Professional Documents
Culture Documents
CURS Gps
Uploaded by
seitan_calinOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
CURS Gps
Uploaded by
seitan_calinCopyright:
Available Formats
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 1
1. SISTEMUL DE POZITIONARE GLOBAL - GPS
GPS reprezint de fapt o parte din denumirea NAVSTAR GPS . Acesta este acronimul de la
NAVIGATION System with Time And Ranging Global Positioning System.
Proiectul a fost demarat de catre guvernul Statelor Unite la nceputul anilor 70. Scopul principal
l reprezint posibilitatea de a putea determina cu precizie pozitia unui mobil n orice punct de pe
suprafata pamntului, n orice moment indiferent de starea vremii.
GPS este un sistem care utilizeaza o constelatie de 30 de sateliti pentru a putea oferi o pozitie
precis unui utilizator. Precizia trebuie nteleas n functie de utilizator. Pentru un turist aceasta
nseamna n jur de 15 m, pentru o nav n ape de coasta reprezint o mrime de circa 5 m, iar pentru un
geodez precizie nseamna 1 cm sau chiar mai putin.
GPS poate fi utilizat pentru a obtine preciziile cerute n toate aplicatiile pomenite mai sus,
singurele diferente constnd numai n tipul receptorului si a metodei de lucru utilizate.
Initial GPS a fost proiectat numai pentru aplicatii militare. Curnd dupa ce acest obiectiv a fost
atins a devenit evident ca GPS va putea fi folosit si pentru scopuri civile pstrnd totusi anumite
proprietti numai pentru domeniul militar. Primele doua aplicatii civile au fost navigatia maritim si
msurtorile tereste.
Dup lansarea primului satelit artificial al Pmntului, Sputnik 1, la 04.10.1957, tehnica spatial
s-a impus ca o nou er n dezvoltarea stiintific si tehnologic, constituind un factor dinamizator al
procesului tehnicoeconomic, n domenii de interes major ale activittii umane.
Domeniile de utilizare ale satelitilor artificiali specializati snt numeroase si deosebit de
diversificate, printre acestea, de o deosebit important strategic n domeniul militar si de larg utilitate
n domeniul civil fiind dezvoltarea tehnologiilor satelitare de navigatie care permit pozitionarea deosebit
de precis a mijloacelor de transport aeriene, maritime si terestre aflate n miscare sau n repaus.
Aceast tehnologie si-a gsit, deasemenea, o larg aplicabilitate si n domeniul geodeziei si
geodinamicii prin realizarea unor retele geodezice la nivel global sau national, contributii la
determinarea formei si dimensiunilor Pmntului si a cmpului su gravitational, determinarea
deplasrilor plcilor tectonice, etc.
La ora actual functioneaz n paralel dou sisteme de pozitionare global, respectiv sistemul de
pozitionare NAVigation Satellite Timing And Ranging Global Positioning System(NAVSTAR GPS),
cunoscut sub denumirea GPS, realizat si gestionat de Statele Unite ale Americii si sistemul de
pozitionare GLObal NAvigation Satellite System(GLONASS), realizat si gestionat de Federatia Rus.
Cele dou sisteme sunt asemntoare din punct de vedere al conceptiei, al modului de
functionare si al performantelor ce le ofer utilizatorilor, lucrarea urmnd a face referiri numai la
sistemul american, GPS.
1.1 Componentele sistemului
Sistemul de pozitionare global GPS s-a pus n miscare ncepnd cu anul 1973, sub coordonarea
Joint Program Office din cadrul U.S. Air Force Commands, Los Angeles Force Base, fiind la origine
un sistem de pozitionare realizat n scopuri si pentru utilizare militar, care a devenit n scurt timp
accesibil si sectorului civil, captnd o utilizare extremde larg n multe tri ale lumii, inclusiv n tara
noastr dup 1992.
Acest sistem de pozitionare global functioneaz pe principiul receptionrii de ctre utilizator a
unor semnale radio emise de o constelatie de sateliti de navigatie, specializati, care se misc n jurul
Pmntului pe orbite circumterestre.
Sistemul a fost astfel proiectat nct permite ca n orice moment si oriunde pe suprafata
Pmntului, un mobil aflat n miscare sau n repaus, s aib posibilitatea ca utiliznd un echipament
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 2
adecvat, s si poat stabili n timp real pozitia si viteza de deplasare pentru un mobil aflat n miscare si
numai pozitia pentru un mobil aflat n repaus, ntr-un sistem de coordonate geocentric tridimensional,
propriu sistemului de pozitionare GPS.
Sistemul de pozitionare GPS, este constituit din trei componente sau segmente principale
(Fig.1.1), care asigur functionarea acestuia, dup cum urmeaz:
1. Segmentul spatial, constituit din constelatia de sateliti GPS;
2. Segmentul de control, constituit din statiile de la sol, care monitorizeaz ntregul sistem;
3. Segmentul utilizatorilor, compus din utilizatorii civili si militari, care folosesc receptoare
GPS dotate cu anten si anexele necesare;
1.1.1 Segmentul spatial
Constelatia de sateliti GPS a fost proiectat s contin n faza final un numr de 24 de sateliti
(actualmente functioneaz un numr de 30 sateliti), amplasati pe orbite aproximativ circulare fat de
suprafata Pmntului.
Planurile orbitale ale satelitilor au o nclinatie de 55
0
fat de planul ecuatorial terestru, stelitii
evolud la o altitudine de cca. 20200km., cte 4 sateliti n fiecare dintre cele 6 planuri orbitale.
Fiecare satelit face o rotatie complet n jurul Pmntului n 12 ore siderale, respectiv n 11 ore
si 56 de minute locale, zilnic rsritul si apusul fiecrui satelit fcndu-se cu 4 minute mai devreme.
Fiecare satelit are o durat de functionare estimat la cca.7 ani, durat care n general a fost depasit,
asigurndu-se astfel o sigurant n plus n exploatarea sistemului.
Segmentul spatial, care n prezent este complet, asigur ca la orice ora, n orice loc pe suprafata
Pmntului, indiferent de conditiile meteorologice, de perioada din zi sau din noapte, s se poat
receptiona semnale radio de la minimum 4 sateliti dar si mai multi, 6 sau 8, sub un unghi de elevatie de
15
0
deasupra orizontului, conditii absolut necesare pentru pozitionare.
Principalele functiuni ale segmentului spatial al sistemului si ale fiecrui satelit n parte pot fi
sintetizate astfel:
- satelitii GPS transmit permanent informatii utilizatorilor prin intermediul unor semnale radio
n frecventa nominal fundamental de 10.23 MHz, din care se genereaz cele dou unde
purttoare L1=1575.42MHz si L
2
=1227.60MHz l, timpul generat de ceasurile atomice,
efemeridele satelitului, starea echipamentelor auxiliare si alte informatii necesare;
- mentin o referint de timp foarte precis, prin intermediul cesurilor de la bordul satelitilor
GPS;
- receptioneaz si nmagazineaz informatiile primite de la segmentul de control;
execut manevre de corectare a orbitelor satelitare;
Satelitii sistemului au fost lansati la diferite perioade de timp si apartin diferitelor block-uri,
dup cum urmeaz:
- satelitii din BlockI snt primii sateliti lansati, modelul spatial fiind compus din 3 planuri
orbitale nclinate la 63
0
fat de planul ecuatorului. Lansarea celor 11 sateliti proiectati s-a
efectuat n perioada 1978-1985;
- satelitii din Block-I I au fost organizati n 6 planuri orbitale nclinate la 55
0
fat de ecuator
si au nceput s fie lansati n perioada 1989-1995. Satelitii acestui bloc se deosebesc de
satelitii primului block prin faptul c acestia au semnalul n totalite disponibil pentru
utilizatorii civili, au implementate tehnicile de protectie ale sistemului, SA (Selective
Availability) si AS (Anti-Spufing) si dispun de 4 ceasuri atomice (2 cu Cesiu, 2 cu Rubidiu);
- satelitii din Block-I I A (Advanced), snt mai evoluati n sensul c au posibilitatea s
comunice ntre ei si au montate reflectoare laser care permit msurtori de tipul Satelite
Laser Ranging (SLR). Au fost lansati ncepnd cu sfrsitul anului 1990;
- satelitii din Block-I I R (Relenishment) ncep s nlocuiasc satelitii din Block-ul II, dup
1996. Acestia snt prevzuti cu ceasuri atomice cu hidrogen, de tip MASER, care au au
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 3
stabilitate superioar fat de cele cu Cesiu sau Rubidiu. De asemenea acestia dispun de
legturi intersatelitare care permit ameliorarea preciziei de determinare a orbitelor satelitilor;
- satelitii din Block-I I F (Follow on) continu lansrile n perioada 2001-2010. Acestia vor
putea gestiona eventualele variatii ale frecventei de baz si vor dispune la bord de Sisteme de
Navigatie Inertial (INS);
Fig. 1.1 Constalatii de sateliti
Fig.1.2 - Statiile de control ale sistemului GPS
1.1.2 Segmentul de control
Segmentul de control al sistemului GPS este constituit din statiile specializate de la sol care
actualmente sunt n numr de cinci si sunt dispuse aproximativ uniform n jurul Pmntului, n zona
ecuatorial (Fig.1.2).
Principalele sarcini ale segmentului de control, sunt urmatoarele:
- segmentul de control urmreste permanent prin statii de la sol satelitii sistemului, prelucrnd
datele receptionate n vederea calculrii pozitiilor spatio-temporale ale acestora ( efemeride),
care apoi snt transmise la sateliti;
- controleaz ceasurile satelitilor comparndu-le cu un ceas atomic cu hidrogen, de tip
MASER;
- calculeaz corectiile orbitale, care sunt transmise la fiecare satelit si operate de motoarele
rachet proprii de corectare a orbitei;
- activeaz prin comenzi de la sol, la momentul dorit sau necesar, sistemele de protectie SA
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 4
(Selectiv Availability) si AS (Anti Spoofing), ale sistemului;
- stocheaz datele noi receptionate de la sateliti;
- calculeaz efemeridele prognozate (Broadcast) pentru urmtoarele 12 sau 24 de ore pe care
le transmite la segmentul spatial;
- execut ntregul control asupra sistemului;
Cele 5 statii la sol care formeaz segmentul de control al sistemului de pozitionare GPS au
urmtoarele clasificri si atributii:
statia de control principal (Master Control Station), amplasat la Colorado Springs n Statele
Unite, centralizeaz datele receptionate de la sateliti de statiile monitoare de la sol, prelucreaz aceste
date pentru prognozarea orbitelor satelitilor (efemeridelor), si execut calculul corectiilor acestora
precumsi ale ceasurilor, date, care apoi se transmit la statiile de control ale sistemului pe care acestea le
ncarc la segmentul spatial, sub o forma care constituie mesajul de navigatie, receptionat de utilizatori;
statiile monitor ale segmentului de control sunt amplasate dup cum urmeaz: insula Hawai
(estul oceanului Pacific), insula Kwajalein (vestul oceanului Pacific), insula Diego Garcia (vestul
oceanului Indian) si insula Ascension (oceanul Atlantic). Fiecare dintre aceste statii mpreun cu statia
principal receptioneaz permanent semnalele de la satelitii vizibili, inregistreaz datele meteorologice
si parametrii ionosferici pe care le transmit pentru prelucrare la statia principal;
statiile de control la sol, amplasate lng statiile monitor din insula Kwajalein, insula Diego
Garcia si insula Ascension si care de fapt sunt antene la sol cu ajutorul crora se realizeaz legtura
permanent cu satelitii sistemului si prin care se transmit efemeridele, corectiile orbitelor si ale
ceasurilor atomice, precum si alte date necesare bunei functionrii a sistemului.
Pentru calculul efemeridelor precise, necesare n special prelucrrii msurtorilor GPS cu utilizare
n geodezie-geodinamic, se folosesc msurtori si de la alte cinci statii terestre.
1.1.3 Segmentul utilizatori
Acest segment e constituit din totalitatea utilizatorilor detintori de receptoare GPS cu anten, n
functie de calittile receptorului si antenei, rezultnd acuratetea preciziei de pozitionare sau a
elementelor de navigatie. Receptoarele geodezice sunt receptoarele cele mai precise si opereaz cu
lungimile de und purttoare L
1
si L
2
precum si codul C/A sau P.
Dac la nivelul anului 1990 existau cca. 9000 de utilizatori GPS, la nivelul anului 2000 se
estimau cca. 500000 utilizatori GPS care pe grupe mari de activitti reprezentau urmtoarele cifre si
procente[NGS 1994]:
navigatia maritim si fluvial 225000 receptoare 45%
navigatie si transport terestru 135000 receptoare 27%
navigatia aerian 80000 receptoare 16%
utilizatori militari 35000 receptoare 7%
geodezie si cartografie 25000 receptoare 5%
1.1.4 Structura semnalului
Acuratetea sistemului de pozitionare GPS este asigurat de faptul c toate componentele
semnalului satelitar sunt controlate de ceasuri atomice.
Satelitii GPS din Block II prin ceasurile atomice de la bord, 2 cu cesiu si dou cu rubidiu,
asigur o stabilitate pe perioad ndelungat de 10
-12
10
-14
secunde.
Satelitii din Block IIR, dotati cu ceasuri atomice MASER, cu hidrogen, asigur pe perioad
ndelungat o stabilitate echivalent cu 10
-14
10
15
secunde.
Aceste ceasuri atomice, de foarte mare precizie, asigur realizarea unei frecvente fundamentale
f
0
= 10.23 Mhz, n banda L.
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 5
Avnd n vedere faptul c lungimea de und este dat de relatia:
f
v
= i (1.1)
unde: v = c = 299 792 458 m/s (viteza luminii n vid)
f
0
= 10.23 * 10
8
Hz (1.2)
rezult:
m 30
10 23 . 10
10 99792458 . 2
6
8
~
-
-
= i (1.3)
Frecventa fundamental f
0
, este la originea a trei prti fundamentale ale semnalului transmis
de satelitii GPS si anume:
- componenta portant, care contine cele 2 unde sinusoidale L
1
si L
2
;
- componenta activ, care contine 2 coduri numite C/A si P ;
- componenta mesaj, care contine codul D;
Cele dou unde porttoare, sunt generate prin multiplicarea frecventei fundamentale cu 154,
pentru L
1
si respectiv 120, pentru L
2
. Frecventele si lungimile de und rezultate au urmtoarele valori:
cm 19 Mhz 1575.42 f
1
L
~ = = =
1
L
0
f
c
f 154 : L
1
(1.4)
cm 24 Mhz 1227.60 f
2
L
~ = = =
2
L
0
f
c
f 120 : L
2
(1.5)
Sistemul a fost proiectat cu dou frecvente, conditie teoretic indispensabil pentru eliminarea
diverselor cauze de manifestare ale unor erori, cum ar fi erorile sistematice care au ca efect imediat
ntrzierea semnalului radio emis de satelitii GPS, datorat n principal erorilor generate de efectele
erorii de ceas, refractiei ionosferice, troposferice, etc.
Determinarea distantei de la satelit la receptorul GPS terestru, esential pentru pozitionarea
acestuia, este indispensabil legat de determinarea, ct mai precis, a timpului de propagare al undei de
la satelit la receptor, msurtoare care se realizeaz cu ajutorul codurilor generate de un algoritm cu
periodicitate n timp, care moduleaz frecventele portantelor.
Aceste coduri supranumite pe acest motiv pseudo-cazuale sau PRN(Pseudo Random Noise)
sunt utilizate sub urmatoarele denumiri:
300m 1.023Mhz f C/A
C/A
~ = = =
C/A C/A
0
c/f /10 f : codul n) Acquisitio (Coarse (1.6)
30m Mhz 10.23 f P
P P
~ = = =
P 0
c/f f : codul ) (Precision (1.7)
Codul C/A este liber pentru utilizatorii civili si moduleaz numai lungimea de und portant L
1
.
Acest cod se repet la fiecare milisecund si furnizeaz informatii privind identificarea satelitului
receptionat.
Codul P este codul rezervat utilizatorilor militari precum si altor utilizatori privilegiati si
moduleaz lungimile de und ale portantelor L
1
si L
2
decalate cu /2, decalaj care se repet sptmnal.
Codul D reprezint codul de navigatie, are o frecvent f
D
=f
0
/204800 = 50 Hz, care contine
informatiile privitoare la efemeridele satelitilor si parametrii reali pentru calculul pozitiei lor, starea
acestora si informatii privind ceasurile de la bord.
Receptoarele de mici dimensiuni, utilizate exclusiv pentru navigatie, receptioneaz numai
codurile C/A si D si asigur o pozitionare absolut n precizia de +/- 100m.
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 6
Complexitatea semnalului GPS este deosebit si ea poate fi motivat de o serie de conditii pe
care trebuie s le asigure, printre care putem aminti:
- sistemul de pozitionare GPS, este n primul rnd un sistem militar, fiind ns utilizat de un
numr mare de utilizatori civili si militari, pe care trebuie s i pozitioneze mai mult sau mai
putin precis n functie de preocuprile si specificul activittii pe care o desfsoar,m precum
si n functie de receptoarele de care beneficiaz;
- utilizatorii care dispun de posibilitatea de msurare a codurilor, pot beneficia de
pozitionare n timp real, cu anumite date privind corectiile distantelor provenite de satatiile
permanente DGPS, amplasate n zonele costiere sau pe uscat, care transmit datele pentru
diversi utilizatori n formatul standardizat RTCM (Radio Tehnical Commiion for Maritim
Services Format);
- utilizatorii care pot msura fazele, pot realiza o pozitionare de precizie, pe care o obtin n
postprocesare;
- utilizatorii care dispun de receptionarea semnalului GPS n dou frecvente dispun de
posibilitatea de eliminare a erorilor sistematice, generate de efectul influentei refractiei
ionosferice si troposferice;
Actualmente este n discutie posibilitatea de implementare a unei a treia lungimi de und,
denumit L
5
, care s fie folosit exclusiv de utilizatorii civili [Cina 2000], realizndu-se astfel o
separare complect de utilizatorii militari ai sistemului GPS.
1.2 Pozitionarea cu ajutorul tehnologiei GPS
Ca problem practic, pozitionarea cu ajutorul tehnologiei GPS se realizez prin determinarea
distantelor dintre punctul de statie si satelitii GPS vizibili, matematic fiind necesare msurtori la
minimum 4 sateliti. Acest numr de sateliti este necesar pentru a ne putea pozitiona ct se poate de
precis, numai pe baza distantelor msurate la sateliti.
Dac am avea msurtori la un singur satelit si am cunoaste pozitia acestuia, cu o singur
distant, pozitia noastr n spatiu ar fi pe o sfer cu centrul n pozitia satelitului si cu raza, distanta
msurat.
Msurnd distante la doi sateliti pozitia noastr se mbuntteste, n sensul c ne aflm pe un
cerc generat de intersectia celor dou sfere care au n centru cei doi sateliti si n functie de distanta
dintre acestia, cercul nostru de pozitie are o raz mai mare sau mai mic. Pozitia noastr se
mbuntteste substantial n momentul n care avem msurtori si la un al treilea satelit, care deja ne
localizeaz n dou dou puncte din spatiu. Aceste dou puncte sunt date de intersectia ultimei sfere, cu
centrul n cel de al treilea satelit, cu cercul generat de primele doua sfere determinate. Sigur c n acest
moment putem, relativ usor, s ne stabilim punctul n care ne aflm, ns pentru a fi rigurosi este
necesar a patra msurtoare fat de un al patrulea satelit si atunci n mod cert puncul pozitionrii
noastre va fi unic.
Pozitionarea se realizeaz cu ajutorul retrointersectiei spatiale de distante, n sistemul de
referint, reprezentat de elipsoidul WGS84. Fat de coordonatele spatiale care definesc permanent
pozitia fiecrui satelit GPS (S
j)
, n acest sistem de referint, coordonatele spatiale ale oricrui punct de
pe suprafata Pmntului (P
i
) se pot determina cu deosebit precizie prin intermediul msurrii unui
numr suficient de distante de la satelitii receptionati de receptorul din punctul P.
Dup cum se poate vedea din Fig.1.3, vectorial, pozitia punctului P este rezolvat prin
determinarea vectorului de pozitie R:
+ =R r (1.8)
=r R (1.9)
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 7
Vectorul r , reprezint vectorul de pozitie al satelitului observat la momentul t, vectorul
reprezint vectorul distant de la punctul considerat la satelit, iar vectorul R rezultat din formula
(1.9), reprezint vectorul de pozitie al punctului P.
Distanta geometric (Fig.1.3) poate fi exprimat de relatia:
2 2 2
) ) ( ( ) ) ( ( ) ) ( ( ) (
i
j j j
i
j j
i
Z t Z Y t Y X t X t + + = (1.10)
Pozitionarea cu ajutorul tehnologiei GPS se poate face n diferite modalitti:
O
Y
X
Z
R
r
Pi
S
j
Fig.1.3 Vectorul spatial care se msoar
Pozitionare absolut: coordonatele punctului P sunt determinate intr-un sistem de pozitionare
global, msurtorile pentru determinarea coordonatelor spatiale ale punctului P fcndu-se cu dou
receptoare GPS, din care unul amplasat pe un punct care are deja coordonate tridimensionale
determinate ntr-un sistem de referint global (WGS84, ITRFxx, EUREF, etc).
Pozitionare relativ: sunt determinate diferentele de coordonate ntre dou puncte sau
componentele vectorului (baseline), ce uneste cele dou puncte stationate cu receptoare GPS. Prin
aceast modalitate se reduc sau se elimin erorile sistematice (bias), de care este afectat distanta dintre
cele dou puncte.
Pozitionare diferential: este asemntoare,ca procedeu, cu pozitionarea absolut cu deosebirea
c eroarea care afecteaz distanta de la satelit la receptor este calculat si aplicat n timp real, ca o
corectie diferential, dat de ctre receptorul care stationeaz pe un punct de coordonate cunoscute
(base), ctre receptorul care stationeaz n punctul nou.
Ca si la pozitionarea relativ, sunt eliminate sau diminuate erorile sistematice care afecteaz
msurtorile GPS.
Msurtorile GPS, n geodezie sau ridicri topografice, se pot executa prin dou metode
principale, care n functie de situatie, de aparatur, etc. au fiecare diferite variante:
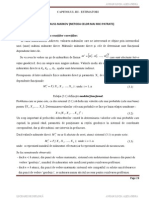
Metoda static care presupune msurtori cu dou sau mai multe receptoare GPS, amplasate pe
punctele care urmeaz s fie determinate si care sunt stationate, simultan, o perioad mai mare de timp,
denumit sesiune de observatii. Durata acesteia este stabilit n functie de lungimea laturilor, numrului
de sateliti utilizabili, de geometria segmentului spatial observabil, evaluat de PDOP (Position Dilution
of Precision), precum si de precizia de determinare a punctelor noii retele.
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 8
Metoda cinematic presupune msurtori cu dou sau mai multe receptoare, din care unul
amplasat pe un punct cu coordonate cunoscute (base) si restul recepoarelor sunt n miscare continu sau
cu stationri foarte scurte.
In functie de metoda de msurare (achizitie a datelor), coordonatele se pot obtine prin post-
procesare sau n timp real, situatie n care coordonatele sunt disponibile la teren.
In toate cazurile problema de baz este de a determina distanta (range) ntre receptor si satelitii
GPS, care se poate realiza prin dou dou tipuri de observatii:
Msurarea fazei codurilor din componenta activ a semnalului.
Msurarea fazei purttoarei semnalului (carrier phase).
Aceast a doua metod de realizare a msurtorilor GPS, prezint o important deosebit pentru
aplicarea acestei tehnologii n domeniul geodeziei.
1.2.1 Pozitionarea prin msurarea fazei codurilor
Aceast metod de determinare a timpului de zbor al semnalului, respectiv a intervalului de
timp necesar pentru parcurgerea de ctre semnalul emis de satelit, a distantei de la satelit la receptor, se
realizeaz utiliznd componenta semnalului continut de codul disponibil, respectiv C/A sau P.
Determinarea se realizeaz prin intermediul unui procedeu de corelare ncrucisat a dou
semnale, respectiv cel care soseste de la satelit la receptor si cel generat de receptor care este o replic
identic cu cea a satelitului care a emis-o, recunoscut de receptor prin intermediul secventei PRN,
numit si amprent a satelitului receptionat.
Aceste dou semnale sunt identice ntre ele dar, se gsesc decalate de timpul necesar pentru ca
semnalul s parcurg spatiul de la satelit la receptor (~ 20200km. n ~ 0.067 sec.).
Timpul de zbor At (Fig1.4), reprezint decalajul de timp necesar pentru ca replica generat de
receptor s se alinieze perfect cu semnalul transmis de satelit.
t
t r e c e p t o r
i
t s a t e l i t
j
Fig.1.4 Timpul care se msoar
Dac notm cu R
i
j
distanta considerat ntre satelitul j si receptorul i teoretic aceasta poate fi
obtinut cu ajutorul relatiei cunoscute:
, ) sec / km 458 , 792 . 299 c unde t c t R
j
i
= A = (1.11)
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 9
t
t = 0
( t )
i
( t )
j
j
t = 0
i
t a = 0
j
t
t
i
Fig.1.5 Origini de timp GPS
Distanta determinat n acest mod nu reprezint asa numita pseudodistant, deoarece
ceasurile receptorului si satelitului nu sunt sincronizate, ntre ele existnd o eroare de ceas (offset).
Considernd c n exemplul urmrit sunt trei origini de timp GPS, dup cum se poate vedea n
Fig.1.5, rezult:
- originea timpului atomic ta care se consider referint fundamental;
- originea timpului ceasurilor de pe satelit t
j
;
- originea timpului ceasului receptorului t
i
;
Reducnd toate originile de timp, la originea timpului atomic ta, relatia (1.11) devine:
, ) , ) , ) , ) , ) , ) , ) , ) t t t t c t t t t c R
i
j
i
j
i i
j j j
i
o o + = o + o + = (1.12)
, )
(
]
1
= o A + A t t c R
j
i
j
i
(1.13)
Ecuatia care exprim valoarea pseudodistantei la epoca t devine:
) t ( c ) t ( ) t ( R
j
i
j
i
j
i
o A + = (1.14)
Msurarea pseudodistantelor poate fi realizat numai prin utilizarea codurilor, deoarece numai
acestea pot da indicatii asupra momentului cnd marca de timp este emis de satelit si poate fi detectat
de receptor.
Dac se consider c toate ceasurile atomice de la bordul satelitilor sunt sincronizate, n aceast
ipotez, totusi, nu se poate ca s nu apar un decalaj ntre ele, decalaj care s aduc o eroare de ns (10
-
9
sec.), eroare care afecteaz distanta satelitreceptor, cu cca. 30cm.
Ceasurile receptoarelor GPS sunt ceasuri cu cuart, ceasuri a cror stabilitate n functionare este
mult mai mic, cu cteva ordine de mrime, dect ale ceasurilor atomice de la bordul satelitilor.
Se poate considera c si aceste ceasuri pot fi sincronizate dar cu o eroare de aproximativ o ms
(10
-3
sec.), eroare care ar afecta distanta satelit receptor cu cca.300 km.
Aceast valoare nu poate fi acceptat si pentru eliminarea ei se consider, ca necunoscut,
eroarea de ceas a receptorului, o
i
(t), la epoca de msurare. In aceste conditii, ecuatia care exprim
valoarea pseudodistantei, capt forma:
, ) , ) , ) , ) t c t t c t R
i
j
i
j j
i
o = o (1.15)
Ca n orice orice alt gen de msurtori geodezice, observatiile GPS, prin care se determin
pozitiile relative sau absolute ale unor puncte pe suprafata terestr, pot fi prelucrate prin metoda celor
mai mici ptrate.
Modelul matematic al prelucrrii se bazeaz pe conditia cunoscut, n care numrul de
observatii, este mult mai mare dect numrul de necunoscute.
Avnd n vedere cele dou metode principale de efectuare a observatiilor, respectiv metoda
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 10
static si metoda cinematic, n ambele cazuri numrul de observatii este dat de parametrii nj si nt ,
unde:
nj = numrul de sateliti receptionati;
nt = numrul de epoci receptionate de la fiecare satelit vizibil (receptorul, n timpul observatiilor
este n contact permanent cu toti satelitii si inregistreaz epocile msurate la anumite
intervalle de timp, de exemplu n msurtorile statice la interval de 15 sau 30 secunde, n
functie de tipul de msurtori care se execut);
In cadrul metodei statice de determinare a coordonatelor, cu ajutorul tehnologiei GPS,
receptoarele stationeaz pe punctele care urmeaz a fi determinate, pentru diverse epoci de msurare n
functie de preciziile de asteptat, necunoscutele fiind reprezentate de:
3 corectii, ce se calculeaz pentru cele trei coordonate tridimensionale ale fiecrui punct;
1 corectie pentru eroarea de ceas a fiecrui receptor pentru fiecare epoc, pentru un total de 3+nt
necunoscute;
Modelul matematic poate fi definit de relatia:
t t j
n 3 n n + > ) 16 . 1 (
n care:
1 n
3
n
j
t
> ) 17 . 1 (
Numrul minim de sateliti care conduc la o solutie este nj = 2 sateliti, care necesit un numr
minim de nt = 3 epoci de msurtori. Cu acest model este posibil o solutie instantanee de pozitionare,
unde cele 4 necunoscute sunt rezultatul fiecrei epoci generat de cel putin 4 sateliti.
Modelul care coincide cu nj = 2 sateliti si nt =3 sau nt > 3 epoci de msurtori, pentru metoda de
pozitionare static, teoretic este posibil .
In practic, totusi rezultatul nu este acceptabil din cauza unei conditii proaste de configurare a
sistemului de ecuatii de observatii care necesit epoci de msurare dispersate n timp, cum ar fi de
exemplu la anumite ore, pentru a asigura o conformatie geometric ct mai bun a constelatiei de sateliti
vizibili.
In timp ce receptorul achizitioneaz 3 epoci la un interval de cteva secunde, satelitul parcurge
ntr-adevr o portiune scurt de orbit, aceast situatie fiind comparabil cu o intersectie clasic cu o
baz foarte scurt n care rezultatele de asteptat sunt slabe.
O alt situatie posibil const n receptionarea a cel putin 3 epoci de msurtoare de la 2 sateliti,
mpreun cu cel putin 3 epoci de la alti 2 sateliti. Aceast situatie este de asemenea destul de rar, dar
este util n circumsante speciale, cum ar fi de exemplu masurtorile GPS n centrele urbane, unde
vizibilitatea la constelatia satelitar este obstructionat de constructii.
In cazul metodelor cinematice de determinare a coordonatelor punctelor, modelul de baz se
obtine direct din consideratiile date de miscarea receptorului si din numrul de coordonate necunoscute
ale statiilor care devine 3nt .Impreun cu cele nt necunoscute aferente corectiilor de ceas ale
receptoarelor, numrul de necunoscute ajunge la 4nt .
In acest caz modelul, definit de relatia (1.16) devine:
4 n care n n 4 n n
j t t j
> > (1.18)
In metoda cinematic, pozitia si viteza de deplasare a receptorelor mobile poate fi determinat n
timp real dac se obtin, simultan, msurtori de la cel putin aceeasi 4 sateliti.
1.2.2 Pozitionarea prin msurarea fazei undei purttoare mixate
Lungimea (range), receptor satelit, poate fi obtinut si prin msurarea fazelor portantelor L1 si
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 11
L2, metoda presupunnd urmrirea unui satelit j n lungul orbitei sale la o epoca initial t0 si
respectiv la o epoca oarecare t.
La momentul t0 distanta (range) de la satelitul j la receptorul i poate fi exprimat ca o
sum, dat de numrul ntreg de cicli ai undei de la satelit la receptor, plus o fractiune de lungime de
und, care exprim o fractiune de ciclu ntreg de lungime de und.
In realitate, aceasta este mrimea care se msoar, n timp ce numrul de cicli ntregi denumit
ambiguitate de faze, rmne ca o nou necunoscut pentru fiecare satelit observat.
Dac observatiile au nceput la epoca t0, la epoca t, satelitul a parcurs o portiune de orbit si
la noua msurtoare (epoc) a distantei de la satelit la receptor, se va msura fractiunea de ciclu ntreg
de lungime de und la momentul t si va apare necunoscuta aferent momentului t, pentru numrul
care va exprima ciclii ntregi de lungime de und, respectiv ambiguitatea la momentul t.
In acest caz, receptorul este n situatia de a determina fractiunea de ciclu ntreg dar nu si
ambiguitatea de faz, chiar dac aceasta se presupune c rmne la aceeasi valoare.
Dac se presupune c ambiguitatea rmne la aceeasi valoare trebuie mentinut contactul cu
satelitul ntre diferite epoci de msurare si pe urm continutul numrului ntreg de cicli se schimb
datorit miscrii relative a satelitului fat de receptor.
Pierderea contactului receptorului cu satelitul, generat n special de obstacole n calea
semnalului, supranumit cycle slip, provoac aparitia unei noi ambiguitti de faz, necunoscut care
apare la fiecare ntrerupere de semnal.
Continuare...
Cand al doilea satelit este observat, un al doilea set de
capete de unde or linii defaza este creat.
Punctul se afla undeva intr-una din aceste intersectii .
Adaugand un al treilea satelit
suplimentar, numarul de posibilitati devine mai strict.
Punctul se afla la una din intersectiile acestor linii de
faza .
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 12
Fig. 1.6. Stabilirea pozitiei receptorului functie
de numrul de sateliti vizibili
Modelul matematic de msurare de faze are deci urmtoarea expresie (Hofmann-Wellenhof
1992):
) t ( f N ) t (
1
j
i
j j
i
j
i
j
i
o A + +
= u (1.19)
unde:
u ) t (
j
i
- msuratoarea de faz, exprimat n cicli;
- lungimea de und;
j
i
- distanta geometric;
j
i
N - ambiguitatea de faz (numr ntreg de lungimi de und), independent de t;
j
f - frecventa semnalului de la satelit;
j
i
o A - combinatii ale erorilor de ceas ale satelitului j si ale receptorului i.
Fcnd substitutiile oferite de combinatiile erorilor de ceas, n relatia (1.19), rezult:
) t ( f N ) t (
1
) t ( f ) t (
i
j j
i
j
i
j j j
i
o +
= o u (1.20)
n care produsele f *o reprezint contributiile erorilor de ceas ale satelitului si ale receptorului.
Utiliznd notatiile folosite pn acum, numrul de observatii este de asemenea generat de
produsul dintre nj, numrul de sateliti vizibili si nt, numrul de epoci nregistrate de la fiecare
satelit, n conditiile n care numrul de necunoscute se majoreaz cu nj necunoscute ale ambiguittilor
de faz, respectiv cte o necunoscut pentru fiecare satelit.
In cazul pozitionrii GPS prin metoda static, pentru un punct singular modelul este dat de
relatia:
t j t j
n n 3 n n + + = (1.21)
unde:
1 n
3 n
n 3 n ) 1 n ( n
j
t
t j j t
+
> + > (1.22)
Numrul minim de sateliti necesari, pentru ca sistemul s admit o solutie este ca
nt = 2 sateliti, care necesit minimum nt = 5 epoci de msurare.
Si n acest caz, ceea ce s-a spus despre msurtoarea cu cod este valabil n sensul c, aceast
Adaugand un al patrulea satelit suplimentar,
numarul de posibilitati devine strict .
Odata cu modificarile constelatiei satelitilor
Cea mai probabila solutie se va afla in jurul unui punct .
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 13
solutie nu este practic utilizabil din cauza unor conditii geometrice dificil de realizat.
Alte solutii ntregi se pot obtine pentru urmtoarele cazuri:
epoci 2 n sateliti 5 n
epoci 3 sateliti 4 n
t j
t j
n
> =
> =
(1.23)
In cazul pozitionri GPS, prin metode cinematice pentru un punct singular, utiliznd msurarea
fazei undei purttoare mixate, considernd 3nt necunoscute aferente la cele trei coordonate ale punctelor
stationate de receptoarele care se deplaseaz (rovere), modelul de baz este dat de relatia:
j t t j
n n 4 n n + > (1.24)
unde:
4 n
n
n n ) 4 n ( n
j
j
t j j t
> > (1.25)
Numrul minim de sateliti care admit obtinerea unei solutii este nj = 5 sateliti, fapt ce presupune
un minimum de epoci de msurare nt = 5 epoci, dar este posibil s se obtin solutii ntregi si n alte
configuratii, cum ar fi:
epoci sateliti
epoci 3 n sateliti 6 n
2 n 8 n
t j
t j
> =
> =
(1.26)
Este de consemnat c, solutia cinematic pentru nt=1 nu este posibil n cazul sistemului de
pozitionare prin msurarea fazei undei purttoare mixate.
In consecint, pozitionarea cinematic cu msurare de faz e posibil numai dac cele nj
necunoscute ale ambiguittii de faz sunt cunoscute cu ajutorul procedurii tehnice numiteinitializare,
fr de care metodele cinematice nu pot functiona.
Cunoscnd ambiguittile, modelul distante rezultate din msurtori de faze, din punctul de
vedere al raportului necunoscute / ecuatii de erori, este echivalent cu modelul distante rezultate din
msurtori de coduri.
1.3 Erori ale msurtorilor efectuate cu tehnologia GPS
Precizia msurtorilor de pozitionare sau de navigatie,efectuate cu ajutorul tehnologiei GPS,
este dependent de precizia cu care se determin distanta (range) de la satelit la receptor.
Erorile care se pot comite n acest gen de msurtori sunt de dou tipuri:
1. Erori accidentale de msurare si de observare, cum ar fi eroarea datorat parcursurilor
multiple (multipath), electronica aparaturii de la bordul satelitului si ale
receptoarelor, interferentele electromagnetice, excentricitti ale centrilor de faz ale
antenelor, etc;
2. Erori sistematice (bias), cum ar fi erorile datorate ceasurilor de pe satelit si receptor,
erorile de refractie cauzate de troposfer si ionosfer, erorile datorate orbitelor
satelitare, etc;
Aceste erori sunt permanent prezente n cadrul msurtorilor, separat de acestea existnd si alte
erori induse cu bun stiint de cei ce gestioneaz sistemul de pozitionare GPS si care, chiar dac nu
actioneaz permanent, au ca scop degradarea preciziilor de pozitionare si navigatie n timp real, actiune
numit Disponibilitate Selectiv si Anti-furt, n englez Selective Avillability - SA si Anti-
spoofing - AS.
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 14
Tinnd cont de diferitele surse de eroare, constatm c pozitionarea absolut efectuat cu
ajutorul msurtorilor de cod s-ar situa ca precizie de pozitionare planimetric n jurul valorii de cca. +/-
100 m.
Dac aceste erori sunt tolerabile, n cazul aplicatiilor privind calculul vitezei de deplasare a unui
mobil sau pozitionarea acestuia, pentru scopurile geodezice si geodinamice aceste precizii sunt
intolerabile si n acest sens analizarea erorilor, a cauzelor care le produc, precum si a metodelor de
nlturare sau diminuare a acestora, este strict necesar.
1.3.1 Erorile accidentale
Potrivit unor reguli din literatura de specialitate, precizia de determinare cu ajutorul tehnologiei
GPS poate fi estimat acoperitor, ca avnd valoarea de cca. 1% din lungimea de und.
Aceast apreciere conduce la precizii diferite potrivit cu diversele observabile care sunt luate n
considerare, dup cum urmeaz:
- codul C/A: precizia = 1% = 1%*300m = +/- 3m
- codul P : precizia = 1% = 1* 30m = +/- 0.3m
- L
1
si L
2 :
precizia = 1% = 1%*0.2m = +/- 0.002m
In realitate, aceste precizii sunt simple supozitii teoretice, astfel nct trebuiesc analizate n
continuare diferitele surse de erori si contributul lor la stabilirea preciziei msurtorilor.
1.3.1.1 Erorile de multiparcurs
In cazul determinrilor de precizie este absolut necesar ca att n faza observatiilor de teren, ct
si n cadrul fazei de prelucrare, s se aib n vedere toate sursele de erori.
Eroarea de multiparcurs (multipath) apare atunci cnd o parte a semnalului de la satelit ajunge la
receptor ntr-o manier indirect, prin reflectare de diferite suprafete amplasate mai aproape sau mai
departe de receptor.
Msurtoarea ntre centrele de faz al antenei receptorului si ale antenei satelitului nu mai are
deci un parcurs rectiliniu, aprnd acelasi fenomen de ntrziere al semnalului si de crestere a distantei
msurate. Receptoarele din ultimele generatii au softul de prelucrare mai dotat si poate s elimine din
nregistrri semnalele parazitate de efectul de multiparcurs.
Fig. 1.7. Eroarea multipath
1.3.1.2 Erori datorate excentricittii centrului de faz al antenei
Aceast eroare este datorat variatiei pozitiei centrului de faz al antenei, care n fapt este o
problem teoretic de electronic si nu de mecanic, aceasta datorit variatiei n functionare a
frecventelor (centrul de faz pentru portanta L
1
nu coincide cu centrul de faz a portantei L
2)
si elevatiei
satelitului care emite semnalul. Din punct de vedere al utilizatorului, pentru ca aceast eroare, cnd
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 15
exist, s nu fie amplificat este necesar ca orizontalizarea antenei precumsi orientarea ei s se fac cu
maximum de atentie.
