uma rede
mono ou bifsica, entre 200 a 240 Vac, e sada trifsica tambm com valores de tenso entre 200 a
240 Vac, como por uma rede de alimentao trifsica, entre 200 a 500 Vac, e sada trifsica entre 200
a 460 Vac.
105
Figura 8.38 - Inversores com alimentao mono ou bifsica e sada trifsica
Figura 8.39 - Inversores com alimentao trifsica e sada trifsica
106
8.2.3 - Aplicaes e ligaes feitas com o inversor de freqncia
Figura 8.40 - Ligao da fora num inversor de freqncia com alimentao mono ou bifsica
107
Figura 8.41 - Ligao das entradas e sadas digitais, ligao das entradas analgicas, suas funes e caractersticas
Figura 8.42 - Exemplo de ligao do comando num inversor de freqncia
108
8.2.4 - Controle de velocidade de um motor trifsico alimentado por
um inversor de freqncia
8.2.4.1 Definio de sistemas de Controle
Controle em Malha Aberta: um Sistema de Controle em Malha Aberta (SCMA) utiliza um
controlador conectado em srie com o processo a ser controlado, de modo que a entrada do processo
deve ser tal que sua sada se comportar como desejado. A caracterstica importante que a ao de
controle independe da sada.
Observe-se que um sistema de controle deste tipo fornecer a sada desejada se no ocorrerem
perturbaes externas que alterem o valor da sada ou alteraes paramtricas internas do sistema.
Se alguma destas ocorrer, a sada muda, mas a ao de controle continua exatamente a mesma.
Controle em Malha Fechada: um Sistema de Controle em Malha Fechada (SCMF) utiliza uma
medida adicional da sada (resposta) real afim de compar-la com a resposta desejada do sistema.
O SCMF tambm chamado Servomecanismo. O termo servomecanismo era originalmente
empregado para denotar uma classe de sistemas de controle para os quais a referncia era
constante. Atualmente o termo servomecanismo usado em sentido amplo, significando Sistema de
Controle em Malha Fechada (SCMF). No entanto, usa-se ainda a expresso problema de
servomecanismo em conexo com o objetivo de seguir uma referncia constante e problema de
rastreamento, em conexo com o objetivo de seguir uma referncia que varia com o tempo. Embora o
conceito SCMA (sistema de controle em malha aberta) seja usado, sistemas de controle reais so
essencialmente de malha fechada. Isto leva definio geral de sistemas de controle.
Sistema de Controle: um sistema que tende a manter uma relao pr-estabelecida entre
duas variveis do sistema atravs da comparao de funes destas variveis e utilizando a diferena
como meio de controle.
109
8.2.4.2 Modos de controle do Inversor de Freqncia
Basicamente existem dois tipos de controle dos conversores eletrnicos: o escalar e o vetorial.
O controle escalar baseia-se no conceito original do conversor de freqncia: impe no motor
uma determinada tenso/freqncia, visando manter a relao V/f constante, ou seja, o motor
trabalha com fluxo aproximadamente constante. aplicado quando no h necessidade de respostas
rpidas a comandos de torque e velocidade e particularmente interessante quando h conexo de
mltiplos motores a um nico conversor. O controle realizado em malha aberta e a preciso da
velocidade funo do escorregamento do motor, que varia em funo da carga, j que a freqncia
no estator imposta. Para melhorar o desempenho do motor nas baixas velocidades, alguns
conversores possuem funes especiais como a compensao de escorregamento (que atenua a
variao da velocidade em funo da carga) e o boost de tenso (aumento da relao V/f para
compensar o efeito da queda de tenso na resistncia estatrica), de maneira que a capacidade de
torque do motor seja mantida. O controle escalar o mais utilizado devido sua simplicidade e devido
ao fato de que a grande maioria das aplicaes no requer alta preciso e/ou rapidez no controle da
velocidade.
O controle vetorial possibilita atingir um elevado grau de preciso e rapidez no controle do torque
e da velocidade do motor. O controle decompe a corrente do motor em dois vetores: um que produz
o fluxo magnetizante e outro que produz torque, regulando separadamente o torque e o fluxo. O
controle vetorial pode ser realizado em malha aberta (sensorless) ou em malha fechada (com
realimentao).
Com sensor de velocidade requer a instalao de um sensor de velocidade (por exemplo, um
encoder incremental) no motor. Este tipo de controle permite a maior preciso possvel no controle da
velocidade e do torque, inclusive em rotao zero.
Sensorless mais simples que o controle com sensor, porm, apresenta limitaes de torque
principalmente em baixssimas rotaes. Em velocidades maiores praticamente to bom quanto o
controle vetorial com realimentao. As principais diferenas entre os dois tipos de controle so que o
controle escalar s considera as amplitudes das grandezas eltricas instantneas (fluxos, correntes e
tenses), referindo-as ao estator, e seu equacionamento baseia-se no circuito equivalente do motor,
ou seja, so equaes de regime permanente. J o controle vetorial admite a representao das
grandezas eltricas instantneas por vetores, baseando-se nas equaes espaciais dinmicas da
mquina, com as grandezas referidas ao fluxo enlaado pelo rotor, ou seja, o motor de induo visto
pelo controle vetorial como um motor de corrente contnua, havendo regulao independente para
torque e fluxo.
Como visto h duas formas usuais de controlar a velocidade de um motor acionado por um
inversor de freqncia.
110
a) Controle Sensorless ou Controle em Malha aberta: controle onde feito uma estimativa da
velocidade do motor, segundo o nmero de plos do motor, a corrente absorvida pelo motor
(fornecida pelo inversor), tenso fornecida ao motor, a freqncia em que est sendo alimentado o
motor, entre outras variveis. o mtodo mais simples, onde a freqncia e a tenso so ajustadas
de forma a manter a relao V/F constante, ou seja, fluxo aproximadamente constante para manter o
torque constante. um tipo de controle em malha aberta. O seu sucesso depende do tipo de carga
que o motor aciona, principalmente da curva de conjugado de carga (constante, linear, quadrtico,
etc). o tipo de acionamento usado onde no h fortes aceleraes e desaceleraes envolvidas,
tambm em funo da carga.
Controle em malha aberta da velocidade de um motor CA
Figura 8.43 - Controle em malha aberta da velocidade de um motor CA
a) Modelo ideal para controle em malha aberta;
b) Modelo equivalente para controle em malha aberta.
111
Controle de velocidade de um motor ca em malha aberta
(sensorless)
Figura 8.44 - Controle de velocidade de um motor ca em malha aberta (sensorless)
Controle de velocidade em malha aberta ou controle sensorless
Figura 8.45 - Modo do controle de velocidade em malha aberta Controle Vetorial
112
b) Controle com Encoder ou Controle em Malha fechada: controle onde a velocidade do
motor controlada e ajustada a partir de um feedback da velocidade de rotao do eixo do motor. O
controle em malha fechada, utiliza um encoder ou um resolver acoplado diretamente no eixo do
motor, ou atravs de um flange entre o motor e a carga. O sinal gerado pelo encoder (tacogerador)
exatamente a mesma velocidade desenvolvida no eixo do motor. Esse sinal reenviado ao
controlador (realimentado), ou seja, enviado a uma entrada do inversor de freqncia para encoder,
normalmente analgica com resoluo entre 8 a 12 bits. O sinal gerado pelo encoder comparado
com o sinal de referncia para velocidade do motor. O sinal de referncia para velocidade do motor
criado por um algoritmo de controle do inversor para essa finalidade segundo uma srie de grandezas
e variveis tais como o nmero de plos do motor, a corrente absorvida pelo motor (decomposta em
Id e Iq) fornecida pelo inversor, tenso fornecida ao motor, a freqncia em que est sendo
alimentado o motor, entre outras variveis. A partir dessa comparao, o erro (diferena) entre o sinal
de referncia do inversor e o sinal gerado pelo encoder, compensado com um sinal resultante, de
maneira a diminuir o erro. Isso quer dizer que com a compensao do sinal, o erro entre o sinal de
referncia do inversor tender sempre a ser igual ao sinal gerado pelo encoder, fazendo com que o
controle da velocidade seja extremamente o mais fiel com aquilo desejado para o funcionamento da
mquina. Sempre que se necessite de um ajuste fino da velocidade de um motor CA, sendo o mesmo
alimentado por um inversor de freqncia, deve-se utilizar um inversor que possua entrada para
realimentao, pois esse item no disponvel em todos modelos e verses de inversores.
Controle em malha fechada da velocidade de um motor CA
Figura 8.46 - Controle em malha fechada da velocidade de um motor CA
a) Modelo ideal para controle em malha aberta;
b) Modelo equivalente para controle em malha aberta.
113
Controle de velocidade de um motor ca em malha fechada
(encoder)
Figura 8.47 - Controle de velocidade de um motor ca em malha fechada (encoder)
Controle de velocidade em malha fechada ou controle com encoder
Figura 8.48 - Inversor de freqncia com realimentao de velocidade proporcionada atravs do sinal gerado pelo
encoder, e com sinal de posicionamento gerado por um resolver
114
8.2.5 - Parametrizao do inversor de freqncia
A parametrizao consiste em ajustar os parmetros segundo as variveis do motor e o modo
como o conjunto motor / carga / mquina / sistema ira atuar. Dependendo do modelo e do fabricante
da chave soft starter, pode ser parametrizada das seguintes maneiras.