Aceste erori au o valoare mic, n jurul a 2-3cm, dar aceast valoare devine important pentru
determinrile de precizie n probleme de nivelment.
1.3.1.3 Erorile datorate electronicii receptorului
O serie de alte erori depind de starea tehnic a componentelor electronice ale receptorului. De
exemplu, msurarea diferentelor de faz reprezint o modalitate de corelare n timp real si n acest caz
este foarte important ca semnalul de la satelit s nu fie depreciat, pentru a permite o corelare optim.
Calitatea semnalului depinde oricum, n mare msur, de eventuale interferente electomagnetice
care pot cauza cresterea zgomotului semnalului si, n unele cazuri nefavorabile, s conduc chiar la
pierderea semnalului.
1.3.2 Erorile sistematice
1.3.2.1 Erorile de ceas
Erorile de ceas ale satelitilor si ale receptoarelor, pot fi s fie divizate n dou componente:
- asincronismul (offset) ceasurilor, fapt ce conduce la o deplasare a originii de msurare a
timpului;
- deriva, datorat teoriei relativittii, dependent de timp;
Pentru perioade de scurt durat, aceste erori pot fi modelate de polinoame de ordinul doi,
pentru ceasurile atomice de la bordul satelitilor si de polinoame de grad superior, pn la ordinul opt,
pentru ceasurile cu cuart ale receptorilor GPS.
1.3.2.2 Erorile de orbit
Este cunoscut faptul c pentru pozitionarea GPS este necesar s fie cunoscute orbitele satelitilor
observati (efemeridele), n sensul de a se cunoaste la fiecare epoc de nregistrare coordonatele ct mai
precise ale centrului antenei de emisie a satelitului.
Aceste date referitoare la orbite, reunite n notiunea de efemeride, au o precizie diferit, dup
cum urmeaz:
- broadcast, efemeride transmise n mesajul de navigatie care au precizie n jurul a 30-50 de
metri;
- precise, efemeride care sunt calculate si pot fi utlizate dup perioada de observatii, n
cadrul etapei de procesare a datelor si au precizii metrice si chiar subdecimetrice;
Dup cum s-a mai specificat, aceste erori au repercursiuni asupra pozitionrii absolute si
afecteaz n mod direct coordonatele spatiale ale receptorului.
In cazul n care observatiile se realizeaz prin metoda diferential sau relativ, influenta acestor
erori n pozitionare este minor.
In asemenea cazuri, care la utilizarea tehnologiei GPS n domeniul geodeziei sunt normale, se
poate observa c abaterile standard relative ale bazelor msurate sunt relativ de acelasi ordin de mrime
cu abaterile standard relative ale distantelor (range) satelit receptor, adic:
dr *
20000
b
db
b
s
r
s
b r
= = (1.27)
Intelegnd prin b, lungimea bazei determinate, r distanta satelit receptor si prin s
r
si s
b
abaterile
standard absolute ale acestora, conform relatiei (1.27), ele pot fi considerate proportionale.
Dac n relatia (1.27) se trece la diferente si se consider altitudinea medie a satelitilor, r
=20000km n tabelul 1.1 de mai jos se prezint, n functie de valorile dr, erori ale orbitelor satelitare,
valorile db, erori ale bazelor determinate n functie de lungimea acestora:
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 16
Tabel 1.1
Nr.
crt..
Eroare orbita
(m)
Lungime baza
(km)
Eroarea bazei
(ppm)
Eroarea bazei
(mm)
1 20.0 10 1.0 10.0
2 20.0 1000 1.0 1000.0
3 2.0 10 0.1 1.0
4 2.0 1000 0.1 100.0
5 0.2 10 0.01 0.1
6 0.2 1000 0.01 0.01
1.3.2.3 Erorile datorate refractiei troposferice
Troposfera reprezint, segmentul de baz al atmosferei, cuprins ntre suprafata Pmntului si o
nltime de cca.40 - 50 km.
Aceast zon este divizat n dou prti:
- partea umedcuprins ntre suprafata Pmntului si o altitudine de cca. 11km, zon n
care umiditatea atmosferic este prezent si are valori semnificative;
- partea uscat cuprins ntre altitudinea de cca.11km si 40km .
Refractia troposferic provoac o ntrziere a receptionrii semnalului de la satelit, ntrziere
care conduce la cresterea timpului de parcurgere a distantei de la satelit la receptor si n consecint o
crestere sistematic a distantelor.
Intrzierea datorat refractiei troposferice este independent de frecventa semnalului, aceasta
comportndu-se identic fat de cele dou unde purttoare L
1
si L
2
, dar este dependent de parametrii
atmosferici si de unghiul zenital sub care se gseste receptorul fat de satelit.
Valoarea refractiei troposferice creste exponential cu valoarea unghiului zenital si din aceste
motive nu este recomandabil a se efectua observatii la satelitii care apun sau rsar, dect dup ce au
intrat sau au iesit, sub unghiul zenital de 70
0
- 75
0
.
Pentru eliminarea acestei erori sistematice, s-au realizat mai multe modele matematice printre
care cele mai utilizate sunt cele realizate de Hopfield si Saastamoinen, fiind de amintit si realizrile lui
Good-Goodman, Black, Niell, Chao si altii.
Modelul Hopfield, are urmtoarea form:
] m [
T
e
) 96 . 817 T 028512 . 0 ( L
] m [ ) T 72 . 148 40136 (
T
P
10 * 28 . 155 K
] m [
) 25 . 2 z cos(
L
) 25 . 6 z cos(
K
R
2
K
P
K
K
K
7
2 2
trop
+ =
+ =
+
+
+
= o
(1.28)
unde:
oR
trop
= (R
0
- R) eroarea troposferic
R distanta rectilinie (geometric)
R
0
distanta msurat
P presiunea atmosferic [mbar]
T
K
temperatura [grade Kelvin]
e
P
presiunea umed [mbar]
z unghiul zenital [sexa]
Dup cum se poate observa din relatiile (1.28)[Cina,2000], corectia troposferic, oR
trop
, are doi
termeni: primul (K) care reprezint contributul componentei uscate, deci a zonei superioare a troposferei
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 17
si al doilea (L), care reprezint componenta umed aferent zonei de la suprafata Pmntului, ambele
calculate fat de zenitul locului.
Gradul de incertitudine al modelului, estimat la cca.5%, este datorat dificulttilor de modelare
ale componentei umede, datorit distributiei necontrolate a vaporilor de ap n lungul traseului
semnalului, de la satelit la receptor.
1.3.2.4 Refractia ionosferic
Ionosfera, reprezint o alt parte a atmosferei terestre, cuprins ntre altitudinea de 40 - 50 km,
pn la cca 1000 km.
Erorile datorate refractiei ionosferice depind de frecventa semnalului si deci ele au valori diferite
pentru cele dou unde purttoare L
1
si L
2
.
Aceast eroare care se manifest prin ntrzierea semnalului de la satelit la receptor si care de
fapt face s creasc timpul de parcurs al semnalului, are consecinte directe n mrirea distantelor
msurate la sateliti, aceast eroare eliminndu-se printr-o combinatie oportun a puttoarelor L
1
si L
2
.
Modelarea matematic a procesului de calcul al corectiei ionosferice se realizeaz cu ajutorul
unei dezvoltri n serie (Willman Tucker,1968):
....
f
B
f
B
R
4
2 1
iono
= o (1.29)
n care oR
iono
este eroarea datorat ionosferei, f este frecventa semnalului si B
i
depinde densitatea
electronilor liberi si are valoare estimat cu urmtoarea relatie:
ds ) h ( N A B
0
i
i i
}
= (1.30)
n care:
N
i
= densitatea electronilor n functie de altitudinea h (km);
A
i
= constant de estimare;
0
= parcursul semnalului ;
Pentru frecvente nalte, cum sunt semnalele GPS, termenul doi, din formula (1.29), poate fi
neglijat, valoarea erorii datorate refractiei ionosferice putnd fi dat de relatia:
2
1
iono
f
B
R ~ o (1.31)
Msurnd distanta R
j
i
, ntre satelitul j si receptorul i, cu ambele purttoare L
1
si L
2
, din
cauza efectului diversificat al refractiei ionosferice asupra frecventelor f
1
si f
2
, se obtin pentru
distant, valorile R
01
si R
02
, dup cum urmeaz:
) R R ( f B
f
B
R R
) R R ( f B
f
B
R R
02
j
i
2
2 1
2
2
1 j
i 02
01
j
i
2
1 1
2
1
1 j
i 01
= =
= =
(1.32)
Egaliznd cele dou relatii de la grupul de formule (1.32) se obtine:
) R R ( f ) R R ( f
02
j
i
2
2 01
j
i
2
1
= (1.33)
si n acest fel se obtine distanta (range), ca o combinatie a celor dou frecvente:
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 18
, )
2
2
1
2
1
2
02 01
2
2
2
1
2
2 02
2
1 01 j
i
2
2 02
2
1 01
2
2
2
1
j
i
f
f
1
f
f
R R
f f
f R f R
R
unde de
f R f R f f R
|
|
.
|
\
|
|
|
.
|
\
|
=
=
(1.34)
In acest fel, distanta R
i
j
se determin combinnd cele dou frecvente si se poate elimina efectul
refractiei ionosferice asupra distantei.
Utilizarea receptoarelor cu dubl frecvent este indispensabil cnd se intentioneaz msurarea
unor baze mai mari de 15km , sub aceast lungime, efectul refractiei ionosferice putnd fi eliminat prin
msurtori diferentiale sau relative.
Fig. 1.8.Refractia ionosferei
In sintez, valoarea erorilor sistematice care afecteaz distanta de la satelit la receptor au valorile
prezentate succint n Tabelul 1.2:
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 19
Tabelul 1.2
Tipul erorii sistematice Eroarea
ERORILE DE CEAS
- satelit (cu parametrii corectati)
- receptor
5 - 10 m
10 - 100 m
ERORILE DE ORBIT
- efemeride broadcast
- efemeride precise
20 - 40 m
3 - 5 m
ERORILE DE REFRACTIE
- ionosferic
- troposferic
20 - 50 m
2 - 10 m
1.3.3 Accesul la msurtori
Odat cu nceperea lansrii satelitilor din blockul II, sistemul GPS a devenit disponibil pentru
toti utilizatorii civili ns gestionarul sistemului, DoD(Department Of Defence- USA), a implementat o
serie de tehnici care s-i permit control, protectie si sigurant, asupra ntregului sistem, n special
asupra preciziilor pe care la poate asigura la un moment dat.
La origine, precizia de pozitionare absolut cu ajutorul msurrii codului C/A, a fost estimat la
cca 400m, ns practica a demonstrat c n realitate precizia obtinut este mult mai mare si anume cca
20-40m.
Din acest motiv DoD, a implementat tehnicile Selective Availlability SA care constituie asa
numitul Acces selectiv si Anti-Spoofing - AS, care reprezint tehnica Anti-furt.
1.3.3.1 Metoda selectiv
Prima metod, SA, permite DoD s realizeze o degradare controlat a preciziilor de pozitionare
si de navigatie n timp real, prin dou modalitti:
- degradarea controlat a preciziilor ceasurilor (procesul o) ;
- manipularea controlat a efemeridelor satelitilor GPS (procesul c) .
Prin aceste dou modalitti, degradrile preciziilor de pozitionare au urmtoarele valori
declarate de DoD:
- probabilitate 95.0%: 100m. n planimetrie si 156m. n altimetrie;
- probabilitate 99.9%: 300m. n planimetrie si 500m. n altimetrie;
Procesul o , reprezint o modificare a frecventei fundamentale a ceasurilor de pe sateliti, cu
impact de eroare direct asupra msurtorilor de pseudo-distante. Acestea pot avea variatii de pn la
cteva zeci de metri n cteva minute.
Procesul c, const n trunchierea unor informatii transmise prin semnalul de navigatie, n
maniera de a nu permite un calcul precis al pozitiilor orbitale ale satelitilor, cu valori ntre 50 150m,
cu consecinte care cauzeaz erori semnificative pentru pseudo-distante.
Efectul procesului o, poate fi eliminat prin procedeul de lucru relativ sau diferential, iar
efectul procesului c, se elimin n postprocesare, prin utilizarea efemeridelor precise si nu a celor
transmise de MCS (broadcast).
Metoda SA a fost activat pentru prima oar n anul 1990 si n anul 2000 a fost dezactivat.
1.3.3.2 Metoda anti-furt
Metoda AS (Anti-Spoofing) produce o recodificare a codului P n codul Y care poate fi accesat
de utilizatorii militari si un numr restrs de utilizatori civili..
Aceast metod afecteaz n general navigatia n timp real cu codul P, care este de cca zece ori
mai precis dect navigatia n timp real cu codul C/A.
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 20
Tehnicile GPS de pozitionare absolut, dup cum s-a putut vedea, sunt afectate de erori de
complexitti diferite, care ne conduc la precizii insuficiente n aplicatiile geodezice.
Pentru a ajunge la precizii ridicate, se poate concluziona c trebuie abandonat pozitionarea
absolut, single point are o semnificatie pur principial n msurtorile geodezice si potrivit
tehnicilor cunoscute de la geodezie si topografie, unde erorile sistematice se caut s fie elimine prin
metode de msurare (ex. la nivelmentul geometric stationarea la mijloc, cu portei egale, conduce la
eliminarea erorilor de refractie, sfericitate, focusare, etc.) cum ar fi, efectuarea de diferente de pozitie,
care ar duce la eliminarea sau diminuarea unei serii de erori sistematice, comune celor dou statii.
Posibilittile de a putea realiza diferente de pozitie sunt oferite de tehnicile GPS, diferentiale si
relative, tehnici la care se pleac de la conceptul c bazele care se msoar sunt diferite, dar au un
continut geometric asemntor.
1.4 Pozitionarea GPS, relativ
Fig.1.9. Vector GPS
Pozitionarea GPS, relativ, are ca scop determinarea unui vector, baseline, sau a
componentelelor vectorului care uneste dou puncte geodezice n care se stationeaz si se receptioneaz
simultan cu dou receptoare GPS diferite.
Fie Aun punct geodezic cu coordonate geodezice spatiale (ITRFxx, EUREF, etc.) cunoscute si
un punct geodezic B, Fig.1.6,considerat punct nou. Coordonatele punctului B, se vor putea determina cu
relatiile:
AB A B
X X . + = (1.35)
AB
AB
AB
A B
A B
A B
Z
Y
X
Z Z
Y Y
X X
A
A
A
=
= A
AB
(1.36)
Pozitionarea relativ se va putea face fie cu msurarea codurilor, fie cu msurarea diferentelor de
faz, care de fapt se aplic curent n practic.
Este necesar s se fac msurtori simultane cu cel putin dou receptoare, n cazul nostru,
amplasate n punctele A si B, care presupunem c vd n acelasi timp satelitii i,j.
In aceste conditii se pot realiza combinatii liniare, numite diferente simple, duble sau triple.
Marea majoritate a softurilor, care prelucreaz msurtori GPS, utilizeaz aceste diferente care folosesc
urmtoarele modele matematice.
1.4.1 Diferenta simpl
A
B
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 21
Se cosider dou receptoare amplasate n punctele de statie Asi B, din care se observ simultan,
satelitul j, Fig.1.7, care emite continuu semnale GPS, fr a avea ntreruperi, ntrerupetri care ar
cauza asa numitele cycle slip.
Fig.1.10. Diferenta simpl
Se pot scrie, pentru fiecare punct, ecuatiile prezentate n grupul de formule (1.20), respectiv
ecuatia pentru msurtorile de faz, att pentru punctul A ct si pentru punctul B:
) ( ) (
1
) ( ) (
) ( ) (
1
) ( ) (
t B f N t t f t
t f N t t f t
j j
B
j
B
j j j
B
A
j j
A
j
A
j j j
A
o
i
o
o
i
o
+ = u
+ = u
(1.37)
Fcnd diferenta ntre cele dou ecuatii, se obtine:
)] ( ) ( [ )] ( ) ( [
1
) ( ) ( t t f N N t t t t
A B
j j
A
j
B
j
A
j
B
j
A
j
B
o o
i
+ = u u (1.38)
Se poate constata, c diferenta simpl elimin partea de eroare generat de produsul f*o(t),
generat de asincronismul ceasului de pe satelit, att ct este comun la cele dou ecuatii.
Actioneaz, n orice caz, n continuare cotele de eroare datorate ceasurilor celor dou
receptoare si cotele de eroare datorate termenilor ambiguittilor de faz.
Ecuatia (1.38) reprezint ecuatia pentru diferenta simpl n care putem introduce urmtoarele
notatii:
) ( ) ( ) ( t t t
N N N
j
A
j
B
j
AB
j
A
j
B
j
AB
o o o =
=
(1.39)
) ( ) ( ) (
) ( ) ( ) (
t t t
t t t
j
A
j
B
j
AB
j
A
j
B
j
AB
=
u u = u
(1.40)
si dac se substituie relatiile (1.39) si (1.40), n relatia (1.38), rezult:
AB
j j
AB
j
AB
j
AB
f N t t o
i
+ = u ) (
1
) ( (1.41)
S
j
A
B
X
Y
Z
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 22
1.4.2 Diferenta dubl
Se cosider dou receptoare amplasate n punctele de statie Asi B, Fig.1.10, din care se observ
simultan satelitii j si k care emit continuu semnale GPS cu frecvente identice, adic f
i
= f
k
, fr
ntreruperi generatoare de cycle slip, sateliti pentru care se pot scrie dou ecuatii de diferent simpl
conform relatiei (1.41):
AB
k k
Ab
k
AB
k
AB
AB
j j
AB
j
AB
j
AB
f N t t
f N t t
o
i
o
i
+ = u
+ = u
) (
1
) (
) (
1
) (
(1.42)
S
A
B
S
k
Z
Y
X
Fig.1.11 Diferenta dubl
Admitnnd ipoteza egalittii frecventei semnalelor emise de la cei doi sateliti, scznd cele dou
ecuatii (1.42) de diferent simpl, obtinem:
j
AB
k
AB
j
AB
k
AB
j
AB
k
AB
N N t t t t + = u u )] ( ) ( [
1
) ( ) (
i
(1.43)
Utiliznd notatiile de la grupul de formule (1.38) si (1.39), introduse pentru diferenta simpl,
rezult n continuare:
jk
AB
jk
AB
jk
AB
N t t + = u ) (
1
) (
i
(1.44)
Formula (1.44), reprezint ecuatia pentru diferenta dubl si este de notat c ea elimin erorile
generate de ceasurile receptoarelor cu ajutorul celor dou ecuatii ale diferentelor simple si permite
determinare necunoscutelor ambiguittilor de faz.
Eliminarea erorilor datorate ceasurilor receptoarelor este ratiunea si caracteristica de baz a
tuturor programelor de prelucrare a msurtorilor GPS.
Aceast concluzie este asigurat de obligativitatea ca toti satelitii s emit n aceeasi frecvent,
iar observatiile s fie executate simultan.
Termenii relatiei (1.44) se pot scrie n mod explicit, dup cum urmeaz:
j
A
k
A
j
B
k
B
jk
AB
j
A
k
A
j
B
k
B
jk
AB
j
A
k
A
j
B
k
B
jk
AB
N N N N N
t t t t t
t t t t
+ =
+ =
u + u u u = u
) ( ) ( ) ( ) ( ) (
) ( ) ( ) ( ) (
(1.45)
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 23
1.4.3 Diferenta tripl
Pentru a elimina ambiguittile de faz, necunoscute, Fig.1.11, deoarece acestea sunt
independente de timp, Remondi (1984) sugereaz utilizarea diferentei celor dou duble diferente la
epocile t
1
si t
2
.
S
A
B
k
S
k
1 t
2 t
t1
S
S
2
t
j
j
X
Z
Y
Fig.1.12 Diferenta tripl
Ecuatia de la (1.44), se particularizeaz pentru epocile t
1
si t
2
:
jk
AB
jk
AB
jk
AB
jk
AB
jk
AB
jk
AB
N t t
N t t
+ = u
+ = u
) (
1
) (
) (
1
) (
2 2
1 1
i
(1.46)
Se presupune deasemeni ca observatiile sunt fr ntreruperi (cycle slip), conditie n care
termenii ambiguittilor continu s fie constanti. Fcnd diferentele celor dou relatii din grupul de
formule (1.46), se obtine ecuatia diferentei triple:
)] ( ) ( [
1
) ( ) (
1 2 1 2
t t t t
jk
Ab
jk
AB
jk
AB
jk
AB
i
= u u (1.47)
care poate fi scris n form simplificat:
) (
1
) (
12 12
t t
jk
AB
jk
AB
i
= u (1.48)
Forma desfsurat a triplei diferente, care contine termenii u si , la momentele t
1
si t
2
, contine
la rndul ei, 8 termeni fiecare:
) ( ) ( ) ( ) ( ) 2 ( ) ( ) ( ) ( ) (
1 1 1 1 2 2 2 12
t t t t t t t t t
j
A
k
A
j
B
k
B
j
A
k
A
j
B
k
B
jk
AB
u u + u + u u + u u u = u
) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) (
1 1 1 1 2 2 2 2 12
t t t t t t t t t
j
A
k
A
j
B
k
B
j
A
k
A
j
B
k
B
jk
AB
+ + + =
Avantajul principal al triplei diferente, este c elimin necunoscutele, ambiguitti de faz si din
acest motiv tripla diferent este imun la schimbrile ambiguittii de faz (cycle slip).
1.5 Orbitele satelitilor GPS
De acuratetea cu care sunt determinate si cunoscute efemeridele orbitelor satelitilor GPS
depinde precizia cu care, prin metodele prezentate, se determin coordonatele spatiale ale punctelor
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 24
geodezie care se determin cu ajutorul acestei tehnologii. Erorile acestora influenteaz n mod deosebit
determinrile single point, precumsi cele determinate prin msurtori cu dou receptoare asa cum se
poate vedea in tabelul 1.1.
In acest sens, statia master de la Colorado Spring transmite zilnic si chiar de cteva ori pe zi,
orbitele broadcast care, fara SA activat, pot ajunge la precizii de cca.5m, pentru orbite.
1.5.1 Parametrii si particularittile orbitelor satelitare
Dup cum este cunoscut, pentru analiza miscrii pe orbit a unui satelit artificial, de regul, se
neglijeaz dimensiunile acestuia, considerndu-se c ntreaga sa mas este concentrat n centrul de
mas. Miscarea satelitului este astfel comparat cu cea a unui punct material de mas mcare evolueaz
n jurul Pmntului, pe care l considerm de mas Msi suport efectul atractiei sale gravitationale.
Pentru studiul miscrii pe orbit, a unui satelit artificial, se admit urmtoarele ipoteze
simplificatoare:
- ntreaga mas a satelitului este concentrat n centrul de mas al acestuia;
- miscarea satelitului se consider neperturbat, keplerian, adic se produce numai sub
influenta atractiei Pmntului;
- Pmntul este considerat un corp sferic, omogen, cu densitate uniform distribuit, astfel nct
forta sa de atractie deriv dintr-un cmp gravitational avnd potentialul de forma:
2 3 8
10 * 3986005
= = = s m GM K unde
r
K
U
p
p
(1.50)
In aceste conditii, ecuatia de miscare a unui satelit n cmpul gravific terestru este exprimat
printr-o ecuatie diferential de ordin doi, functie de timp:
3
r
r
GM r
= (1.51)
unde:
GM- constanta gravitational geocentric [Ghitu, 1983]
M- masa Pmntului
r - modulul vectorului de pozitie geocentric al satelitului
r
- vectorul de pozitie geocentric al satelitului
Se cunoaste c solutiile ecuatiilor, de tipul celei din relatia (1.51), reprezint o elips a crei
ecuatie parametric are forma:
cos 1
)
2
1 (
e
e a
r
+
= (1.52)
n care:
r vectorul de pozitie geocentric al satelitului (Fig.1.10)
a,b semiaxele elipsei (orbitei) pe care se misc satelitul
e excentricitatea elipsei (orbitei) pe care se misc satelitul
anomalia adevrat,unghiul ntre semiaxa mare si vectorul de pozite (Fig.1.11)
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 25
p e r i ge u
b
a
Pa mi nt ul
A P
E
r
a e
Sa t e l i t ul
Fig.1.13 Orbita Keplerian
Din Fig.1.10 anomalia adevrat poate fi exprimat n functie de anomalia excentric E:
|
.
|
\
|
+
=
|
.
|
\
|
2 1
1
2
E
tg
e
e
tg
(1.53)
O
Y
X
S
i
0
p e r i ge u
p o l
e c ua t o r
no d
o
r
b
i
t
a
X
1
p unc t ul ve r na l
Fig.1.14 Orbita Keplerian
Anomalia adevrat defineste pozitia satelitului artificial pe orbit (Fig.1.11), pozitia n timp
fiind dat de momentul trecerii la perigeu. In cele dou figuri, notatiile care definesc e lipsa keplerian
au urmtoarele semnificatii:
O ascensia dreapt a nodului ascendent (unghiul dintre axa X care trece prin punctul vernal si
intersectia planului orbitei cu planul ecuatorial);
i - unghiul de nclinare al orbitei satelitului;
:argumentul perigeului;
t
0
momentul trecerii la perigeu;
a - semiaxa mare a elipsei (orbitei);
e - excentricitatea elipsei (orbitei);
Totusi, pentru calculul valorilor reale ale parametrilor orbitali, trebuesc cunoscute mrimile si
directiile influentelor factorilor perturbatori care ndeprteaz miscarea real a satelitului de o miscare
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 26
keplerian teoretic.
1.5.2 Elemente perturbatoare ale orbitei satelitilor
Datorit factorilor perturbatori care actioneaz asupra satelitului, orbita sa are variatii
permanente, rezultnd o orbit perturbat care poate fi estimat ca o nfsurtoare a orbitei kepleriene,
definit anterior.
Dac n ecuatia de miscare neperturbat, keplerian (1.51), se introduce suma factorilor care
produc perturbatii ale orbitei satelitului cu actiune fie n timp real (asa numitele perturbatii seculare, fie
periodic, la intervale de timp bine stabilite), se obtine relatia de miscare adevrat a satelitului:
t
r
r
r
GM r
+ =
3
(1.54)
t
, acceleratia perturbatoare, este compus din urmtoarii factori perturbatori:
a sp d ls e g t
r r r r r r r r + + + + + + =
0
(1.55)
unde:
g
r = perturbatiile datorate necentricittii cmpului de forte ale Pmntului, ca urmare a
nesfericittii acestuia si a neuniformittii distributiei maselor sale;
0
, r r
e
= perturbatiile datorate mareelor terestre si ale oceanului planetar;
ls
r = perturbatiile datorate atractiei lunii-solare si a altor planete;
d
r = perturbatiile datorate rezistentei atmosferei nalte;
a sp
r r = perturbatiile datorate presiunii radiatiei solare si a radiatiei reflectate;
Desi cu valori mici, n raport cu primul termen al relatiei (1.54), aceste perturbatii exist si ele
pot modifica orbita initial n mod apreciabil, ceeace mai ales pentu satelitii GPS constituie un
impediment major, care impune controlarea riguroas a acestora si aplicarea unor corectii pentru
mentinerea parametrilor orbitei ntre anumite limite, n cazul nostru deosebit de riguroase care s
asigure o pozitionare ct mai precis.
1.5.3 Determinarea orbitelor
Determinarea oficial a orbitelor satelitilor GPS revine segmentului de control al sistemului
care, prin cele 5 statii monitoare, pune la dispozitia utilizatorilor sistemului orbitele n timp real, numite
orbite Broadcast.
Inainte de anul 2000, fr SAactivat si dup anul 2000 cnd sistemul SA a fost dezactivat, ofer
pentru aceste orbite o precizie de +/- 5m. care conform relatiei (1.27) asigur o precizie n determinarea
vectorilor cu lungime de 100 km, de pn la +/-25mm.
Separat de aceste orbite, la anumite intervale de timp n functie de nivelul de precizie al
acestora, agentii internationale specializate, pun la dispozitia utilizatorilor asa numitele orbite precise
care se pot determina cu o acuratete de pn la +/-0.05m, care asigur valori deosebit de precise pentru
vectorii determinati, de sub 1mm, pentru baze de cca.1000 km.
Utilizarea acestei tehnologii n diverse domenii de activitate tehnologic si de cercetare, a fcut
ca numrul de statii terestre, de urmrire a satelitilor GPS, s creasc ajungndu-se ca n 1988 s fie
realizat prima retea global de statii la sol, care independent de segmentul de control al sistemului, prin
monitorizarea segmentului spatial a ajuns s determine orbite precise de un deosebit nivel calitativ, puse
la dispozitie n timp util, cca. dou sptmni, utilizatorilor civili.
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 27
Reteaua cunoscut sub denumirea Global Orbit Tracking Experiment (GOTEX) cuprinde statii
la sol VLBI si SLR n care au fost amplasati si receptori GPS, ca statii permanente.
Dup 1990 International Association of Geodesy (IAG) a nfiintat Serviciul GPS Interna tional
pentru Geodinamic (IGS) care printre altele, are ca scop determinarea orbitelor precise pentru aplicatii
n geodinamic. Reteaua de urmrire a segmentului spatial este compus din peste 100 de statii
distribuite pe tot globul a cror pozitionare este definit prin coordonate spatiale n sistemul
International Terrestrial Referance Frame (ITRF), sistem de referint realizat si ntretinut de
International Earth Rotation Service (IERS).
Datele GPS, preluate de aceste statii ale IGS, sunt prelucrate de 7 agentii printre care este de
amintit National Geodetic Survey (NGS) din USA, Canadian Space Geodesy Forum (CANSPACE)
din Canada, Australian Surveyng and Land Information Group (AUSLIG) din Australia , Centre for
Orbit Determination in Europe (CODE) din Elvetia si altele.
Pentru exemplificare, este de remarcat faptul c pe baza observatiilor preluate de IGS, CODE
furnizeaz diversilor utilizatori tipurile de orbite prezentate n tabelul 1.3 de mai jos:
Tabel nr. 1.3
Nr.
crt.
Tipul orbitei
Precizia
[m.]
Intervalul de timp
dupa care
sunt disponibile
Sursa
1. Orbite difuzate +/-3.00 in timp real mesajul de navigatie
2. Orbite prognozate de CODE +/-0.20 in timp real CODE
3. Orbite rapide ale CODE +/-0.10 dupa 16 ore CODE
4. Orbite rapide ale IGS +/-0.10 dupa 24 ore centrele IGS
5. Orbite finale ale IGS +/-0.05 dupa 11 zile centrele IGS
1.6 Corelri ale diferentelor de faz
In general, exist dou grupe de corelri: corelri fizice si corelri matematice.
Msurtorile de faz ntre un satelit GPS j si dou receptoare GPS, amplasate n dou puncte
Asi B, n care se fac msurtori, (
j
A
(t) ,
j
B
(t)) se pot corela fizic foarte usor, atunci cnd observatiile
nregistrate se refer la acelasi satelit GPS.
Cum este si normal, considerm corelrile matematice, operatiile matematice care se fac cu
grupul de msurtori si anume, cele induse de diferentele ntre observatii.
Se accept c erorile msurtorilor de faz, urmeaz o distributie normal a mediei si a
variantei
2
. Msurtorile brute, de faze, sunt linear independente sau necorelate.
Dac definim un vector care s contin msurtorile de faze, putem scrie:
Xo= , u) = o
2
I (1.56)
relatie care reprezint matricea de variant-covariant pentru faze si I ,reprezint,matricea unitate.
1.6.1 Diferente simple
Pornind de la ipoteza anterioar, pentru cele dou receptoare amplasate n punctele A si B,
privitor la satelitii j si k, se pot scrie pentru epoca t cte o ecuatie de diferent simpl pentru fiecare
satelit, conform relatiei (1.40).
Dac aceste relatii sunt scrise sub form matricial, se obtine:
XA = X u (1.57)
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 28
unde termenii formulei reprezint:
(
]
1
u
u
=
) (
) (
t
t
k
AB
AB
SD (1.58)
k
B
k
A
j
B
J
A
u
u
u
u
=
=
1 1 0 0
0 0 1 1
C (1.59)
Aplicnd legile de propagare a covariantei n relatia (1.57), se obtine:
cov (SD) = C cov () C
T
(1.60)
si prin nlocuire n (1.56), rezult:
cov (SD) = C
2
I C
T
=
2
C C
T
(1.61)
I CC
T
2
1 0
0 1
2 = = (1.62)
Inlocuind relatia (1.61) se obtine matricea de variant-covariant pentru diferenta simpl:
cov (SD) = 2
2
I (1.63)
Rezult c, diferentele simple, sunt necorelate. Dimensiunea matricei unitare corespunde
numrului de simple diferente la epoca t , factorul 2 din relatie neavnd legtur cu numrul de diferente
simple. Considernd nc o epoc de msurtori, matricea de variant-covariant este tot o matrice
unitar ale crei dimensiuni sunt date de numrul ntreg de diferente simple.
1.6.2 Diferente duble
Considernd aceleasi puncte Asi B, n care se fac nregistrri de ctre dou receptoare, asupra a
trei sateliti j, k si l dintre care, satelitul j va fi considerat satelit de referit.
Dac se are n vedere doar epoca t rezult urmtoarele ecuatii specifice diferentelor duble:
) ( ) ( ) (
) ( ) ( ) (
t t t
t t t
j
AB
l
AB
jl
AB
j
AB
k
AB
jk
AB
u u = u
u u = u
(1.64)
Aceste ecuatii se pot scrie sub form matricial:
DD =C SD (1.65)
n care termenii, au urmtoarele expresii:
) (
) (
t
t
jl
AB
JK
AB
u
u
= DD (1.66)
l
AB
k
AB
j
AB
u
u
u
=
= SD C
1 0 1
0 1 1
(1.67)
Matricea de variant-covariant pentru dubla diferent de faze, este dat de relatia:
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 29
cov (DD) = C cov (SD) C
T
(1.68)
si dac se nlocuieste cu expresia din relatia (1.63), obtinem:
cov (DD) = 2
2
C C
T
(1.69)
Inlocuindu-se valoarea lui C din relatia (1.67) se obtine:
2 1
1 2
2 ) cov(
2
= o DD (1.70)
Dup cum se poate observa, n cazul dublei diferente rezultatele sunt corelate.
Matricea ponderilor P (t), se obtine din inversa matricei de variant-covariant:
P (t)=[cov (DD)]
-1
(1.71)
2 1
1 2
3
1
*
2
1
) (
2
=
o
t P (1.72)
unde dou duble diferente sunt utilizate la aceeasi epoca t.
Dac, cu n
DD
, se noteaz numrul de diferente duble la epoca t, matricea de corelatie este dat
de relatia:
DD
DD
DD
DD
n
n
n
n
t
.... .... ....
.... .... .... 1
.... 1 1
.... 1 1
1
1
2
1
2
) (
+
=
o
P (1.73)
Pn la acest moment demonstratia s-a axat pe msurtorile efectuate ntr-o singur epoc, t. In
conditii normale numrul de epoci este foarte mare si n acest caz, matricea de corelare este o matrice
bloc-diagonal cu dimensiunea n
i
, unde i =1,2,..n:
) (
....
) (
) (
) (
3
2
1
) (
n
t P
t P
t P
t P
t = P (1.74)
unde fiecare element al acestei matrici, este o matrice asemntoare, pentru fiecare epoc de msurare.
1.6.3 Diferente triple
Ecuatiile pentru diferentele triple sunt ceva mai complicate, deorece trebuie considerat fiecare
situatie. Covarianta unei singure triple diferente este dedus prin aplicarea regulii de propagare a
covariantei, prezentat n relatiile (1.49).
Considernd ipoteza de la diferenta dubl,cu satelitul j considerat satelit de referint, dar la dou
epoci de msurare, t
1
si t
2
, rezult:
) ( ) ( ) ( ) ( ) (
) ( ) ( ) ( ) ( ) (
1 1 2 2 12
1 1 2 2 12
t t t t t
t t t t t
j
AB
l
AB
j
AB
l
AB
jl
AB
j
AB
k
AB
j
AB
k
AB
jk
AB
u + u u u = u
u + u u u = u
(1.75)
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 30
Aceste dou ecuatii pot fi scrise sub form matricial, dup cum urmeaz:
TD = C SD (1.76)
relatie n care termenii au urmtoarea semnificatie:
) (
) (
) (
) (
) (
) (
1 0 1 1 0 1
0 1 1 0 1 1
) (
) (
2
2
2
1
1
1
12
12
t
t
t
t
t
t
t
t
l
AB
k
AB
j
AB
l
AB
k
AB
j
AB
jl
AB
jk
AB
u
u
u
u
u
u
=
=
u
u
=
SD C
TD
(1.77)
Matricea de covariant pentru diferenta tripl, are urmtoarea form:
cov (TD) = C cov (SD) C
T
(1.78)
n care dac se substituie relatia (1.63), se obtine:
cov (TD) = 2
2
C C
T
(1.79)
Inlocuind si relatiile din (1.77) se obtine[Hofmann Wellenhof, s.a.,1992]:
4 2
2 4
2
2
) cov( o = TD (1.80)
Dup cum se poate observa, n cazul diferentei triple rezultatele sunt corelate.
Matricea ponderilor P (t), se obtine din inversa matricei de variant-covariant prezentat n
relatia (1.80).
1.7 Pozitionarea static-relativ
Pentru realizarea lucrrilor de geodezie, de orice ordin cu tehnologia GPS, metoda static
relativ, este metoda care asigur cele mai bune precizii.
Precizia obtinut, este n corelare direct cu timpul de stationare si nregistrare a semnalelor de
la satelitii GPS (sesiuni), tipul de receptoare folosit, utilizarea n prelucrare a orbitelor precise si o serie
de alte msuri de precautie n observatii si prelucare, dar care vin cu efecte mai mici n alterarea
preciziilor asteptate.
S considerm c dorim s determinm o latur A B si n acest sens, cu dou receptoare se
execut msurtori n cele dou puncte, pe durata unei sesiuni de observatii.
Ne propunem n continuare s stabilim numrul de ecuatii si de necunoscute n cazul
diferentelor simple, duble si triple.
Se accept c din punctele Asi B, receptoarele GPS nregistreaz date de la aceeasi sateliti si la
aceeasi epoc. La fel cum s-a procedat la pozitionarea absolut, cu n
j
vom nota numrul de sateliti
observati si cu n
t
, numrul de epoci observate.
Ecuatia msurtorilor de faze, prezentate n relatia (1.20), nu are nicio legtur cu vectorul AB,
dar este util n solutionarea pozitionrii absolute.
In cazul de fat vom putea scrie o ecuatie de diferent simpl ntre cele dou receptoare,
amplasate n punctele A si B, pentru fiecare epoc si pentru fiecare satelit, numrul ecuatiilor de erori
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 31
fiind dat de produsul n
j
n
t
. Numrul de necunoscute este dat de termenii ecuatiei de diferent simpl,
din relatia (1.41), adic:
1 n
n 3
n n n 3 n n
j
j
t t j t j
+
> + + > (1.81)
Aceast relatie este echivalent cu relatia (1.22) si ajut la evaluarea teoretic a numrului de
msurtori necesare care s conduc la admiterea unei solutii.
Dup cum se poate vedea din relatia (1.81), observatiile asupra unui satelit nu pot admite o
solutie, deoarece se anuleaz numitorul. Solutia cu n
j
= 2 sateliti conduce la 5 >
t
n epoci de msurare,
iar n cazul normal n care n
j
= 4 sateliti sau n
j
> 4 sateliti , pentru a avea solutie, avem nevoie de cel
putin 3 epoci de msurare.
Pentru diferenta dubl, relatia ntre numrul de msurtori si de necunoscute se poate stabili
urmnd aceeasi logic. Pentru a scrie o diferent dubl, sunt necesari pentru fiecare pereche de
receptoare, minimum doi sateliti., de unde se poate cocluziona c dispunnd de n
j
sateliti vizibili, se pot
forma (n
j
1) duble diferente la fiecare epoc de msurare, n total, numrul de duble diferente va fi
deci (n
j
- 1) n
t .
Numrul de necunoscute va fi dat de relatia (1.44), adic:
jk
AB
jk
AB
jk
AB
N ) t (
1
) t ( +
= u (1.82)
|
.
|
\
|
+ >
|
.
|
\
|
1
j
n 3
t
n 1
j
n (1.83)
relatie care devine:
1
j
n
2
j
n
t
n
+
> (1.84)
Din relatia (1.84), se poate concluziona c numrul minim de sateliti n
j
= 2, necesit un numr
egal sau mai mare de 4 epoci de msurtori.
Pentru a avea ecuatii liniar independente cnd se formeaz duble diferente, se stabileste un
satelit de referint, fat de care se fac diferentele msurtorilor celorlalti sateliti observati.
Astfel, de exemplu, dac se consider observatiile executate fat de satelitii 6, 9, 11, 12 si se
stabileste satelitul 6, ca satelit de referint, la fiecare epoca de msurtori se pot forma dublele diferente
(9-6), (11-6) si (12 6). Alte duble diferente, combinatii lineare ale acestora si sunt linear dependente,
cum ar fi dubla diferent (11 9), care poate fi obtinut din substituirea diferentei (11 6) , n (9 6).
Modelul matematic al diferentei triple, include ca necunoscute unice cele trei coordonate
necunoscute, ale punctului care se determin (ambiguittile de faz nu mai apar n aceste diferente).
Pentru a scrie o diferent tripl, sunt necesare dou epoci de msurtori pentru fiecare pereche de sateliti
observati de dou receptoare.
Ca si mai nainte, n cazul unui numr de n
t
, oarecare de epoci de msurare, se pot considera (n
t
- 1) epoci, deci diferente triple, linear independente.
Ecuatiile triplei diferente se pot scrie ca n (1.48):
) t (
1
) t (
12
jk
AB 12
jk
AB
= u (1.85)
3 ) 1 n )( 1 n (
t j
> (1.86)
relatie care prezint raportul ntre ecuatii si necunoscute:
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 32
1 n
2 n
n
j
j
t
+
= (1.87)
relatie ce ne conduce la concluzia c la un numr minim de sateliti, n
j
=2 , este necesar s avem un
numr de epoci de msurare egal sau mai mare dect 4, iar dac avem observatii de la 4 sateliti, numrul
de epoci de msurare este egal sau mai mare dect 2.
Din prezentarea modelelor matematice pentru diferentele simple, duble si triple, se poate
concluziona, c practic, n cayul efecturii de observatii la 4 sateliti , 2 epoci de msurtori si pentru a
asigur suficient redundant si fixarea ambiguittii de fay de o manier credibil, este nescesar
achizitionarea de date, pentru o perioad de timp mult mai mare adfic mai multe epoci.
1.7.1 Pozitionarea cinematic-relativ
Metoda cinematic-relativ presupune existenta a dou sau mai multe receptoare, de preferat din
clasa geodezic, de un punct cu coordonate cunoscute, de echiparea receptoarelor GPS cu modemuri de
legtur radio att pentru receptorul fix, ct si pentru receptorul sau receptoarele mobile (rovere).
Metoda presupune un receptor care ocup un punct A de coordonate cunoscute si care rmne
fix pe toat durata msurtorilor, perioad n care un al doilea receptor, care se deplaseaz, caut s-si
determine pozitia la fiecare epoc de msurare. Epoca de msurtoare, reprezint un interval de timp
prestabilit, setat pe toate receptoarele GPS care particip la sesiunea de msurtori, statice, sau
cinematice.
Ca si n cazul msurtorilor statice, n cazul msurtorilor cinematice, modelul generat de
diferentele simple, duble si triple contin distanta geometric (range), care n cazul msurtorilor
cinematice, la receptoarele mobile, este variabil n timp.
Dac se consider, punctul B ca punct nou, determinat de receptorul mobil prin metoda
cinematic, distanta de la el , la un satelit j, este dat de relatia:
2
B
j 2
B
j 2
B
J j
B
)) t ( Z ) t ( Z ( )) t ( Y ) t ( Y ( )) t ( X ) t ( X ( ) t ( + + = (1.88)
de unde se poate observa dependenta, coordonatelor punctului B, de timp. Modelul matematic, contine
ca necunoscute cele trei coordonate spatiale ale receptorului mobil, pentru fiecare epoc de msurare.
Presupunnd, ca si pn acum, c n
t
este numrul de epoci de msurare, numrul total de necunoscute
este 3 n
t
. Relatia dintre numrul de ecuatii si numrul de necunoscute n cazul diferentelor simple,
duble si triple este:
- diferent simpl: n
j
n
t
> 3 n
t
+n
j
+ n
t
- diferenta dubl: (n
j
-1) n
t
> 3 n
t
+ (n
j
1) (1.89)
- diferenta tripl: (n
j
-1) (n
t
1) > 3n
t
1
Relatia:
4 n
n
n
j
j
t
> (1.90)
echivaleaz cu modelul diferentei simple prezentat n relatia (1.25).
Miscarea continu a receptorului B, restrnge numrul de date disponibile pentru determinarea
pozitiei epoc de epoc. Niciuna din situatiile prezentate n grupul de reltii (1.89) nu admite o solutie
pentru pozitionarea cinematic pentru msuarea unei singure epoci (n
t
= 1).
Pentru a se realiza aceast determinare, este necesar eliminarea necunoscutei ambiguittii de faze, cu o
procedur de initializare a msurtorilor cinematice. Dup eliminarea acestei necunoscute, diferenta
simpl si dubl (termenul din dreapta inegalittii) necesit pentru a admite solutii pentru o epoc de
msurtori , ca numrul de sateliti de la care se fac nregistrri s fie n
j
> 4, pentru orice valoare a lui n
t
.
Tripla diferent poate fi utilizat dac se cunosc coordonatele receptorului B care se misc
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 33
(rover), la o epoc de referint. Relatia triplei diferente din grupul de formule (1.89), ne conduce la
aceeasi conditie ca numrul de sateliti receptionati simultan s fie n
j
> 4, pentru a admite solutii pentru
orice valoare a lui n
t
, egal sau mai mare ca o epoc.
Toate modelele de pozitionare solicit, n practic, un numr de minimum patru sateliti
observabili simultan. Este de amintit c n general diferenta tripl nu este utiliza n poztionarea
cinematic n conditiile n care poztia de referint se modific de la epoc la epoc de msurare.
Omiterea ambiguittii de faze, pentru simpla si dubla diferent, implic faptul c acestea devin
cunoscute. Ecuatiile corespondente, pentru determinarea pozitiilor, devin simplu de scris pentru simpla
si dubla diferent, prin modificarea convenabil a relatiilor (1.41) si (1.44), trecnd ambiguitatea la
stnga egalittii ca n relatiile urmtoare:
AB
j j
AB
j
AB
j
AB
f ) t (
1
N ) t ( o
= u (1.91)
) t (
1
N ) t (
jk
AB
jk
AB
jk
AB
= u (1.92)
si acum necunoscutele, apar numai n dreapta egalittii.
Aceste ecuatii pot fi rezolvate n situatia n care se cunoaste pozitia initial a receptorului mobil
si n aceste conditii, vectorul care se determin din punctul de pornire A(starting point) se mai numste
vector de pornire (starting vector). Cunoscnd vectorul de pornire se poate determina ambiguitatea de
faz initial, precumsi toate pozitiile succesive ale receptorului mobil B, pn cnd din diverse motive,
se pierde semnalul de la sateliti sau dac datorit unor obstructii se receptioneaz mai putin de 4 sateliti,
cauze care conduc la o nou initializarea a msurtorilor cinematice.
Corectitudinea si rapiditatea cu care se face initializarea este determinant n asigurarea unor
determinri precise si cu productivitate sporit.
1.7.2 Initializarea static
Pentru initializarea static se dispune de trei metode:
- prima metod presupune ca receptorul mobil (rover) s fie amplasat initial pe un punct A, cu
coordonate spatiale cunoscute, pe care va sta receptorul fix, determinnd n acest fel un vector
de pornire cunoscut. In acest fel ambiguitatea va putea fi calculat cu modelul diferentei duble
din relatia (1.82), cu valori reale, fixnd apoi ntregii;
- a doua metod de determinare a vectorului de pornire se poate realiza prin determinarea
acestuia prin metoda static;
- a treia metod const n interschimbarea (swap) antenelor receptorului fix cu cel mobil.
Dac n punctul A se afl receptorul fix (base) si n punctul B, pozitia de plecare a receptorului
mobil (rover). In aceast pozitie se pornesc ambele receptoare si se las s nregistreze cteva epoci si
apoi fr a se pierde contactul cu satelitii, antena si receptorul din punctul A se mut n punctul B si
receptorul si antena din B se mut n punctul A.Se las s achizitioneze fiecare dintre cele dou
receptoare pe noile pozitii, cteva epoci de msurtoare, n acest mod fiind posibil fixarea cu precizie a
vectorului de start n foarte scurt timp, de regul mai putin de 30 secunde. Practic, metoda
interschimbrii antenelor se complecteaz cu mutarea receptoarelor asupra punctului de pornire.
1.7.3 Initializarea cinematic
O alt aplicatie a utilizrii tehnologiei GPS cinematice, fr o initializare static prealabil, se
utilizeaz atunci cnd pozitionarea se realizeaz pentru un mobil n miscare (avion n zbor, autovehicule
n miscare, etc).
Metoda are la baz determinarea ambiguittilor de faze n miscare, metod denumit OTF (On
The Fly). Solutia necesit o determinare instantanee a ambiguittii de faze sau o pozitionare instantanee
pentru o singur epoc de msurtori.
CURS GEODEZIE SATELITARA
Capitolul 1.Sistemul de pozitionare GPS pag. 34
Principala problem este legat de identificare ct mai urgent a unei pozitii ct mai precis
determinate. Aceast metod se realizeaz prin declansarea procesului de calcul , pornindu-se de la
coordonate provizorii care se mbunttesc prin compensare prin metoda celor mai mici ptrate.
CURS GEODEZIE SATELITARA
Capitolul 2. Receptoare GPS pag.35
2. RECEPTOARE GPS
2.1 Generalitti
Receptoarele GPS reprezint practic principalacomponent a celui de al treilea segment al
Sistemului Global de Pozitionare, respectiv Segmentul Utilizator. Utilizatorii echpamentelor GPS care
receptioeaz semnalele transmise de satelitii din constelatia GPS pot fi mprtiti, dup domeniul de
activitate, n dou mari categorii: militari si civili. Domeniul militar reprezint de fapt pricipalul scop
pentru care a fost creiat NAVSTAR GPS. Senzori GPS sunt integrati n fiecare echipament militar:
vectori purttori, avioane, elicoptere, nave, blindate, iar fiecare infanterist comandant de grup este
dotat cu un navigator. ncepnd din anul 1985 GPS poate fi utilizat si de ctre civili si, rnd pe rnd,
majoritatea mbunttirilor aduse receptoarelor militare au devenit accesibile si au fost aplicate si pentru
receptoarele utilizate n domeniul civil.
2.2 Caracteristicile semnalului transmis de un satelit
Caracteristicile semnalului transmis de un satelit sunt:
- Frecventa fundamental: 10,23 MHz
- Frecventa semnalului purttor n banda L
1
=10,23 MHz x 154=1575,42 MHz
- Purttoarea L
1
este modulat prin dou coduri pseudoaleatoare (PRN) C/A si P
- Frecventa semnalului purttor n banda L
2
=10,23 MHz x 120=1227,60 MHz
- Purttoarea L
2
este modulat numai printr-un cod pseudoaleator (PRN) P
- Codul C/A (Coarse/Acquisition code, sau Civilian/Access - code) desemnat ca Serviciul de
Pozitionare Standard (SPS) cu frecventa: 1,023 MHz modulat pe unda purttoare L
1
- Secventa de cod PRN este diferit pentru fiecare satelit si se repet la fiecare 10
-3
sec.
- Codul P (Precision - code) desemnat ca Serviciul de Pozitionare Precis (PPS) cu frecventa:
10,23 MHz modulat pe undele purttoare L
1
si L
2
- Mesajul de navigatie (date cuprinznd efemeridele satelitilor, coeficientii de modelare a
ionosferei, starea satelitilor, baza de timp si corectiile ceasului) cu frecventa: 50 bps modulat
pe undele purttoare L
1
si L
2
Fig. 2.1 Semnale transmise de satelit
Acelasi tip de semnal este generat si de un receptor GPS, pe una sau pe dou unde, respectiv
aceleasi coduri C/A si P. n receptor se ncearc apoi corelarea celor dou semnale, cel generat si cel
receptionat, determinndu-se astfel: codurile si decalajul de timp dintre ele (observatii de cod) precumsi
CURS GEODEZIE SATELITARA
Capitolul 2. Receptoare GPS pag.36
mesajele de navigatie. Dup demodulare se poate determina diferenta de faz dintre semnalul generat si
cel receptionat (observatii de faz).
Codul C/A este accesibil tuturor utilizatorilor GPS.
Codul P este practic generat la frecventa ceasului satelitului si de aceea rezolutia lui este de zece
ori mai bun dect a codului C/A.
Pentru a preveni utilizarea de ctre neautorizati a semnalelor transmise de satelitii GPS s-au
folosit de-a lungul timpului diferite metode de degradare a semnalului sau de criptare a codurilor.
Disponibilitatea selectiv (SA) (capit 1.3.3.1) a semnalului a reprezentat o metod de alterare a
preciziei de pozitionare. Ea s-a fcut fie prin modificarea datelor efemeridelor (epsilon) satelitilor fie
prin usoara modificare a frecventei de ceas a satelitilor.
Aplicarea SA a luat sfrsit la 1 mai 2000.
Sistemul antibruiaj (AS) (capit. 1.3.3.2) reprezint o tehnic destinat evitrii bruiajului voit al
semnalului GPS cu un semnal apropiat de acesta care poate creea astfel confuzie si erori majore de
pozitionare pentru alti utilizatorii sau pentru tinte. Tehnica const n adugarea la codul P a unui cod
criptat W obtinndu-se astfel codul Y care nu poate fi utilizat dect de utilizatorii autorizati. Tehnica AS
este activ ncepnd de la 31 Ianuarie 1994.
2.3 Constelatia GPS
Nr.satelit se refer la numrul vehicolului spatial (SV), iar Nr.PRN se refer la codul
pseudoaleator unic pentru fiecare satelit.
Ceasurile atomice ale satelitilor sunt pilotate cu rubidiu (Rb) sau cu cesiu (Cs).
Constelatia GPS complet operational este compus din 18 sateliti n Blocul II/IIAsi 12 sateliti
n Blocul IIR, n total 30 de sateliti.
Satelitii 35 si 36 au montate la bord dispozitive reflectoare speciale (corner-cube) pentru
determinarea distantelor cu laser (Satellite Laser Ranging). Determinarea distantelor pn la sateliti n
acest mod permite analizarea diferentiat ntre erorile ceasurilor de la bord si erorile efemeridelor
satelitilor urmriti.
Nr.PRN al satelitului 32 a fost schimbat n 01 la 28-1-93.
Blocul II/IIA a fost proiectat pentru 7.5 ani cu o durat medie a misiunilor de 6 ani. Blocul IIR a
fost proiectat pentru 10 ani cu o durat medie a misiunilor de 7.5 ani.
Tabel 2.1 Satelitii disponibili
Nr. satelit Nr. PRN Tip Ceas Lansat Utilizabil Plan Orb. Not
17 17 Rb 11-12-89 6-1-90 D6
15 15
Bloc II
Cs 1-10-90 15-10-90 D5
24 24 Cs 4-7-91 30-8-91 D1 A
25 25 Cs 23-2-92 24-3-92 A2
26 26 Rb 7-7-92 23-7-92 F2
27 27 Rb 9-9-92 30-9-92 A4
32 01 Cs 22-11-92 11-12-92 F6
29 29 Rb 18-12-92 5-1-93 F5
31 31 Rb 30-3-93 13-4-93 C3
37 07 Rb 13-5-93 12-6-93 C4
39 09 Cs 26-6-93 20-7-93 A1
35 05 Cs 30-8-93 28-9-93 B4
34 04 Rb 26-10-93 22-11-93 D4
36 06
Bloc IIA
Cs 10-3-94 28-3-94 C1
CURS GEODEZIE SATELITARA
Capitolul 2. Receptoare GPS pag.37
33 03 Cs 28-3-96 9-4-96 C2
40 10 Cs 16-7-96 15-8-96 E3
30 30 Rb 12-9-96 1-10-96 B2
38 08 Cs 6-11-97 18-12-97 A3
43 13 Rb 23-7-97 31-1-98 F3
46 11 Rb 7-10-99 3-1-00 D2
51 20 Rb 11-5-00 1-6-00 E1
44 28 Rb 16-7-00 17-8-00 B3
41 14 Rb 10-11-00 10-12-00 F1
54 18 Rb 30-1-01 15-2-01 E4
56 16 Rb 20-1-03 18-2-03 B1
45 21 Rb 31-3-03 12-4-03 D3
47 22 Rb 21-12-03 12-1-04 E2
59 19 Rb 20-3-04 5-4-04 C3
60 23 Rb 23-6-04 9-7-04 F4
61 02
Bloc IIR
Rb 6-11-04 22-11-04 D1 B
Not:
A - Satelitul 24/PRN24 va fi mutat din planul orbital D1 pentru a face loc satelitului
61/PRN02.
B - Satelitul 61/PRN02 a fost lansat la 6 Noiembrie 2004 ora 05:39 UT si a devenit
operational la 22 Noiembrie 2004 ora 16:23 UT.
2.4 Satelitii geostationari SBAS (Satellite-Based Augmentation Systems)
Tabelul 2.2 Satelitii geostationari
SBAS Satelit Longitudinea orbitei Nr. PRN Not
Inmarsat-3-F2/AOR-E 15.5W 120 A
Artemis 21.5E 124 A
Inmarsat-3-F1/IOR-W 25E 126 B
EGNOS
Inmarsat-3-F5/IOR 64E 131 C
Inmarsat-3-F4/AOR-W 54W 122
WAAS
Inmarsat-3-F3/POR 178E 134
EGNOS=European Geostationary Navigation Overlay System
WAAS=Wide Area Augmentation System
Not:
A-Transmisii test intermitente.
B-Semnal test industrial.
C-Transmisii test pentru sistemul EGNOS n modul 2 fr distante.
2.5 Structura unui receptor GPS:
Un receptor GPS are n compunere dispozitive pentru receptia semnalului si pentru procesarea
acestuia.
CURS GEODEZIE SATELITARA
Capitolul 2. Receptoare GPS pag.38
2.5.1 Antena
Fig. 2.2. Schema receptiei si procesrii semnalului satelitar
O anten omnidirectional receptioneaz semnale de la satelitii GPS situati deasupra orizontului.
Majoritatea antenelor folosite astzi sunt antene de tip microstrip sau quad. Punctul de referint pentru o
anten GPS l reprezint centrul de faz. Cel mai important criteriu n proiectarea antenelor l constituie
sensibilitatea centrului de faz. n unele cazuri centrul de faz poate diferi, ca pozitie, de centrul
geometric (mecanic) al antenei. n timpul msurtorilor centrul mecanic si punctul de statie trebuie s se
afle pe aceeasi vertical. Antenele se caracterizeaz prin parametrii tehnici constructivi: frecventele
receptionate, pozitia centrului de faz fat de centrul mecanic, corectiile de elevatie si azimut ale
centrului de faz, temperaturile de lucru. Pentru micsorarea influentei efectului mutipath si nlturarea
reflexiilor semnalului s-au proiectat modele speciale de antene, cea mai cunoscut fiind antena tip
Choke-Ring. Antenele pot fi proiectate numai pentru unda L
1
sau pentru L
1
si L
2
, precum si pentru
receptionarea semnalelor DGPS. De asemenea n functie de modul cum este integrat n echipamentul
GPS antena poate fi intern sau extern. Semnalul este apoi preamplificat, filtrat si trimis blocului de
radio frecvent.
2.5.2 Blocul de radio frecvent
n blocul de radio frecvent se realizeaz n primul rnd demodularea semnalului de coduri
procesndu-se una sau dou frecvente n functie de tipul receptorului. Semnalele sunt apoi preluate pe
canale separate pentru fiecare satelit receptionat. Numrul de canale reprezint o caracteristic
important pentru un receptor GPS.
Primele receptoare GPS aveau un
numr limitat de canale si urmreau
satelitii secvential. Acum receptoarele
au un numr suficient de canale care
permit urmrirea continu
(continuously tracking) a semnalelor
satelitilor. Elementele de baz ale
blocului de radio frecvent sunt
oscilatoarele care genereaz frecventele
de referint, filtrele pentru eliminarea frecventelor nedorite si mixerele. Simplificat, principiul este
urmtorul: dou oscilatii de amplitudini si frecvente diferite sunt multiplicate rezultnd un semnal cu
Fig. 2.3. Anten GPS
CURS GEODEZIE SATELITARA
Capitolul 2. Receptoare GPS pag.39
dou componente, una de nalt si una de joas frecvent. Se aplic apoi un filtru trece-jos, iar semnalul
de joas frecvent care rmne este utilizat n continuare. Pentru executarea msurtorile de faz se
utilizeaz dou metode diferite: tehnica de corelare a codurilor, care necesit cunoasterea unui cod PRN
si tehnica independent de cod, care se bazeaz pe ridicarea la ptrat a semnalului. Un avantaj al ultimei
metode l reprezint faptul c nu mai sunt necesre informatii legate de ceasul satelitului sau de
elementele orbitei acestuia. Ambele metode reconstruiesc unda purttoare nemodulat de la care se
ncepe msurarea fazei. Pentru a putea obtine ambele purttoare chiar si n absenta codului P, n multe
receptoare se aplic o metod hibrid: purttoarea L
1
este reconstituit prin corelarea codurilor utiliznd
codul C/A, iar purttoarea L
2
este reconstituit prin metoda independent de cod. n cazul receptoarelor
profesionale semnalul de la anten este separat printr-un deplexor si transmis modulului de prelucrare
analogic. Acesta const practic n dou receptoare separate pentru L
1
, respectiv pentru L
2
, care asigur
deconversia, filtrarea si n final digitalizarea semnalului. Procesarea pe L
1
se face ncepnd cu codul
C/A. Att pseudodistantele ct si msurtorile de faz sunt determinate prin corelarea cu codul C/A
local. Se proceseaz apoi codul P, dac nu este criptat, determinndu-se pseudodistantele si msurtorile
de faz prin corelarea cu codul P local. n final, dac AS este activ msurtorile de faz se obtin din
corelarea codului C/A, iar pseudodistantele vor fi derivate cu ajutorul codului P-ajuttor (P-Code aided)
generat de receptor. Procesarea pe L
2
se face n functie de starea AS. Dac nu este activ se determin
pseudodistantele si msurtorile de faz prin corelarea cu codul P local. Dac este activ msurtorile de
faz si pseudodistantele vor fi derivate cu ajutorul codului P-ajuttor (P-Code aided) generat de
receptor. Metoda codului P-ajuttor a fost aplicat prima dat de Magnavox n 1990.
2.5.3 Microprocesorul
Microprocesorul controleaz ntregul sistem permitnd navigatia si obtinerea coordonatelor
antenei n timp real.
2.5.4 Blocul de control
Blocul de control permite comunicarea interactiv cu receptorul. La majoritatea receptoarelor
acest dispozitiv include tastatura si ecranul pe care sunt afisate informatii de stare ale receptorului si
satelitilor.
2.5.5 Blocul de stocare a datelor
Stocarea observatiilor si a mesajelor de navigatie se face de obicei pe suporturi magnetice
amovibile (cartele PCMCIA sau CF) si mai rar pe memorii interne, caz n care este necesar si existenta
unui port de comunicare pentru date.
2.5.6 Blocul de alimentare
Majoritatea receptoarelor dispun de surse de alimentare intern, baterii de acumulatori
rencrcabili NiCd, NiMh sau LiIon care asigur o autonomie de cel putin 6-8 ore. De obicei exist si
posibilitatea conectrii unor acumulatori externi sau a unor surse de curent continuu n cazul
receptoarelor de la statiile permanente de referint.
2.6 n functie de mrimile obsevabile cu care pot opera, receptoarele GPS se pot clasifica
astfel:
2.6.1. Receptoare care opereaz cu codul C/A.
Aceste receptoare fac parte din categoria celor numite n mod curent navigatoare. Receptionarea
semnalelor de la sateliti se face pe 4 pna la 12 canale. Determinarea pozitiei de face fie n sistem
CURS GEODEZIE SATELITARA
Capitolul 2. Receptoare GPS pag.40
bidimensional (2D), latitudine, longitudine, fie n sistem tridimensional (3D), latitudine, longitudine si
altitudini elipsoidale pe elipsoidul WGS84. De asemenea pozitia mai poate fi prezentat si sub form de
coordonate UTM, UPS, etc. Precizia de pozitionare n cazul acestor receptoare este n medie de
aproximativ 15m (Estimated Position Error). Multe dintre receptoare au posibilitatea nregistrrii
traseelor navigate si memorrii coordonatelor unui numr limitat de puncte ntr-o memorie intern care
apoi, prin intermediul unui port de comunicare, poate fi descrcat.
2.6.2. Receptoare care opereaz cu codul C/A si msurtori de faz pe unda purttoare L
1
.
Majoritatea acestor receptoare au 12 canale. Precizia de pozitionare a acestor receptoare este
mult imbunttit prin msurtorile de faz ajungnd pn la 5m (EPE). De asemenea aceste receptoare
pot stoca n memorie mrimile msurate. Prin postprocesarea ulterioar a datelor precizia de
determinare este substantial mbunttit.
2.6.3. Receptoare care opereaz cu codul C/A si msurtori de faz pe L
1
si L
2
.
Prin tehnici speciale aceste receptoare msoar si faza purttoarei L
2
aplicnd un procedeu de
multistratificare a semnalului care are ca efect restabilirea fazei undei purttoare la jumtate din
lungimea de und. Codul P nu trebuie cunoscut deoarece el se pierde la procesare. Faza purttoarei L
2
este apoi folosit n combinatie cu L
1
pentru reducerea influentei ionosferei asupra semnalului. Acest
lucru duce la o crestere substantial a preciziei de determinare a bazelor lungi.
2.6.4. Receptoare care opereaz cu codul C/A, codul P (Y) si msurtori de faz pe unda
purttoare L
1
.
Proiectat initial pentru aplicatii militare, din 1989 accesibil si utilizatorilor civili, acest tip de
receptor este capabil s msoare cu precizie decimetric baze lungi de pn la 100km sau baze cu
lungimi medii (20km) n mai putin de dou ore.
2.6.5. Receptoare care opereaz cu codul C/A, codul P (Y) si msurtori de faz pe L
1
si L
2
.
Aceste receptoare nglobeaz tehnologia de vrf n ceea ce priveste componentele constructive
ct si metodele cele mai avansate de filtrare si procesare a semnalului. Toate acestea conduc la
determinarea rapid a bazelor mari (80 100 km) cu precizii centimetrice.
n afar de capacittile de receptie si prelucrare a semnalului enumerate anterior, receptoarele
GPS pot avea diverse alte mbunttiri constructive pentru cresterea performantelor:
Posibilitatea receptionrii corectiilor diferentiale DGPS transmise prin radio, GSM sau Internet
de la statii fixe permanente.
Posibilitatea receptionrii corectiilor diferentiale transmise de satelitii geostationari din retelele
WAAS sau EGNOS.
2.7 Clasificarea receptoarelor GPS n functie de precizia asigurat.
2.7.1.Navigatoare
Denumite generic GPS-uri de mn (handheld GPS) aceste
receptoare lucrez numai cu codul C/A modulat pe L
1
.
Receptionarea semnalelor se face pe 8 12 canale. Precizia lor este
de 15m EPE. Majoritatea modelelor mai noi au si posibilitatea
receptionrii corectiilor DGPS de la statii terestre sau de la satelitii
din retelele WAAS sau EGNOS. n acest caz se observ o crestere
semnificativ a preciziei 1-3m. Pe lng functia clasic de navigare
aceste receptoare mai prezint o serie ntreag de facilitti cum sunt:
CURS GEODEZIE SATELITARA
Capitolul 2. Receptoare GPS pag.41
memorarea coordonatelor si atributelor pentru un numr limitat de puncte, nregistrarea traseelor
navigate (coordonate, altitudine, azimute, vitez, timp), busol electronic, altimetru, calculator
astronomic, dirijarea pilotului automat, etc. Alimentarea se face fie cu acumulatori fie de la surse
externe. Antena poate fi ncorporat sau extern detasabil. Transferul de date n si din memoria intern
a navigatorului se face prin intermediul unui port de comunicatii. Exist echipamente dedicate utilizrii
pentru autovehicole (automotive GPS) sau pentu ambarcatiuni (marine GPS).
Productor Model Nr.Canale Semnal Precizie
Start
rece
Start
cald
Reluare Antena
Garmin eTrex 12 L
1
, cod C/A 15m 45s 15s 2min Intern
GPS12 12 L
1
, cod C/A 15m 45s 15s 2min Intern
GPSIII+ 12 L
1
, cod C/A 15m 45s 15s 2min
Detasabil
Quad Helix
GPSMAP 76S
12
WAAS
L
1
, cod C/A 15m-3m 45s 15s 2min
Intern
Quad Helix
Thales SporTrak
12
WAAS,
EGNOS,
MSAS
L
1
, cod C/A 3m 2min 15s 15s
Intern
Quad Helix
SporTrak Topo
12
WAAS,
EGNOS,
MSAS
L
1
, cod C/A 3m 2min 15s 15s
Intern
Quad Helix
Trimble GeoXT
12
WAAS
L
1
, cod C/A
L
1
, faz
3m 60s 20s 5s Intern
2.7.2.OEM
Aceste receptoare numite de obicei motoare GPS (GPS engine) sunt proiectate pentru a intra n
componenta unor sisteme complexe care au nevoie fie de determinarea n mod continuu a pozitiei n
care se afl la un moment dat fie au nevoie de un semnal de timp foarte precis si sincronizat.
Receptoarele au ntre 12 si 24 de canale si lucreaz att cu codul C/A ct si cu msurtori de faz pe L
1
,
iar unele dintre ele si pe L
2
. Exist si pentru acest tip de receptoare posibilitatea de a receptiona corectii
diferentiale DGPS sau SBAS, iar unele dintre ele pot receptiona si procesa si semnalele de la satelitii
GLONASS. Precizia acestor receptoare variaz de la 5-8m n cazul navigatiei pn la centimetri n
cazul postprocesrii diferentiale. Aceste receptoare sunt produse n diferite forme: cip GPS (chipset)
si/sau modul GPS (board) pentru aplicatii OEM, receptor atasabil direct la un port USB, receptor
integrat Compact Flash, receptor integrat Mini-Mouse, receptor atasabil la PDA, receptor atasabil via
Bluetooth
CURS GEODEZIE SATELITARA
Capitolul 2. Receptoare GPS pag.42
a) b) c) d)
Fig. 2.4. Componente GPS
Tabelul 2.4 Receptoare OEM
Productor Model Nr.Canale Semnal Precizie
Start
rece
Start
cald
Reluare Antena
CSI Wireless Evolution OEM
12
SBAS
L
1
, cod C/A
L
1
, faz
10m-2m 50s 5s 2s Banda L
Matsushita SD Card GPS 12 L
1
, cod C/A 10m 1min 45s 8s Patch
CF Card GPS 12 L
1
, cod C/A 10m 1min 45s 8s Patch
Motorola MG4100 Chip 12 L
1
, cod C/A 10m-5m 40s 36s 1s Activ
u-blox
RCB-LJ GPS
Receiver Board
16
DGPS,
WAAS,
EGNOS
L
1
, cod C/A 3m-2m 34s 33s 1s Activ
2.7.3. Receptoare profesionale topografice L1 cod si faz
Aceste receptoare proceseaz codurile C/Asi P si fac de asemenea
msurtori de faz pe L
1
. Precizia lor se ncadreaz ntre 5m (autonom),
25cm (timp real-diferential) si 1cm+2ppm (postprocesare diferential).
Receptoarele au ntre 12 si 20 de canale, unele dintre ele avnd
posibilitatea de a receptiona si procesa si semnalele de la satelitii
GLONASS. Pot lucra si n timp real, cu corectii diferentiale receptionate
prin modem sau telefon GSM. Pot avea antena ncorporat n aceeasi
carcas cu receptorul, tastatura, ecranul si bateriile, sau toate sau o parte
din aceste componente pot fi separate si conectate ntre ele prin cabluri sau
porturi infrarosii sau Bluetooth.
Tabelul 2.5. Receptoare topografice
Productor Model Nr.Canale Semnal Precizie
Start
rece
Start
cald
Reluare Antena
Leica SR510 12
L
1
, cod C/A
Cod P, faz
5m-25cm
1cm+2ppm
3min 45s 10s
AT501
DGPS
GX1210
12
WAAS,
EGNOS
L
1
, cod C/A
Cod P, faz
5m-25cm
1cm+1ppm
1min 30s 3s
AX1201
DGPS
Sokkia Stratus 12
L
1
, cod C/A
Cod P, faz
2.5m-1m
5mm
2min 45s 3s Intern
Thales ProMark2
12
WAAS,
EGNOS,
MSAS
L
1
, cod C/A
Cod P, faz
3m-1m
1cm+1ppm
90s 15s 15s Quad Helix
Topcon Legacy-E G 40 L
1
, cod C/A 3m-30cm 60s 10s 1s Extern
Fig. 2.5. Tipuri de
receptoare GPS
CURS GEODEZIE SATELITARA
Capitolul 2. Receptoare GPS pag.43
Productor Model Nr.Canale Semnal Precizie
Start
rece
Start
cald
Reluare Antena
Cod P 15mm H
20mm V
Trimble
4600LS
Surveyor
12
L
1
, cod C/A
Faz
5m-20cm
1cm+1ppm
90s 30s 15s
Intern
Microstrip
2.7.4 Geodezice L1, L2 cod si faz
Receptoarele din aceast categorie utilizeaz codurile C/Asi P (respectiv Y att timp ct AS este
activ) si fac msurtori de faz pe L
1
si L
2
. Receptoarele au 12 40 canale care permit receptionarea
semnalelor de la satelitii GPS, GLONASS, WAAS, EGNOS, MSAS. Precizia lor este de 5m (autonom),
5cm (timp real-diferential) si 5mm+0.5ppm (postprocesare diferential).
Fig. 2.7 Tipuri de receptoare GPS - geodezice
Receptoarele pot lucra n timp real, cu corectii diferentiale receptionate prin modem sau telefon
GSM. Constructiv, receptoarele pot fi compacte, antena, receptorul, tastatura, ecranul si bateriile
ncorporate n aceeasi carcas, sau componentele pot fi separate si conectate ntre ele prin cabluri sau
porturi cu infrarosu sau Bluetooth.
Fig. 2.6. Tipuri de receptoare GPS+
componente topografice
CURS GEODEZIE SATELITARA
Capitolul 2. Receptoare GPS pag.44
Fig. 2.8. Componente GPS
Productor Model Nr.Canale Semnal Precizie
Start
rece
Start
cald
Reluare Antena
Leica SR530 24
L
1
, cod C/A
Cod P, faz
L
2
, Cod P, faz
5m-25cm
1cm+1ppm
5mm+0.5ppm
3min 45s 10s
Extern
AT502
GX1230
24
WAAS,
EGNOS
L
1
, cod C/A
Cod P, faz
L
2
, Cod P, faz
5m-25cm
1cm+1ppm
3mm+0.5ppm
1min 30s 3s
Extern
AX1202
Sokkia GSR2650 12
L
1
, cod C/A
Faz
L
2
, faz
1.8m-45cm
1cm
5mm
50s 40s 0.5s
Extern
SK-600
Thales ZX-Sensor 24
L
1
, cod C/A
Cod P, faz
L
2
, Cod P, faz
3m
1cm+2ppm
5mm
150s 15s 5s Extern
Topcon Odyssey-E GGD
40
GPS si
GLONASS
L
1
, cod C/A
Cod P, faz
L
2
, Cod P, faz
3m-30cm
10mm H
15mm V
60s 10s 1s Extern
Trimble GPS 5800
24
WAAS,
EGNOS
L
1
, cod C/A
Cod P, faz
L
2
, Cod P, faz
5m-25cm
10mm
5mm
60s 30s 15s
Intern
Zephyr
2.8.Statii permanente
Receptoarele folosite pentru statii permanente se ncadreaz n categoria
celor care fac msurtori de cod si faz pe ambele frecvente L
1
si L
2.
Antenele utilizate n acest caz sunt de tipul choke ring (Dorne & Margolin
model IGS). Receptoarele au posibilitatea conectrii la senzori meteosi la
senzori de nclinare. De asemenea sunt prevzute cu un port special
pentru generarea semnalului de timp. Majoritatea receptoarelor au
posibilitatea conectrii directe la retele locale (LAN) sau la Internet.
Transmisia datelor, respectiv stocarea
lor, se poate face fie direct, fie prin
intermediul conectrii la un PC.
Administrarea statiei poate fi fcut
fie local, fie de la distant (remote
control) prin intermediul programelor
specializate.
Un caz special l constituie
receptoarele montate solitar cu
elementele podurilor, cldirilor,
constructiilor hidrotehnice, pentru urmrirea n timp real a deplasrilor acestora. Tot aici trebuie
mentionate statiile permanente de monitorizare a deplasrilor crustale.
Tabelul 2.7. Receptoare GPS
Productor Model Nr.Canale Semnal Precizie
Start
rece
Start
cald
Reluare Antena
Leica RS500 CORS 24
L
1
, cod C/A
Cod P
L
2
, Cod P
30 cm
3mm+0.5ppm
3min 45s 10s
Extern
AT504 IGS
GRX 1200 Pro
24
WAAS,
EGNOS
L
1
, cod C/A
Cod P, faz
L
2
, Cod P, faz
5m-25cm
1cm+1ppm
3mm+0.5ppm
1min 30s 3s
Extern
AT504 IGS
Thales iCGRS 24
L
1
, cod C/A
Cod P, faz
L
2
, Cod P, faz
3m-1m
3mm
120s 30s 4s
Extern
Choke Ring
CURS GEODEZIE SATELITARA
Capitolul 2. Receptoare GPS pag.45
Fig. 2.9 Componente GPS
2.9.Controlul utilajelor
Pentru ghidarea utilajelor terasiere sau agricole se utilizeaz
receptoare simpl sau dubl frecvent care lucreaz n timp real.
Receptoarele au 12 24 de canale iar precizia de pozitionare este de
1 30cm (timp real-diferential). Cu ajutorul programelor specializate
si a servomecanismelor se poate asigura deplasarea utilajelor pe
traiectorii predefinite sau executarea spturilor si/sau umpluturilor
pn la cotele stabilite.
Tabelul 2.8
Productor Model Nr.Canale Semnal Precizie
Start
rece
Start
cald
Reluare Antena
Leica MC500 24
L
1
, cod C/A
Cod P
L
2
, Cod P
30 cm
3mm+0.5ppm
3min 45s 10s
Extern
AT502
2.10. Sisteme inertiale
Acestea sunt de fapt
sisteme de 2-4 receptoare GPS
dubl frecvent integrate n aceeasi
carcas. Msurtorile de cod si
faz preluate de la 2-4 antene si
prelucrate simultan asigur
determinarea orientrii, respectiv a
orientrii si pozitiei ntr-un sistem tridimensional. Sistemul poate lucra n timp real sau n mod DGPS
pentru determinarea cu precizie a pozitiei sau a vitezei.
Tabelul 2.9
Productor Model Nr.Canale Semnal Precizie
Start
rece
Start
cald
Reluare Antena
Javad JNSGyro-2
2 x 20 GPS
(GLONASS)
L
1
, cod C/A
Cod P
L
2
, Cod P
3m-1cm 60s 10s 1s
Sistem de 2
antene externe
JNSGyro-4
4 x 20 GPS
(GLONASS)
L
1
, cod C/A
Cod P
L
2
, Cod P
3m-1cm 60s 10s 1s
Sistem de 4
antene externe
2.11. Sisteme mixte
Sistemul Leica SmartStation este format dintr-o statie total din seria
TPS1200 la care este atasat, coaxial cu axa vertical, modulul ATX1230
SmartAntenna. ATX1230 SmartAntenna este de fapt un receptor GPS, RTK
dubl frecvent, care se integreaz si comunic cu statia total. Toate setrile,
comenzile, afisajul, functiile, operatiile si calculele specifice unui receptor GPS
sunt integrate n procesorul, tastatura si afisajul statiei totale. n acest mod cele
dou instrumente, TPS si GPS, sunt perfect integrate si permit executarea unor
lucrri cu un grad foarte mare de precizie si independent.
Productor Model Nr.Canale Semnal Precizie
Start
rece
Start
cald
Reluare Antena
Leica SmartStation
24
WAAS,
EGNOS
L
1
, cod C/A
Cod P, faz
L
2
, Cod P, faz
5m-25cm
1cm+1ppm
3mm+0.5ppm
1 min 30 s 3 s
Integrat
ATX1230
Fig. 2.10. Receptoare GPS
a)
b)
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.46
3. SISTEME DE COORDONATE UTILIZATE N TEHNOLOGIA GPS
Tehnolgia GPS este de obicei asociat cu sistemul de coordonate WGS 84. Acest sistem este un
sistem tridimensional elipsoidal si are ca baz elipsoidul WGS 84.
Receptoarele GPS colecteaz informatii de la satelit. n urma prelucrrii semnalului primit de la
sateliti (Capitolul 6) coordonatele rezult pe elipsoidul WGS 84. n tara noastr, dup cum este bine
cunoscut, se utilizeaz sistemul de coordonate Stereografic 1970. Acest sistem are ca elipsoid de baz,
elipsodul Krasovski. n acest capitol sunt trecute n revist doar sistemele de coordonate, transformrile
de coordonate fiind de fapt un alt capitol. Primul pas spre ajungerea la sistemul de coorodonate
Stereografic 1970 const n trecerea coordonatelor de pe elipsoidul WGS 84 pe elipsoidul Krasovski.
Sigur c dup ce sunt aduse pe elipsoidul Krasovski, acestea pot fi proiectate si pe alte plane, cunoscute
si la noi cum ar fi Gauss fus de 6 sau Gauss fus de 3, UTM, etc. n cazul sistemelor locale, trecerea se
face de obicei prin sistemul Stereografic 1970 sau Gauss pe baza unor puncte comune.
n cazul acestui curs vom prezenta sistemele de coordonate tridimensionale natural si elipsoidal,
sistemele plane Stereografic 1970, Gauss Kruger si UTM.