b) Via software dedicado: esse modo de parametrizao feito atravs da porta de
comunicao serial (RS-232 OU RS-485) do inversor de freqncia que conectado a uma porta de
comunicao de um computador ou a uma rede (switch). preciso, no entanto, possuir instalado no
computador o software de programao fornecido pelo fabricante, e, que o software tenha atualizado
os drives referentes a chave que se quer parametrizar, com a verso de firmware referente ao
programa instalado no inversor de freqncia. Esses dados vm impressos numa etiqueta colada no
inversor, como tambm, etiquetado em cima do processador do inversor de freqncia. Com o
software de parametrizao, tambm possvel, alm de parametrizar o inversor, supervisionar, em
tempo real, estando o inversor on-line com o computador, seja diretamente ou atravs de uma rede,
as variveis referentes ao funcionamento e comportamento do inversor como tambm do motor, tais
como, valor de corrente do motor, valor de tenso aplicada ao motor, freqncia na sada do inversor,
tenso no link DC, estado do inversor (habilitada - ready, em funcionamento run, ou em falha
fault), entre outros.
Figura 8.49 - Parametrizao do inversor de freqncia via IHM
115
c) Via IHM ou HMI: a parametrizao via IHM o mtodo mais usual de se parametrizar um
inversor de freqncia. Normalmente essa parametrizao via IHM se faz em campo, ou seja, no local
onde est instalado o inversor, seja num CCM dentro de uma sala onde se encontram os QGBTs, ou
num CCM prximo a carga a ser acionada. Os inversores de freqncia tambm possuem uma porta
de comunicao, mas nem sempre possvel comunicar com uma rede ou computador, devido ao
local onde se encontra a chave. As parametrizaes feitas no local via porta de comunicao
normalmente so feitas com um laptop, e nem sempre se tem um a disposio para tal. Para
parametrizar o inversor via IHM deve se ter o manual do mesmo com a descrio detalhada de cada
parmetro, assim como em alguns casos, o parmetro de desbloqueio, ou, acesso aos parmetros
que se deseja modificar, em funo sempre da carga acionada.
IHM (interface homem-mquina) de um inversor de
freqncia. Para efetuar a parametrizao preciso
acessar o manual do inversor e realizar a
parametrizao atravs das teclas da IHM.
Figura 8.50 - Parametrizao do inversor via IHM
116
IX - A PROTEO CONTRA CHOQUE NA
NBR 5410
A proteo contra choque que visa impedir que uma pessoa ou animal domstico estabelea
contato involuntrio com alguma parte da instalao eltrica que esteja em potencial que seja
perigoso para a sua integridade fsica, este potencial pode ser originado tanto de uma parte da
instalao que est energizada para o seu funcionamento normal, quanto de uma parte que foi
acidentalmente energizada. Uma instalao eltrica tem que ser segura, ter a devida proteo tanto
em situao de funcionamento normal quanto em uma situao de falta.
A proteo contra choques deve considerar os seguintes elementos da instalao eltrica
partes vivas, massas e elementos condutores estranhos instalao. A proteo contra choque que
visa impedir o acesso s partes vivas da instalao chamada de proteo contra choque por contato
direto. A proteo que visa impedir o choque eltrico a partir de parte condutora da instalao que
normalmente no esta energizada, mas que se tornou energizada com um potencial perigoso
normalmente devido a um defeito na isolao bsica de um componente conhecida como proteo
contra choque por contato indireto.
A base tcnica para as prescries de proteo contra choque nas normas brasileiras o
relatrio IEC 479-1 que trata dos efeitos do choque eltrico no corpo humano. Portanto realizar a
proteo contra choques, no mbito das normas baseadas nesta filosofia, manter as partes
acessveis das instalaes dentro dos limites estabelecidos pela IEC 479-1. A proteo contra
choques, portanto, independe do valor da tenso nominal da instalao, dependendo somente da
suportabilidade do corpo humano ao choque.
Figura 9.1 Tipos de Contato
117
Figura 9.2 - Efeito fisiolgico da corrente no corpo humano.
9.1 O Socorro s Vtimas
Respirao assistida
O mtodo boca-a-boca o mais eficiente.
Perfurao da traquia
Quando no se consegue desenrolar a lngua a traquia deve ser perfurada para permitir a
respirao sem uso da boca ou nariz.
Massagem cardaca
Presso ritimada sobre o trax, combinada com respirao assistida pode manter a circulao
sangnea (irrigando o crebro) enquanto no chega socorro mdico.
Desfibrilao
Um aparelho denominado desfibrilador gera pulsos de corrente (produzidos por um capacitor)
que so aplicados por dois eletrodos colocado no trax de modo que parte desses pulsos passem
pelo corao. Podem ser feitas vrias tentativas com valores crescentes dos pulsos, combinados com
massagem cardaca.
As queimaduras
So tratadas em clnicas especializadas, mas quando a extenso muito grande geralmente
resultam namorte da vtima. As queimaduras mais graves so as provocadas pelo arco eltrico, pela
alta temperatura (alguns milhares deC.)
118
9.2 - Dispositivos DR
9.2.1 Proteo complementar contra contatos diretos:
Circuitos que sirvam a pontos situados em locais contendo banheira / chuveiro (exceto circuitos
que
alimentem pontos de luz com h > 2,5m);
Circuitos que alimentem tomadas de corrente em reas externas;
Circuitos de tomadas de corrente em reas internas que possam alimentar equipamentos no
exterior;
Circuitos de tomadas de corrente de cozinhas, copas-cozinhas, lavanderias, reas de servio,
garagens e, no geral, a todo local interno molhado em uso normal ou sujeito a lavagens (podem ser
excludas as tomadas destinadas a alimentar refrigeradores e congeladores, desde que no
diretamente acessveis).
9.2.2 Funo Dispositivos DR
Protegem pessoas contra os efeitos nocivos causados por choques eltricos, por deteco da
corrente de fuga e desligamento imediato;
Protegem tambm instalaes contra falhas de isolao, evitando perdas de energia e
possveis focos de incndio;
Faixas de corrente de 25, 40, 63 e 125A para correntes de fuga de 30 e 500mA em
220/380VCA;
Compatveis com a exigncia da norma NBR 5410/1997;
Fixao rpida por engate sobre trilho;
Acessrios: Contatos auxiliares 1NA + 1NF (dependendo do fabricante)
Atendem ao Sistema N - modular standard.
119
Figura 9.3 Dispositivos DR
Dispositivo DR - Dispositivo que interrompe a corrente de carga quando a corrente diferencial
residual atinge um determinado valor.
Corrente Diferencial Residual - a soma algbrica dos valores instantneos das correntes que
percorrem todos os condutores vivos de um circuito em um dado ponto.
Figura 9.4 Corrente diferencial-residual
9.2.3 Princpio de Funcionamento
A corrente diferencial residual de um circuito sem defeito de isolamento seja na carga seja
nos condutores, zero. Este valor ideal, pois por imperfeio dos materiais isolantes de que so
usados na fabricao dos condutores e das isolaes bsicas das cargas existe uma pequena
corrente diferencial residual natural.
O dispositivo DR um componente da instalao que secciona a alimentao da carga ou
circuito quando a corrente diferencial residual ultrapassa um determinado valor. Para que o DR
120
cumpra esta funo o dispositivo construdo de tal forma que todos os condutores vivos do circuito
passe por dentro de um toroide no interior deste dispositivo. Cada condutor induz um fluxo magntico
no toride com uma intensidade proporcional intensidade da corrente e sentido proporcional ao
sentido da corrente.
Pode-se facilmente concluir que o fluxo resultante no toride proporcional corrente diferencial
residual do circuito. O dispositivo DR usa este fluxo, atravs de um sistema de deteco, para
comandar um dispositivo de interrupo que secciona a alimentao do circuito.
Como em um circuito sem falta a corrente diferencial residual muito baixa praticamente nula o
dispositivo no atua quando no circuito aparece uma falta, a corrente diferencial assume um valor alto
e conseqentemente o fluxo magntico tambm aumenta, o sistema de deteco envia um comando
para o dispositivo de interrupo que isola a parte com defeito.
Figura 9.5 Corrente de Fuga ocasionado por Falha de Isolao do Equipamento Contato Indireto
Figura 9.6 Princpio de Funcionamento dos DRs
121
O DR pode ser encontrado em duas formas diferentes de implementao. Quando o sistema de
deteco, incluindo o toride, e o sistema de interrupo encontram-se presentes no mesmo
equipamento denominado dispositivo DR.
Quando o sistema de deteco, incluindo o toride, e o sistema de interrupo encontram-se em
equipamentos distintos, o sistema de interrupo da corrente usado normalmente o disjuntor e o DR
um mdulo que se acopla a este disjuntor. A primeira opo usada nas instalaes prediais e a
segunda nas instalaes industriais.
9.2.4 Tipos de DRs
AC - Apenas corrente alternada;
A - Corrente alternada e pulsante;
B - Alternada, pulsante e CC pura.