3.1 Sisteme de coorodonate naturale
Termenul natural defineste suprafata de referint a sistemului de coorodonate, n cazul nostru
Geoidul. De asemenea, mrimile care definesc sistemul sau coordonatele sunt referite tot n functie de
elemente naturale (latitudine si longitudine astronomic). Acest sistem de coordonate nu este folosit n
calculele geodezice deoarece suprafata de referint, geoidul, este greu calculabil (Volumul I, Capitolul
2.2). Din acest motiv, n mod frecvent se utilizeaz ca suprafat de referint elipsoidul de rotatie sau
sfera de raz medie Gauss.
3.1.1. Sistemul de coordonate cartezian geocentric
Sistemul de coordonate cartezian geocentric (Figura 3.1) are ca suprafat de referint geoidul.
Este sistemul de coorodonate fundamental al geodeziei. Este un sistem de coordonate tridimensional
rectangular cu centrul n centrul de mas al Pmntului. Pozitia unui punct oarecare P de pe suprafata
Pmntului este definit att n sistem tridimensional ct si n coordonate astronomice. Cele trei axe
rectangulare sunt:
- Axa Z este axa polilor;
- Axa X este n planul ecuatorului si intersecteaz meridianul 0;
- Axa Y este perpendicular pe celelalte dou, situat n planul ecuatorului, cu sensul
pozitiv spre est.
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.47
Figura 3.1. Principalele sisteme de coordonate naturale. Sistemul de coordonate natural
Coordonatele astronomice sunt:
- latitudinea astronomic, notat u;
- longitudinea astronomic, notat A.
Pentru a defini pozitia punctului nu pe geoid ci pe suprafata terenului, acestor dou coorodonate
li se adaug altitudinea ortometric, notat H
OR
.
Latitudinea astronomic, u, a punctului S este unghiul format de verticala punctului S cu planul
ecuatorial al geoidului. Longitudinea astronomic, A, este unghiul diedru format de meridianul
astronomic al punctului Greenwich cu meridianul punctului S. Altitudinea ortometric, H
OR
, este
diferenta pe vertical, msurat pe verticala locului, dintre punctul S de pe suprafata terenului si punctul
n care verticala punctului S nteap geoidul. Fizic, verticala unui punct oarecare S este dat de firul cu
plumb. Toate observatiile geodezice sunt referite la verticala locului, care trebuie s coincid cu axa
vertical a oricrui aparat geodezic (statie total, receptor GPS, nivel) amplasat n punctul respectiv.
3.1.2. Sistemul astronomic local.
Sistemul de coordonate prezentat mai sus este un sistem tridimensional si nu poate fi utilizat n
lucrrile topografice curente. Pe ntinderi mici este nevoie ca suprafetele de teren s fie prezentate pe
planuri. Orice suprafat de teren este de la sine nteles c este o calot sferic. n momentul proiectrii
pe un plan se produc anumite rupturi, apar anumite erori pe distante, pe unghiuri, n calculul
suprafetelor. Dac planul pe care se proiecteaz suprafata de interes este tangent la suprafata respectiv
(o suprafat mic), atunci deformatiile datorate proiectiei sunt minime. Planul nou creat trebuie s aib
un sistem de coordonate local plan bine definit. De asemenea, trebuie definit datumul de referint
(Capitolul 6 din Cursul de topografie geodezie, Volumul II). Ca punct fundamental sau de origine al
sistemului de coordonate (topocentru) poate fi ales punctul P de pe suprafata pmntului. Oricare punct
Z
T
Z
CTS
CIO
Y
T
X
T
Y
CT
S
M
S{
X
t
Y
t
Z
t
B
S
L
S
or
S
H
0
S
or
S
H
A
S
u
S
u
G
P
n
X
CTS
(GAM) Geoidul
sfer concentric
cu Sfera Cereasc
urma meridianului
instantaneu al
punctului S
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.48
de pe suprafata fizic a Pmntului poate deveni origine a unui sistem de coordonate (topocentru).
Acest nou sistem de coordonate (Figura 3.1), astronomic local, are axele definite astfel:
- planul orizontal x
a
y
a
este perpendicular pe directia gravittii;
- axa x
a
este situat n meridianul local al punctului P (originea sistemului), deci cu sensul
pozitiv spre nordul geografic;
- axa y
a
are sensul pozitiv spre estul astronomic si este perpendicular att pe axa x
a
ct si pe
directia gravittii;
- altitudinea, H
OR
, definit si mai sus, este ndreptat dup tangenta la directia gravittii, cu
sensul pozitiv ctre zenitul astronomic.
Orice alt punct din vecintatea punctului P si vizibil din acest punct, poate fi determinat n acest
sistem de coordonate prin msurtori clasice (directii, distante, unghiuri zenitale) sau GPS. Msurtorile
clasice sunt denumite si coordonate astronomice polare locale:
- D - distanta nclinat dintre cele dou puncte;
- o- azimutul astronomic al punctului de statie n raport de punctul nou, R;
- ,- unghiul zenital, format ntre verticala locului punctului P si directia PR;
Coordonatele astronomice polare locale care definesc pozitia punctului nou R n sistemul
astronomic local pot fi transformate n coordonate naturale locale, respectiv x
a
y
a
H
OR
, pentru punctul R.
0
0
0
0
cos
sin sin
sin cos
,
, o
, o
= = D
Z
Y
X
X
a
a
a
a
(3.1)
3.2 Sisteme de coordonate conventionale
Dup cum am precizat anterior, n practica geodezic, geoidul este nlocuit cu un elipsoid de
rotatie. Alegerea unui elipsoid de rotatie nu se face ntmpltor. Este necesar ca elipsoidul ales s fie
foarte apropiat de geoid n zona de interes. n prezent se utilizeaz elipsoidul WGS84 care aproximeaz
cel mai bine geoidul si este utilizat de toate trile care efectueaz determinri GPS.
3.2.1 Ecuatiile parametrice ale elipsoidului de rotatie.
Elipsoidul de referint, adic elipsoidul folosit la un moment dat, ntr-o tar sau mai multe tri,
pentru rezvolvarea problemelor geodezice, este un elipsoid de rotatie cu turtire mic la poli.
P
P
/
A
W
C
L
B
O
x
X
Y
S
/
o
H nor ma|a |a o||pso|d
E
S
Z
X
(
n
o
r
d
g
o
o
d
o
z
|c
)
g
Z
(
z
o
n
|t
g
o
o
d
o
z
|c
)
g
Y
( ost goodoz|c)
g
S
/ /
A
/
/
R
/ /
R
A
0
o
,
E
Fig. 3.2 Principalele sisteme de coordonate naturale. Sistemul de coordonate elipsoidal
Ecuatia general a unui elipsoid de rotatie, exprimat sub form impicit:
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.49
0 1
b
Z
a
Y X
2
2
2
2 2
= +
+
(3.2)
este putin folosit n geodezia elipsoidal.
Parametrii geometrici prin care se poate defini, geometric, un elipsoid de rotatie sunt:
Z
O W
Y
X
E
S
/ / /
S
/ /
S
/
P
/
n
E
P
S
B
L
r
a
z=Z
S
Z
s
B
r =x
S
/ / /
O
x
9
O
B
b
Fig. 3.3 Semiaxa mare (raza ecuatorial)
OW OE a = = - semiaxa mic; (3.4)
/
OP OP b = = - turtirea (geometric); (3.5)
2 2
b a E = - excentricitatea liniar; (3.6)
2
2 2
a
b a
e
= - prima excentricitate (numeric); (3.7)
2
2 2
/
b
b a
e
= - a doua excentricitate (numeric); (3.8)
2
2
b
a
c = - raza de curbur polar. (3.9)
Primii trei parametri se mai numesc si parametri geometrici principali.
Definirea elipsoidului de rotatie se face prin doi parametri geometrici (din cei mentionati), dintre
care unul trebuie s fie liniar.
n tabelul 3.1 se prezint valorile numerice ale parametrilor a si f pentru elipsoizii de referint
care au fost utilizati n decursul anilor n tara noastr, precumsi pentru elipsoidul recomandat de AIG n
anul 1980.
Tabelul 3.1 Elipsoizi de referint folositi n Romnia
Denumirea elipsoidului
de referint
Anul
determinrii
Semiaxa mare a
[m]
Turtirea
numeric
f
Perioada de
utilizare n
Romnia
Bessel 1841 6 377 397,115 1:299,1528 1873-1916
Clarke 1880 6 378 243,000 1:293,5 1916-1930
Hayford 1909 6 378 388,000 1:297,0 1930-1951
Krasovski 1940 6 378 245,000 1:298,3 1951-prezent
Sistemul geodezic de
referint 1980
1980 6 378 137,000 1:298,257 -
WGS - 84 1,984 6 378 137,000 1:298,25722 1990-prezent
Relatiile principale de legtur dintre parametrii geometrici ai elipsoidului de rotatie sunt:
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.50
, )
n
n
a f a b
' +
'
= =
1
1
1 (3.10)
, )
2 2 2
1 e a b = (3.11)
2
2
1
1
1 1 1
e
e f
+
= = (3.12)
2
2
2 2
1
2
e
e
f f e
' +
'
= = (3.13)
2
2
2
2
2
1 1
2
e
e
f
f f
e
= ' (3.14)
a
E
e = (3.15)
b
E
e = ' (3.16)
Prin dezvoltri n serie se obtine de asemenea:
...
8
3
4
...
8 2
4 2 4 2
+
'
'
= + + =
e e e e
f (3.17)
n geodezia elipsoidal se opereaz frecvent cu ecuatiile parametrice, n functie de coordonatele
B si L, adic:
X = X (B, L);
Y = Y (B, L);
Z = Z (B, L).
Pentru deducerea acestora este util s se determine, n prealabil, ecuatiile parametrice ale elipsei
meridiane:
x = x (B); z = z (B),
deoarece legtura dintre coordonatele X, Y, Z si respectiv x, z (fig. 3.2) este imediat:
X = x cos L; Y = x sin L; Z = z. (3.18)
Ecuatia elipsei meridiane sub form implicit este:
, ) 0 1
b
z
a
x
z , x f
2
2
2
2
= + = (3.19)
sau, n functie de (3.11):
, ) 0 a
e 1
z
x z , x f
2
2
2
2
=
+ = (3.20)
Coeficientul unghiular al tangentei la elips n punctul S (fig. 3.2, b) poate fi exprimat sub
forma:
, ) B ctg B 90 tg
dx
dz
= + = (3.21)
sau sub forma:
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.51
, )
z
x e 1
f
f
dx
dz
2
x
z
=
'
'
= (3.22)
Din egalarea ultimelor dou relatii rezult:
B sin e 1
B cos a
x
2 2
= (3.23)
Introducnd expresia (3.23) n (3.20) se obtine:
, )
B sin e 1
B sin e 1 a
z
2 2
2
= (3.24)
iar, n continuare, din relatia (3.23):
+ = cos
n
(3.25)
Ultimele dou relatii reprezint ecuatiile parametrice ale elipsei meridiane n functie de
latitudinea geodezic B. Pentru scrierea mai concentrat a acestor ecuatii, precum si pentru usurarea
calculelor practice, se folosesc frecvent urmtoarele functii auxiliare:
B sin e 1 W
2 2
= (3.26)
2 2 2
1 B cos e 1 V + = ' = (3.27)
unde:
B cos e' = (3.28)
Folosind relatiile de legtur dintre parametrii elipsoidului de referint (3.10) - (3.17), rezult:
V
c
W
a
= (3.29)
n acest mod, ecuatiile parametrice ale elipsei meridiane (3.24) si (3.25) se pot exprima si sub
forma:
, ) , )
V
B sin e 1 c
W
B sin e 1 a
z
V
B cos c
W
B cos a
x
2 2
=
= =
(3.30)
Utiliznd aceste ecuatii, precumsi relatiile (3.18) rezult ecuatiile parametrice ale elipsoidului
de rotatie:
, ) , )
V
B sin e 1 c
W
B sin e 1 a
Z
V
L sin B cos c
W
L sin B cos a
Y
V
L cos B cos c
W
L cos B cos a
X
2 2
=
= =
= =
(3.31)
3.2.2. Sistemul global elipsoidal.
Sistemul global elipsoidal este similar cu sistemul cartezian global geocentric. Originea
sistemului este n imediata apropiere a centrului sistemului cartezian global geocentric, respectiv ct
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.52
mai aproape de centrul de mas al Pmntului. De asemenea, cele trei axe de coordonate sunt apropiate
pn la coincident cu axele de coordonate ale sistemului cartezian global geocentric. Este de asemenea
un sistem de coordonate tridimensional rectangular. Pozitia unui punct oarecare P de pe suprafata
Pmntului este definit att n sistem tridimensional elipsoidal ct si n coordonate elipsoidale
(latitudinea si longitudinea elipsoidal) (figura 3.2). Cele trei axe rectangulare sunt:
- Axa Z este ct mai aproape de axa polilor geografici;
- Axa X este n planul ecuatorului elipsoidal si intersecteaz meridianul 0 al elipsoidului
respectiv;
- Axa Y este perpendicular pe celelalte dou, situat n planul ecuatorului elipsoidului, cu
sensul pozitiv spre est.
Coordonatele elipsoidale, analog coordonatelor astronomice sunt:
- latitudinea geodezic, notat B;
- longitudinea geodezic, notat L.
Pentru a defini pozitia punctului nu pe elipsoid ci pe suprafata terenului, acestor dou
coorodonate li se adaug altitudinea elipsoidal, notat H
E
.
Latitudinea geodezic, B, a punctului P este unghiul format de normala la elipsoid n punctul P
cu planul ecuatorului elipsoidului de referint. Longitudinea geodezic, L, este unghiul diedru format de
meridianul geodezic al punctului P cu meridianul geodezic al punctului Greenwich. Altitudinea
elipsoidal, H
E
, este diferenta pe vertical, msurat pe normala la elipsoid a punctului P, dintre punctul
P de pe suprafata terenului si punctul n care normala le elipsoid a punctului P nteap elipsoidul.
De remarcat c meridianul 0
0
al elipsoidului nu corespunde cu meridianul 0
0
al geoidului. De
asemenea, n mod normal, fiecare elipsoid are alt origine pentru meridianul 0
0
si alt pozitie a
ecuatorului. De exemplu, ntre elipsoidul Krasovski si elipsoidul WGS84 este o diferent de circa 1 pe
longitudine si circa 6 pe latitudine la nivelul trii noastre.
3.2.3. Sistemul elipsoidal local.
Asa cum am definit sistemul astronomic local, tot astfel este definit si sistemul elipsoidal local
(Figura 3.2).
Sistemul de coordonate, elipsoidal local, are axele definite astfel:
- planul orizontal x
e
y
ae
este perpendicular pe normala la elipsoid;
- axa x
e
este situat n meridianul geodezic al punctului P (originea sistemului), deci cu sensul
pozitiv spre nordul geodezic;
- axa y
e
are sensul pozitiv spre estul geodezic si este perpendicular att pe axa x
e
ct si pe
normala la elipsoid;
- altitudinea, H
E
, definit si mai sus, este ndreptat dup normala la elipsoid, cu sensul pozitiv
ctre zenitul geodezic.
Coordonatelor astronomice polare le corespund coordonatele elipsoidale polare locale:
- D - distanta nclinat dintre cele dou puncte;
- A - azimutul astronomic al punctului de statie n raport de punctul nou, R;
-
E
- unghiul zenital, format ntre normala la elipsoid a punctului P si directia PR;
Coordonatele elipsoidale polare locale care definesc pozitia punctului nou R n sistemul
elipsoidal local pot fi transformate n coordonate elipsoidale locale, respectiv x
e
y
e
H
E
, pentru punctul R.
0
0
0
0
a
a
a
a
cos
sin sin
sin cos
D
Z
Y
X
X
,
, o
, o
= = (3.32)
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.53
3.3 Sisteme de coorodonate plane
3.3.1 Sistemul de coordonate Stereografic 1970
Proiectia stereografic 1970 este proiectia oficial folosit n prezent n Romnia.
3.3.1.1. Definitie si caracteristici principale. Proiectia azimutal perspectiv plan secant are
polul proiectiei n punctul Q
o
de coordonate B
o
= 46 si L
o
= 25 est Greenwich. Proiectia a fost
adoptat ncepnd cu luna septembrie 1971 cnd a fost emis decretul nr. 305 cu privire la activitatea
geodezic, topo-fotogrammetric si cartografic. A fost preluat, ca suprafat de referint, elipsoidul
Krasovski. Avantajul aceste proiectii este reprezentarea ntregii tri pe un singur plan. Cercul de
deformatie nul are raza de 201.718 msi reprezint intersectia planului secant cu elipsoidul de rolatie.
Originea sistemului de axe de coordonate rectangulare este n punctul Q
o
, axa x fiind ndreptat ctre
nord, iar axa y ctre est.
3.3.1.2. Formulele de transformare a coordonatelor B, L n x, y si respectiv x, y n B, L se
bazeaz pe formule cu coeficienti constanti (Flie & Strutu, 1957, Calistru & Munteanu, 1975 s. a.).
Formulele cu coeficienti constanti sunt exprimate n functie de diferenta de latitudine ABsi de
diferenta longitudine AL dintre punctul care se transcalculeaz (de coordonate B, L) si polul proiectiei
Q
o
. S-au folosit metodele propuse de Vladimir Hristov n anul 1937 care constau n dezvoltarea n
serie Taylor, n jurul punctului central Q
o
, a tuturor elementelor care depind de latitudine (latitudinea
izometric q, raza paralelului r, etc.). Coeficientii constanti sunt derivatele calculate n punctul central.
Operatiunile de transcalcul ncep prin calcule pregtitoare:
a. Transformarea coordonatelor geodezice B, L n coordonate rectangulare x, y.
0 0
L L L B B B = A = A (3.33)
4 4
10 10
' ' A = ' A ' ' A = ' A L L B B (3.34)
- ntr-o prima etap se calculeaz coordonatele x
/
si y
/
n plan tangent la elipsoid:
5
15
5
05
3 3
33
3 2
23
3
13
3
03
5
51
4
41
3
31
2
21 11 01
6
06
2 4
42
2 3
32
2 2
22
2
12
2
02
6
60
5
50
4
40
3
30
2
20 10 00
L B b L b
L B b L B b L B b L b
L B b L B b L B b L B b L B b L b y
L a
L B a L B a L B a L B a L a
B a B a B a B a B a B a a x
' A ' A + ' A +
+ ' A ' A + ' A ' A + ' A ' A + ' A +
+ ' A ' A + ' A ' A + ' A ' A + ' A ' A + ' A ' A + ' A = '
' A +
+ ' A ' A + ' A ' A + ' A ' A + ' A ' A + ' A +
+ ' A + ' A + ' A + ' A + ' A + ' A + = '
(3.35)
Valorile coeficientilor constanti sunt:
a
oo
= 0,0000000 a
o2
= 3752,1457111 a
o4
= 0,3359127 a
o6
= -0,0000575
a
1o
= 308758,9579813 a
12
= -99,9280966 a
14
= -0,0622287
a
2o
= 75,3584967 a
22
= -6,6748691 a
24
= 0,0002261
a
3o
= 60,2162733 a
32
= -0,0713046
a
4o
= -0,0148571 a
42
= -0,0025911
a
5o
= 0,0142609
a
6o
= -0,0215834
b
o1
= 215179,4208377 b
o3
= -23,2138674 b
o5
= -0,0086455
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.54
b
11
= -10767,8386289 b
13
= -1,9281015 b
15
= 0,0004969
b
21
= -128,6600287 b
23
= 0,1316098
b
31
= -2,1060912 b
33
= 0,0023711
b
41
= -0,0495324
b
51
= 0,0004263
- n urmtoarea etap se determin coordonatele n planul secant:
c y y c x x ' = ' = (3.36)
n care: c = 0,999750000.
Pentru determinarea coordonatelor finale fat de originea Q
0
, se adaug valorile 500.000 pe x si
pe y.
b. Transformarea coordonatelor rectangulare x, y n coordonate geodezice B, L.
Si pentru aceast transformare sunt necesare urmtoarele calcule pregtitoare:
- Trecerea coordonatelor plane rectangulare x, y din planul secant n planul tangent;
c y y c x x ' = ' ' = ' (3.37)
n care: c
/
= 1,000250063.
- Pentru omogenizarea ecuatiilor coordonatele rectangulare x
/
si y
/
se multiplic n prealabil cu
factorul 10
-5
.
Transformarea coordonatelor rectangulare x, y din plan tangent n coordonate geodezice B, L se
realizeaz cu relatiile:
5
15
5
05
3 3
33
3 2
23
3
13
3
03
5
51
4
41
3
31
2
21 11 01
6
06
4 2
24
4
14
4
04
2 4
42
2 3
32
2 2
22
2
12
2
02
5
50
4
40
3
30
2
20 10 00
y x b y b
y x b y x b y x b y b
y x b y x b y x b y x b y x b y b L
y a
y x a y x a y a
y x a y x a y x a y x a y a
x a x a x a x a x a a B
' ' ' + ' ' +
+ ' ' ' + ' ' ' + ' ' ' + ' ' +
+ ' ' ' + ' ' ' + ' ' ' + ' ' ' + ' ' ' + ' ' = ' ' A
' ' +
+ ' ' ' + ' ' ' + ' ' +
+ ' ' ' + ' ' ' + ' ' ' + ' ' ' + ' ' +
+ ' ' + ' ' + ' ' + ' ' + ' ' + ' = ' ' A
(3.38)
a'
oo
= 0,0000000 a'
o2
= -26,2457302 a'
o4
= 0,0033123 a'
o6
= -0,0000002
a'
1o
= 3238,7724276 a'
12
= -0,6202059 a'
14
= 0,0001735
a'
2o
= -0,2560279 a'
22
= -0,0099813 a'
24
= 0,0000055
a'
3o
= -0,0662169 a'
32
= -0,0001893
a'
4o
= 0,0000313 a'
42
= -0,0000031
a'
5o
= 0,0000024
b'
o1
= 4647,2845596 b'
o3
= -0,5020804 b'
o5
= 0,0001125
b'
11
= 75,3195104 b'
13
= -0,0289995 b'
15
= 0,0000109
b'
21
= 1,5062413 b'
23
= -0,0011247
b'
31
= 0,0289995 b'
33
= -0,0000363
b'
41
= 0,0005624
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.55
b'
51
= 0,0000109
3.3.1.3. Deformatiile n proiectia stereografic 1970. Deformatia liniar, descris n (cap. 5,
vol 1) are aceeasi valoare pe vertical si almucantarat:
2
cos
1
2
z
= (3.39)
n proiectia stereografic 1970 deformatiile liniare n interiorul cercului de secant sunt negative,
ajungnd pn la -25 cm n polul Q
o
al proiectiei. Pe linia cercului de secant deformatiile liniare sunt
nule, iar n afara cercului de secant deformatiile liniare sunt pozitive.
Rezult pentru deformatia unghiular (vol 1, cap. 5, 5.3.3):
0
2
sin =
+
=
b a
b a t
(3.40)
adic proiectia stereografic 1970 este conform. Modulul de deformatie a suprafetelor (vol 1, cap. 5,
5.3.2), este:
2
cos
1
4
2
z
p = = (3.41)
3.3.2 Sistemul de coordonate Gauss Kruger
Proiectia Gauss-Krger. Aceast proiectie a fost introdus n tara noastr n anul 1951. Din
anul 1971, n lucrrile civile, proiectia Gauss-Krger a fost nlocuit cu proiectia stereografic 1970.
Specialistii militari folosesc n continuare proiectia Gauss-Krger.
3.3.2.1. Definitie si caracteristici principale. Proiectia Gauss-Krger este o proiectie cilindric
transversal, conform si are ca suprafat de referint elipsoidul Krasovski. Specific proiectiei este
reprezentarea elipsoidului pe fuse, adic pe portiuni delimitate de meridiane situate la latitudini diferite,
n functie de scopul urmrit. Astfel, fusele pot fi de 6 sau de 3 sau mai mici (pentru reprezentri la
scri mari). Orice fus, indiferent de mrime, are un meridian axial, a crui longitudine B
o
este precizat
n raport de meridianul origine. Conform unei ntelegeri internationale, aceeptat si de tara noastr,
numerotarea fuselor de 6 se face cu cifre arabe, de la 1 la 60, spre est, de la meridianul de 180, care
separ fusele numrul 1 (cuprins ntre 174 si 180 longitudine vestic) si numrul 60 (cuprins ntre
174 si 180 longitudine estic). Tara noastr se reprezint n fusele de 6 cu numrul 34 (B
o
= 21 est
Greenwich) si numrul 35 (B
o
= 27 est Greenwich).
Meridianul axial al fusului se reprezint n plan printr-o linie dreapt, care se ia ca ax O|0
(sensul pozitiv spre nord) a sistemului de coordonate plane pentru fusul respectiv. Axa Oy este
perpendicular pe axa Ox si cu sensul pozitiv spre est.
3.3.2.2. Formulele de transformare a coordonatelor B, L n x, y si respectiv x, y n B, L se
bazeaz pe formule cu coeficienti constanti (Flie & Strutu, 1957, Calistru & Munteanu, 1975 s. a.),
principiile de deducere a acestora fiind similare cu cele descrise n (vol 1, cap. 5, 5.5.1.5.).
a. Transformarea coordonatelor geodezice B, L n coordonate rectangulare x, y.
Si n aceast transformare sunt necesare unele calcule pregtitoare:
0 0
L L L B B B = A = A (3.42)
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.56
n care B
o
= 46, iar L
o
= longitudinea meridianului axial al fusului respectiv.
4 4
10 10
' ' A = ' A ' ' A = ' A L L B B (3.43)
- ntr-o prima etap se calculeaz coordonata Ax si coordonata y raportate la fusul respectiv:
5 2
25
5
15
5
05
3 4
43
3 3
33
3 2
23
3
13
3
03
4
41
3
31
2
21 11 01
4 3
34
4 2
24
4
14
4
04
2 4
42
2 3
32
2 2
22
2
12
2
02
4
40
3
30
2
20 10 00
L B b L B b L b
L B b L B b L B b L B b L b
L B b L B b L B b L B b L b y
L B a L B a L B a L a
L B a L B a L B a L B a L a
B a B a B a B a a x
' A ' A + ' A ' A + ' A +
+ ' A ' A + ' A ' A + ' A ' A + ' A ' A + ' A +
+ ' A ' A + ' A ' A + ' A ' A + ' A ' A + ' A =
' A ' A + ' A ' A + ' A ' A + ' A +
+ ' A ' A + ' A ' A + ' A ' A + ' A ' A + ' A +
+ ' A + ' A + ' A + ' A + =
(3.44)
Valorile coeficientilor constanti sunt urmtoarele:
a
oo
= 0,0000000 a
o2
= 3752,14570 a
o4
= 1,40331
a
1o
= 308758,95802 a
12
= -12,09428 a
14
= -0,22026
a
2o
= 75,36064 a
22
= -17,64146 a
24
= -0,00525
a
3o
= -0,06459 a
32
= 0,01607 a
34
= 0,00135
a
4o
= -0,05909 a
42
= 0,01396
b
o1
= 215179,42083 b
o3
= -2,80957 b
o5
= -0,03070
b
11
= -10767,83826 b
13
= -8,05441 b
15
= -0,00004
b
21
= -254,69196 b
23
= 0,42862 b
25
= 0,00069
b
31
= 4,13843 b
33
= 0,02170
b
41
= 0,05360 b
43
= -0,00083
Coordonata final x rezult din: x = Ax + x
o
, n care x
o
= 5096175,747 m.
b. Transformarea coordonatelor rectangulare x, y n coordonate geodezice B, L.
Initial se calculeaz diferenta Ax = x - x
o
n care x
o
a fost definit anterior.
Pentru omogenizarea calculelor de transformare, coordonatele rectangulare Ax si y se multiplic
cu factorul 10
-5
.
5 3
35
5 2
25
5
15
5
05
3 5
53
3 4
43
3 3
33
3 2
23
3
13
3
03
5
51
4
41
3
31
2
21 11 01
4 3
34
4 2
24
4
14
4
04
2 5
52
2 4
42
2 3
32
2 2
22
2
12
2
02
5
50
4
40
3
30
2
20 10 00
y x b y x b xy b y b
y x b y x b y x b y x b xy b y b
y x b y x b y x b y x b xy b y b L
y x a y x a xy a y a
y x a y x a y x a y x a xy a y a
x a x a x a x a x a a B
' + ' + ' + ' +
+ ' + ' + ' + ' + ' + ' +
+ ' + ' + ' + ' + ' + ' = ' ' A
' + ' + ' + ' +
+ ' + ' + ' + ' + ' + ' +
+ ' + ' + ' + ' + ' + ' = ' ' A
(3.45)
Coeficientii constanti de mai sus au valorile:
a'
oo
= 0,0000000 a'
o2
= -26,2457302 a'
o4
= 0,0043872
a'
1o
= 3238,7724270 a'
12
= -0,8191913 a'
14
= 0,0002442
a'
2o
= -0,2560280 a'
22
= -0,0131746 a'
24
= 0,0000090
a'
3o
= -0,0001115 a'
32
= -0,0002819 a'
34
= 0,0000003
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.57
a'
4o
= 0,0000208 a'
42
= -0,0000057
a'
5o
= 0,0000000 a'
52
= -0,0000001
b'
o1
= 4647,2845610 b'
o3
= -0,59725451 b'
o5
= 0,00014563
b'
11
= 75,3195100 b'
13
= -0,03516938 b'
15
= 0,00001478
b'
21
= 1,7917640 b'
23
= -0,00145632 b'
25
= 0,00000090
b'
31
= 0,0351694 b'
33
= -0,00004925 b'
35
= 0,00000004
b'
41
= 0,0007282 b'
43
= -0,00000151
b'
51
= 0,0000149 b'
53
= -0,00000004
b'
61
= 0,0000030
Pentru calculul coordonatelor B si L se folosesc formulele (3.42).
3.3.2.3. Deformatiile n proiectia Gauss-Krger.
Modulul de deformatie liniar (vol 1, cap. 5, 5.3.1) are forma:
4
4
2
2
24 2
1
R
y
R
y '
+
'
+ = (3.46)
n care y
/
este deprtarea punctului considerat fat de meridianul axial.
Se observ c deformatia liniar creste cu ptratul deprtrii fat de meridianul axial si este nul
pe acesta.
Deformatia unghiular (vol 1, cap. 5, 5.3.3) este nul deoarece semiaxele elipsei deformatiilor
sunt egale.
Modulul de deformatie a suprafetelor (vol 1, cap. 5, 5.3.2):
p =
5.
3.3.3 Sistemul de coordonate UTM
Proiectia UNIVERSAL TRANSVERSAL MERCATOR (UTM)
Proiectia MERCATOR este o proiectie cilindric si are mai multe variante, n functie de pozitia
cilindrului. Cand cilindrul este tangent la ecuatorul elipsoidului, proiectia este normal sau direct.
Cnd cilindrul este tangent la un meridian dat, proiectia este transversal. Proiectia MERCATOR a fost
definit n anul 1569 de catre matematicianul olandez GERHARD KREMER cunoscut si sub
pseudonimul MERCATOR (1512-1594). Varianta normal a fost folosit initial de MERCATOR si
descris apoi de WRIGHT (1599). Varianta transversal a fost descris de LAMBERT in anul 1772,
dezvoltat de GAUSS intre anii 1825-1830 si adaptat pentru cartografie de KRUGER n anul 1912.
Datorita acestui fapt, varianta transversal poart si numele de proiectie conform GAUSS-KRUGER.
n anul 1950 s-a nceput elaborarea unui sistem de referint universal, pentru ntreaga suprafat terestr,
introdus pentru hrtile topografice utilizate de trile membre NATO denumit UTM (Universal
Transversal Mercator). Prin sistemul de proiectie UTM se poate reprezenta aproape ntreaga suprafat a
globului terestru cu exceptia zonelor polare.
Sistemul UTM acoper suprafata cuprins ntre paralela de 80
o
latitudine sudica si paralela de
84
o
latitudine nordica. Datorita acestui fapt fusele terestre cu latime de 6
o
in longitudine (definite la fel
ca si in proiectia GAUSS-KRUGER) cuprinse intre aceste paralele poarta denumirea de zone. Peste
limita de 84
o
latitudine nordica pana la pol, respectiv peste limita de 80
o
latitudine sudica pana la pol se
aplica un alt sistem de proiectie denumit UPS (Universal Polar Stereografic).
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.58
Sistemul UTM este deosebit de alte proiectii cilindrice prin faptul ca parametrii proiectiei UTM
au fost calculati pentru mai multi elipsoizi de referinta diferiti, in scopul de a ajunge la o unificare
mondiala, astfel: CLARKE 1886 (America de Nord), CLARKE 1880 (Africa), BESSEL 1841 (fostele
tari sovietice, Japonia si partea de sud-est a Asiei), EVEREST 1830 (India si partile alaturate ale sud-
estului Asiei) si HAYFORD 1909 (celelalte parti ale lumii). In urma progreselor facute in geodezia
spatiala, in anul 1984 s-a introdus proiectia UTM pe elipsoidul asociat sistemului WORLD GEODETIC
SYSTEM 1984, determinat cu ajutorul satelitilor artificiali ai Pamantului. Elipsoidul de rotatie ales
astfel este WGS84, folosit pentru utilizarea in scopuri militare si civile a sistemului de pozitionare cu
sateliti GPS (GLOBAL POSITIONING SYSTEM).
Parametrii care definesc un elipsoid (pentru urmatoarele definitii se vor considera toate
lungimile exprimate in metri si toate coordonatele geografice in radiani, daca nu este specificat altceva)
sunt stabiliti dupa cum urmeaza:
(pentru emisfera Sudica si Vestica se foloseste notatia negativa)
- a = semiaxa mare a elipsoidului
- b = semiaxa mica a elipsoidului
- f = turtirea =
a
b a
- e
2
= (prima excentricitate)
2
=
2
2 2
a
b a
= f (2-f)
- e
2
= (a doua excentricitate)
2
=
2
2 2
b
b a
=
2
2
1 e
e
=
2
) 1 (
) 2 (
f
f f
- n =
b a
b a
+
=
f
f
2
- = raza de curbura a meridianului =
2 / 3 2 2
2
) sin 1 (
) 1 (
| e
e a
- u = raza de curbura in primul vertical =
2 / 1 2 2
) sin 1 ( | e
a
= (1+e
2
cos
2
| )
- S = arcul de meridian = A| - Bsin2| +Csin4| -Dsin6| +Esin8|
unde:
- ...] ) (
64
81
) (
4
5
1 [
5 4 3 2
+ + + = ' n n n n n a A
- ...]
64
55
) (
8
7
[
2
3
5 4 3 2
+ + + = ' n n n n n a B
- ...] ) (
4
3
[
16
15
5 4 3 2
+ + = ' n n n n a C
- ...]
16
11
[
48
35
5 4 3
+ + = ' n n n a D
- ...] [
512
315
5 4
+ = ' n n a E (E ~ 0.03mm)
Parametrii proiectiei UTM sunt definiti dupa cum urmeaza:
- | = latitudinea
- i = longitudinea
- | = latitudinea piciorului perpendicularei duse din punct pe meridianul central
- i
o
= longitudinea originii proiectiei (meridianul central)
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.59
- i i i = A
o
= diferenta longitudinii fata de meridianul central
- k
o
= factorul de scara central care reprezinta o reducere arbitrara aplicata tuturor lungimilor
geodezice pentru a reduce deformarea maxima de scara a proiectiei = 0.9996
- k = factorul de scara in punctul de lucru pe proiectie
- FN = Fals Nord (0m pentru emisfera Nordica si 10000000m pentru emisfera Sudica)
- FE = Fals Est (500000m)
- AE = E FE
- E = valoarea coordonatei rectangulare Est
- N = valoarea coordonatei rectangulare Nord
- C = convergenta meridianelor
Termenii utilizati in calculul ecuatiilor generale ale proiectiei UTM sunt:
- T
1
= Sk
o
- T
2
=
2
cos sin
o
k | | u
- T
3
= ) cos ' 4 cos ' 9 tan 5 (
24
cos sin
4 4 2 2 2
3
| | |
| | u
e e
k
o
+ +
- T
4
=
) cos ' tan 192 cos ' tan 600 cos ' 88 cos ' tan 680 cos ' 324
cos ' 445 cos ' tan 330 cos ' 270 tan tan 58 61 (
720
cos sin
8 8 2 6 6 2 8 8 4 4 2 6 6
4 4 2 2 2 2 2 4 2
5
| | | | | | | |
| | | | | |
| | u
e e e e e
e e e
k
o
+ +
+ + +
- T
5
= ) tan tan 543 tan 3111 1385 (
40320
cos sin
6 4 2
7
| | |
| | u
+
o
k
- T
6
=
o
k | u cos
- T
7
= ) cos ' tan 1 (
6
cos
2 2 2
3
| |
| u
e
k
o
+
- T
8
=
) cos ' tan 24 cos ' tan 64
cos ' 4 cos ' 13 cos ' tan 58 cos ' 14 tan tan 18 5 (
120
cos
6 6 2 4 4 2
6 6 4 4 2 2 2 2 2 4 2
5
| | | |
| | | | | | |
| u
e e
e e e e
k
o
+ + + +
- T
9
= ) tan tan 179 tan 479 61 (
5040
cos
6 4 2
7
| | |
| u
+
o
k
- T
10
=
2
2
' tan
o
k u
|
- T
11
= ) ' cos ' ' tan 9 ' cos ' 4 ' cos ' ' tan 3 5 (
24
' tan
2 2 2 4 4 2 2 2
4 3
| | | | |
u
|
e e e
k
o
+ +
- T
12
=
) ' cos ' ' tan 192 ' cos ' ' tan 84
' cos ' ' tan 225 ' cos ' 88 ' cos ' ' tan 90 ' cos ' ' tan 66 ' cos ' 100
' cos ' 3 ' cos ' ' tan 252 ' tan 45 ' cos ' 46 ' tan 90 61 (
720
' tan
8 8 2 6 6 2
4 4 4 8 8 2 2 4 4 4 2 6 6
4 4 2 2 2 4 2 2 2
6 5
| | | |
| | | | | | | |
| | | | | |
u
|
e e
e e e e e
e e e
k
o
+
+ + +
+ + +
- T
13
= ) ' tan 1575 ' tan 4095 ' tan 3633 1385 (
40320
' tan
6 4 2
8 7
| | |
u
|
+ + +
o
k
- T
14
=
o
k ' cos
1
| u
- T
15
= ) ' cos ' ' tan 2 1 (
' cos 6
1
2 2 2
3
0
3
| |
| u
e
k
+ +
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.60
- T
16
=
) ' cos ' ' tan 24 ' cos ' ' tan 4 ' cos ' 4
' tan 24 ' cos ' ' tan 8 ' cos ' 3 ' tan 28 ' cos ' 6 5 (
' cos 120
1
6 6 2 4 4 2 6 6
4 2 2 2 4 4 2 2 2
5 5
| | | | |
| | | | | |
| u
e e e
e e e
k
o
+ +
+ + + +
- T
17
= ) ' tan 720 ' tan 1320 ' tan 662 61 (
' cos 5040
1
6 4 2
7 7
| | |
| u
+ + +
- T
18
= sin|
- T
19
= ) cos ' 2 cos ' 3 1 (
3
cos sin
4 4 2 2
2
| |
| |
e e + +
- T
20
=
) cos ' tan 24 cos ' tan 60 cos ' 11 cos ' tan 50
cos ' 33 cos ' tan 15 cos ' 35 cos ' 15 tan 2 (
15
cos sin
8 8 2 6 6 2 8 8 4 4 2
6 6 2 2 2 4 4 2 2 2
4
| | | | | | |
| | | | | |
| |
e e e e
e e e e
+
+ + +
- T
21
= ) tan 2 tan 26 17 (
315
cos sin
4 2
6
| |
| |
+
- T
22
=
o
k u
|' tan
- T
23
= ) ' cos ' 2 ' cos ' ' tan 1 (
3
' tan
4 4 2 2 2
3 3
| | |
u
|
e e
k
o
+ `
- T
24
=
) ' cos ' ' tan 24 ' cos ' 11 ' cos ' ' tan 27 ' cos ' ' tan 7
' cos ' 20 ' cos ' 9 ' cos ' ' tan ' tan 3 ' cos ' 2 ' tan 5 2 (
15
' tan
8 8 2 8 8 6 6 2 4 4 2
6 6 4 4 2 2 2 4 2 2 2
5 5
| | | | | | |
| | | | | | |
u
|
e e e e
e e e e
k
o
+
+ + + + + +
- T
25
= ) ' tan 45 ' tan 105 ' tan 77 17 (
315
' tan
6 4 2
7 7
| | |
u
|
+ +
o
k
- T
26
= ) cos ' 1 (
2
cos
2 2
2
|
|
e +
-
) cos ' tan 24 cos ' tan 48 cos ' 4
cos ' tan 28 cos ' 13 cos ' 14 tan 4 5 (
24
cos
T
6 6 2 4 4 2 6 6
2 2 2 4 4 2 2 2
4
27
| | | | |
| | | | |
|
e e e
e e e
+
+ + + =
- T
28
= ) tan 16 tan 148 61 (
720
cos
4 2
6
| |
|
+
- T
29
= ) ' cos ' 1 (
2
1
2 2
2 2
|
u
e
k
o
+
-
) e e
e' e' e
k
o
6 6 2 4 4 2
6 6 4 4 2 2
4 4 30
cos tan 24 cos tan 24
cos 4 cos 9 cos ' 6 1 (
24
1
T
+ + + =
u
- T
31
=
6 6
720
1
o
k u
Calculele, utilizand termenii de mai sus, asigura o precizie de
aproximativ 0.001 secunde de arc pentru coordonatele geografice si de
0.01m pentru coordonatele rectangulare.