Os Dispositivos DR ou Disjuntores DR de corrente nominal residual (In ) at 30 mA, so
destinados a proteo de pessoas, e, acima deste valor, so apropriados a proteo de instalaes
eltricas. Dispositivos DR ou Disjuntores DR do tipo AC so aplicados em circuitos de corrente
alternada, sendo resistentes sobretenses transitrias. So normalmente utilizados em instalaes
eltricas prediais, como tambm em instalaes eltricas industriais de caractersticas similares. Os
do tipo A (antigo B) so aplicados em circuitos de corrente alternada e contnua pulsante, sendo
fortemente resistentes s acentuadas sobretenses transitrias tpicas das grandes instalaes
eltricas industriais. Dispositivos DR de corrente nominal residual (In) de 10 mA, so utilizados em
circunstncias especiais, como, por exemplo, para proteo de pessoas que sofreram intervenes
cirrgicas delicadas,como a correo de distrbios cardacos. Para projetos tpicos com circuitos de
entrada e de distribuio, podem ser utilizados os Dispositivos DR que atuam de forma seletiva, o que
permite que seja desligada somente a parte da instalao que apresente falha.
Dispositivo DR seletivo de caracterstica S, tem um retardo de disparo conforme prescrito pela
norma IEC 1008. Para uma corrente nominal residual de 30 mA, o Dispositivo DR seletivo de
caracterstica K, tem seu disparo retardado em 10 ms acima dos valores normais de atuao, o que
permite uma seletividade fina e adequada proteo de pessoas.
Os Disjuntores DR, alm da proteo contra correntes de fuga terra, protegem as instalaes
eltricas das correntes de sobrecarga e curto-circuito. So aplicados Dispositivos DR ou Disjuntores
DR normalmente nas configuraes de rede TN-S (Fase/PE) e TT (Fase/N/PE).
Dispositivos DR obedecem a norma IEC 1008 e os Disjuntores DR a IEC 1009.
122
9.2.5 Mdulo DR
O mdulo DR um componente da instalao que detecta a corrente diferencial residual e
comanda a interrupo no disjuntor. Esta opo dada sempre em disjuntores industriais, que
seguem a norma NBR 60947-2. A interrupo ocorre no disjuntor, logo a capacidade de interrupo
do conjunto definido pela capacidade de interrupo do disjuntor.
O mdulo DR (Diferencial-Residual) foi concebido para ser montado posteriormente no disjuntor
pelo cliente. A combinao de disjuntor alguns modelos de disjuntores e mdulo DR pode ser
alimentada tanto pelo lado superior como pelo inferior.
Alguns disjuntores com mdulo DR podem ser fornecidos com blocos de contatos auxiliares e de
alarme, bobina de mnima tenso e bobina de desligamento distncia, sendo sua montagem
dependente dos acessrios j existentes no disjuntor. O mdulo DR detecta a presena de correntes
diferenciais / residuais dentro dos sistemas de distribuio.
9.2.4 Aplicao
Proteo de pessoas em redes TT, IT e TN (ajuste I_n = 30mA, td instantneo). Proteo de
instalaes e equipamentos contra sobrecarga ou contra danos causados por faltas terra (proteo
de falta terra). O mdulo DR se vale de uma soma vetorial de todas as correntes de fase, acionando
o trip do disjuntor quando a corrente de falta terra ultrapassa os valores ajustados de corrente de
atuao e de tempo de retardo.
9.2.5 Principais Caractersticas para Selecionar DR
In (A)
In (mA ou A)
Un (V)
Iint (A ou kA)
f (Hz)
N plos
123
Dispositivos DRs Tipo AC
Bipolares - Sensibilidade 30 e 300 mA " 25A, 40A, 63A e 80A;
Tetrapolares - Sensibildade 30, 300 mA " 25A;
Tetrapolares - Sensibilidade 30, 300 e 500 mA " 40A, 63A, 80A, 125A e 125A
(selet. S);
Acessrios dependendo do fabricante (Tipo AC / A) " Contato auxiliar 1NA + 1NF;
Dispositivos DR . Tipo A
Bipolares - Sensibilidade 10 mA " 16A;
Tetrapolares - Sensibilidade 30 mA " 40A (selet. K), 40A, 63A, 80A e 125A;
- Sensibilidade 300 mA " 63A (selet. S), 160A;
- Sensibilidade 500 mA " 63A, 125A, 160A, 224A;
9.3 Interruptor Diferencial
um dispositivo de interrupo de corrente de carga e que incorpora um DR. Este dispositivo
precisa ter a montante um DPCC ; disjuntor ou fusvel.
Figura 9.7 Interruptor Diferencial
124
9.4 Disjuntor Diferencial Seletivo
Para poder coordenar com outros dispositivos a corrente residual de disjuntores DRs em srie
em um circuito, estes dispositivos dispem de um retardo curto de tempo.
Figura 9.8 Disjuntor Diferencial Seletivo
125
9.5 Ligao dos Dispositivos de Proteo por
Corrente Residual
Figura 9.9 Como Ligar no Esquema TN
Figura 9.10 Como Ligar no Esquema TT
126
9.6 Boto de Teste
Obrigatrio por norma; Verificao peridica do funcionamento.
Figura 9.11 Funcionamento de um Boto de Teste de um DDR
127
9.7 Montagem dos Dispositivos DRs em Quadros de
Distribuio
Montagem de um DR na entrada Montagem de dois DRs por setor
Figura 9.12 Quadro Metlico
Montagem de dois DR.s por setor
Figura 9.13 Quadro Plstico
128
X - ESPECIFICAES E DADOS DE
ENCOMENDA DE COMPONENTES E
DISPOSITIVOS
Ao adquirir um equipamento / componente / dispositivo, sempre nos defrontamos com o que
precisamos conhecer para adquirir corretamente? Dentro do objetivo de colocar na mo dos
profissionais, dados prticos concretos, relacionamos a seguir, dentro do escopo desse texto, os
dados necessrios, caso a caso, relacionando inicialmente os dados sempre necessrios.
Dados gerais ( sempre definidos )
Temperatura no local da instalao ............................................................... ____ oC
Fator de correo aplicvel por temperaturas superiores .............................. 0, ..
Altitude no local da instalao......................................................................... ____ m
Fator de correo por altitudes superiores ..................................................... 0, ..
Instalao ao ar livre ou protegido................................................................... tempo / abrigada
Umidade no local ............................................................................................ ____ %
Componentes agressivos no local da instalao............................................ ________
Grau de proteo devido as condies anteriores ......................................... IP ___
Necessidade de pintura especial devido as condies anteriores.................. ________
Valor calculado da corrente de curto-circuito presumida ............................... ____ kA
Tipo de carga ...................................................................................... resistiva/capacitiva /indutiva
Posio de montagem (qualquer / horizontal / vertical / inclinadas) ............. ________
Dimenses (desenhos com dimenses) ou (largura/altura/profundidade)............................. __ mm
Peso .............................................................................................................. ____ kg
Dados Especficos
Disjuntores
Tenso nominal mxima ......................................................................... ____ V
Corrente mxima de interrupo Icu ou Ics / Tenso de rede ................ ____ kA / ____ V
Corrente nominal mxima / Temperatura ambiente ................................ ____ A / ____ oC
Nmero de plos ..................................................................................... ____ plos
Rel disparador de sobrecarga ............................ no _, sim _ fixo _ ajustvel ____ a ____ A
Rel disparador de curto-circuito ......................... no _, sim _ fixo _ ajustvel ____ a ____ A
129
Seccionador
Tenso nominal mxima ...................................................................... ____ V
Corrente nominal / Categoria de emprego ........................................... ____ A AC-___ ou DC-___
Proteo de curto-circuito - fusvel ( tipo / corrente nominal ) ................. Tipo____ / ____ A
Fusvel
Tenso nominal mxima ......................................................................... ____ V
Corrente mxima de interrupo / Tenso de rede ................................. ____ kA / ____ V
Corrente nominal / Tamanho ................................................................... ____ A tamanho ____
Contator de potncia
Tenso nominal mxima ......................................................................... ____ V
Corrente nominal / Categoria de emprego .............................................. ____ A AC-___ ou DC-___
Tenso de comando / Freqncia .......................................................... ____ V / ____Hz
Contatos auxiliares ( Quantidades / Execuo ) ..................................... ____ NA + ___NF
Rel de sobrecarga
Tenso nominal mxima ......................................................................... ____ V
Faixa de ajuste ........................................................................................ ____ a ____ A
Contatos auxiliares ( Quantidades / Execuo ) ..................................... ____ NA + ___NF
Contator auxiliar
Tenso nominal mxima ......................................................................... ____ V
Corrente nominal / Categoria de emprego .............................................. ____ A AC-___ ou DC-___
Tenso de comando / Freqncia .......................................................... ____ V / ____Hz
Contatos auxiliares ( Quantidades / Execuo ) ..................................... ____ NA + ___NF
130
BIBLIOGRAFIA
SCHMELCHEN, Theodor. Manual de Baixa tenso: informaes tcnicas Parra aplicao de dispositivos de
manobra, comando e proteo. 1 edio
Siemens S.A. Nobel, So Paulo, 1988.
DAWES, Chester L. Curso de Eletrotcnica. 13 edio. Editora Globo. Porto Alegre, 1976.
WEG, Acionamentos. Informaes Tcnicas. Comando e proteo para motores Eltricos. Jaragu do Sul, 1990.