Transformarea coordonatelor geografice in coordonate
rectangulare:
Fig. 3.4
Proiecia UTM
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.61
, )
, )
9
7
8
5
7
3
6
5
8
4
6
3
4
2
2
1
T T T T FE E
T T T T T FN N
i i i i
i i i i
A + A + A + A + =
A + A + A + A + + =
Transformarea coordonatelor rectangulare in coordonate geografice:
17
7
16
5
15
3
14 0
13
8
12
6
11
4
10
2
T E T E T E ET
T E T E T E T E
A + A A + A + =
A + A A + A ' =
i i
| |
Latitudinea ' | se obtine prin iteratii succesive bazate pe termenul T1.
Convergenta meridianelor (din coordonate geografice):
21
7
20
5
19
3
18
T T T T C i i i i A + A + A + A =
Convergenta meridianelor (din coordonate rectangulare):
25
7
24
5
23
3
22
T E T E T E ET C A A + A A =
Factorul de scara (din coordonate geografice):
, )
28
6
27
4
26
2
0
1 T T T k k i i i A + A + A + =
Factorul de scara (din coordonate rectangulare):
, )
31
6
30
4
29
2
0
1 T E T E T E k k A + A + A + =
Proiectia UTM prezint avantajul reducerii deformatiilor liniare prin introducerea unui factor de
scara subunitar de-a lungul meridianului axial (central) al fusului (zonei). In proiectia GAUSS-
KRUGER deformatiile liniare de-a lungul meridianului axial (central) al fusului sunt nule (modulul de
deformatie liniar este egal cu 1), acestea crescand pe masura ce ne indepartam de meridianul axial,
ajungand la o valoare maxima in apropierea meridianelor din marginile fusului (la latitudinea medie a
Romaniei deformatiile ajung la aproximativ 75-77 cm/km). In proiectia UTM aceste deformatii
maxime, in vecinatatea meridianelor din marginile fusului, se injumatatesc prin introducerea factorului
de scara subunitar de-a lungul meridianului axial al fusului (zonei). Factorul de scara subunitar care
apare de-a lungul meridianelor axiale ale zonelor se datoreaza faptului ca, in acest caz, cilindrul nu mai
este tangent la meridianul axial (central) al zonei ca la proiectia GAUSS-KRUGER, ci secant.
Intersectia dintre suprafata terestra si suprafata cilindrului se face dupa doua meridiane numite
meridiane de secanta. Proiectia UTM face parte din grupa proiectiilor cilindrice transversale conforme,
care dau o reprezentare a elipsoidului de referinta direct pe planul cilindrului. Reprezentarea suprafetei
terestre se face pe zone de 6
o
diferenta de longitudine, proiectia UTM fiind o proiectie conforma, deci
unghiurile nu sunt deformate (modulul de deformatie unghiular este egal cu 1). Datorita faptului ca
deformatiile liniare sunt mici, iar deformarile unghiulare sunt nule, creste precizia reprezentarii
terenului pe o harta topografica executata in proiectia UTM. Zonele in proiectia UTM se numeroteaza
incepand de la meridianul de longitudine 180
o
(meridianul opus meridianului care trece prin punctul
Greenwich), cu cifre arabe de la 1 la 60, in sens antiorar.
Suprafata elipsoidului pe plan se proiecteaza astfel:
- reprezentarea este conforma (modulul de deformatie unghiulara este nul);
- reprezentarea meridianului axial (central) al unei zone este o dreapta fata de care proiectia
este simetrica;
- factorul de scara pe directia meridianului axial este k
o
= 0.9996, deci cilindrul care este
circumscris elipsoidului nu mai este tangent la meridianul axial, ca in cazul proiectiei
GAUSS-KRUGER, ci secant, dupa doua meridiane simetrice fata de meridianul axial,
numite meridiane de secanta;
- sistemul de coordonate este propriu fiecarui fus.
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.62
Intr-o zona de 6
o
exista linii de secanta (cu deformatii liniare nule) situate la aproximativ
180000m E si V fata de meridianul axial (central) al zonei respective.
Pentru evitarea coordonatelor negative, meridianului axial (central) i se atribuie o valoare falsa a
estului de 500000m, practic, meridianul axial al zonei de 6
o
este translatat spre stanga cu 500000m.
Astfel meridianele de secanta se afla la coordonata 320000m E si respectiv 680000m E.
Axele sistemului rectangular al unei zone de 6
o
in proiectia UTM sunt inversate fata de proiectia
GAUSS- KRUGER:
- axa Ox (abscisa) este pe orizontala si este data de proiectia ecuatorului in planul hartii
topografice.
- axa Oy (ordonata) este pe verticala si este data de proiectia meridianului central (axial) al
zonei respective.
In proiectia U.T.M. factorul de scara este 1.000 de-a lungul liniilor (meridianelor) de secanta,
descreste pana la 0.9996 de-a lungul meridianului axial si creste pana la 1.0010 in zonele meridianelor
de la marginile zonei.
Meridianele si paralele se reprezinta in proiectia UTM prin curbe oarecare, meridianele fiind
simetrice fata de meridianul axial al zonei care conform conditiei puse se reprezinta printr-o linie
dreapta.
Paralelele sunt simetrice fata de Ecuator, care se reprezinta printr-o linie dreapta.
Pozitia unui punct oarecare in planul proiectiei (in planul hartii) se determina intr-o retea de
coordonate rectangulare X, Y. Grila rectangulara se realizeaza ducand linii paralele la axele de
coordonate ale fiecarei zone.
Toate coordonatele X in proiectia UTM contin translatia de 500000m. Pentru a afla pozitia
exacta a unui punct oarecare fata de meridianul central al zonei respective, se va scadea 500000m din
valoarea coordonatei X.
In emisfera sudica apare particularitatea referitoare la coordonatele Y (ordonate) negative.
Pentru a evita coordonate negative in emisfera sudica se adopta ca Ecuatorul sa aiba ordonata de
10000000m (valabil numai pentru coordonatele din emisfera sudica). Aceasta valoare se justifica astfel:
de la Ecuator la Polul Sud sunt 90
o
latitudine, distanta de teren acoperita de 1
o
de latitudine este de cca.
111 km, deci: 90
o
x 111km ~ 9900000m ~ 10000000m
Coordonatele geografice sunt exprimate in masuri unghiulare, mai precis in grade sexazecimale
incepand cu valoarea de 0
o
la Ecuator, paralelele fiind numerotate pana la valoarea de 84
o
N si 80
o
S.
Deoarece latitudinea poate avea aceeasi valoare numerica la N sau la S de Ecuator, se va indica
intotdeauna directia N sau S.
Longitudinea se masoara atat spre Est cat si spre Vest incepand de la meridianul de origine
(meridianul ce trece prin punctul Greenwich). Meridianele la Est de meridianul origine merg pana la
valoarea de 180
o
si sunt dentificate ca longitudine estica. Similar se procedeaza si cu longitudinile
vestice.
Romania se afla pe fusele 34 si 35, marginea de jonctiune dintre cele doua zone este meridianul
de longitudine de 24
o
, situat aproximativ la jumatatea Romaniei.
Existenta mai multor zone in proiectia UTM (ca si in cazul proiectiei GAUSS-KRUGER)
impune posibilitatea transformarii coordonatelor dintr-un fus in celalalt. Aceasta operatiune este ceruta
in cazul unor lucrari care se executa pe suprafete a doua zone invecinate (adiacente).
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.63
Fig. 3.5. Nomenclatura foilor de hart n proiectia UTM
Nomenclatura reprezinta un sistem de pozitionare a foilor pe harta pe suprafata globului terestru
si totodata o metoda de identificare unica a acestora.
Nomenclatura foilor de harta in proiectia UTM este diferita de aceea pentru foile de harta in
proiectia GAUSS-KRUGER.
In proiectia GAUSS-KRUGER, ca scara de baza se utilizeaza 1:25000, iar in proiectia UTM
sunt utilizate doua scari de baza si anume: 1:50000 si 1:250000.
Nomenclatura unei foi de harta la scara 1:250000 este formata din doua grupuri de caractere
alfanumerice despartite prin linioara astfel:
- -primul grup este alcatuit din doua litere si doua cifre cu urmatoarea semnificatie:
- prima litera reprezinta emisfera nordica (N) sau emisfera sudica (S);
- a doua litera reprezinta intervalul de 4
o
pe latitudine in care se afla foaia.
Numerotarea incepe cu litera A de la Ecuator spre N si S. Ordinea literelor este cea din alfabetul
latin (de la A la V).
- grupul de doua cifre reprezinta numarul zonei (fusului in proiectia GAUSS-KRUGER). Dupa
cum stim, Romania se afla pe zonele (fusele) 34 si 35.
- al doilea grup de caractere este format dintr-un numar ce reprezinta pozitia foii intr-un cadru
de 4
o
pe latitudine si 6
o
pe longitudine.
Exemplu: NL 34-06 se citeste astfel:
- N = emisfera nordica;
- L = intervalul cuprins intre paralelele de 44
o
si 48
o
latitudine;
- 34 = zona 34 (a patra de la Greenwich spre est) care
- este cuprinsa intre meridianele de 18
o
si 24
o
longitudine;
- 06 = a sasea foaie de harta din zona de 4
o
latitudine si 6
o
longitudine;
Ca si in proiectia GAUSS-KRUGER, harta la scara 1:1.000.000 a fost luata ca baza pentru
hartile la scara 1:250.000. Deci, pentru obtinerea unei foi de harta la scara 1:250.000 s-a impartit foaia
de harta la scara 1:1.000.000 in 16 foi de harta la scara 1:250.000 daca suprafata reprezentata este
cuprinsa intre ecuator si paralela de 40
o
latitudine nordica respectiv intre ecuator si paralela de 40
o
latitudine sudica. Dimensiunea unei astfel de foi de harta la scara 1:250.000 este de 1
o
pe latitudine si
1
o
30 pe longitudine.
Foaia de harta la scara 1:1.000.000 se imparte in 12 foi de harta la scara 1:250.000 daca
suprafata reprezentata este cuprinsa intre paralela de 40
o
latitudine nordica si paralela de 84
o
latitudine
nordica respectiv intre paralela de 40
o
latitudine sudica si paralela de 80
o
latitudine sudica. Dimensiunea
unei astfel de foi de harta la scara de 1:250.000 este de 1
o
pe latitudine respectiv de 2
o
pe longitudine.
Nomenclatura unei foi de harta la scara 1:250.000 se compune deci din nomenclatura foii de
harta la scara 1:1000000 si numarul foii de harta rezultat din impartire.
Nomenclatura foii de harta la scara 1:50.000 are ca baza tot harta la scara 1:1.000.000, dar
denumirile pornesc de la zonele si subzonele delimitate de interesul NATO.
Dimensiunea unei foi de harta la scara 1:50.000 in zona Romniei este de 15 pe latitudine si 18
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.64
pe longitudine. (In proiectia GAUSS-KRUGER, foile de harta la scara 1:50.000 au dimensiunile de 10
pe latitudine si 15 pe longitudine).
Suprafata reprezentata la scara 1:50.000 in proiectia UTM este mai mare astfel decat suprafata
reprezentata la aceasta scara in proiectia GAUSS-KRUGER.
Foaia de harta la scara de 1:100.000, avand dimensiunile de 30 pe latitudine si 36 pe
longitudine, se obtine prin impartirea unei foi de harta la scara 1:1.000.000 in 80 de planse.
Dimensiunile cadrului foii de harta la scara 1:50.000 rezulta din impartirea foii de harta la scara
1:100.000 in patru.
Retelele rectangulare militare constau din linii paralele ce se intersecteaza sub unghiuri drepte si
care formeaza o retea rectangulara. Liniile N S se numesc norduri, iar liniile E V se numesc esturi.
Intervalul dintre doua linii succesive ale unui astfel de caroiaj rectangular este functie de scara
hartii topografice militare respective.
Scara Intervalul retelei rectangulare
1: 25 000 1 km
1: 50 000 1 km
1: 100 000 1 km sau 10 km
1: 250 000 10 km
1: 500 000 10 km
1: 1 000 000 10 km
Pentru zonele terestre cuprinse intre latitudinile de 84
o
N si 80
o
S se utilizeaza reteaua
rectangulara UTM, deci si pentru Romnia.
Caroiajul rectangular militar de referinta (MGRS) a fost proiectat pentru a fi utilizat impreuna cu
caroiajul rectangular UTM.
MGRS reprezinta versiunea alfa numerica a coordonatelor rectangulare numerice UTM.
Globul terestru a fost divizat in 60 de zone (fuse) de 6
o
longitudine si fasii latitudinale de 8
o
(20
de astfel de fasii latitudinale, incepand de la paralela de 80
o
S si pana la paralela de 84
o
N).
Fasiile latitudinale se noteaza cu literele alfabetului latin, majuscule incepand cu litera C si
terminand cu litera X, exceptand literele I si O (fasia X are 12
o
).
Zonele de 6
o
se numeroteaza de la 1 la 60 incepand de la antemeridian in sens antiorar.
Deci, o regiune oarecare de pe glob este localizata in sistemul MGRS prin identificarea zonei
terestre (zona de 6
o
si fasia latitudinala de 8
o
).
Aceasta identificare este unica si se numeste denumirea zonei retelei.
Romania se intinde in zonele UTM 34 si 35 si in banda de latitudine T.
3.3.4 Sisteme de coordonate locale
n capitolele 3.1.2 si 3.2.3 au fost discutate Sistemul astronomic local si sistemul elipsoidal
local. De aici se poate deduce c orice punct de pe suprafata terestr poate deveni originea unui sistem
de coordonate local.
Sistemele de coordonate locale sunt create pentru lucrri de mic anvergur sau pentru lucrri
ingineresti. Astfel, se alege un plan de proiectie si un sistem de axe de coordonate care s satisfac
nevoile locale. n multe cazuri sistemul de coordonate este legat la sistemul Stereografic 1970 printr-un
punct origine care are coordonatele n sistem stereografic 1970. Se alege o orientare ctre un punct al
retelei, iar distanta redus la planul de proiectie este aceeasi cu distanta redus la orizont. n acest mod
se face o legtur cu proiectia national. Este totusi periculoas aceast practic, deoarece toate celelalte
puncte ale retelei locale (n afara punctului origine care are coorodnate identice n sistem stereografic si
local) vor avea coordonate n sistem local, dar foarte apropiate de valorile absolute n sistem
Stereografic 1970. n acest mod se pot crea confuzii cnd se calculeaz coordonatele punctelor de
CURS GEODEZIE SATELITARA
Capitolul 3. Sisteme de coordonate utilizate in tehnologia GPS pag.65
ndesire. Astfel de cazuri concrete sunt la Arad si Craiova. La Arad, datorit deformatiilor foarte mari n
sistemul Streografic 1970, reteaua local a municipiului a fost proiectat pe un plan local. Punctul de
plecare al retelei locale are aceleasi coordonate n ambele sisteme. Celelalte puncte ale retelei locale au
coordonate n sistem local, dar foarte apropiate de valorile lor n sistemul national. Valorile absolute
ncep s difere semnificativ n cele dou sisteme de coordonate spre marginea localittii (diferente de
circa 2 metri pe x si 2 metri pe y). Este foarte periculos, deoarece pentru utilizatorii obisnuiti aceste
diferente nu sunt bine ntelese si se creaz confuzii.
Exist utilizatori care nu pot face legarea la reteaua national si n acest caz, pentru fiecare
parcel, creaz un sistem de coordonate local. Astfel, aleg o origine a sistemului cu coordonate
1000/1000 sau 10000/10000, functie de ntinderea lucrrii, aleg un nord luat de obicei cu busola sau de
pe plan si dezvolt lucrrile de detaliu. Este la fel de periculos acest procedeu deoarece lucrrile nu pot
fi pozitionate nicieri si nu pot fi ncrcate n bncile de date. Sigur, ca element de legtur pentru
sistemele acestea putem lua colturile de proprietate, dar n Romnia fiecare proprietar are coltul lui care
nu prea bate cu al vecinului si astfel legtura se rupe.
Este recomandat ca documentatiile s fie realizate n sistemul national pentru a avea un sistem
unic de proiectie, sau, dac se lucreaz pentru anumite domenii de interes national (exploatri minere,
complexe hidroenergetice sau de irigatii - desecri, lucrri pentru realizarea cadastrului urban, lucrri
pentru HG 34/1991 s.a), s existe puncte cu cocordonate comune n ambele sisteme de coordonate.
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.66
4. SISTEMUL EUROPEAN DE REFERINT EUREF
4.1 Generalitti
Avantajele tehnologiei GPS au fost recunoscute cu multi ani n urm, si astfel a fost organizat o
prima campanie GPS n scopul de a stabili un Cadru uniform European de Referint (EUREF) n partea
vestic a Europei. Prin campanii succesive GPS, reteaua a fost extins spre prtile estice ale Europei si
n unele tri s-au efectuat campanii mai sustinute. Cooperarea international n interiorul Europei a avut
ca rezultat realizarea unei precizii foarte mari a retelei geodezice tridimensionale cu legturi la sistemele
de referint globale si nationale.
S-au dezvoltat strategii si linii de ghidare pentru ndesirea retelei, proceduri de observare, flux
de date si analize de date. Aceasta a condus la reteaua permanent GPS de azi, cuprinznd mai mult de
80 de statii, service de pstrarea datelor si este sustinut de 12 centre de analiz. Rezultatele arat o
retea dens si precis (+/-3mm in componenta orizontal, +/-6mm in componenta de altitudine).
Din 1995, accentul a fost pus pe componenta de altitudine, rezultnd o adaptare, extindere si o
imbunttire a Retelei de Nivelment a Uniunii Europene (UELN) si stabilirea unei Retele de Referint
GPS pe Vertical European (EUVN). Astzi, contributiile retelei EUREF se ndreapt spre activitti
multi-disciplinare cum ar fi estimarea parametrilor meteorologici si legarea mirelor de maree (stabilirea
altitudinilor zero ale diverselor mri si diferentele dintre ele).
Pentru a ntelege mai bine aspectele legate de realizarea retelei EUREF, este necesar definirea
unor termeni de referint. n pozitionarea geodezic, unde tehnicile de observare dau pozitiile absolute
ntr-un sistem terestru de referint este fundamental s ai definit un sistem terestru si inertial de
referint.
4.2 Sisteme de referint si cadre de referint
4.2.1 Sistemul de Referint International Ceresc
(ICRS International Celestial Reference System)
Sistemul de Referint International Ceresc (ICRS) si Sistemul Terestru International de
Referint (ITRS International Terrestrial Refrence System) sunt dou sisteme care rezolv problemele
geodezice si geodinamice cu precizie foarte mare. Ambele sisteme sunt realizate prin cele mai avansate
si precise tehnici bazate pe cooperare international si sunt ntretinute cu costuri ridicate. ICRS este
baza pentru realizarea unui sistem inertial care serveste, printre altele, la descrierea miscrii corpurilor
ceresti si a satelitilor artificiali. ITRS reprezint cel mai precis sistem terestru de referint si care este
sursa pentru realizarea unui alt sistem de referint (de exemplu WGS84) si a sistemelor de referint
regionale (de exemplu ETRS89). ICRS const n algoritmi si constante recomandate pentru realizarea
lui si a Cadrului de Referint International Ceresc (ICRF). Algoritmii si constantele contin, de obicei, un
set de parametri si proceduri calculate (de exemplu formule pentru precesie si nutatie, coeficientii
precesiei, amplitudinea nutatiei, viteza luminii, etc.).
4.2.2 Cadrul de Referint International Ceresc
(ICRF International Celestial Refernece Frame)
Cum a fost spus mai sus, n concordant cu recomandarea Uniunii Astronomice Internationale
(IAU), ICRS este realizat de ICRF. ICRF este definit de coordonatele ecuatoriale precise J2000.0 a
sursei radio extragalactice determinate cu observatii Interferometrice (VLBI Very Long Baseline
Interferometry). Este un cadru a crei directie este n concordant cu cea din catalogul FK5. Originea
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.67
este localizat n baricentrul sistemului solar n conformitate cu modelul observatiilor n cadrul
relativittii generale. Stabilitatea cadrului este bazat pe presupunerea c sursa nu are propria ei miscare.
Sunt efectuate verificri permanente pentru a se asigura c aceast ipotez este real. Estimarea
coordonatelor, realizate de IERS, se bazeaz pe cadrul individual produs de Centrul de Analiz al IERS.
n fiecare an sunt realizate cadre extragalactice de grupuri independente VLBI. Selectia este fcut de
ICRF. Algoritmul selectat este proiectat la nceput pentru mentinerea directiilor axelor fixate pe
realizarea succesiv, n timp ce coordonatele surselor individuale sunt perfectionate. Unele erori
sistematice n pozitionarea surselor si n orientarea axelor pot fi cauzate de precizia slab a teoriei
precesiei si nutatiei a conventiei IAU. Erorile sunt de nivelul a ctorva milisecunde de arc. Alt tip de
posibile erori sistematice sunt legate de elevatia joas a observatiilor n cazul extinderii nord-sud a
observatiilor n retea. Accesul la ICRS se poate face prin catalogul surselor de coordonate publicat n
Raportul Anual IERS. Este inclus un total de 608 obiecte ale cror coordonate vor fi monitorizate pe
baza unor noi observatii si a unei noi analize.
4.2.3 Sistemul Terestru Conventional de Referint
(CTRS Conventional Terrestrial Reference System)
Pentru rezolvarea problemelor practice de navigatie, geodezie, geodinamic, geofizic si alte
geostiinte, este necesar s avem un sistem de coordonate legat de pmnt. Astfel, este necesar s
definim un sistem geocentric, terestru, care s fac posibil rezolvarea problemelor de pozitionare cu un
bun nivel de precizie. Sistemul Terestru Conventional de Referint (CTRS) adoptat de toate metodele
de analiz a seturilor de date individuale pe baz de observatii tehnice (VLBI, SLR, LLR, GPS, DORIS,
PRARE) sau combinatii de solutii individuale ntr-un set unificat de date (coordonate ale statiilor,
parametri de orientare ai Pmntului, etc.), urmreste, n conformitate cu rezolutia IAG nr. 2, adoptat
de Adunarea General a IUGG din Viena, 1991, urmtoarele criterii:
- CRTS este un sistem local de coordonate n sensul teoriei relativiste valabil pe Pmnt si este
n jurul nivelului de precizie de 10
-10
;
- CTRS este un sistem cvasicartezian de rotatie, definit de un sistem geocentric non-rotativ de o
rotatie a spatiului;
- Coordonata timp, coordonata geocentric timp (TGC);
- CTRS este geocentric, centrul de mas fiind definit de ntreg Pmntul, inclusiv oceanele si
atmosfera;
- Scara este cea a cadrului Pmnt local, n ntelesul teoriei relative a gravitatiei;
- Orientarea este dat initial de orientarea BIH la 1984.0, axa Z este ndreptat spre polul de
referint IERS, care este identic cu CIO (Originea Conventional International), iar axele Xsi
Y de la meridianul zero, identic cu realizarea 1984.0 a BIH;
Evolutia n timp a orientrii va crea rotatii globale nereziduale cu privire la miscrile crustale.
4.2.4 Sistemul Terestru de Referint
(Terrestrial Reference System)
Un sistem Conventional Terestru de Referint este realizat printr-un sistem cadru de referint, ca
de exemplu un set de coordonate pentru o retea de statii. Observatiile tehnice sunt: VLBI, SLR, LLR,
GPS, DORIS si PRARE sau combinatii ale lor. Realizarea este specificat de coordonate ecuatoriale
carteziene, n acest caz coordonatele geografice fiind referite la elipsoidul GRS80. Sistemul
Conventional Terestru de Referint care este monitorizat de Serviciul International de Rotatie al
Pmntului (IERS), este denumit Sistemul International Terestru de Referint (ITRS International
Terrestrial Reference Frames). Fiecare tehnic spatial geodezic furnizeaz un set de date
corespunztor, din analiza cruia rezult realizarea ITRS. n interiorul ITRS, fiecare Cadru Terestru de
Referint este exprimat direct sau dup transformare ca o realizare a ITRS. Pozitia unui punct localizat
pe suprafata fizic a Pmntului, la o epoc t, cu coorodonatele X(t), functie de timp este dat de
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.68
expresia:
, ) , )
A + + =
x
x 0
0
0
t X t t
dt
dX
X ) t ( X (4.1)
n care:
- AX
x
este corectia datorat efectului de schimbare n timp (un permanent efect este cel al
mareei terestre, greutatea oceanelor, mareele polare, reculul postglacial, ncrcarea
atmosferic, efectele seismice si vulcanice, variatia nivelului apei subterane, variatia
centrului de mas al Pmntului),
- X
0
, t
0
sunt coordonatele si timpul la epoca initial. Pentru a obtine precizia cerut de 10
-10
,
corectiile trebuie s fie determinate cu o precizie de circa 1 milimetru.
Realizarea ITRS este produs de IERS sub numele de Sistemul International Terestru de
Referint (ITRF - International Terrestrial Reference Frames). Aceast realizare const n lista
coordonatelor si viteza pentru statiile selectate de IERS. IERS este reprezentat de realizarea unor
mbunttiri succesive ale pozitiei, cunoscute ca ITRF-YYsi publicate de Raportul Anual IERS pe anul
YY. Pornind de la eticheta dat de ITRF-YY, se poate deriva un cadru corespunztor ETRF-YY care
reprezint coorodonatele statiilor apartinnd lui ITRF si localizate n Europa.
4.2.5 Sistemul Geodezic Mondial 1984
(WGS84 World Geodetic System)
Sistemul terestru de referint utilizat de Departamentul de Aprare al U.S. (DoD Departament
of Defense) pentru pozitionarea GPS este WGS84. Acest sistem global geocentric este al patrulea n
seria de sisteme de coordonate geocentrice definite de DoD din 1960. Sistemul Geodezic Mondial 1960
a fost succedat de sisteme mbunttite n 1966 si 1972, culminnd cu WGS84, cincisprezece ani mai
trziu. Acest Sistem Conventional Terestru de Referint furnizeaz un set de modele globale coerente si
este baz pentru toate planurile si hrtile produse de DoD, pentru navigatie si geodezie. Se baza pe
observatii TRANZIT Doppler amplasate pe niste statii de urmrire. Aceste tehnici satelitare TRANZIT
pun la dispozitie un cadru global de referint cu o precizie estimat la 1-2 metri. n ultima decad,
datorit eforturilor depuse de comunitatea stiintific si tinnd cont de cerintele de precizie de milimetru,
s-au obtinut rezultate bune n precizia cadrului terestru de referint (ITRF). Printre cerinte, DoD a dorit
o pozitionare cu precizie de un decimetru. Din acest motiv, NIMA a fcut o revizuire a sistemului
WGS84 si a initiat un efort de a sustine cerintele DoD privind precizia de pozitionare. Acest efort a
inclus mbunttirea coordonatelor statiilor GPS de urmrire, rafinarea modelului gravittii terestre,
mbunttirea modelului de geoid (EGM96) cu referint la verticala lumii si o examinare a altor modele
si parametri implicati n definirea sistemului WGS84. Dup unele ncercri care au inclus mai multe
constante precise n acord cu standardele IERS, ultima versiune numit WGS84 (G873), coincide cu
ITRF 96 cu o diferent de ctiva centimetri. Pe viitor cercetrile se vor focusa pe un model de gravitate
al Pmntului si va fi asociat cu geoidul. Cadrul de referint se va ghida spre miscarea plcilor tectonice
si o nou stationare a statiilor. O cerint a utilizatorilor de GPS este introducerea n modelul de calcul a
efectului mereei terestre.
4.2.6 Transformri ntre sisteme de referint
Relatiile de transformare ntre ICRF si ITRF sunt date de formula:
, )
ITRF ICRF
X PNTXY X = (4.2)
n care P este matricea precesiei, N este matricea nutatiei, T este matricea care d rotatia fat de
timpul sideral adevrat S, iar XY sunt matricele de transformare din cadrul terestru n cadrul conectat la
polul instantaneu, X
ICRF
este vectorul referit la ICRF si, similar, X
ITRF
este vectorul referit la axele ITRF.
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.69
Formulele de transformare ntre dou sisteme terestre de referint sunt cele cunoscute si vor fi
tratate n capitolul de transformri de coordonate.
n tabelul 4.1 sunt prezentate valorile numerice ale parametrilor de transformare dintre ITRF97
si precedentele realizri ITRF-YY. De notat c pentru a completa diferenta pentru ITRF93, trebuie
introdus n sistem schimbarea timpului /y. ITRF97 a fost creat prin combinarea coordonatelor a 325
de statii cu mai mult de 550 de observatii. Setul de coordonate provine din tehnici spatiale individuale
(4 solutii individuale VLBI, 5 SLR, 6 GPS, 3 DORIS, 1 combinat SLR+DORIS), colectate de IERS n
1998-1999.
TABELUL 4.1 Parametri de transformare dintre ITRF97 si cadrele precedentele
Cadru de
referinta
T1
cm
T1
cm
T1
cm
D
Ppb
R1
mas
R2
mas
R3
mas
An
epoca
ITRF88 1.8 0.0 -9.2 7.4 0.1 0.0 0.0 1988.0
ITRF89 2.3 3.6 -6.8 4.3 0.0 0.0 0.0 1988.0
ITRF90 1.8 1.2 -3.0 0.9 0.0 0.0 0.0 1988.0
ITRF91 2.0 1.6 -1.4 0.6 0.0 0.0 0.0 1988.0
ITRF92 0.8 0.2 -0.8 -0.8 0.0 0.0 0.0 1988.0
ITRF93
0.6
-0.29y
0.5
-0.04y
-1.5
0.08y
0.4
-0.39
-0.11y
0.80
-0.19y
0.96
-0.05y
1988.0
ITRF94 0.0 0.0 0.0 0.0 0.0 0.0 0.0 1988.0
ITRF96 0.0 0.0 0.0 0.0 0.0 0.0 0.0 1988.0
4.2.7 EUREF Evolutie, statutul actual si perspective.
n 1987, IAG la Adunarea General din Vancouver si CERCO la Adunarea Plenar din Atena au
decis independent s dezvolte un nou Sistem Geodezic European de Referint bazat pe GPS si care s
ndeplineasc urmtoarele cerinte:
- reprezentarea unui cadru geocentric de referint pentru orice proiect geodezic-geodinamic de
precizie pe platoul European;
- s fie o referint precis si foarte apropiat de WGS84 pentru a fi utilizat n geodezie si n
toate felurile de navigatie n ntreaga Europ;
- s fie o referint larg, continental, pentru seturile de Dat Cartografic Digital
multinational, derivate din multiplele seturi de Datumuri nationale existente n Europa.
ED50, respectiv ED87 nu ndeplinesc cerintele speciale privind precizia general si orientarea
pozitiei globale tridimensionale. Pe de alt parte WGS84 nu poate garanta cerintele privind precizii
foarte mari, n principal derivate din observatii Doppler la timpul respectiv.
La sfrsitul anilor 80, IERS combinat cu solutiile date de SLR/VLBI (ITRF), au furnizat
realizarea celui mai bun sistem geodezic global de referint. Subcomisia EUREF a IAG si CERCO
WGVIII au agreat Sistemul de Referint European bazat pe ITRF si au selectat circa 35 de statii
Europene SLR si VLBI s fac parte din solutia ITRF calculat pentru epoca 1989.0. Acestea au fost
stabilite ca set de baz al sistemului geocentric de coordonate definit ca ETRF89 (Sistemul Terestru
European de Referint), primul Sistem de Referint European (ETRS89) realizat. Epoca selectat,
1989.0 (ETRF89) este un subset al solutiei globale ITRF89.
Datorit deplasrii plcilor tectonice, coordonatele statiilor subsetului European se modific n
timp cu circa 2.5 centimetri pe an (dup alti autori 2.7 centimetri pe an). Totusi, s-a convenit c
ETRS89 s-ar roti cu toat partea stabil a Europei, astfel c relatia statie-statie (diferenta relativ) se
pstreaz fix. Desigur, pornind de la aceast ipotez, o definire a coordonatelor statiilor n alt sistem de
referint se poate schimba usor n timp. Parametri de transformare din ITRF n ITRF89, respectiv
ETRF89 sun liniari. n consecint, parametri de transformare dintre ETRF si WGS84 vor varia usor si
vor trebui actualizati la circa 10 ani ca interval de timp, tinnd cont de deplasarea plcii Europene care
nu mai poate fi neglijat.
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.70
Din cercetrile efectuate, la nceput, ITRF89, respectiv ETRF89, fat de WGS84 aveau o
diferent de 1-2 centimetri. n prezent, diferenta este de ctiva centimetri. Elipsoidul de referint pentru
EUREF este elipsoidul GRS 80, care nu diferm mult fat de elipsoidul WGS84.
Pricipalele campanii ale proiectului au fost desfsurate n anul 1989 pentru Vestul Europei si
ncepnd din 1991 noul cadru de referint a fost extins pe majoritatea teritoriul European si n zonele
adiacente. n prezent EUREF acoper cele mai multe tri Europene cu exceptia Rusiei si Belarusiei. De
asemenea n cele mai multe tri reteaua este ndesit. n Tabelul 4.2 se prezint distributia statiilor
EUREF n Europa. n functie de datele culese ntr-o perioad de 10 ani, s-au stabilit mai multe clase de
precizie n functie de modul de campanie GPS. Clasa A reprezint o precizie absolut de 1 centimetru n
cadrul sistemului ITRF n perioada 89-99, clasa B are precizia de 1 centimetru la epoca dat (la care s-
au executat msurtorile), iar clasa C are o precizie de peste 5 centimetri n perioada 89-99.
TABELUL 4.2 Campanii EUREF
Nr.
crt.
Denumire
Interval de
timp
Nr. de
statii
Tara
0 ITRF 42
1 GPS EUREF 89 Mai 89 93 Europa
2 Mobile VLBI 89 Iunie sept 89 6 Europa
3 EUREF NW 90 Iul Aug, 90 39 Nord vest
4 EUREF CS/H 91 Oct Nov 91 22 Cehoslovacia, Ungaria
5 Mobile VLBI 92 Mai Aug 92 8 Europa
6 EUREF POL 92 Iulie 92 30 Polonia
7 EUREF BAL 92 Aug Sep 92 24 Baltic
8 EUREF BUL 92 Oct 92 14 Bulgaria
9 EUREF GB 92 Oct 92 31 M. Britanie
10 EUREF CYP 93 Ian 93 11 Cipru
11 EUREF D93 Mai 93 27 Germania, Olanda
12 EUREF F93 (RRF93) Mar Apr 93 23 Franta
13 EUREF LUX BD4 Mar 94 19 Luxemburg, Belgia, Germania
14 EUREFSLO/CRO 94 Mai Iun 94 22 Croatia, Slovenia
15 EUREF DK 94 Aug Sep 94 12 Danemarca
16 EUREF Ucraina 94 Iun 94 14 Ucraina
17 EUREF ROM 94 Sept 94 17 Romania
18 EUREF NOR 94/95
Sep-Oct 94
Aug Oct 95
87
70
Norvegia
19 EUREF A 94/95 Oct 94/95 17 Austria
20 EUREF EIR/GB 95 Apr 95 24 Islanda, GB
21 EUREF Iberia 95 Mai 95 43 Spania, Portugalia
22 EUREF Iceland 95 Iul 95 191 Islanda
23 EUREF FYROM 96 Aug 96 10 Macedonia
24 EUREFMalta 96 Oct-Nov 96 13 Malta
25 EUREF Balear 98 Apr 98 6 Baleare
26 EUREF Alb., BH, Yug. Sept 98 29 Albania, Bosnia Hert., Iugoslavia
27 EUREF Moldova Mai 99 5 Moldova
Densitatea si ntretinerea sistemului EUREF este dat n principal de sistemele GPS si are ca
rezultat cresterea numrului de statii GPS permanente n Europa. Aceste statii au ca principale scopuri:
- furnizarea legturii dintre ETRS/ITRS si sistemele nationale de referint prin EUREF/IGS;
- aplicatii ale msurtorilor bazate pe post procesare;
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.71
- msurtori n timp real si/sau msurtori de precizii diferite (DGPS, RTK);
- monitorizarea miscrilor de teren (ridicri post glaciale, miscri tectonice de-a lungul faliilor
active, etc).
Cele mai multe din statiile permanente nu sunt o parte a retelei globale ICS. Simpozionul
EUREF din 1995 cu tema Apel pentru ndesirea sistemului ITRF prin analiza regional GPS ca Centru
de Analiz a Retelelor Asociate IGS propune IGS-ului s considere reteaua permanent EUREF ca o
ndesire a retelei globale IGS. Propunerea a fost acceptat oficial de IGS n mai 1996. n acest context
EUREF garanteaz o analiz de rutin a datelor din statiile permanente Europene pe baza procesului de
distributie . Procesul este asigurat de 10 Centre Locale de Analiz care sptmnal supun spre cercetare
solutii pentru o subretea EUREF Centrului de Analiz Regional (CODE Berna), care este responsabil
pentru combinarea sptmnal a solutiilor subretelelor libere ntr-o solutie European realizat de IGS.
n mai 1997, centrul de analiz CODE a transmis prima solutie anual EUREF ctre IERS si de atunci
toate statiile permanente au fost incluse n realizarea ITRS si a fost posibil utilizarea lor ca statii de
analiz a campaniilor EUREF. Initial reteaua consta din 50 de statii permanente n timp ce azi sunt
aproape 50 de statii GPS permanente care contribuie la solutia combinat European. Unele din acestea
furnizeaz n fiecare or fisiere cu date pentru aplicatii GPS meteorologice. Rezultatele Retelei
Permanente EUREF sunt coordonate de Observatorul Regal din Belgia, iar acum sunt pe cale de a fi
preluate de Serviciul de Retea EUREF care ar consta din statii permanente, centrul de date, centrul de
analiz, o conducere executiv, un birou central si unul de proiecte speciale.
4.3 EUREF si sistemele nationale terestre de referint.
Dup cum s-a discutat, este nc putin prematur de spus dac tehnologia GPS permite o stabilire
complet si foarte precis a cadrului de referint 3D, care s prezinte omogen pozitia pe ntreg globul. n
Europa dezvoltarea rapid n timpul ultimei decade a dus, n cele mai multe tri, la situatia n care
reteaua nou (ETRF) coexist cu retelele clasice planimetrice si altimetrice care sunt utilizate pe scar
larg de un mare numr de topografi care utilizeaz aparatura clasic. n timp ce reteaua ETRF este
caracterizat de un grad mare de precizie, omogenitate si integritate, de o densitate variabil de la 1
punct la 50 km
2
la 1 punct la 500 km
2
, retelele nationale se disting prin separarea pozitiei orizontale de
pozitia altimetric, prin referirea la coordonatele nationale plane si altimetrice, densitatea este de 1
punct la 2-20 km
2
, n funtie de zon, prin precizia mai sab comparativ cu cea obtinut din date GPS,
prin omogenitatea mai slab a retelei. n prezent sunt 46 de tri n Europa si, prin acordul de la
Grothenn (1994), sunt utilizati 5 elipsoizi diferiti si cel putin 8 proiectii cartografice.
Prima problem const n determinarea parametrilor de transformare dintre sistemul national de
referint si ETRF. De obicei se reduce la alegerea numrului de puncte cu coordonate comune n ambele
sisteme si la distrbutia lor. Ambele aspecte sunt direct legate de zon si de altitudine (panta terenului n
zon). Se pune inevitabil ntrebarea: cum ar putea reteaua GPS s mbuntteasc reteaua national? Cu
respectarea traditiei topografice si geodezice privind realizarea planurilor si hrtilor existente, cu
economie de timp si pret, cu cerintele necesare n prezent pentru o retea geodezic, cadrul ETRF
rspunde n general urmtoarelor cerinte:
- S permit o utilizare direct a tehnologiei GPS (reprezentarea pe un set de coordonate
geocentric);
- S permit utilizarea tehnicilor clasice terestre de msurare (reprezentarea ntr-un set de
coordonate plane, referite la un sistem national de proiectie);
- S permit utilizarea hrtilor existente la scar 1:1000 sau mai mici, fr modificri;
- S ajute lucrrile ingineresti, de cadastru, si aplicatii GIS/LIS cu coordonate;
- S fac o utilizare extensiv a sistemului de referint existent.
n prezent, fiecare tar European care are un proiect EUREF, are ocazia de a-si mbuntti
precizia retelei geodezice existente. Se pot obtine coordonate pentru zeci sau sute de puncte de control
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.72
si, n plus, obtinerea de coordonate ETRF pentru toate punctele care vor sta la baza transformrilor de
coordonate si obtinerea parametrilor de transformare. Se pot utiliza diverse strategii pentru
mbunttirea punctelor de control din reteaua ETRF.
Pentru a obtine coordonatele n sistem Stereografic 1970 pentru punctele msurate n sistem
WGS 84 se va utiliza algoritmul Helmert pentru determinarea celor 7 parametri. Etapele de lucru sunt
descrise mai jos:
1. Existenta a minim cinci puncte comune determinate n sistem absolut WGS 84 si Stereografic
1970. 2. Calculul ondulatiei geoidului pentru punctele comune. Transformarea cotei normale h
n
n cot
elipsoidal h
e.
.
3. Transformarea coordonatelor din sistemul Stereografic 1970 (x,y,h
e
)
KR
prin formulele cu
coeficienti constanti, n coordonate geodezice (B,L,h
e
)
KR
referite la elipsoidul Krasovski.
4. Transformarea coordonatelor geodezice (B,L,h
e
)
KR
n coordonate carteziene (X,Y,Z)
KR
.
5. Coordonatele punctelor comune (X,Y,Z)
WGS
determinate cu receptoare GPS referite la WGS-
84 si (X,Y,Z)
KR
referite la elipsoidul Krasovski sunt folosite la determinarea celor 7 parametri ai
transformrii Helmert .
6. Coordonatele (X,Y,Z)
WGS
pentru alte puncte dect cele comune pot fi transfomate cu ajutorul
celor 7 parametri Helmert n (X,Y,Z)
KR
referite la elipsoidul Krasovski folosind parametri de
transformare calculati n pasul anterior.
7. Toate coordonatele carteziene (X,Y,Z)
KR
pot fi transformate n coordonate geodezice
(B,L,h
e
)
KR
.
8. Punctele cu coordonate geodezice (B,L,h
e
)
KR
de pe suprafata elipsoidului sunt proiectate pe
planul secant (Sistemul Stereografic 1970) prin formule cunoscute de la Cartografia matematic,
rezultnd (x,y,h
e
)
KR
.
9. Se aplic ondulatia cvasigeoidului si se obtine cota referit la cvasigeoid h
n
. n acest mod s-au
obtinut coordonatele plane n sistem Stereografic 1970, iar cota referit la cvasigeoid (x,y,h
n
)
KR
.
4.4 GPS si datumul European de altitudine.
n Europa exist n prezent sisteme nationale de altitudine cu datum diferit. Peste 40 de tri
Europene utilizeaz 19 sisteme de referinte a mareei, diferentele respectnd msurile de referint ale
mareei UELN (Amsterdam), variind de la +16 la -231 centimetri (Sacher et al. 1999). Statiile de
determinare ale mareei ale sistemului de altitudini nationale n Europa sunt amplasate la oceane si mri
interne Marea Baltic, Marea Nordului, Marea Mediteran, Marea Neagr, Marea Adriatic, Oceanul
Atlantic. De notat c datumul utilizat pentru altitudini este de natur istoric si nu toate punctele 0 sunt
referite la nivelul mediu al mrii. Unele puncte 0 sunt referite la nivelul minim al mareei (Ostend) sau la
cel maxim. De exemplu punctul zero pentru Amsterdam este referit la nivelul mediu al mareei din 1684.
Circa 50% din statele Europene utilizeaz altitudinile normale, 35% altitudinile ortometrice si n jur de
15% altitudinile ortometice normale.
Avnd n vedere unificarea sistemului de referint GPS, CERCO cere urgent realizarea
Sistemului European de Altitudini uniform pentru unificarea Datelor de Baz pentru Cartografia
Digital. Noul sistem se va baza pe sistemul de altitudini normale si va fi referit la Mareea msurat la
Amsterdam. nc din 1984 s-a ncercat rezolvarea problemei n cadrul Subcomisiei EUREF. Aceast
unificare urmreste dou aspecte. Primul este lrgirea extensiv si intensiv a UELN (Reteaua
Unificat a Nivelmentului European), care nseamn ncorporarea a dou retele: reteaua primar a noilor
tri (Central si est Europene) si reteaua de nivelment secundar a tuturor trilor Europene. Al doilea
aspect l reprezint realizarea unui proiect GPS avnd ca tint interconectarea tuturor datumurilor
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.73
Europene de nivelment.
n Europa sunt n prezent dou retele continentale de nivelment definind dou sisteme de
altitudini: Amsterdamsi Baltic. Prima retea continental de nivelment este UELN, a doua UPLN (Retea
de Nivelment Unitar si Precis) care acoper partea European a fostei Uniuni Sovietice si trile care
au apartinut blocului Sovietic. UPLN const din liniile de nivelment de ordinul I care traverseaz
Bulgaria, Cehia, Germania de Est, Polonia, Slovacia, Ungaria, Belarus, Estonia, Letonia, Lituania,
Ucraina, Moldova, Romnia, Rusia si Georgia. UPLN a fost msurat n anii `50 si remsurat n anii `70.
Contine peste 350 de puncte nodale, observatiile au fost compensate ca diferente de altitudini normalesi
referite la mareea din Kronstadt (Rusia). Stabilirea UELN a demarat la sfrsitul anilor `70, o nou
compensare a fost realizat n 1986 si un nou proiect de extindere si ndesire a UELN cu repetarea
compensrii a fost lansat n 1995 (UELN-95). Din permanenta compensare trebuie s rezulte
dezvoltarea unei retele a deplasrilor pe vertical. Observatiile n compensare sunt diferentele de
altitudini geopotentiale, parametri estimati sunt numerele geopotentiale. Astfel este usor s se poat
trece de la unitatea geopotential la un tip arbitrar de cote. n 1998 UELN avea mai mult de 3000 de
puncte nodale. Probleme de rezolvat pe viitor: extinderea retelei la Marea Neagr si fortarea Marii
Britanii si a blocului Scandinavic s ncorporeze mai multe linii de legtur a nivelmentului cu trile
baltice.
Obiectivele proiectului EUVN sunt multiple: stau la baza unificrii sistemului European de
altitudini care trebuia s aib o precizie de ctiva centimetri, furnizeaz puncte de referint pentru
determinarea geoidului European, leag msurarea mareilor la diferite oceane si mri pentru
determinarea variatiilor dintre ele si pregteste sistemul de referint European geocinematic. Proiectul
EUVN uneste trei retele Europene: dou de nivelment (UELN si UPLN) si EUREF.
Faza initial a proiectului, numit EUVN97 a fost realizat n 1997/1998 ca o ntelegere (joint
venture) a tuturor trilor Europene participante la EUREF. Totalul de 217 statii EUVN, distribuite n
aproape toate trile Europene cuprind: 37 de statii permanente, 79 de statii EUREF, 53 de puncte nodale
pentru nivelmentul de ordinul I si 63 de puncte de msurare a mareei. Toate statiile EUVN au fost
legate la retelele nationale de nivelment de ordinul I. Campania GPS a fost realizat simultan pentru
toate statiile din 21 mai pn n 29 mai 1997. Precizia obtinut la compensare a fost de 4-5 milimetri,
dar precizia real nu poate fi mai bun de 10 milimetri. Proiectul continu cu colectarea datelor de
nivelment si gravitate.
4.5 Altitudini GPS si geoidul n Europa.
Dup cum este cunoscut, definirea altitudinilor nivelurilor mrilor este legat implicit de geoid
(altitudini ortometrice) sau de cvasigeoid (altitudini normale). Un nou datum vertical poate fi definit
prin alegerea suprafatei 0 a (cvasi)geoidului. Astfel, att adncimile marine ct si altitudinile de pe uscat
pot fi incluse n sistemul global geocentric. O dat definit suprafata de referint, altitudinile mrilor pot
fi determinate prin calcule teoretice sau direct utiliznd msurtorile GPS. Fezabilitatea altitudinilor
GPS depinde esential de calitatea modelului de geoid pentru teritoriul msurat. Acest model trebuie
legat la ambele cadre de referint GPS si la reteaua de nivelment specific teritoriului respectiv.
Realizarea unui model de geoid precis si omogen este greu de realizat datorit msurtorilor
gravimetrice destul de srace pe ntregul continent.
Simultan cu msurtorile GPS si interconectarea nivelmentului diferitelor datumuri Europene se
determin un model de cvasi (geoid) foarte precis. Cel mai bun model global geopotential este EGM96
(360,360). S-a dezvoltat ntr-un efort comun al NIMA (DoD, USA) si NASA GSFC. Modelul este bazat
pe observatii satelitare, anomalii grevimetrice si date altimetrice satelitare.
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.74
4.6 Realizarea retelei EUREF n Romnia.
4.6.1 Reteaua realizat de NGS n anul 1995.
Realizarea retelei EUREF n Romnia s-a realizat n anul 1994 printr-un program comun al
Ministerului Agriculturii si Alimentatiei din acea vreme, reprezentat de fostul IGFCOT (Institutul de
Geodezie, Fotogrammetrie, Cartografie si Organizarea Teritoriului), Directia Topografic Militar si
NGS (SUA).
n cadrul acestei determinri s-au efectuat legturi cu Ungaria, Bulgaria si Turcia. Scopul lucrrii
l-a constituit determinarea coordonatelor a 7 puncte de baz, de tipul A (Capitolul 4.2.7), care s devin
baz pentru determinrile ulterioare ale unor puncte de tipul B sau C. Aceste statii au fost legate la 3
puncte ale retelei EUREF: Madrid (Spania), Onsala (Suedia) si Wettzell (Germania). Coordonatele
celor trei puncte erau determinate n sistemul de coordonate ITRF92. n prelucrarea datelor au fost
considerate puncte fixe, fr erori. Initial fuseser alese si punctele Matera (Italia) si Graz (Austria),
dar au fost respinse datorit instabilittii tectonice a primului si a unei erori de cot a celui de al doilea.
Coordonatele elipsoidale ale clor trei puncte au fost referite la sistemul ITRF92, epoca 1994.0. Aceste
valori au fost aduse la epoca 1994.7, utiliznd viteza dat de IERS si aceste valori au intrat n
determinarea coordonatelor retelei EUREF din Romnia (Figura 4.1)
Figura 4.1- Vectori din trei statii IGS folosite in determinarea coordonatelor
Punctului DEALUL PISCULUI in Bucuresti
Punctele romnesti alese pentru a deveni puncte de ordinul A ale retelei EUREF Romnesti au
fost: Constanta, Dealul Piscului, Mosnita, Osorhei, Sfntu Gheorghe, Srca si Stnculesti. Toate sunt si
puncte de ordinul I a retelei nationale geodezice. De asemenea, dup cum se observ din Figura 4.2,
sunt bine repartizate pe teritoriul Romniei. Timpul de stationare pe fiecare punct a fost de 4 zile.
Colectarea datelor s-a fcut la 30, unghiul de elevatie pentru satelitii alesi a fost de 20. Precizia dorit
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.75
pentru coordonatele finale a fost de 5 milimetri + 1:10.000.000. Statia Dealul Piscului, localizat n
incinta Observatorului Militar Astronomic, a fost aleas ca origine a retelei, fiind determinat din cele
trei puncte si apoi a devenit punct cu coordonate cunoscute pentru celelalte 6 puncte. Programul de
prelucrare al datelor a fost elaborat de specialistii NGS. Tinnd cont de data la care a fost realizat,
programul a ncercat s cuprind toate elementele generatoare de erori.
Figura 4.2 Vectori folositi din DEALUL PISCULUI in Bucuresti pentru
determinarea coordonatelor pentru restul statiilor
Datele nregistrate timp de 4 zile au fost mprtite n sesiuni de cte 24 de ore, fiecare fiind
calculate separat. Punctul Dealul Piscului a fost determinat din cele trei puncte vechi. Coordonatele
finale ale acestui punct au fost obtinute din media celor patru valori, fiecare valoare venind din trei
determinri (Madrid, Onsala si Wettzell). Rezultatele sunt prezentate n Tabelul 4.3. Coordonatele
finale sunt n sistem ITRF92, epoca 1994.7.
Tabelul 4.3
X Y Z
4,098,299 m + 2,008,691 m + 4,440,543 m +
0.9764 m (-4 mm) 0.1345 m (-2 mm) 0.6464 m (-5 mm)
0.9806 m (0 mm) 0.1391 m (2 mm) 0.6528 m (1 mm)
0.9844 m (4 mm) 0.1356 m (-1 mm) 0.6575 m (5 mm)
0.9811 m (1 mm) 0.1377 m (1 mm) 0.6503 m (-1 mm)
Media 0.9806 m 3 mm 0.1367 m 2 mm 0.1616 m 4 mm
Punctul Dealul Piscului a devenit astfel baz pentru de terminarea celorlalte 6 puncte. De
asemenea, tot din acest punct au fost determinate si alte puncte din Ungaria, Bulgaria si Turcia. Astfel,
din Ungaria s-au determinat punctele: Mako, Penc, Sopron, Tarpa si Tenkes, din Bulgaria punctele:
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.76
Gabrowo, Kavarna, Sofia si Vidin, iar din Turcia punctul Yigilca. Puntele determinate n Ungaria fac
parte dintr-o retea care are ca scop determinarea miscrilor crustale n Europa Central si de Est. De
altfel, n Capitolul 4.6.2 vom discuta si despre aceast retea separat.
Din punctul Dealul Piscului s-au determinat deci toate celelalte puncte. ntruct timpul de
stationare cu punctele vechi, respectiv Madrid, Onsala si Wettzell, oricare punct (Constanta, Mosnita,
Osorhei, Sfntu Gheorghe, Srca sau Stnculesti) putea fi determinat direct din aceste trei puncte. Din
motive de timp, doar coordonatele punctului Mosnita au fost determinate separat din punctele Madrid,
Onsala si Wettzell, diferenta fat de determinarea din Dealul Piscului fiind de doar 1 milimetru pe axa
X, 3 milimetru pe axa Y si 3 milimetri pe axa Z. A fost astfel verificat ncadrarea n sistem.
n tabelul 4.4 sunt prezentate coordonatele rezultate pentru toate punctele nou determinate n
sistem ITRF92, epoca 1994.7, cu preciziile pe fiecare ax (X, Y si Z).
Tabelul 4.4
X Y Z
c
n
u
Denumire punct
(m) (mm)
CONSTANTA 4023362.174 2190844.225 4422995.434 2 3 5
MOSNITA 4153382.480 1623173.017 4545098.760 1 1 4
OSORHEI 4034633.470 1631849.595 4647381.833 3 1 9
SIRCA 3858208.781 1983192.079 4660288.149 4 1 6
SFINTU-GHEORGHE 4005316.891 1937791.947 4555276.099 2 2 6
STANCULESTI 4145351.453 1840743.996 4469797.363 3 2 7
MAKO, HUNGARY 4128720.608 1557707.433 4589954.437 4 2 6
PENC, HUNGARY 4052449.726 1417680.987 4701407.089 5 2 6
SOPRON, HUNGARY 4125618.981 1230226.025 4690656.320 2 1 12
TARPA, HUNGARY 3939065.778 1635574.742 4726647.295 3 3 11
TENKES, HUNGARY 4224902.717 1390480.313 4556477.784 4 3 15
GABROVO, BULGARIA 4227589.980 1996278.334 4324909.713 2 2 9
KAVARNA, BULGARIA 4083131.495 2205288.849 4361084.295 1 2 11
SOFIA, BULGARIA 4319372.535 1868687.640 4292063.933 5 1 10
VIDIN, BULGARIA 4233068.577 1773730.005 4414410.561 2 2 7
YIGILCA, BULGARIA 4117361.885 2517076.969 4157679.183 3 1 9
Rezultatele finale au fost reduse la Sistemul de coordonate EUREF89, sistemul unic de referint
n Europa. Parametri de transformare au fost furnizati de Grupul Tehnic de Lucru al EUREF.Formula
utilizat este urmtoarea:
) 0 . 1989 (
) (
) (
) (
0
0
0
) (
) (
) (
92
1 2
1 3
2 3
92 89
(
(
(
]
1
A
A
A
+
c
ITRF
c
c
c
ITRF
c
c
c
ETRF
t
t z
t y
t x
z
y
x
t z
t y
t x
z
y
x
e e
e e
e e
(4.3)
n care:
- AX, AY, AZ sunt translatiile bazate pe transformarea global ITRF92-ITRF89, incluznd si
coeficientul de scar;
- e1, e2, e3 sunt rotatiile din 1992 napoi la 1989, datorate miscrii platoului European.
Parametri acceptati pentru translatii si rotatii sunt cei definiti de Boucher n 1993:
- AX = 3.8 cm, AY = 4.0 cm, AZ = -3.7 cm
- e
1
= 0.21 mas/an, e
2
= 0.52mas/an, e
3
= -0.68 mas/an.
Introducnd aceste date n formula (4.3), se obtin coorodonatele globale teridimensionale n
sistem ETRF89 pentru fiecare punct n parte coordonatele finale sunt prezentate n Tabelul 4.5.
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.77
Tabelul 4.5
X Y Z
Denumire punct
(m)
CONSTANTA 4023362.317 2190844.164 4422995.352
DEALUL PISCULUI 4098300.120 2008691.074 4440543.567
MOSNITA 4153382.614 1623172.953 4545098.673
OSORHEI 4034633.605 1631849.532 4647381.747
SIRCA 3858208.923 1983192.019 4660288.068
SFINTU-GHEORGHE 4005317.031 1937791.885 4555276.016
STANCULESTI 4145351.590 1840743.932 4469798.277
MAKO, HUNGARY 4128720.741 1557707.369 4589954.350
PENC, HUNGARY 4052449.858 1417680.924 4701407.002
SOPRON, HUNGARY 4125619.109 1230225.960 4690656.231
TARPA, HUNGARY 3939065.915 1635574.680 4726647.211
TENKES, HUNGARY 4224902.847 1390480.247 4556477.694
GABROVO, BULGARIA 4227590.118 1996278.269 4324909.627
KAVARNA, BULGARIA 4083131.637 2205288.787 4361084.212
SOFIA, BULGARIA 4319372.488 1868687.574 4292063.845
VIDIN, BULGARIA 4233068.712 1773729.940 4414410.473
YIGILCA, BULGARIA 4117362.030 2517076.907 4157679.101
Reteaua astfel obtinut ndeplineste fr dubii scopul pentru care a fost realizat, respectiv
crearea unei retele geodezice de ordinul A n Romnia. Preciziile au fost demonstrate, punctele acoper
foarte bine teritoriul Romniei. Trebuie doar tinut cont n viitoarele calcule de miscrile plcilor
tectonice n timp.
4.6.2 Reteaua realizat pentru determinarea miscrilor plcilor tectonice
n Europa Central, CERGOP.
Proiectul CERGOP a demarat primele msurtori n mai 1994 si cuprindea zece tri. O dat cu
aderarea Romniei la program, numrul trilor a crescut la 11. Primele msurtori n Romnia s-au
efectuat din 29 mai pn n 2 iunie 1995. Reteaua CERGOP si propune realizarea a trei scopuri
principale:
- realizarea cercetrilor geodinamice n zona Europei Centrale bazate pe msurtori foarte
precise n cadrul unei retele unice;
- investigatii profunde a profilului tectonic din zona Europei Centrale, zona Teisseyre
Tornquist, bazinul Carpatic si Panonic si influentele lor asupra regiunii Alpo-Adriatice;
- furnizarea unui cadru de referint subregional pentru studiul deformatiilor.
Initial au fost alese doar patru locatii: Tismana, Gilu, Iasi-Repedea si Mcin, pe considerente
geologice. Din nefericire aceste puncte nu s-au suprapus cu puncte ale retelei geodezice Romnesti
datorit nentelegerilor cu Directia Topografic Militar. n urma discutiilor purtate cu partea romn
care rspundea de proiect, numrul punctelor a fost suplimentat cu nc patru: Bucuresti, Fundata,
Vrancea si Vatra Dornei. Astfel, numrul total de puncte stationate a fost de opt. Din Figurile 4.3 si 4.4,
se observ trile participante la proiect (Germania, Polonia, Austria, Cehia, Slovacia, Ungaria, Italia,
Croatia, Slovenia, Ucraina si Romnia) si dispunerea punctelor determinate. Msurtorile au fost
repatate n anii urmtori, datele fiind prelucrate de IfAG, Germania. Timpul de stationare pe fiecare
punct a fost de 4 zile. Rezultatele au fost considerate forte bune. Din nefericire doar un punct din cele 8
a rezistat n timp, restul fiind distruse.
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.78
n prezent exist dou proiecte finantate de Germania si Olanda, care au ca scop deteminarea
miscrilor plcilor tectonice. n acest caz, punctele de determinat se suprapun pe puncte ale retelei
geodezice nationale, ceea ce le asigur o stabilitate mai mare n timp.
Fig. 4.3 Statiile retelei GERGOP din regiunea Central European
Fig. 4.4 Statiile retelei GERGOP din Romnia
CURS GEODEZIE SATELITARA
Capitolul 4. Sistemul European de referin EUREF pag.79
4.7 Statii permanente EUREF.
Dup cum se observ din cele spuse mai sus, fiecare tar are deja un numr de puncte cu
coordonate bine determinate n sistem EUREF. Aceste puncte ajut ulterior la ndesirea retelei EUREF
n fiecare tar. ndesirea se realizeaz cu un anumit numr de receptoare, functie de utilizator.
Statiile permenente au aprut din dou considerente principale:
- verificarea permenent a utilizatorilor;
- suplinirea numrului de receptoare.
Statiile permanente sunt niste receptoare GPS amplasate pe puncte cu coorodonate cunoscute si
care nregistreaz permenent date de la satelitii vizibili. Aceste date pot fi accesate liber pe Internet sau
pot fi cumprate contra cost de la un anumit serviciu. Astfel, dac un utilizator dispune doar de un
receptor GPS, acesta este amplasat pe punctul de determinat, statia permanent devenind statie cu
coordonate cunoscute si care determin punctul nou. Se acceseaz datele disponibile comune n timpul
msurtorilor de la statia permenent si astfel se pot calcula coordonatele punctului nou. Desigur, cu ct
numrul receptoarelor GPS al unui utilizator este mai mare, cu att disponibilittile cresc. Astfel, statia
permanent devine un punct de coordonate cunoscute care poate determina toate celelalte puncte noi,
sau poate verifica niste puncte cu coordonate deja cunoscute pe care sunt amplasate receptoare GPS. La
capitolul de prelucrare a datelor GPS se va trata pe larg modul practic de utilizare a statiilor permanente.
Statiile permanente pot fi utilizate si pentru controlul coordonatelor utilizatorilor. n acest caz se
cer datele brute din receptoarele GPS amplasate pe punctele noi. Se caut intervalul de timp stationat pe
fiecare punct si se descarc din datele statiei permanente intervalele (intervalul) respectiv. Se calculeaz
apoi coordonatele fiecrui punct nou si se compar cu datele prezentate.
n Romnia exist mai multe statii permanente n acest moment. Cea mai cunoscut este statia
amplasat pe cldirea Faculttii de Geodezie a Universittii Tehnice de Constructii Bucuresti. Are un
site pe Internet care poate fi accesat si care furnizeaz date permanent. Coordonatele statiei sunt
determinate n urma corelrii datelor cu statii permanente din Europa, pe o lung durat de timp.
Agentia National de Cadastru si Publicitate Imobiliar a amplasat n prima faz statii
permanente la sediul Agentiilor Judetene de Cadastru si Publicitate Imobiliar n localittile: Brila,
Suceava, Sibiu, Cluj si Timisoara. n faza a doua s-a mai amplasat o statie la Craiova, urmnd foarte
curnd s fie amplasat o alta la Constanta. n viitorul apropiat se preconizeaz amplasarea a nc dou
statii, la Bacu si la Baia Mare sau Satu Mare. Coordonatele acestor statii nu sunt nc disponibile,
ANCPI urmnd s perceap o tax pentru achizitionarea acestor coordonate.
Desigur, aceste statii nu pot satisface ca numr cerintele utilizatorilor. Receptoarele GPS de
clas geodezic pot utiliza aceste statii permanente chiar dac sunt la distante mai mari de ele.
Receptoarele mai putin performante si care nu au dect lungimea de und L1, dac sunt la distante mai
mari de 10 20 kilometri de statia permanent nu pot utiliza datele primite de la aceasta decat dupa o
stationare foarte lunga si utilizand programe speciale.
n cadrul programului de urmrire a deplasrilor plcilor crustale au fost amplasate un numr de
6 statii permanente de ctre Universitatea din Utrecht n colaborare cu Universitatea din Bucuresti,
Facultatea de Geologie si Geofizic.
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.80
5. METODE DE MSURARE GPS
Initial, receptoarele GPS au avut ca scop determinarea coordonatelor punctelor retelei geodezice
de sprijin acolo unde metodele clasice deveneau foarte costisitoare. Datorit evolutiei foarte rapide a
tehnologiei GPS n multe alte sectoare de activitate si a diversificrii aparaturii, utilizarea receptoarelor
s-a extins si la determinarea coordonatelor punctelor de detaliu.
Conceptul de retea geodezic de sprijin a cptat alt semnificatie prin introducerea tehnologiei
GPS. Astfel, a disprut elementul cel mai greoi: vizibilitatea ntre punctele retelei. Sigur, metodologia
GPS nu rezolv toate problemele geodeziei, exist elemente care perturb calitatea datelor sau chiar
compromit msurtorile (Capitolul 1.3). Cea mai important conditie n obtinerea unor rezultate bune
este vizibilitatea cerului din punctul n care se stationeaz cu receptoare GPS. Astfel, nu se pot efectua
determinri n pduri sau n liziere, de asemenea n zonele urbane cu cldiri foarte mari, etc. De
asemenea trebuie estimat perioada de msurare pentru a avea GDOP-ul foarte bun. Acest parametru
arat geometria satelitilor care trebuie s fie optim (Cpitolul 5.4.1, 5.4.2). Fcnd o analogie cu
topografia clasic, este similar cu a avea la retrointersectie puncte cu coordonate cunoscute rspndite
optim n cele patru cadrane.
5.1. Retele geodezice.
Pentru a ntelege mai bine utilizarea eficient a metodelor de msurare vom prezenta, pe scurt,
cteva considerente privind modul de realizare a unei retele geodezice.
n Volumul II al cursului de Topografie Geodezie am prezentat o clasificare a retelelor
geodezice, msurtorile efectuate, datumul geodezic, etc. Consideratiile din acest capitol sunt strict
legate de realizarea retelelor geodezice folosind receptoarele GPS si metoda combinat: statii totale si
receptoare GPS. Dup cum a fost prezentat n Capitolul 2, pe piat exist n acest moment o gam
complex de statii totale si receptoare GPS. Pentru fiecare tip de retea trebuie ales un anumit tip de
aparat care s corespund preciziei finale a retelei. Astfel, pentru retelele cu scop cadastral, precizia
final poate fi de ctiva centimetri. Pentru retelelele geodezice care au ca scop determinarea miscrilor
plcilor crustale se impun precautii speciale pentru obtinerea unei precizii milimetrice. n acest caz
marcarea punctelor se realizeaz astfel nct aparatele de msurat (receptoare GPS, statii totale) s poat
fi amplasate direct si fortat pe punct. Se elimin erorile de centrare a aparatelor pe punct si determinarea
nltimii aparatului. De asemenea, pentru aparatura de tip GPS, timpul de stationare pe punct se mreste
foarte mult. Atunci cnd nu este necesar o precizie foarte mare, de exemplu pentru realizarea retelelor
utilizate n lucrrile curente (ridicri topografice pe suprafete mici, planuri cadastrale, etc), aparatura
poate fi mai slab ca precizie, iar metodele de msurare GPS nu sunt att de pretentioase.
Trebuie remarcat c nu toate statiile totale pot fi utilizate pentru realizarea retelelor geodezice, la
fel si receptoarele GPS. Fiecare aparat are trecut n prospect precizia de msurare, distantele la care pot
fi folosite, timpul de sationare pentru a obtine o anumit precizie, etc.
Astfel, putem face o clasificare a retelelor geodezice din dou puncte de vedere:
- functie de aparatura utilizat;
- functie de scop.
5.1.1 Clasificarea retelelor geodezice functie de aparatura utilizat.
Aparatura utilizat la realizarea retelelor geodezice de sprijin a avut n ultimii 20 de ani o
ascensiune spectaculoas. Dac la nceputul anilor 80 vorbeam de teodolit combinat cu un aparat
electronic sau electrooptic de msurat distante, azi vorbim de statiile totale capabile s calculeze n teren
toate elementele definitorii pentru a obtine coordonate ntr-un anumit sistem de proiectie (atentie la
formulele utilizate pentru reducerea distantei la planul de proiectie dorit!) si, cu utilizarea de coduri,
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.81
chiar s poat realiza planuri topografice pe loc. De asemenea vorbim de tehnologia GPS care poate
furniza coordonate necesare ridicrilor topografice n zone n care reteaua geodezic a disprut sau nu
este suficient de dens pentru necesittile lucrrilor de executat.
Retelele astfel realizate sunt legate la sistemul de coordonate Stereografic 1970, la alte sisteme
utilizate (Gauss Kruger, UTM, local minier, local pentru localitti, etc.) sau devin sisteme locale.
5.1.1.1. Realizarea retelelor geodezice utiliznd teodolite de mare precizie (Theo 010, Wild T2,
Wild T3, etc). Desigur, aceast combinatie nu mai este utilizat de foarte mult timp, dar a fost utilizat o
perioad att de ndelungat nct trebuie mentionat. n acest tip de retea este necesar msurarea cel
putin a unei distante pentru stabilirea scrii (a planului de proiectie). Aceast operatie se realiza ( asa
cum s-a realizat si n reteaua geodezic national) cu ajutorul firului de invar. Desigur, operatiile de
determinare a directiilor orizontale ntr-o statie dura foarte mult. Numrul de serii era stabilit n functie
de precizia dorit pentru coordonatele finale. De asemenea, distantele determinate cu firul de invar
cereau dou echipe formate fiecare din cel putin patru persoane si pe o durat de luni de zile.
Punctele sunt semnalizate sau sunt stationate cu trepiezi si mirete.Precizia final a coordonatelor
nu era foarte bun pentru retelele mari ca ntindere (reteaua geodezic a Romniei), dar pentru retele cu
ntindere mic si cu foarte multe msurtori, precizia devine acceptabil. Sigur, n prezent costurile
realizrii unei retele geodezice cu asemenea tip de aparatur nu se mai justific.
5.1.1.2. Realizarea retelelor geodezice utiliznd statii totale. Este cea mai utilizat metod
pentru realizarea retelelor geodezice de mic ntindere. Se msoar toate directiile posibile. Numrul de
serii pentru directiile orizontale este ales functie de precizia final a retelei, dar se tine cont c se
msoar toate distantele posibile dus ntors ntre dou puncte ale retelei si aceasta mreste considerabil
precizia. Ponderea unei distante msurat corect este de cteva ori mai mare dect ponderea unei
directii. Pentru a efectua msurtori ct mai corect, trebuie ca punctele vizate s fie semnalizate sau
stationate cu trepied si tint de vizare. n cazul retelelor geodezice la care nu este nevoie de precizie
foarte mare se poate viza si pe un jalon care corespunde tehnic (vertical si cu nivela verificat).
Desigur, precizia final depinde nu numai de numrul seriilor efectuate sau de faptul c s-au
msurat toate distantele dus ntors ci si de precizia statiei totale utilizate. Dac precizia este de 30
cc
,
atunci se poate obtine o eroare pe coordonat conform formulei:
, ) , ) D 30 tg e
cc
= (5.1)
n care:
- e este precizia coordonatei;
- D este distanta n metri dintre dou puncte ale retelei.
De exemplu, la o precizie de 30
cc
a statiei totale, eroarea aferent pe coordonat la o distant de
1 kilometru este de 4.7 centimetri, fr a mai aduga erorile datorit punctrii, msurrii distantei, etc.
Este doar eroarea aferent preciziei statiei totale pe directie.
Trebuie amintit aici c pot apare erori sistematice datorit utilizrii defectuoase a statiei totale
sau a modificrii unor parametri n programul intern al statiei totale. Cea mai periculoas eroare este
legat de constanta prismei. Fiecare statie total are niste prisme ale ei. Constructorul a introdus n
programul de msurare aceast constant. n cazul utilizrii unor seturi de prisme care nu au aceeasi
constant, distantele sunt eronate. n acest caz statia total trebuie setat din program pentru schimbarea
constantei prismei. De asemenea, dac se modific din greseal constanta prismei n programul statiei
totale, toate distantele vor fi eronate. Din acest motiv este necesar ca zilnic s se msoare o distant
cunoscut cu statiile totale din dotare si cu seturile de prisme utilizate pentru a verifica constanta
prismei. Nu este obligatoriu, dar dac se determin si un unghi ca diferent a dou directii (obligatoriu
media celor dou pozitii) este un control al directiilor.
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.82
5.1.1.3. Realizarea retelelor geodezice folosind receptoare GPS. Este utilizat atunci cnd
reteaua geodezic se ntinde pe suprafete foarte mari si statiile totale nu sunt eficiente. Este cazul
retelelor geodezice utilizate pe un teritoriu administrativ foarte mare (tar, regiune, judet) sau la
determinarea miscrilor crustale. Asa cum a fost mentionat mai sus, n asemenea cazuri se impun
precautii de exceptie. Este nevoie de materializri speciale, borne de adncime n care se poate
introduce fortat receptorul. Conditia foarte important este aceea de a avea cerul liber deasupra
punctului. Timpul de stationare este direct proportional cu distanta dintre receptoare. De asemenea,
trebuie un numr ct mai mare de sateliti vizibili pentru a avea un rezultat ct mai bun al coordonatelor
finale (Capitolul 1). Punctele nu este obligatoriu s fie semnalizate pentru a nu perturba semnalul de la
sateliti.
5.1.1.4. Realizarea retelelor geodezice utiliznd statii totale si receptoare GPS. n acest caz
reteaua este de mici dimensiuni. Numrul punctelor stationate cu receptoare GPS si cu statii totale este
ales functie de conditiile de vizibilitate, relief, obstacole, pret al lucrrii, etc. Ideal este ca toate punctele
s fie stationate si cu receptoare GPS si cu statii totale. Necesare sunt ct mai multe msurtori si ct
mai variate pentru a avea ct mai multe ecuatii n raport de numrul necunoscutelor.
5.1.2 Clasificarea retelelor geodezice functie de scop.
O retea geodezic serveste mai multor scopuri, asa cum a fost mentionat mai sus. Astfel, avem
retele geodezice care servesc la determinarea geoidului, miscri crustale, ntocmirii hrtii de baz,
lucrrilor topografice curente, cadastrului, lucrrilor ingineresti de interes local (miniere, hidrotehnice,
urbane, etc). n functie de aceste scopuri, se poate alge aparatura adecvat.
5.2 Metode de msurare GPS.
Ne vom referi n acest subcapitol doar la receptoarele care nu au ncorporate sistemul de
transmitere al informatiilor prin unde radio. Aceste receptoare au modul lor specific de determinare al
coordonatelor si vor fi tratate separat.
n principiu sunt dou criterii dup care sunt clasificate msurtorile GPS:
- dup numrul de receptoare;
- dup pozitia, tipul receptoarelor si timpul de stationare.
5.2.1 n functie de numrul aparatelor, din literatura de specialitate rezult urmtoarele
metode principale de msurare GPS:
- single point (cu un singur receptor);
- cu mai multe receptoare.
5.2.1.1. Metoda single point. Metoda single point nu este utilizat n msurtorile geodezice
pentru determinarea coordonatelor deoarece nu asigur precizia necesar. Este o metod simpl, de
determinare a coordonatelor aproximative n sistem WGS 84. n punctul cruia dorim s-i determinm
coordonatele, se amplaseaz un receptor GPS. Acesta trebuie s fie de clas geodezic n cazul
determinrilor mai precise. Receptorul este deschis si primeste semnal de la satelit. El va fi lsat s
functioneze o perioad de timp, mai ndelungat sau mai scurt. n mod normal, cu ct perioada de
stationare pe punct este mai mare, cu att precizia de determinare n sistem WGS 84 n sistem absolut
va fi mai bun. n prezent, chiar dac timpul de stationare este mai mic, dar geometria satelitilor este
bun, precizia de determinare a coordonatelor n sistem WGS 84 absolut va fi mai bun.
Pentru a ntelege mai bine fenomenul determinrii coordonatelor n sistem sistem single point
putem face o analogie cu topografia clasic. S presupunem c trebuie efectuat o ridicare topografic
ntr-o zon izolat, departe de reteaua geodezic si fr pretentii (nu necesit aviz de la Oficiile de
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.83
Cadastru). Se efectueaz ridicarea topografic folosind coordonate de plecare ale unei statii citite de pe
plan si o orientare spre un punct vizibil: colt de cas, vrf de munte, etc, ale crui coordonate sunt de
asemenea extrase de pe plan. n acest mod se obtine un plan topografic n sistem de coordonate
Stereografic 1970. Coordonatele determinate astfel pentru ridicare sunt n sistem de coordonate
Stereografic 1970, dar nu ncadrate perfect n sistem absolut. Precizia absolut depinde de scara
planului de pe care s-au extras coordonatele. n sistem relativ, respectiv distant si orientare, punctele
ridicrii rspund perfect. Dac legm ridicarea la sistemul Stereografic 1970 absolut printr-o
retrointersectie simpl sau alt metod, vom constata o diferent de coorodonate pe punctele comune de
centimetri, decimetri, metri sau zeci de metri. Aceast diferent este functie de scara planului de pe care
am extras coordonatele. Cu ct scara este mai mare, cu att precizia punctelor n sistem Stereografic
1970 absolut este mai mare.
Aceleasi tip de diferente se vor observa si n cazul determinrii coordonatelor unui punct n
sistem single point si legarea lui apoi n sistem WGS 84 absolut. La metode de calcul a coordonatelor si
a transcalculului de coordonate se va insista pe metoda de determinare single point si a avantajelor pe
care le poate aduce n anumite cazuri.
5.2.1.2. Metoda cu mai multe receptoare. Este utilizat frecvent n lucrrile geodezice curente.
Este suficient s existe minim dou receptoare GPS care s receptioneze semnal de la aceiasi minim 4
sateliti vizibili si s aib un timp comun de stationare. Astfel, unul din cele dou receptoare devine
punct cu coordonate cunoscute si determin prin calcul coordonatele celuilalt. Numrul de dou
receptoare este minim, asa cum pentru intersectia nainte sunt suficiente minim dou puncte cu
coordonate cunoscute din care se vizeaz punctul nou. n mod frecvent se utilizeaz minim trei
receptoare GPS. Cu ct numrul receptoarelor este mai mare, cu att mai mult creste siguranta
determinrilor. Trebuie tinut cont de faptul c n prezent exist multe statii GPS permanente care pot fi
integrate n reteaua nou, n acest caz numrul receptoarelor crescnd cu numrul statiilor permanente
existente. Statiile permanente de utilizat trebuie s fie amplasate n asa fel nct s poat fi folosite la
calcule (distant proportional cu timpul de stationare).
5.2.2. Dup pozitia, tipul receptoarelor si timpul de stationare, msurtorile GPS pot fi:
- statice;
- stop and go (rapid static).
Dup cum a fost prezentat n Capitolul 2, receptoarele GPS sunt de mai multe tipuri. Metodele
descrise n subcapitolul 5.2.2. se preteaz pentru aparatur care nu are ncorporat sistemul de
transmitere radio a informatiilor ntre receptoare.
5.2.2.1. Metoda static este cea mai utilizat atunci cnd se vorbeste de realizarea retelelor
geodezice care necesit precizii foarte mari. De asemenea, atunci cnd receptoarele GPS nu sunt de
clas geodezic si este nevoie de precizii mai bune.
Metoda static presupune existenta a minim dou receptoare GPS amplasate pe dou puncte
materializate pe teren. Cele dou receptoare primesc semnal de la aceiasi mimin 4 sateliti si au timpul
de stationare comun. Distanta dintre cele dou receptoare trebuie s fie minim de 2 metri. Maximul de
distant este legat de vizibilitatea celor patru sateliti comuni. Cu ct distanta este mai mare, cu att
timpul de stationare este mai mare. Dup cum a fost prezentat mai sus, acest minim de 4 sateliti nu este
suficient pentru determinarea unui punct cu o precizie suficient. De asemenea, pentru obtinerea unui
randament mai bun si a unor precizii mai bune, numrul receptoarelor este mai mare, la care se pot
aduga si statiile permanente.
Cazul n care se msoar cu dou receptoare. n principiu, unul din receptoare este amplasat pe
un punct, iar cellalt receptor stationeaz o perioad de timp pe fiecare din celelalte puncte (Figura 5.1).
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.84
De exemplu, statia fix (cea care rmne pe punct) este amplasat pe punctul de coordonate cunoscute,
A. Cellalt receptor stationeaz punctele noi, E, F, Gsi H, apoi cel putin un punct vechi (B, C, sau D).
n acest caz avem o singur determinare pentru punctele noi. Conform normelor n vigoare, fiecare punt
nou trebuie s aib cel putin patru vectori de pozitie (determinri). Pentru acesta avem dou variante:
- Stationarea cu receptorul fix si pe punctele vechi B, Csi Dsi determinarea celorlalte puncte
noi. Astfel, vom avea patru determinri independente pentru fiecare punct nou, caz n care se
poate aplica metoda celor mai mici ptrate.