A. Capelli. Eletrnica para Automao. Antenna Edies Tcnicas, Rio de Janeiro, 2004.
Automao Industrial Editora: rica Autor: Ferdinado Natale;
Automao Aplicada Editora: rica Autor: Marcelo Georgini
Cadernos Tcnicos da Siemens do Brasil;
Cadernos Tcnicos da Allen-Bradley;
Cadernos Tcnicos da WEG do Brasil;
Cadernos Tcnicos da Schneider Electric do Brasil;
You might also like
- Mini - Disjuntores - WEG PDFDocument6 pagesMini - Disjuntores - WEG PDFNercival Buschieri JuniorNo ratings yet
- Aula Sobre Nova NBR 5419 2015 PDFDocument23 pagesAula Sobre Nova NBR 5419 2015 PDFBruno SanchesNo ratings yet
- Manutenção Elétrica Industrial de A - TDocument37 pagesManutenção Elétrica Industrial de A - TCrislane AndradeNo ratings yet
- Catalogo VerinDocument8 pagesCatalogo VerinAmanda KaizerNo ratings yet
- Padrão de Entrada 08.2021Document86 pagesPadrão de Entrada 08.20213256230788No ratings yet
- Manutenção Com A Linha EnergizadaDocument6 pagesManutenção Com A Linha Energizadajsousa_338509No ratings yet
- AterramentoDocument37 pagesAterramentoJuliana Neuwald Piva100% (1)
- Segurança em Instalações Elétricas - NR10Document22 pagesSegurança em Instalações Elétricas - NR10RONALDO BATISTA DE ALMEIDA LAPANo ratings yet
- Manutenção Elétrica Industrial - Motores ElétricosDocument17 pagesManutenção Elétrica Industrial - Motores ElétricosMauricio Machado GonçalvesNo ratings yet
- Tecnicas de Inspecao Ensaios Cabos EletricosDocument198 pagesTecnicas de Inspecao Ensaios Cabos Eletricosfabianoxyll100% (1)
- Apostila - EletrotécnicaDocument37 pagesApostila - EletrotécnicaFredcrdguiNo ratings yet
- Instalacaçao Eletrica Predial IVANOELDocument20 pagesInstalacaçao Eletrica Predial IVANOELivanoel cardoso100% (1)
- Encar - de Elétrica - Instalações EletricasDocument38 pagesEncar - de Elétrica - Instalações EletricasCezardeBarrosNo ratings yet
- Aula 1 - Introdução A FundaçõesDocument17 pagesAula 1 - Introdução A FundaçõesMateus BrasilinoNo ratings yet
- ET-E-410 Centro Controle Motores Baixa Tensao CCM-BT Rev 8Document26 pagesET-E-410 Centro Controle Motores Baixa Tensao CCM-BT Rev 8Ricardo100% (1)
- Coordenação de Elos Fusíveis e Suas ConseqüênciasDocument13 pagesCoordenação de Elos Fusíveis e Suas ConseqüênciasFelipe FrancoNo ratings yet
- Relés de ImpulsoDocument2 pagesRelés de ImpulsolelasiaromNo ratings yet
- Teste Isolação Motores WEG PDFDocument17 pagesTeste Isolação Motores WEG PDFRodrigo CorintoNo ratings yet
- O Forno MicroondasDocument43 pagesO Forno MicroondasJosias RochaNo ratings yet
- Catálogo Elétrico 1697 - PT2 - 9 - Ed - 160908Document16 pagesCatálogo Elétrico 1697 - PT2 - 9 - Ed - 160908alvarocezarNo ratings yet
- 108-Dimensionamento de CircuitosDocument12 pages108-Dimensionamento de CircuitosClubedoTecnicoNo ratings yet
- Ebook - Método 4TDocument55 pagesEbook - Método 4TElton Caldas De QueirozNo ratings yet
- WEG Quadros Eletricos 50029502 Catalogo Portugues BRDocument40 pagesWEG Quadros Eletricos 50029502 Catalogo Portugues BRestevaomoraesNo ratings yet
- 3 - Eletrotécnica e Eletrônica Aplicada 1aDocument97 pages3 - Eletrotécnica e Eletrônica Aplicada 1aEdson AugustoNo ratings yet
- Manual Baterias Cral EstacionariaDocument30 pagesManual Baterias Cral EstacionariazaracualNo ratings yet
- NR 10 Firjan PDFDocument114 pagesNR 10 Firjan PDFCezardeBarrosNo ratings yet
- Sistema de AterramentoDocument41 pagesSistema de AterramentoLuizNo ratings yet
- Guia Prático para Instalações Elétricas ResidenciaisDocument119 pagesGuia Prático para Instalações Elétricas ResidenciaisDeyvid Dacoregio100% (1)
- Manutenção em Cabine PrimariaDocument4 pagesManutenção em Cabine PrimariaMeraki Engenharia & Meio AmbienteNo ratings yet