- Determinri cu statia total ntre fiecare dou puncte vizibile, integrnd msurtorile de
directii si distante cu msurtorile GPS ntr-un singur model de prelucrare prin metoda celor
mai mici ptrate.
Fig. 5.1.
Nu este obligatoriu ca statia fix s fie amplasat pe un punct cu coordonate cunoscute (figura
5.2). De exemplu, se poate stationa punctul H, punct nou. n acest caz, receptorul mobil se stationeaz
pe cel putin un punct vechi si pe toate punctele noi. Dac s-a stationat punctul vechi A, se determin n
prim faz coordonatele punctului nu H din coordonatele punctului A. Din coordonatele punctului H se
determin apoi si coordonatele celorlalte puncte noi: E, F si G. Procedeul se repet apoi cu stationare tot
pe un punct nou sau pe un punct vechi, sau cu determinri cu statia total. n final, fiecare punct nou
trebuie s aib cel putin patru vectori de determinare.
Fig. 5.2.
G
F
H
E
A
B
D
C
G
F
H
E
A
B
D
C
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.85
Cazul n care se msoar cu trei receptoare. n acest caz, exist mai multe variante:
1. stationarea receptorului care rmne fix pe un punct cunoscut iar celelalte dou se amplaseaz
pe punctele de determinat si pentru verificare (figura 5.3);
2. stationarea a dou receptoare fixe pe dou puncte de coordonate cunoscute, iar unul din
receptoare, mobil, se deplaseaz pe fiecare punct nou (figura 5.4);
3. stationarea receptorului fix pe oricare din punctele noi, celelalte dou stationnd cel putin un
punct cu coordonate cunoscute si toate punctele noi (figura 5.5);
4. stationarea a dou receptoare fixe pe puncte noi, cellalt receptor stationnd pe rnd toate
punctele noi si cel putin un punct cu coordonate cunoscute (figura 5.6);
5. stationarea a dou receptoare fixe unul pe un punct nou, unul pe un punct cu coordonate
cunoscute, cellalt receptor stationnd pe rnd celelalte puncte noi (figura 5.7).
Fig. 5.3.
Fig. 5.4.
G
F
H
E
A
B
D
C
G
F
H
E
A
B
D
C
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.86
Fig. 5.5.
Fig. 5.6.
G
F
H
E
A
B
D
C
G
F
H
E
A
B
D
C
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.87
Fig. 5.7.
1. Din figura 5.3 se observ c stationnd punctul cu coordonate cunoscute A, iar cele dou
receptoare sunt amplasate pe punctele noi Esi H, avem simultan determinarea coordonatelor punctelor
E si H, dar si un vector de determinare ntre punctele E si H. Tot din punctul A se pot determina apoi
punctele noi G si F, dar si vectorul de control ntre G si H. Se pot stationa apoi punctele B, C si D cu
coordonate cunoscute pentru determinarea punctelor noi. Trebuie ndeplinit conditia ca n fiecare punct
nou s existe minim patru vectori. Acesti vectori pot fi dati de msurtorile GPS sau de statiile totale.
2. Se stationeaz receptoarele GPS fixe n punctele cu coordonate conoscute A si B. Se
determin simultan din aceste dou puncte, coordonatele punctelor noi: E, F, Gsi H prin dubl radiere.
Dac se stationeaz apoi punctele Csi D care au de asemenea coordonate cunoscute, punctele noi E, F,
G si H vor avea patru determinri independente. Astfel este ndeplinit cerinta normativelor de a avea
patru vectori independenti pentru fiecare punct nou determinat. De asemenea, se verific ncadrarea
punctelor vechi prin vectorii AB si CD. Va rezulta o diferent de distant si de coordonate.
3. Se stationeaz cu receptorul GPS fix punctul nou E. Celelalte dou receptoare se amplaseaz
n punctele A de coordonate cunoscute si punctul nou H. Astfel se determin coordonatele punctului
nou E din A si ale punctului nou H tot din punctul A. De asemenea se determin vectorul dintre
punctele E si H. Se pot stationa apoi cu receptoarele mobile punctele noi F si G. Astfel, din
coordonatele punctului nou determinat E, se vor determina coordoantele punctelor noi Fsi Gsi vectorul
dintre punctele F si G. Receptorul fix se poate amplasa pe oricare alt punct nou sau vechi, important
este ca fiecare punct s ndeplineasc conditiile de determinare.
4. Se pot stationa cu receptoarele GPS fixe punctele E si H. Receptorul mobil stationeaz
punctele A, F, G, eventual si un alt punct cu coordoante cunoscute, B. Se determin astfel coordonatele
punctelor noi E si H direct din punctele cu coordonate cunoscute Asi B. De asemenea se determin si
coordonatele punctelor noi F si G. Receptoarele fixe se pot muta n punctele noi F si G, receptorul
mobil fiind mutat pe rnd n punctele cu coordonate cunoscute C si Dsi n punctele noi E si H. Se pot
completa msurtorile cu statia total. Rezultatul trebuie s corespund att cerintelor normativelor, dar
si ca precizie de determinare.
5. Un receptor fix este amplasat pe un punct cu coordonate cunoscute (A), iar cellalt receptor
fix pe un punct nou (H). Receptorul mobil se deplaseaz n punctele E, F, Gsi eventual pe punctele B,
C si D. Dup ncheierea primului set de msurtori se stationeaz din nou un punct cu coordonate
cunoscute (C) si punctul nou (F). Procedeul se repet. Binenteles c nu este obligatoriu s se respecte
modul de amplsare al receptoarelor expus aici. Se pot face combinatii din punctele 1, 2, 3 si 5.
G
F
H
E
A
B
D
C
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.88
Important este ca fiecare punct s fie determinat corect si din sficiente puncte, cu sufieciente legturi.
Aceasta se poate rezolva si utiliznd statia total intercalat unitar cu determinrile GPS.
Cazul n care se msoar cumai mult de trei receptoare. Cu ct sunt mai multe receptoare cu
att se detrmin mai corect si mai precis coordonatele punctelor noi. n cazul a 8 puncte, patru puncte cu
coordonate cunoscute si patru puncte noi, cu opt receptoare se vor determina un numr de 28 vectori,
respectiv combinatii de opt puncte luate cte dou. Se msoar astfel toate combinatiile posibile. Atunci
cnd se efectueaz si msurtori de directii si distante, numrul de msurtori suplimentare este foarte
mare, iar coordonatele finale ale punctelor noi vor avea precizii foarte bune.
5.2.2.2. Metoda stop and go. Este utilizat atunci cnd se doreste o determinare rapid a
coordonatelor, dar cu o precizie mai mare. Timpul de stationare este minim, programul de prelucrare al
datelor este diferit fat de metoda static. n prezent, cnd metoda determinrii coordonatelor prin
metoda LRK, RTK (direct prin utilizarea undelor radio), aceast metod este mai putin utilizat si doar
cu aparatura care nu are ncorporat tehnologia determinrii directe cu ajutorul undelor radio. Metoda
static este cea mai utilizat atunci cnd se vorbeste de realizarea retelelor geodezice care necesit
precizii foarte mari. De asemenea, atunci cnd receptoarele GPS nu sunt de clas geodezic si este
nevoie de precizii mai bune.
5.3 Prezentare general a tehnologiei GPS cu transmiterea datelor prin unde radio UHF
(real-time = timp real)
5.3.1 Principiu
Principiul sistemului GPS diferential const n observarea erorilor de msurare a
pseudodistantelor privind fiecare satelit observabil ntr-un punct de referint a crui pozitie este
cunoscut cu precizie n sistemul WGS84. Observarea acestor erori permite stabilirea corectiilor care
sunt radio-difuzate, asa nct de ele s beneficieze utilizatorii (statiile mobile) care evolueaz n zona de
interes din jurul statiei de referint. Cele mai performante sisteme de transmitere a corectiilor prin radio,
la ora actual, permit ca aceste corectii s fie transmise pn la distante de 45-50 km fat de statia de
referint, n conditii bune de propagare a undelor radio. Aceast distant poate fi depsit cu ajutorul
utilizrii sistemului de telefonie mobil pe post de transmisie a corectiilor. Problema care apare este
legat de faptul c att statia fix, care transmite corectiile ct si statia mobil, trebuie s vad aceeaiasi
minim patru sateliti. Din acest motiv, distanta ntre cele dou receptoare nu poate fi mrit foarte mult.
Cauzele principale ale erorilor de msurtoare n sistemul GPS sunt:
- - erorile privind estimarea intervalelor de timp pentru propagarea datelor GPS;
- - erorile legate de informatiile transmise prin satelit privind:
- - ceasul satelitului;
- - datele orbitale;
- - erorile voluntare provocate prin degradarea voluntar a sistemului GPS, urmrind s
diminueze performantele sistemului pentru utilizatorii care nu au acces la serviciul de
pozitionare precis; metodele diferentiale (statie de referint + statie mobil) asigur si
corectarea acestor erori voluntare;
Toate aceste erori sunt corelate pe toat suprafata zonei de interes si sunt corectate prin acest
sistem diferential cu transmiterea datelor prin unde radio UHF.
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.89
Geostationary
Host
T
e
l
e
m
e
t
r
y
R
e
m
o
t
e
C
o
n
t
r
o
l
Geostationary satellite
control centre
N
a
v
i
g
a
t
i
o
n
a
n
d
M
o
n
i
t
o
r
i
n
g
Processing
and Mission
Centre
GPS constellation
Monitoring stations
ROV.
REF.
Receiver
with integrated real-time processing
(KART and LRK)
SCORPIO 6002 SK
Receiver
with integrated real-time processing
(KART and LRK)
6002 MK SCORPIO
UHF data link
(corrections generated at the REF. station)
Fig. 5.8. - Transmiterea datelor prin unde radio UHF
Transmiterea corectiilor ctre utilizatori trebuie s se fac, n cazul unui sistem timp real,
printr-o asemenea modalitate nct:
- - s acopere ntreaga zon de interes;
- - s asigure o fiabilitate a transmisiei compatibil cu calitatea necesar;
Frecventele utilizate la transmitere corectiilor n cazul statiilor de referint Scorpio 6001 SK sau
6002 SK (firma DSNP Thomson) sunt de 410 - 470 Mhz.
5.3.2 Calculul corectiilor la statia de referint si receptia acestora la statia mobil
Calculul corectiilor se face printr-un modul receptor, echipat cu 12/16 canale paralele de
receptie, permitnd s se calculeze simultan corectiile de la 12/16 sateliti .
Modulul receptor calculeaz pentru fiecare satelit:
- - diferenta dintre distanta msurat si distanta teoretic obtinut pornind de la datele
efemeridelor si de la pozitia cunoscut a antenei GPS de la statia de referint;
- - viteza evolutiei corectiei;
Corectiile sunt calculate la fiecare 0,6 secunde pentru toti satelitii si sunt transmise la unitatea
central care gestioneaz emisia pe suportul UHF.
Un mesaj de corectie transmis la unitatea central de ctre modulul receptorului GPS cuprinde:
- numrul sptmnii;
- contorul Z, care permite s se dateze cu precizie fiecare corectie n scara de timp GPS;
- pentru fiecare satelit:
- indicarea schimbrii efemeridelor;
- corectia observat (maxim 9.999.999 milimetri);
- viteza evolutiei corectiei (maxin 999 mm/s);
- numrul satelitului (SV. 0-31);
- corectia ionosferic calculat la statia de referint (centimetri);
- corectia troposferic calculat la statia de referint (centimetri);
Frecventa de emisie poate fi programat prin pasi de 12,5 kHz, ntr-o band de 4MHz n raport
cu frecventa nominal a statiei.
Mesajul de corectie, care poate contine corectii pentru maxim 12 / 16 sateliti, este primit printr-
un receptor UHF, care transmite corectiile receptorului GPS al mobilului unde ele sunt decodate printr-
un modem. Receptorul GPS al mobilului aplic corectiile diferentiale msurtorilor sale proprii de
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.90
pseudo-distante, pentru fiecare satelit astfel:
t t t
PRC PRM PR = (5.2)
unde:
- PR
t
= pseudodistanta corijat la timpul t;
- PRM
t
= pseudodistanta msurat de receptorul mobilului;
- PRC
t
= corectia pseudodistantei transmis de statia de referint;
Erorile ionosferic si troposferic, calculate de statia de referint, sunt incluse n termenul PRC
t
5.4 Modul de lucru
5.4.1 Consideratii generale.
Un receptor GPS msoar faza semnalului emis de sateliti cu precizie milimetric. Semnalul
transmis de sateliti n drumul su ctre Pmnt la trecerea prin atmosfer este afectat de ctre ionosfer
si troposfer. Distorsiunile si turbulentele produc degradri majore ale preciziei observatiilor.
Msurtorile GPS statice si rapid statice se bazeaz pe metoda diferential. Astfel o baz este observat
si calculat ntre dou receptoare. Atunci cnd ambele receptoare GPS observ simultan aceeasi sateliti
majoritatea efectelor atmosferei n degradarea semnalului sunt eliminate. Cu ct baza este mai scurt cu
att precizia cu care este msurat va fi mai mare, presupunndu-se c atmosfera prin care trece
semnalul ctre cele dou receptoare este aceeasi. Este foarte important n cazul metodei rapid static ca
bazele s fie scurte pentru a putea presupune c distorsiunile ionosferice sunt aceleasi la ambele capete
ale bazei. n consecint este de preferat, att din punctul de vedere al preciziei ct si al timpului de
msurare, s se msoare baze scurte (pna la 5-6km) fat de puncte de referint temporare dect s se
msoare baze lungi (15-20km) fat de un singur punct central. n toate tipurile de msurtori este
important controlul acestora utiliznd msurtori independente. n special atunci cnd utilizm metoda
rapid static dac timpul de observare este prea scurt, GDOP are valori mari, sau distorsiunile ionosferice
sunt foarte mari, este posibil ca la post procesare programul s rezolve ambiguittile dar rezultatele s
depseasc tolerantele stabilite pentru proiectul respectiv. Pentru controale independente se recomand:
- Ocuparea fiecrui punct a doua oar la o alt or dect n prima sesiune;
- nchiderea determinrii punctelor msurarea bazei ntre ultimul si primul punct n cazul
procedurii stop & go;
- Msurarea bazelor independente ntre punctele retelei;
- Utilizarea a dou statii de referint;
- Fiecare punct nou determinat s aib minim doi vectori independenti de determinare.
n general cu ct baza este mai lung cu att timpul de stationare va fi mai mare. Noaptea
influentele datorate ionosferei sunt considerabil reduse, astfel c n cazul metodei rapid static timpul de
stationare poate fi practic njumttit, obtinndu-se aceleasi rezultate. Pentru baze de pn la 20km se
poate ncerca rezolvarea ambiguittilor considerndu-se un singur model ionosferic pentru ambele
capete ale bazei. Pentru baze de peste 20km nu este recomandabil s se ncerce rezolvarea
ambiguittilor. n acest caz se utilizeaz un alt algoritm care elimin n mare msur influentele
ionosferei dar nu mai ncearc rezolvarea ambiguittilor.
Atunci cnd planificm sesiunile este recomandabil s utilizm intervalele de timp n care
valoarea GDOP este ct mai mic. Deoarece datorit multor factori mai mult sau mai putin previzibili
este imposibil s planificm sesiunile la minut este de preferat ca mai bine s msurm cu un punct mai
putin dect s reducem timpul de observare n celelalte puncte.
Coordonatele obtinute din msurtorile GPS sunt bazate pe elipsoidul WGS84. Pentru a putea
permite transformarea lor n coordonate locale este necesar ca punctele cu coordonate locale cunoscute
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.91
s fie incluse n reteaua msurat cu receptoarele GPS. Aceste puncte trebuie s fie uniform distribuite
pe suprafata acoperit de retea. Pentru o corect calculare a parametrilor de transformare trebuie s fie
utilizate cel putin trei puncte plus un punct de control (preferabil cinci sau mai multe).
Trebuie tinut cont de statiile permanente din zon, care au un rol foarte important acolo unde
exist si pot suplini punctele de coordoante cunoscute. Ele pot fi utilizate si la transcalcul.
5.4.2 Planificarea sesiunilor.
Valoarea GDOP ne ajut s analizm influenta geometriei satelitilor disponibili deasupra zonei
de lucru. Pentru metoda rapid static aceast valoare trebuie s fie mai mic de 8, dar este recomandabil
s alegem sesiunile n perioadele cnd nu depseste valoarea 6. n principiu este bine s proiectm
sesiunile de lucru n perioadele cnd sunt vizibili minimum 5 sateliti cu o elevatie de peste 15, iar
valoarea GDOP este mai mic de 6 att
pentru statia de referint ct si pentru
statia mobil. Dac stim c n zona de
lucru exist obstructii majore, o
recunoastere prealabil urmat de o
simulare a obstructiilor n programul de
planificare va conduce la obtinerea
unor rezultate deosebit de bune.
Figura 5.9 Planificarea sesiunilor
5.4.3 Durata sesiunii si lungimea bazei.
Durata unei sesiuni, pentru obtinerea unui rezultat bun la post procesare, depinde de mai multi
factori: lungimea bazei, numrul satelitilor observati, valoarea GDOP, perturbrile ionosferice.
Deoarece perturbrile datorate atmosferei sunt mult mai mici noaptea este avantajos, dac este posibil,
ca msurarea bazelor lungi (20-30km) s se fac n aceast perioad. Este recomandabil mrirea
duratei sesiunii dac doi din patru sau cinci sateliti observati au elevatia mai mic de 20. Urmtoarele
valori sunt orientative:
Metoda
Numr sateliti
GDOP<8
Lungime Sesiune zi Sesiune noapte
Rapid static
Minim 4
Minim 4
Minim 5
Pn la 5 km
ntre 5 si 10 km
ntre 10 si 15 km
5 10 minute
10 20 minute
Peste 20 minute
5 minute
5 10 minute
10 20 minute
Static
Minim 4
Minim 4
ntre 15 si 30 km
Peste 30 km
1 2 ore
2 3 ore
O or
2 ore
Din experienta acumulat n mai multi ani de msurtori GPS, se poate enunta, empiric, o
Regul de aur n baza careia se poate stabili durata unei sesiuni de masuratori, in conditii optime, in
functie de lungimea bazei masurate cu un receptor GPS cu dubla frecventa atunci cand se utilizeaza
metoda Rapid-Static cu inregistrare la 5 secunde. Aceasta este: Durata este egal cu 1 min. pentru
fiecare km. din lungimea bazei msurate, dar nu mai putin de 5 min.
5.4.4 Observatiile de teren.
La alegerea amplasamentului statiei de referint trebuie s se tin cont de mai multe criterii.
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.92
Orizontul s nu fie obstructionat la o elevatie mai mare de 15. S nu existe n apropiere suprafete
reflectante care s genereze efectul multipath. S nu se afle n apropierea zonelor cu trafic intens si dac
este posibil s se aleag locatii sigure unde s nu fie necesar s se lase un paznic. S nu se afle n
apropierea releelor, a liniilor de nalt tensiune, sau a cilor ferate electrificate. Deasemenea statia de
referint trebuie s ndeplineasc si anumite conditii tehnice. Acumulatorii s fie complet ncrcati, s
se asigure conectarea unei a doua baterii sau s se utilizeze conectarea extern la un acumulator auto sau
printr-un transformator la reteaua de energie electric prin intermediul unui UPS. Memoria trebuie s
aib o capacitate suficient pentru ntreaga durat a sesiunii. Verificati de dou ori nltimea antenei si
offset-ul acesteia dac este necesar. Verificati dac parametrii configurati sunt corecti si se potrivesc cu
parametrii statiilor mobile.
Figura 5.10 Observatii de teren
Statia de referint nu trebuie instalat n mod obligatoriu ntr-un punct cu coordonate cunoscute.
Este de preferat ca ea s fie amplasat ntr-un punct care ndeplineste conditiile enumerate dect s fie
pus ntr-un punct cunoscut dar care nu ndeplineste aceste conditii. Pentru calcularea parametrilor de
transformare punctele de coordonate cunoscute trebuie incluse n reteaua GPS. Aceste puncte pot fi
stationate cu statiile mobile si nu este obligatoriu ca ele s fie utilizate ca amplasamente pentru statiile
de referint.
Pentru a evita ca rezultatele s fie influentate de erori sistematice, coordonatele WGS84 ale
punctului de referint trebuie cunoscute cu o precizie de 10 m. Dac acest punct va fi determinat prin
metoda Single Point Position (SPP) atunci este necesar ca timpul de stationare n punct s fie de
minimum 2-3 ore, receptionnd cel putin 4 sateliti si avnd o valoare mic a GDOP. Cu ct timpul de
stationare este mai mare cu att pozitia obtinut prin SPP va fi mai precis.
Operatorul statiei mobile trebuie s asigure si s verifice ndeplinirea mai multor conditii.
Parametrii configurati n receptor s fie corecti si s se potriveasc cu parametrii statiei de referint.
nltimea antenei s fie corect msurat. Pentru sesiunile scurte s se urmreasc permanent valoarea
GDOP si s se mreasc timpul de stationare n cazul cnd acesta are valori ridicate sau, dac a depsit
valoarea 8, s se ntrerup sesiunea si s se reia atunci cnd GDOP a sczut la valoarea optim. S evite
amplasarea punctelor noi n zone cu obstructii cu elevatie mai mare de 15, n apropierea suprafetelor
reflectante, sau n apropierea statiilor de emisie, sub liniile de nalt tensiune, sau lng cile ferate
electrificate. Deasemenea se va evita stationarea sub vegetatie deas mai ales pe vreme umed. Se va
verifica periodic starea de ncrcare a bateriei (este bine s existe o baterie de rezerv) si rezerva de
CURS GEODEZIE SATELITARA
Capitolul 5. Metode de msurare GPS pag.93
capacitate a memoriei. Cu titlu informativ se poate utiliza indicatorul Stop & Go. Este recomandabil ca
pentru fiecare punct nou stationat s se ntocmeasc o fisa care s cuprind datele punctului, descrierea
si o schit.
GPS FORMULAR TEREN
Denumire punct: Data:
Tip receptor / anten: Operator:
Modul de stationare: Baston
Trepied
Pilastru
nltimea antenei:
Pornire Ora: Oprire Ora:
Numr de epoci:
Numr de sateliti:
GDOP:
DESCRIERE:
SCHIT:
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.94
6. PRELUCRAREA OBSERVATIILOR GPS
Prelucrarea datelor GPS se realizeaz n functie de metoda de msurare, de sistemul de
coordonate utilizat (Stereografic 1970 sau EUREF), de tipul msurtorilor efectuate n retea, de metoda
de prelucrare aleas.
Este de mentionat un amnunt foarte important: receptoarele GPS prelucreaz semnalul de la
satelit si dau pozitia receptorului n coordonate sistem global elipsoidal pe elipsoidul WGS84. n
Romnia, sistemul de coordonate oficial este sistemul de coordonate plane Stereografic 1970 care are ca
baz elipsoidul Krasovski. Pentru a obtine coordonate din sistemul WGS84 n sistemul Stereografic
1970 sunt dou ci, amndou utiliznd niste parametri de transcalcul, respectiv parametri utilizabili pe
toat tara si parametri utilizabili local (Capitolul 7). Modalitatea de transcalcul este aleas de utilizator.
Trebuie specificat c de foarte multe ori coordonatele obtinute de utilizatori n sistem de coordonate
Stereografic 1970 nu corespund, sau, dac sunt verificate pe puncte cu coordonate deja cunoscute nu se
suprapun n toleranta cerut. Motivul acestor discordante l constituie n principal modul de calcul al
coordonatelor. Sigur c si msurtorile n sine pot fi afectate de anumite erori (Capitolul 1), dar n
marea majoritate de vin sunt prelucrrile, respectiv transcalulul. Cei mai multi utilizatori acuz reteaua
n sistem Stereografic 1970, dar nu au dreptate. Am efectuat msurtori GPS n toat tara si, efectund
transcalculul de coordonate ntre puncte amplasate n zone foarte deprtate (Satu Mare, Oradea, Arad,
Timisoara, Caransebes, Craiova, Bucuresti, Constanta, Tulcea, Bacu, Iasi, Suceava, Baia Mare, Cluj,
Trgu Mures, Sibiu), eroarea cea mai mare a fost de circa 40 centimetri (ntre Constanta si Satu
Mare). Aceasta demonstreaz fr dubiu c reteaua msurat n anii `50 - `60 are o precizie foarte bun
si este unitar. Sigur, pot exista puncte deplasate (n zone miniere), sau confundate (puncte noi puse
lng altele vechi la refaceri de retea), miscri ale plcilor crustale, dar reteaua de baz rmne. Ceea ce
se poate pune n discutie este faptul c o constrngere a retelei realizate cu receptoare GPS pe reteaua
geodezic veche nu face altceva dect s strice precizia superioar a retelei GPS. Aceasta ns nu poate
fi rezolvat dect de Agentia National de Cadastru si Publicitate Imobiliar, care prin Institut ar trebui
s realizeze reteaua geodezic prin metode moderne, cu o precizie net superioar. n acest caz
constrngerea ndesirilor realizate cu aparatur performant s-ar face pe puncte determinate cel putin la
fel de precis.
De asemenea, este foarte important de subliniat c reteaua geodezic nou creat poate fi legat
sau nu la reteaua EUREF (Capitolul 4). Dac nu este legat la reteaua EUREF, atunci nu poate fi
integrat n aceast retea. n cazul n care pe viitor se va trece oficial la aceast retea, aceste msurtori
nu vor putea fi integrate.
n principiu orice receptor GPS pornit, nregistreaz continuu semnalul de la satelitii vizibili.
Acest semnal este stocat n memoria receptorului la o anumit perioad, denumit epoc. O epoc poate
fi aleas de la 1 la 30. Dac se stationeaz pe punct o perioad mai scurt (cinci minute, zece minute),
durata unei epoci este aleas de obicei de 1. n cazul msurtorilor de durat (patru-cinci zile), o epoc
poate fi aleas la 30. Cu ct durata unei epoci este mai mic, cu att se ncarc memoria receptorului
mai repede.
Datele nregistrate sunt descrcate cu ajutorul programelor furnizate de productorul
receptoarelor. Momentele nregistrrilor sunt suprapuse pe datele colectate de la alte receptoare si se
aleg timpii comuni de nregistrare. Pentru punctele stationate n aceeasi perioad se pot calcula vectorii
relativi de pozitie: .X, .Y si .Z. Dac unul din aceste puncte este considerat punct cu coordonate
cunoscute, atunci celuilalt i se pot determina coordonatele absolute, provizorii. Avnd coordonatele
provizorii si mai multe determinri (din mai multe puncte vechi si noi), coordonatele finale rezult
utiliznd metoda celor mai mici ptrate, msurtori indirecte.
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.95
6.1 Determinarea coordonatelor punctelor n sistem WGS84.
Exist dou modalitti de determinare a coordonatelor n sistem WGS84: din navigatie si n
sistem absolut.
6.1.1 Determinarea coordonatelor din navigatie.
Metoda este aleas atunci cnd din anumite motive nu se poate face legtura la sistemul absolut.
Nu este recomandat, dar din nefericire n Romnia este foarte utilizat datorit necunoasterii punctelor
din reteaua EUREF si a faptului c la statiile permanente nu este acces direct pe Internet (cu exceptia
celei de la Facultatea de Geodezie).
n principiu, orice receptor GPS nregistreaz semnalul de la satelit. n perioada de stationare pe
un punct, receptorul are posibilitatea s si determine pozitia aproximativ pe care si-o mbuntteste
permanent. Cu ct stationarea pe punct este mai mare si geometria datelitilor mai bun, cu att pozitia
este mai aproape de valoarea absolut. Dac punctele stationate cu receptoare GPS nu au fost legate
direct la puncte cu coordonate absolute n sistem WGS84 (puncte din reteaua EUREF), atunci unul din
punctele stationate va fi calculat ca single point n sistem WGS84 . Acest punct devine punct cu
coordonate cunoscute si toate celelalte puncte sunt determinate din acesta. Dac ulterior se vor
determina coordonatele punctului de plecare n sistem absolut se vor vedea diferentele fat de cele
calculate ca single point. Practic, cum a fost spus mai sus, cu ct timpul de stationare pe punct este
mai mare si geometria satelitilor mai bun, cu att cele dou rnduri de coordonate vor fi mai apropiate.
Este la fel ca atunci cnd se realizeaz un plan topografic ntr-o zon n care reteaua n sistem
Stereografic 1970 este deficitar. Se poate pleca cu un punct determinat de pe un plan existent si cu o
orientare la un punct cunoscut (castel de ap, biseric, anten, etc). Planul topografic este realizat bine,
este n sistem Stereografic 1970, dar nu absolut. Dac ulterior punctul de la care s-a pornit cu ridicarea
este legat la sistemul Stereografic 1970 absolut, atunci se observ diferenta de coordonate. Cu ct scara
planului de pe care s-au determinat coordonatele a fost mai mare, cu att diferenta dintre cele dou
rnduri de coordonate este mai mic.
Pornind deci de la punctul determinat ca single point (punctul C), toate celelalte puncte se
determin n raport de acesta. ntre aceste puncte preciziile sunt foarte bune, dar n raport de WGS84
absolut se pstreaz aceleasi diferente ca si la punctul initial (Figura 6.1).
Figura 6.1 Determinri GPS single point
6.1.2 Determinarea coordonatelor n sistem absolut.
Pentru determinarea coordonatelor n sistem absolut este necesar ca cel putin un punct de
plecare s fie un punct al retelei EUREF (Capitolul 4) sau s aib determinarea confirmat de la un
punct al retelei EUREF. Desigur, dac se pleac de la un singur punct al retelei EUREF nu exist
G
F
H
E
A
B
D
C
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.96
controlul coordonatelor si o asemenea situatie nu este recomandat. Pentru control este nevoie de minim
dou puncte care s aib coordonate absolute n sistem WGS84. Aceste puncte pot fi n zona n care se
msoar sau pot fi n afara zonei de msurat (figura 6.2 a si b). Practic se stationeaz cu receptoarele
GPS toate punctele, att cele care au coordonate ct si cele crora trebuie s li se determine
coordonatele. Cu ct exist mai multe receptoare GPS cu att determinarea va dura mai putin. Un ajutor
important poate fi dat de statiile permanente. Acestea pot suplini att lipsa unui receptor ct si a unui
punct din reteaua EUREF (poate fi considerat punct ci coordonate cunoscute).
a)
b)
Figura 6.2 Legarea retelelor locale la reteua EUREF
din puncte cu coordonate cunoscute n acest sistem
6.2 Prelucrarea datelor pentru a obtine coorodoante n sistem WGS 84.
6.2.1 Importul datelor.
Datele pot fi transferate din receptor n computer fie prin intermediul cablului serial, fie cu
ajutorul unui cititor de cartele PCMCIA.
n timpul transferului operatorul are posibilitatea de a controla si edita anumite elemente:
denumirea punctului (se verific dac aceleasi puncte msurate de dou sau mai multe ori au exact
B
Punct EUREF1
A
D
C
Punct EUREF2
A
Punct EUREF2
B
D
C
Punct EUREF1
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.97
aceeasi denumire sau dac puncte diferite au aceeasi denumire), nltimea antenei corespunde cu
nltimea trecut n formularul de teren.
ntotdeauna trebuie realizat o o copie a datelor brute nregistrate n teren. Este recomandabil s
se creeze un director <proiect>.raw n care pentru fiecare receptor (a, b, c, d, etc.), n fiecare zi lucrat,
s se creeze un subdirector <zzllaa><a>. n acest subdirector se copiaz toate fisierele din directorul
GeoDB de pe cartela PCMCIA a receptorului <a> si asa mai departe pentru celelalte receptoare.
6.2.2 Procesarea.
Pentru obtinerea unor rezultate de precizie ridicat este necesar s cunoastem cu o precizie de
10 m coordonatele WGS84 ale unui punct din retea. Dac statia de referint a fost amplasat ntr-un
punct nou, iar un punct de coordonate locale cunoscute a fost stationat cu receptorul mobil, atunci, dac
se cunosc parametrii locali de transformare, se calculeaz mai nti coordonatele WGS84 ale punctului
cunoscut si apoi se calculeaz baza spre punctul nou, obtinndu-se n acest fel coordonatele WGS84 ale
statiei de referint.
Dac nu se cunosc parametrii locali de transformare atunci se calculeaz coordonatele
aproximative ale punctului de referint cu ajutorul metodei single point. Pentru a obtine rezultate
bune trebuie ca punctul s fi fost stationat cel putin 2 3 ore.
Prin setarea implicit satelitii cu o elevatie mai mic de 15 nu sunt utilizati n procesarea
datelor tocmai pentru a reduce efectele negative datorate distorsiunilor din ionosfer. n cazul cnd este
semnalat o intensificare a activittii ionosferice este uneori avantajos, dac au fost observati mai mult
de 5 6 sateliti iar GDOP are valori mici, s mrim valoarea de la 15 la 20, mai ales dac printre
satelitii observati a fost vreunul care nu a depsit aceast elevatie.
n mod normal pentru o crestere a preciziei se utilizeaz att codul ct si faza semnalului
(setarea Automatic). Utilizarea numai a codului poate fi fcut pentru calculul rapid al bazelor atunci
cnd nu este necesar obtinerea unei precizii mai bune de 0.3 m n pozitia determinat. n principiu
rezultatele obtinute prin procesarea cod si faz sau numai faz ar trebui s fie mai mult sau mai putin
identice. Pentru baze mari de aproape 100 km dac efemeridele receptionate sunt suficient de bune
codul poate oferi solutii foarte precise. Dar dac dintr-un motiv oarecare msurtorile de cod sunt
alterate, atunci trebuie procesat numai faza.
n functie de lungimea bazei msurate se utilizeaz algoritmi de calcul diferiti. Limita implicit a
lungimii bazei pentru care se trece de la un algoritm la altul este de 20 km.
Pentru baze sub aceast limit msurtorile pe cele dou frecvente L1 si L2 sunt introduse ca
observatii individuale n prelucrarea prin metoda celor mai mici ptrate. Prin aproximatii succesive se
ncearc determinarea unor seturi ntregi de lungimi de und care s nlture ambiguittile. Criteriul
statistic utilizat a fost denumit FARA (Fast Ambiguity Resolution Approach).
Pentru baze peste aceast limit este utilizat metoda denumit L3. L3 reprezint o combinatie
liniar ntre L1 si L2. Avantajul solutiei L3 este c elimin influenta ionosferei. Dezavantajul este c
valorile ntregi ale lungimilor de und nu mai pot fi calculate si deci nu mai pot fi rezolvate
ambiguittile. Nu este ns foarte important atta timp ct aceast rezolvare ar fi fost foarte greu de
obtinut n mod corect pentru distante foarte mari.
Pragul rms este utilizat pentru a micsora posibilitatea obtinerii unor rezultate nesigure. n timpul
calculelor prin metoda celor mai mici ptrate se calculeaz eroarea medie ptratic (rms) a unei singure
diferente de faz (eroarea medie ptratic a unuttii de pondere), care este dependent de lungimea
bazei, durata sesiunii si distorsiunile ionosferei. Aceast valoare este comparat cu pragul rms.
Optiunea implicit a programului de post procesare este Automatic. Dac rms calculat depseste
valoarea pragului, ambiguittile nu vor fi rezolvate. n cazul metodei rapid static, pentru sesiuni de pn
la 10 minute, mrirea fortat a pragului rms poate duce la acceptarea unei solutii slabe. Pentru sesiuni
de peste 30 de minute pragul rms poate fi mrit fr riscuri. Pragul rms este aplicat numai n cazul
bazelor pn n 20 km.
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.98
Rezolvarea standard se aplic numai bazelor pn la 20 kmsi ncearc s rezolve ambiguittile
si s aplice modelul ionosferic conform cu parametrii setati. Rezolvarea Iono free fixed se aplic de
asemenea bazelor pn la 20 km, calculele efectundu-se n doi pasi. Prima dat se ncearc rezolvarea
ambiguittilor, apoi este calculat un model ionosferic utiliznd valorile obtinute pentru L1 si L2 dup
rezolvarea ambiguittilor. Avantajul acestei a doua metode const n faptul c orice distorsiune a
ionosferei este eliminat att timp ct ambiguittile sunt rezolvate. Ea se recomand tuturor bazelor
ntre 5 si 20 km observate n special n timpul zilei.
Modelul ionosferic este utilizat numai n calculul bazelor sub 20 km. n mod implicit programul
l selecteaz automat. Dac sesiunea a fost suficient de lung programul alege modelul calculat. n orice
alt situatie (dac datele de almanah sunt disponibile) programul selecteaz modelul Klobuchar.
Modelul calculat poate fi utilizat n locul modelului standard. Punctul este calculat utiliznd
diferenta dintre semnalul L1 si L2 la receptia lor n senzorul GPS. Avantajul utilizrii acestui model este
acela c este calculat n functie de conditiile predominante de timp si pozitie. Pentru a utiliza acest
model sesiunea trebuie s dureze cel putin 45 de minute.
Modelul standard este un model empiric care se bazeaz pe comportarea ionosferei n functie de
unghiul orar al soarelui. Corectiile depind de unghiul orar al soarelui, ora cnd se execut msurtoarea
si elevatia satelitilor si se aplic la toate observatiile de faz. n cazul bazelor de peste 20 km efectele
ionosferei sunt eliminate prin evaluarea combinatiei liniare dinte L1 si L2, denumit L3.
Modelul stohastic se poate utiliza pentru rezolvarea ambiguittilor n cazul bazelor medii si
lungi atunci cnd bnuim o activitate ionosferic deosebit. n acest caz trebuie acordat o atentie
deosebit bazelor scurte cnd influentele datorate efectului multipath sau obstructiilor pot fi interpretate
ca influente datorate distorsiunilor ionosferice. Acesta este motivul pentru care setarea implicit a
modelului stohastic este utilizat pentru baze mai mari de 10 km. Dac este selectat optiunea Iono free
float atunci programul va utiliza solutia L3 indiferent de lungimea bazei.
Nu sunt mari diferente ntre rezultatele obtinute utiliznd diferite modele troposferice dar nu se
va lucra niciodat cu optiunea No troposphere activat.
6.2.3 Selectarea bazelor strategii de lucru.
nainte de a ncepe postprocesarea datelor trebuie analizat reteaua GPS msurat.
Obiectivele verificate vor fi: existenta sau obtinerea de coordonate WGS84 suficient de precise
pentru unul din puncte, msurtorile n punctele cu coordonate locale cunoscute, calculul coordonatelor
statiilor de referint, msurtorile executate din aceste statii, selectarea bazelor n functie de lungimea
lor (lungi sau scurte). Dac au existat mai multe puncte care au fost folosite ca statii de referint acestea
trebuie calculate primele. Calculul trebuie s implice si legturile ctre punctele cu coordonate locale
cunoscute. Bazele se vor selecta si se vor calcula separat una cte una, rezultatele vor fi analizate iar
coordonatele obtinute se vor salva dac rezultatele se ncadreaz n parametrii ceruti. Este recomandabil
s existe controale pentru statiile de referint prin determinarea lor din cel putin dou puncte
(redundanta msurtorilor). Odat reteaua statiilor de referint fiind calculat se poate trece la calculul
bazelor radiate. Este bine ca la procesare s se grupeze si s se proceseze separat bazele care se
ncdreaz n acelasi tip de parametri, bazele scurte separat de bazele lungi, bazele msurate rapid static
separat de bazele cu observatii statice lungi.
6.2.4 Interpretarea rezultatelor.
Interpretarea rezultatelor se va face tinnd cont de algoritmul de procesare pentru baze pn sau
peste 20 km. Pentru prima categorie, ca s obtinem rezultate bune trebuie ca ambiguittile s fie
ntotdeauna rezolvate. Pentru aceste baze sunt cutate toate combinatiile de ambiguitti si sunt evaluate
toate valorile rms pentru fiecare diferent de faz simpl pentru fiecare ambiguitate n parte. Sunt
comparate apoi solutiile obtinute cu cea mai sczut valoare a rms. Dac diferenta ntre valorile rms
este semnificativ setul de ambiguitti atasat celei mai sczute valori a rms este considerat cel corect.
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.99
Decizia este bazat pe metode statistice. Trebuie tinut cont c rezultatele metodei celor mai mici ptrate
ofer de fapt cele mai probabile valori considerate n mod curent valorile adevrate. Oricum trebuie s
se tin cont de faptul c distorsiunile ionosferice majore cauzeaz erori sistematice n observarea
fazelor. n acest caz chiar dac metoda celor mai mici ptrate este corect din punct de vedere statistic
rezultatul ei poate fi departe de adevr. Metodele statistice continute n algoritmii FARA (Fast
Ambiguity Resolution Aproach) sunt bazate pe criterii foarte restrictive pentru a ncerca s asigure cea
mai mare probabilitate unui rezultat de ncredere. Dac durata sesiunii a fost prea mic, numrul de
sateliti a fost mic sau valoarea GDOP a fost mare, algoritmul nu poate rezolva ambiguittile si deci
performantele sistemului nu pot fi atinse. Pentru o apreciere general a preciziei de determinare n acest
caz se pot amplifica cu un ordin de mrime valorile sigma obtinute pentru fiecare coordonat estimat.