- Análise TécnicaDocument121 pagesAnálise TécnicaAmaury Berteli100% (1)
- Ebook Instalacoes Eletricas 2020Document80 pagesEbook Instalacoes Eletricas 2020joão cândido100% (1)
- N-2277 Teste de Isolação e Continuidade Elétrica de CircuitoDocument4 pagesN-2277 Teste de Isolação e Continuidade Elétrica de CircuitoLuiz Salim100% (1)
- Eletricista Montador - Fund. Eletromagnetismo e Equipamentos Elétricos - ProminpDocument220 pagesEletricista Montador - Fund. Eletromagnetismo e Equipamentos Elétricos - ProminpWandencolk CoêlhoNo ratings yet
- WEG Paineis Eletricos 50029502 Catalogo PTDocument72 pagesWEG Paineis Eletricos 50029502 Catalogo PTLucas DalmolinNo ratings yet
- JNG Catálogo 2016.2017 Geral - Comprimido PDFDocument188 pagesJNG Catálogo 2016.2017 Geral - Comprimido PDFtecnicoeem33% (3)
- Levantamento de Carga CCM EtaDocument4 pagesLevantamento de Carga CCM EtaJoão VictorNo ratings yet
- Projecto de Sistema Solar TérmicoDocument137 pagesProjecto de Sistema Solar TérmicoRFNo ratings yet
- Diagramas Elétricos - Mundo Da ElétricaDocument4 pagesDiagramas Elétricos - Mundo Da ElétricaantoniobalanNo ratings yet
- Termotécnica - NBR 5419-2015Document72 pagesTermotécnica - NBR 5419-2015GETULIO VICENTE VIEIRA MENEZESNo ratings yet
- Ensaios de Cabos ElectricosDocument10 pagesEnsaios de Cabos ElectricosAlberto FolhentoNo ratings yet
- 10 NBR 5419 2015Document35 pages10 NBR 5419 2015Nickolas LevyNo ratings yet
- Diagrama UnifilarDocument1 pageDiagrama UnifilarMarcio CunhaNo ratings yet
- Trabalho NR10 - 10.7 e 10.8Document44 pagesTrabalho NR10 - 10.7 e 10.8Richard Rosso Pereira100% (1)
- PDFDocument24 pagesPDFDanielColdebellaNo ratings yet
- Page 19Document1 pagePage 19cccortizoNo ratings yet
- Manual de Montagem de Estruturas de Fixacao - Bel EnergyDocument16 pagesManual de Montagem de Estruturas de Fixacao - Bel EnergyEnergia Solar e ElétricaNo ratings yet
- Manual de Instrução para Operação Com Geradores de Energia ElétricaDocument10 pagesManual de Instrução para Operação Com Geradores de Energia ElétricaFelipe NascimentoNo ratings yet
- 15 1 33 Navegacao Aerea Balizamento NoturnoDocument24 pages15 1 33 Navegacao Aerea Balizamento NoturnoGabriele da SilvaNo ratings yet
- 492 Prominp Continuacao Nr10 Aplicacao Pratica e Riscos EletricosDocument128 pages492 Prominp Continuacao Nr10 Aplicacao Pratica e Riscos EletricosLeandro S SilvaNo ratings yet
- NR-10 ComentadaDocument31 pagesNR-10 Comentadarodrigocarvalholuz0% (1)
- Calculo de Queda de TensãoDocument4 pagesCalculo de Queda de TensãoAnderson AtanásioNo ratings yet
- Manual Aterramento ElétricoDocument18 pagesManual Aterramento Elétricoomegaengenhariayahoo.com.brNo ratings yet
- Informando O Consumo De Energia Por Rs232 Via Protocolo Pima Programado No ArduinoFrom EverandInformando O Consumo De Energia Por Rs232 Via Protocolo Pima Programado No ArduinoNo ratings yet
- Suporte Basico de Vida Pediatrico 2011Document33 pagesSuporte Basico de Vida Pediatrico 2011Vinicius BaltazarNo ratings yet
- Comentários Moreira CónegosDocument3 pagesComentários Moreira Cónegosmethos40No ratings yet
- Reg Distribuicao Agua DrenagemDocument25 pagesReg Distribuicao Agua Drenagemmethos40No ratings yet
- Torque ValuesDocument1 pageTorque Valuesmethos40No ratings yet
- Apsi Versao DgsDocument77 pagesApsi Versao Dgsmethos40No ratings yet
- Folheto AguaDocument2 pagesFolheto Aguamethos40No ratings yet
- Livro ReceitasDocument51 pagesLivro ReceitasMoara CorreaNo ratings yet
- Guia de Ambiente - EDP DistribuiçãoDocument32 pagesGuia de Ambiente - EDP DistribuiçãoJoão Pedro CanelasNo ratings yet
- Eletricista Montador - Interpretacao de Projetos EletricosDocument38 pagesEletricista Montador - Interpretacao de Projetos EletricosRocago100% (14)