Pentru baze de peste 20 km algoritmul utilizat nu se bazeaz pe rezolvarea ambiguittilor ci pe
combinatii ale semnalelor receptionate.
6.2.5 Interpretarea raportului de procesare.
n cazul bazelor sub 20 km, n raport, dup fiecare baz calculat este prezentat un rezumat al
algoritmului FARA. Trebuie verificat ca ntotdeauna: numrul satelitilor s fie minim patru, valoarea
rms float (nainte de fixarea ambiguittilor), valoarea rms fix (valoarea dup fixarea ambiguittilor)
care trebuie s fie usor mai mare ca rms float. Ambele valori trebuie s nu depseasc pragul rms
stabilit initial. Este recomandabil ca modificarea valorii pragului rms s se fac cu foarte mare atentie si
numai atunci cnd exist o experient suficient de lucru cu GPS. La calculul bazelor cu lungimi
diferite este recomandabil s se fac mai multe prelucrri si s se interpreteze rezultatele pentru a putea
alege parametrii optimi de prelucrare. Pentru baze de peste 20 km n raportul de procesare se va verifica
numrul satelitilor utilizati si valoarea rms pentru unitatea de pondere. Aceast valoare trebuie s fie
sub 20 mm pentru baze cuprinse ntre 20 si 50 km. Pentru baze mai mari valoarea este ceva mai mare
datorit, n special, imperfectiunilor minore care apar n transmiterea efemeridelor.
Trebuie comparate deasemenea datele din raportul de prelucrare cu datele din formularul de
teren. n cazul dublei determinri este bine s fie comparate rapoartele, mai ales atunci cnd rezultatele
nu se ncadreaz n tolerantele stabilite pentru proiectul respectiv.
6.2.6 Salvarea rezultatelor.
Dup verificarea continutului raportului de procesare coordonatele punctului determinat pot fi
salvate. n cazul n care exist mai multe perechi de coordonate pentru acelasi punct obtinute din
prelucrarea de baze diferite atunci programul face automat media ponderat a coordonatelor obtinute.
Aceasta trebuie s se ncadreze n limita impus la crearea proiectului.
Pentru utilizatorii receptoarelor cu o singur frecvent.
Se vor utiliza numai sesiunile n care au fost observati minimum 5 sateliti cu o elevatie mai mare
de 15, iar valoarea GDOP a fost mai mic de 8 pe ntreaga durat a sesiunii. Regula de baz
recomandat pentru stabilirea duratei sesiunilor este de 5 minute pentru fiecare km, dar nu mai putin de
15 minute. n mod implicit programul nu ncearc s rezolve ambiguittile dac sesiunea a durat mai
putin de 9 minute. Odat ambiguittile rezolvate lungimea bazei este calculat cu o precizie de 5 10
mm + 2ppm. Pentru obtinerea unei precizii ridicate este recomandabil ca antenele s fie orientate spre
aceeasi directie (de ex: mufa de conectare ndreptat spre Nord). Pentru baze de peste 10 km precizia
obtinut este inferioar celei obtinute cu receptoare dubl frecvent deoarece efectele distorsiunilor
ionosferice nu pot fi eliminate.
6.3 Calculul coordonatelor punctelor determinate GPS n timp real
Dup cum a fost precizat mai sus, calculul coordonatelor punctelor determinate GPS se poate
face n dou moduri, n functie de tipul tehnologiei GPS utilizate: clasic (cu post-procesarea datelor)
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.100
sau cu transmiterea datelor n timp real prin unde radio UHF (real-time). Prelucrarea nregistrrilor GPS
se face n functie de tipul datelor nregistrate de la sateliti, care pot avea o singur frecvent (L1) sau
dou frecvente (L1 si L2).
n Fig. 6.3 si 6.4 sunt prezentate exemple de calcul ale unor msuratori.
LFFO Ettc 3rget (LFCFO2)
Ete : LFCFO2, Usng cbs. LrcO2 (OF : 4.C2 n)
Fef. : LFCFO42C (44C4'CD.C7EE"!, 2C E'4C.O4OD"E, 42D.74DB n + 4.472 n), Usng cbs. LrcO42C
Frcn feb 2C, 4DDD, 44h44n2O.Os 3c feb 2C, 4DDD, 44hC4n4O.Os (L3C + O2:OO:OO)
Ev Nn: E.O Oeg; Frcn cUrtn gncreO; 3c cUrtn gncreO
2C C'CC.7ECO"E
2C C'CC.7E7O"E
2C C'CC.7EBO"E
2C C'CC.7EDO"E
2C C'CC.7COO"E
2C C'CC.7C4O"E
44C4'4E.7BEE"!
44C4'4E.7BCO"!
44C4'4E.7BCE"!
Lcng.
Lt.
4:4
E sO : O.OO4D n
! sO : O.OO2B n
F sO : O.OO74 n
2C C'CC.7EB7"E
44C4'4E.7BED"!
42B.OCC2
EseIne : 47DO.7BCD n
E : -DOC.CDOD n
EY : 4E4O.47E2 n
EZ : 4CC.44C4 n
( 2OO Nes. )
Fig. 6.3. - Calculul coordonatelor punctului LROP02 prin procedeul LR Rapid Static
LFFO Ettc 3rget (LFCFOC)
Ete : LFCFOC, Usng cbs. LrcOC (OF : 4.2D n)
Fef. : LFCFO42C (44C4'CD.C7EE"!, 2C E'4C.O4OD"E, 42D.74DB n + 4.472 n), Usng cbs. LrcO42C
Frcn feb 2C, 4DDD, 44h4EnCE.Os 3c feb 2C, 4DDD, 42h Bn4E.Os (L3C + O2:OO:OO)
Ev Nn: E.O Oeg; Frcn cUrtn gncreO; 3c cUrtn gncreO
2C 7'44.474O"E
2C 7'44.472O"E
2C 7'44.47CO"E
2C 7'44.474O"E
2C 7'44.47EO"E
44C4'E4.2CBO"!
44C4'E4.2CBE"!
44C4'E4.2CDO"!
Lcng.
Lt.
4:4
E sO : O.OO4C n
! sO : O.OOC4 n
F sO : O.OOCE n
2C 7'44.47C4"E
44C4'E4.2CBC"!
42C.74E2
EseIne : C2D4.44OC n
E : -4CC7.DECC n
EY : 2B2D.4OC7 n
EZ : 2E2.427E n
( 27C Nes. )
Fig. 6.4. - Calculul coordonatelor punctului LROP03 prin procedeul LR Rapid Static
Din Fig. 6.3 se observ c prelucrrile nregistrrilor efectuate au condus pentru punctul
LROP02 la o precizie de determinare de 1,9 mm pe latitudine, 2,8 mm pe longitudine si 7,1 mm pe
cot.. Din Fig. 6.4 se observ c pentru punctul LROP03 preciziile de determinare sunt apropiate: 4,3
mm pe latitudine, 3,1 pe longitudine si 6,5 mm pe cot.
Utiliznd aparatur cu transmiterea datelor prin unde radio, n timp real, coordonatele sunt
obtinute direct la teren si afisate pe ecranul palm-top-ului.
Dup efectuarea initializrii statiei secundare (durat 1,2,3 minute), se poate trece la efectuarea
msurtorilor n regim real-time. Exist dou metode de msurare:
1. metoda nregistrrii individuale a fiecrui punct msurat (durat 1,2,3 secunde la fiecare punct);
2. metoda traiectografiei (n mers), care presupune nregistrri la un anumit interval de timp sau
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.101
la o anumit distant, dup cum doreste operatorul.
Metoda traiectografiei si gseste aplicatie n executarea benzilor de studii pentru drumuri, ci
ferate, canale, diguri, retele de nalt tensiune) precum si la delimitarea cadastral a teritoriilor
administrative a comunelor si a intravilanelor componente. De asemenea, este foarte utilizat la trasri
sau cutarea unui punct cu coordonate date. Se introduc coordonatele punctului de determinat n
memoria GPS-ului si, cnd se d cutare, pe ecranul palm-top-ului apare distanta ctre punctul cutat si
orientarea. La cutare, receptorul emite semnale acustice functie de apropierea sau deprtarea de punctul
cutat.
Coordonatele obtinute la teren, sunt n mod implicit afisate n sistemul WGS84, ns exist
posibilitatea afisrii lor n sistemul Stereografic 1970, dac se ncarc un proiect adecvat, care s
cuprind cei 7 parametri de transformare Helmert pentru zona de lucru. Acesti parametri se pot obtine
apriori, pe baza unor puncte comune, cu coordonate att n WGS 84 ct si n Stereo 70. Un exemplu de
pregtire a unui astfel de proiect n vederea implementrii lui pe micro-controlerul GPS, este artat n
Fig. 6.5.
Fig. 6.5. - Pregtirea proiectului de lucru n vederea implementrii lui
pe micro-controlerul GPS
Aceste coordonate urmeaz a fi transformate din sistemul WGS84 n sistemul geodezic national
Stereografic 1970, conform algoritmului prezentat n Capitolul 7.
6.4 Determinarea coordonatelor n sistem national, Stereografic 1970
Pentru a determina coordonate n sistemul national se utilizeaz parametri de transcalcul. n
Capitolul 7 sunt prezentati pasii care trebuie parcursi pentru a determina cei 7 paremtri Helmert.
Desigur, exist algoritmi care pot utiliza un numr mai mare de parametri, dar algoritmul cu 7 paramtri
este cel mai utilizat n practic. Pentru a obtine acesti parametri este nevoie de minim 3 puncte cu
coordonate n ambele sisteme: WGS84 si Stereografic 1970. De fapt, la limit, este nevoie de dou
puncte care s aib corespondent pe fiecare coordonat n parte (X, Y si Z) si un punct care s aib
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.102
corespondent doar pe o coordonat (X, Y sau Z). Astfel, se pot scrie 7 ecuatii din care rezult cei 7
parametri Helmert de transformare. Pentru a avea un control, n practic se utilizeaz minim 4 puncte cu
coordonate comune: Stereografic 1970 si WGS84. Punctele comune trebuie s fie astfel distribuite nct
s acopere integral zona n care se vor transcalcula punctele determinate GPS. n figura 6.6 a este
prezentat modul ideal de distributie a punctelor comune (A, B, Csi D) n raport de punctele determinate
GPS. n figura 6.6 b este prezentat o distributie defectuoas a punctelor comune (A, B, C si D) n
raport de punctele determinate GPS. Se vehiculeaz frecvent ideea c msurtorile GPS si implicit
prelucrrile nu pot fi gresite. Este complet fals. Msurtorile nu pot fi gresite, desigur, dect dac
geometria satelitilor era proast, nu s-au rezolvat ambiguittile, au fost schimbate frecventele, etc.
Practic, receptoarele GPS creaz niste fisiere de date (se poate face analogie cu statiile totale care
nregistreaz distante nclinate, directii si unghiuri zenitale) brute. Din acestea, cu programe de firm, se
pot determina coordonate n sistem WGS84. Aceste coordonate sunt bune si, desigur, dac se pstreaz
principiul determinrii cel putin din dou puncte vechi, independente, avem si control si precizia
determinrii. Defectuoas este trecerea n sistem Stereografic 1970. Dac se utilizeaz o configuratie ca
cea din figura 6.6 b, atunci punctele transcalculate pot avea diferente mari fat de valoarea real
absolut.
a) configuratie optim b) configuratie defectuoas
Figura 6.6 Configuratia punctelor comune n cazul transcalculului de coordonate
n anul 1996 s-a determinat un set de parametri pentru toat tara de trecere din sistem WGS84 n
sistem Stereografic 1970 si invers. Tot n anul 1996 s-a determinat un set de parametri valabili n zona
aeroportului Caransebes. n anul 1997 s-a determinat un set de parametri valabili pentru zona judetului
Caras Severin. Astfel, n cadrul studiului au fost introduse puncte determinate n sistem WGS 84 cu
legare la reteaua EUREF, 18 puncte: 1- 5 n localitatea Caransebes, 6-7 din localitatea Marga la 23 km
de Caransebes, 8-9 din localitatea Poiana Mrului la 24 km de Caransebes,10-14 din localitatea
Moldova Nou la 88 km de Caransebes, 15-18 din localitatea Iasi, la 460 km de Caransebes. Pentru
ficare punct s-au calculat trei variante de coordonate: cu parametri pe localitatea Caransebes, cu
parametri pe judetul Caras Severin, cu parametri pe tar. n Anexa 1 sunt calculate diferente de
coordonate pentru fiecare punct n parte:
- ntre coordonatele calculate cu parametri pe localitatea Caransebes si coordonatele calculate cu
parametri pe judetul Caras Severin;
- ntre coordonatele calculate cu parametri pe localitatea Caransebes si coordonatele calculate cu
parametri pe tar;
- ntre coordonatele calculate cu parametri pe judetul Caras Severin si coordonatele calculate cu
A B
D C
A
B
D C
Puncte comune
Puncte msurate GPS
de transcalculat n
sistemul stereografic
1970
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.103
parametri pe tar;
Se observ c pentru localitatea Caransebes diferentele de coordonate sunt apropiate ca valoare
pentru fiecare tip de parametri utilizati, dar mai ales sunt constante. Acolo unde apar diferente mari
(20 cm), se poate face o verificare pe puncte cu coordonate cunoscute si se va aplica o translatie pe x,
y si altitudine. Se observ c utiliznd parametri de localitate pentru zone mai ndeprtate, diferentele
devin mari pe coordonate si pe altitudine: 17 metri pe x, 9 metri pe y si 76 metri pe altitudine. De
asemenea, cu ct zone pe care se calculeaz parametri este mai mare (judet), ea se poate extinde si la
zone limitrofe, iar diferentele dintre coordonatele calculate pentru zona Iasi cu parametri pe judet si pe
tar nu sunt foarte mari (1 metru pe x, 0.5 metri pe y si 2 metri pe altitudine).
Ca o concluzie, parametri pe tar pot da diferente mari: 20 cm pe coordonate, dar constante pe
zone mici (localitate), putnd fi considerate ca simple translatii.
n majoritatea trilor Europene exist parametri determinati pentru ntreaga tar sau regiuni mai
mari. De asemenea, este determinat ondulatia cvasigeoidului sau a geoidului. Acest set de parametri
este introdus n programul de prelucrare si se obtin coordonate direct n sistemul pentru care au fost
determinati parametri respectivi. De exemplu, exist un set de parametri universali pentru proiectia
UTM (Capitolul 3.3.3). Setul de parametri utilizabili pentru Romnia trebuie determinat de Institutul de
Geodezie, ca si ondulatia cvesigeoidului.
6.4.1 Determinarea parametrilor de transcalcul pe plan local
Se utilizeaz pe plan local. Plan local, asa cum am prezentat mai sus, poate fi o localitate, un
judet, o regiune. Parametri determinati pe o zon restrns au valabilitate doar n poligonul pe care l
descriu punctele comune. Extrapolarea lor este foarte periculoas Anexa 1. Calculul parametrilor de
transcalcul cu programe care dau posibilitatea vizualizrii corectiilor este foarte bun, deoarece d
dimensiunea preciziei cu care se vor transcalcula coordonatele punctelor noi. Totdeauna n transcalcul
se vor introduce si punctele care au fost utilizate la determinarea parametrilor, n acest mod verificnd
direct diferenta ntre coordonata dat ca punct vechi (utilizat la transcalcul) si coordonata transcalculat.
Un exemplu de transcalcul local este prezentat nAnexa 1, pentru localitatea Caransebes.
6.4.2 Determinarea parametrilor de transcalcul pe tar
Respect aceleasi reguli ca la Capitolul 6.4.1, cu conditia c se refer la obtinerea unui set de
parametri valabili pe ntrega tar. Pentru aceasta trebuie alese puncte ct mai aproape de granit si
cteva puncte n interior, pentru omogenizare. Dezavantajul este legat de faptul c precizia retelei
geodezice nationale este de circa 15 centimetri. Pe suprafete att de ntinse (de la Marea Neagr la
Satu Mare sau de la Iasi la Timisoara), apar zone n care diferenta ntre coordonatele absolute din
inventare si coordonatele transcalculate este mare ( 20 centimetri). Avantajul este c diferenta n zon
se mentine constant pe cele dou axe si poate fi considerat ca o translatie.
6.4.3 Determinarea parametrilor de transcalcul cu programe furnizate
de firmele care produc receptoare
n prezent toate firmele productoare de receptoare GPS produc si comercializeaz programe de
prelucare a datelor. Aceste programe, functie de pret, furnizeaz anumite date. Dup cum a fost
mentionat, rezult diferente de coordonate, .X, .Y, .Z, n sistem tridimensional, pe elipsoidul
WGS84. Functie de coordonatele punctului considerat cunoscut (single point, retea EUREF sau
determinat de pe plan), toate celelalte puncte vor fi determinate n sistemul respectiv. Dac cei 7
parametri Helmert de transformare a coordonatelor din sistem WGS84 n sistemul de coordonate plan
Stereografic 1970 nu sunt cunoscuti, acestia pot fi determinati cu programele furnizate de firmele
productoare de receptoare GPS. Pentru aceasta este nevoie de minim 3 puncte cu coordonate cunoscute
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.104
n ambele sisteme. Astfel, exist posibilitatea de a introduce cele trei perechi de coordonate: X, Ysi Z n
sistem WGS84, rezultate din msurtori si prelucrarea datelor si x, y si h
E
preluate din inventarele de
coordonate ale Oficiilor de Cadastru. Cota, h
E
trebuie transformat din h
N
preluat din inventare. Tot la
cot, trebuie avut n vedere dac altitudinea este referit la Marea Neagr sau la Marea Baltic. ntre
aceste dou sisteme de altitudini exist o diferent de circa 18 centimetri. Practic, diferenta se
calculeaz pentru fiecare punct n parte. Problema care apare este legat de faptul c la un moment dat,
pentru coordonatele n sistem Stereografic 1970 se cere factorul de scar. De obicei, tentatia este de a
introduce factorul de scar 0.99975, care este specific pentru centrul proiectiei, n punctul de intersectie
a meridianului 25 cu paralelul de 46. Pentru a calcula corect parametri, se va calcula un factor de
scar mediu, functie de pozitia punctelor comune fat de cercul de deformatie minim. Acest factor se va
introduce n programul elaborat de firma productoare. Este important de retinut c zona pe care se va
efectua transcalculul nu trebuie s fie mai mare de 10/10 kilometri. Dac se depseste aceast limit,
factorul de scar va introduce erori inadmisibile n coordonatele calculate.
6.5 Prelucrarea datelor GPS.
n acest capitol sunt prezentate doar prelucrrile legate de coordonate n sistem WS84. Dup
cum a fost mentionat anterior, diferentele de coordonatele obtinute din nregistrrile la sateliti sunt
referite la elipsoidul WGS84. Coordonatele finale pot fi referite la acest elipsoid. Fiecare punct este
stationat si va primi coordonate functie de numrul de vectori rezultati. n urma prelucrrilor de date,
pentru fiecare punct rezult mai multe rnduri de coordonate, considerate coordonate provizorii. Se
poate face o analogie cu msurtorile clasice de directii, distante si unghiuri zenitale din care rezult
coordonate provizorii pentru punctele noi. Din aceste coordonate, fcnd media sau alegnd aleatoriu
una din valori, rezult coordonatele provizorii care intr n compensare. Aceste coordonate provizorii
intr ntr-un program de prelucrare, metoda celor mai mici ptrate, furnizat de firma productoare.
Coordonatele rezult n sistem WGS84, programul furniznd o serie de date: precizia fiecrei
coordonate n parte, matricea ponderilor, matricea cofactorilor, etc.
Preciziile furnizate sunt valabile numai pentru determinrile GPS, pe elipsoidul WGS84. Uneori
coordonatele finale pe elipsoidul WGS84 pot fi translatate si rotite dac nu avem suficiente puncte cu
coordonate cunoscute pe elipsoidul WGS84, chiar dac aparent totul este foarte bine. Una din verificri
poate fi legat de statiile permanente existente n zon. Acestea pot suplini lipsa punctelor cu
coordonate cunoscute n sistem WGS84.
6.6 Prelucrarea datelor GPS combinate cu msurtori clasice
(distante, directii, unghiuri zenitale, diferente de nivel)
S presupunem c avem o retea geodezic n care s-au efectuat msurtori cu statia total
(distante, directii, unghiuri zenitale) si cu receptare GPS.
Coordonatele rezultate n urma prelucrrii datelor GPS, rezultate pe elipsoidul WGS 84 sau n
sistem EUREF la o anumit epoc sunt transcalculate n sistem de coordonate Stereografic 1970
(Capitolul 7). Aceste coordonate sunt transformate n diferente de coordonate, respectiv.x, .ysi .h
N
.
Fiecare diferent de coordonate d dou ecuatii pentru fiecare pereche de puncte. Pentru fiecare punct al
retelei, stationat cu statia total, rezult de asemenea ecuatii pe directii si distante. Pentru altitudini se
vor scrie ecuatii de diferent de nivel pentru .h
N
obtinut din datele GPS si diferente de nivel date cu
statia total. n acest mod, corectiile vor fi legate de .x, .y, directii si distante pentru pozitia
planimetric, respectiv .x si .y n sistem Stereografic 1970 si de .h
N
pentru altitudini. Necunoscutele
sunt legate de x si y n pozitie planimetric si de h
N
pentru altitudini. Toate aceste date sunt prelucrate
prin metodacelor mai mici ptrate, msurtori indirecte.
CURS GEODEZIE SATELITARA
Capitolul 6. Prelucrarea msurtorilor GPS pag.105
CURS GEODEZIE SATELITARA
Capitolul 7. Transformri de coordonate pag.106
7. TRANSFORMRI DE COORDONATE
7.1. Introducere
Cadrul de referint al GPS este Sistemul Geodezic Mondial 1984 (WGS-84). Cnd se utilizeaz
GPS coordonatele statiilor terestre sunt obtinute n acelasi sistem de referint. Totusi, utilizatorul nu
este de obicei interesat n calculul coordonatelor punctelor ntr-un sistem global. Rezultatele sunt
preferate ntr-un sistem local de coordonate cum ar fi: coordonate geodezice (elipsoidale) sau
coordonate plane. ntruct WGS-84 este un sistem geocentric, sunt necesare transformri pentru a-l
aduce ntr-un sistem local.
7.2. Transformri de coordonate
7.2.1. Coordonate carteziene si coordonate elipsoidale
Se definesc coordonate carteziene (rectangulare) X,Y,Z ale unui punct n spatiu si considernd
un elipsoid de revolutie cu aceeasi origine ca a sistemului de coordonate carteziene, punctul poate fi
definit si prin coordonate elipsoidale B, L, h (fig. 3.2). ntre coordonatele carteziene si elipsoidale exist
urmtoarele relatii:
, )
, )
B h N
a
b
Z
L B h N Y
L B h N X
2
2
sin
sin cos
cos cos
|
|
.
|
\
|
+
|
|
.
|
\
|
=
+ =
+ =
(7.1)
n care N este raza de curbur a primului vertical
B b B a
a
N
2 2 2 2
2
sin cos +
= (7.2)
iar a si b sunt semiaxele elipsoidului de referint.
Formulele (7.1) transform coordonatele elipsoidale B, L, h n coordonate carteziene X,Y,Z.
Pentru aplicatiile GPS este mai important transformarea invers deoarece se dau coordonatele
carteziene iar cele elipsoidale se deduc. Astfel, problema este de a transcalcula coordonatele elipsoidale
B, L, h n coordonatele carteziene X,Y,Z. n mod frecvent problema este rezolvat iterativ. Din Xsi Y
poate fi calculat raza paralelului
, ) B h N Y X r
2 2
cos + = + = (7.3)
Aceast ecuatie se mai poate scrie ca:
N
B
r
h =
cos
(7.4)
astfel nct s apar explicit nltimea elipsoidal.
Introducnd :
2
2 2
2
a
b a
e
= (7.5)
CURS GEODEZIE SATELITARA
Capitolul 7. Transformri de coordonate pag.107
prima excentricitate numeric, pe care o mai putem scrie
2
2
2
e 1
a
b
= si substituind-o n ecuatia lui Z din
(7.1), rezult:
, ) B N e h N Z
2
sin + = (7.6)
Ecuatia (7.6) se mai poate scrie ca:
, ) B
h N
N
e 1 h N Z
2
sin
|
.
|
\
|
+
+ = (7.7)
mprtind aceast expresie cu (7.3) rezult:
tgB
h N
N
e 1
r
Z
2
|
.
|
\
|
+
= (7.8)
sau
h N
N
e 1
1
r
Z
tgB
2
+
= (7.9)
Pentru longitudinea L ecuatia:
X
Y
tgL = (7.10)
este obtinut din (7.1) prin mprtirea primelor dou ecuatii.
Longitudinea poate fi calculat direct din (7.10). Altitudinea h si latitudinea B sunt determinate
din (7.4) si (7.9). Problema cu (7.4) este c depinde de latitudinea nc necunoscut. Ecuatia (7.9) este
nerezolvabil deoarece latitudinea de calculat este continut implicit n partea dreapt n N. Se poate
gsi o solutie iterativ de calcul bazat pe aceste 3 ecuatii folosind urmtorii pasi:
1. se calculeaz
2 2
Y X r + =
2. se calculeaz o valoare aproximativ
, ) 0
B :
, ) 2 0
e 1
1
r
Z
tgB
=
3. calculul unei valori aproximative pentru
, ) 0
N :
, )
, ) , ) 0
2 2
0
2 2
0
B b B a
a
N
sin cos +
=
4. calculul altitudinii elipsoidale:
, )
, ) 0
0
N
B
r
h =
cos
5. calculul valorii mbunttite a latitudinii:
, )
, )
|
|
.
|
\
|
+
=
h N
N
e 1
1
r
Z
tgB
0
0 2
CURS GEODEZIE SATELITARA
Capitolul 7. Transformri de coordonate pag.108
6. verificarea pentru un alt pas al iteratiei: dac
, ) 0
B B= atunci se trece la pasul urmtor, dac nu
se nlocuieste
, )
B B
0
= si continu cu pasul 3.
7. calculul longitudinii L din:
X
Y
tgL =
Formulele folosite pentru transformarea lui X, Y, Z n B, L, h sunt:
, )
u
u +
=
3 2
3 2
a e r
b e Z
arctg B
cos
sin '
(7.11)
n care
pb
Za
arctg = u (7.12)
este o cantitate auxiliar, iar
, )
2
2 2
2
b
b a
e
= ' (12-13)
este a doua excentricitate numeric. n prezent nu exist motive pentru care aceste formule s fie mai
putin folosite dect procedeul iterativ. Ambele metode sunt la fel de bune si pot fi usor programate.
7.2.2.Coordonate elipsoidale si coordonate plane
Spre deosebire de sectiunea anterioar, punctele se consider numai pe elipsoid. Astfel ne
intereseaz numai latitudinea Bsi longitudinea L. Obiectivul este aducerea prin transcalcul a unui punct
B,L de pe elipsoid ntr-un punct x,y n plan.
Exist mai multe tipuri de proiectii cartografice, unele mai folosite dect altele. n principiu,
, )
, ) b a L B y y
b a L B x x
, ; ,
, ; ,
=
=
(7.14)
sunt formulele generale cerute de proiectiile cartografice. Aplicatiile geodezice au nevoie de proiectii
conforme. Conformitatea nseamn c un unghi pe elipsoid se pstreaz nedeformat la proiectarea pe un
plan.
Cele mai importante proiectii conforme sunt:
1 - Proiectia conic. Considernd proiectia conform Lambert, conul este tangent la elipsoid la
paralelul standard. Dup desfsurarea suprafetei conice meridianele devin convergente ntr-un punct
denumit apex. Acest punct este centrul paralelelor care se proiecteaz ca arce de cerc.
2 - Proiectia cilindric. Acesta este un caz particular al proiectiei conice, cnd apexul se mut la
infinit. Suprafata cilindric este tangent la ecuator.
3 - Proiectia stereografic polar. Aceasta este de asemenea un caz special al proiectiei Lambert.
Apexul conului se mut n pol si atunci conul devine un plan. n contrast cu metodele descrise mai sus
(n care elipsoidul este transformat direct n suprafat de proiectie plan, dup desfsurare), proiectia
stereografic este o metod indirect. Primul pas este transformarea elipsoidului ntr-o sfer, iar
urmtorul pas realizeaz tranzitia de la suprafata sferei la suprafata de proiectie.
n cursul de Cartografie matematic este tratat pe larg transformarea coordonatelor Bsi L de
pe elipsoid n x, y Stereo 70 sau x, y Gauss.
CURS GEODEZIE SATELITARA
Capitolul 7. Transformri de coordonate pag.109
7.2.3.Transformri altimetrice
n sectiunile anterioare un punct B, L pe elipsoid a fost transpus n plan. Altitudinea elipsoidal
poate fi complet ignorat. n aceast sectiune problema cea mai important este altitudinea. Formula
h = H + N (7.15)
n care:
h = altitudinea elipsoidal,
H = altitudine ortometric, (7.16)
N = ondulatia geoidului,
este relatia dintre elipsoid si geoid.
Dup cum se vede n fig. 7.2, aceast formul este aproximativ, dar suficient de precis pentru
scopurile propuse. Unghiul exprim diferenta dintre verticala dat de firul cu plumb si normala la
elipsoid. Acest unghi nu trebuie s depseasc 30'' de arc n cele mai multe zone.
Fig. 7.2 Definirea nltimilor
Prin pozitionare cu GPS rezult coordonate X,Y,Z. Dup aplicarea transformrilor (7.11)
altitudinile elipsoidale devin utilizabile. Dac este dat unul din cei doi termeni din relatia (7.15) atunci
cellalt trebuie calculat. Astfel, dac geoidul este cunoscut altitudinile ortometrice pot fi derivate. Pe de
alt parte, dac se cunosc altitudinile ortometrice atunci altitudinile elipsoidale pot fi derivate.
7.3. Transformri analogice
Transformrile de coordonate din sectiunile precedente transform un tip de coordonate n alt tip
de coordonate pentru acelasi punct. Coordonatele carteziene X, Y, Z au fost transformate n coordonate
elipsoidale B, L, h si coordonatele bidimensionale elipsoidale B, L au fost transformate n coordonate
plane x, y. n final, altitudinea elipsoidal este transformat fie n altitudine ortometric fie n ondulatie
a geoidului.
O transformare analogic transform un sistem de coordonate de un anumit tip ntr-un alt sistem
de coordonate de acelasi tip (sisteme tridimensionale, bidimensionale si unidimensionale),
transformrile analogice fiind distincte.
7.3.1. Transformri tridimensionale
Considerm dou sisteme de coordonate carteziene tridimensionale formnd vectorii X si X
T
(fig.7.3).
CURS GEODEZIE SATELITARA
Capitolul 7. Transformri de coordonate pag.110
Fig. 7.3 Transformri analogice tridimensionale (3D)
Transformarea dintre cele dou sisteme poate fi formulat prin relatia
X R c X
T
+ = (7.17)
care este denumit transformare Helmert. Termenul este factorul de scar, c este vectorul translatie:
3
2
1
c
c
c
c = (7.18)
si R este matricea de rotatie care este compus din 3 rotatii succesive:
, ) , ) , )
1 1 2 2 3 3
R R R R o o o = (7.19)
si este dat de :
2 1 3 1 2
3 2 1 3 1 3 2 1 3 1 3 2
3 2 1 3 1 3 2 1 3 1 3 2
R
o o o o o
o o o + o o o o o o o o o
o o o o o o o o + o o o o
=
cos cos cos sin sin
sin sin cos cos sin sin sin sin cos cos cos cos
cos sin cos sin sin cos sin sin sin cos cos cos
(7.20)
dup substituirea matricelor de rotatie singulare.
CURS GEODEZIE SATELITARA
Capitolul 7. Transformri de coordonate pag.111
, )
, )
, )
1 0 0
0
0
R
0
0 1 0
0
R
0
0
0 0 1
R
3
2
1
o o
o o
= o
o o
o o
= o
o o
o o = o
cos sin
sin cos
cos sin
sin cos
cos sin
sin cos
(7.20')
nainte de a continua, vor fi discutati pe scurt cei 7 parametrii Helmert ai transformrii
analogice:
- componentele vectorului de translatie c considerate coordonatele originii sistemului X n
sistemul X
T
;
- - factorul de scar ; pentru anumite cazuri se utilizeaz (dar nu este necesar pentru GPS) trei
factori de scar, cte unul pentru fiecare ax;
- - matricea de rotatie R este o matrice ortogonal cu cei trei paramatrii ca necunoscute.
n cazul cunoasterii parametrilor c, , R, un punct din sistemul X poate fi transformat ntr-un
sistemX
T
prin relatia (7.17). Dac parametrii de transformare nu sunt cunoscuti, ei pot fi determinati cu
ajutorul unor puncte comune, adic coordonatele aceluiasi punct sunt date n ambele sisteme. Deoarece
fiecare punct comun (dat de X si X
T
) d trei ecuatii, sunt suficiente dou puncte comune si un
component comun aditional (de ex. altitudinea) pentru a rezolva cei 7 parametrii necunoscuti. n
practic se folosesc mai multe puncte comune si atunci parametrii necunoscuti sunt calculati prin
metoda celor mai mici ptrate.
Dac n ecuatia (7.17) parametrii sunt nelineari, atunci ea trebuie linearizat. Notnd valorile
provizorii n parantez:
(c), () si (R) (7.21)
valorile compensate sunt obtinute prin:
, )
, ), )
, ) R R d R
d 1
c d c c
=
+ =
+ =
(7.22)
Diferenta de scar d, cresterile vectorului de translatie
3
2
1
c d
c d
c d
c d = (7.23)
si elementele matricii diferentiale de rotatie dR
1 d d
d 1 d
d d 1
R d
1 2
1 3
2 3
o o
o o
o o
= (7.24)
devin acum noile necunoscute. Matricea diferential de rotatie este obtinut prin introducerea
CURS GEODEZIE SATELITARA
Capitolul 7. Transformri de coordonate pag.112
cantittilor mici d
i
n ecuatia (7.20), considernd cosdo
i
~ 1 si sindo
I
~ do
i
si neglijnd termenii de
ordinul II.
Modelul linearizat pentru un singur punct i este formulat ca:
, ) p d A X X
i i T Ti
+ = (7.25)
n care:
, ) , ), ) , ) c X R X
i i T
+ = (7.26)
care poate fi calculat din parametrii de transformare provizorie si dau coordonatele X
i
. Matricea A
i
si
vectorul parametrilor dp sunt:
, ) , ) , )
, ) , ) , )
, ) , ) , ) 0 X Y Z 0 1 0
X 0 Z Y 0 1 0
Y Z 0 X 0 0 1
A
i i i
i i i
i i i
i
A A A
A A A
A A A
= (7.27)
T
3 2 1 3 2 1
d d d d dc dc dc dp o o o = (7.27')
Componentele (AX
i
), (AY
i
), (AZ
i
) ale matricii A
i
sunt date de:
, ) , ) , )
, ) , ) , )
, ) , ) , )
3 i T i
2 i T i
1 i T i
c Z Z
c Y Y
c X X
= A
= A
= A
(7.28)
n care componentele vectorului , )
i T
X sunt obtinute din rel.(7.26).
Ecuatia (7.25) n combinatie cu (7.26) si (7.27) este acum un sistem de ecuatii pentru punctul i.
Pentru n puncte comune matricea A este:
n
2
1
A
A
A
A
= (7.29)
Pentru trei puncte comune matricea este:
, ) , ) , )
, ) , ) , )
, ) , ) , )
, ) , ) , )
, ) , ) , )
, ) , ) , )
, ) , ) , )
, ) , ) , )
, ) , ) , ) 0 X Y Z 1 0 0
X 0 Z Y 0 1 0
Y Z 0 X 0 0 1
0 X Y Z 1 0 0
X 0 Z Y 0 1 0
Y Z 0 X 0 0 1
0 X Y Z 1 0 0
X 0 Z Y 0 1 0
Y Z 0 X 0 0 1
A
3 3 3
3 3 3
3 3 3
2 2 2
2 2 2
2 2 2
1 1 1
1 1 1
1 1 1
A A A
A A A
A A A
A A A
A A A
A A A
A A A
A A A
A A A
= (7.30)
care conduce la o usurare a determinrii sistemului. Compensarea ecuatiilor normale prin producerea
parametrului vectorului dp si corectarea valorilor prin (7.30). Odat ce cei 7 parametrii Helmert ai
transformrii prin asemnare sunt determinati, formula (7.25) poate fi utilizat la transformarea altor
puncte. De exemplu, coordonatele WGS-84 ale unui punct obtinut prin observatii GPS pot fi
CURS GEODEZIE SATELITARA
Capitolul 7. Transformri de coordonate pag.113
transformate ntr-un sistem local national nongeocentric.
Combinarea datelor GPS cu msurtorile terestre
Transformri de date
O prim problem n combinarea datelor GPS cu date terestre este transformarea coordonatelor
geocentrice WGS84 n coordonate terestre. Sistemul terestru foloseste elipsoizi locali cum ar fi:
elipsoidul Clarke, eliposoidul GRS-80 (SUA), elipsoidul Bessel (Europa de Vest), elipsoidul Krasovski
(Europa de Est). Elipsoidul local este legat la un sistem de coordonate cartezian nongeocentric a crui
origine coincide cu centrul elipsoidului. Coordonatele plane , cum ar fi Gauss-Kruger sunt obtinute prin
proiectarea elipsoidului pe un plan.
Coordonatele GPS sunt notate cu indicele GPS, iar coordonatele terestre referite la un sistem
local sunt notate cu indicele LS. Astfel, observatiile GPS dau coordonatele , )
GPS
Z Y X , , . Coordonatele
plane locale , )
LS
y x, pot fi transformate cu ajutorul formulelor cu coeficienti constanti, cunoscute de la
Cartografia matematic, n coordonate elipsoidale , )
LS
L B, . Dac sunt cunoscute altitudinile
ortometrice si ondulatiile geoidului, atunci pot fi calculate altitudinile elipsoidale, obtinnd tripleta de
coordonate (B, L, h). Aceste coordonate pot fi transformate n coordonate carteziene , )
LS
Z Y X , , prin
(7.1).
Transformarea invers din , )
LS
Z Y X , , n , )
LS
y x, poate fi obtinut aplicnd (7.11) sau procedeul
iterativ. Proiectarea punctelor de pe suprafata elipsoidului pe un plan se realizeaz prin formule
cunoscute de la Cartografia matematic, nefiind nevoie de altitudini.
Transformri n spatiul tridimensional. Problema este de combina coordonatele , )
GPS
Z Y X , , si , )
LS
y x,
n spatiul tridimensional. Se poate observa detaliat n tabelul 7.1 si urmrind urmtorul algoritm:
Tabelul 7.1: Transformri GPS si date terestre n spatiul tridimensional si proiectarea lor ntr-un sistem plan
local.
WGS-84 geocentric Sistem local nongeocentric Observatii
elipsoid
Suprafata de referint, de ex:
Bessel, Clarke
, )
comune
puncte Z Y X
GPS
, ,
, )
LS
Z Y X , ,
Sunt determinati cei 7
parametrii ai transformrii
Helmert folosind punctele
comune
, )
parametrii 7 Z Y X
GPS
, ,
, )
LS
Z Y X , ,
Coordonatele WGS-84 sunt
transformate n sistem local
cu parametrii cunoscuti
, )
LS
h L B , ,
Coordonatele carteziene sunt
transformate n coordonate
elipsoidale (n functie de
fiecare elipsoid local)
, )
LS
L B,
Altitudinile sunt omise, deci
se consider suprafat de
coordonate
, )
LS
y x,
Proiectarea punctelor de pe
suprafata elipsoidului pe un
plan de referint ntr-un
sistem local
1. Transformarea , )
LS
y x, prin formulele cu coeficienti constanti, n , )
LS
L B, .
2. Pentru a completa coordonata punctului , )
LS
h L B , , trebuie cunoscute altitudinile elipsoidale.
CURS GEODEZIE SATELITARA
Capitolul 7. Transformri de coordonate pag.114
3. Transformarea , )
LS
h L B , , n , )
LS
Z Y X , , prin (7.1).
4. Coordonatele punctelor comune , )
GPS
Z Y X , , referite la WGS-84 si , )
LS
Z Y X , , referite la
sistemul local sunt folosite la determinarea celor 7 parametrii ai transformrii Helmert (7.17).
5. Coordonatele , )
GPS
Z Y X , , (referite la WGS84) pentru alte puncte dect cele comune pot fi
transfomate prin ecuatia (7.17) n , )
LS
Z Y X , , referite la un sistem local folosind parametrii de
transformare calculati n pasul anterior.
6. Toate coordonatele , )
LS
Z Y X , , pot fi transformate n , )
LS
h L B , , referite la un sistem local prin
(7.11) sau prin procedeul iterativ.
7. Omitnd altitudinile, punctele , )
LS
L B, de pe suprafata elipsoidului sunt proiectate pe un plan
prin formule cunoscute de la Cartografia matematic, rezultnd , )
LS
y x, ntr-un sistem local plan.
Acelasi tip de algoritm a fost prezentat si n Capitolul 4.3
Tabelul 7.1 este un tip de diagram pentru transformarea datelor GPS si terestre n spatiul
tridimensional si care reia cei mai importanti pasi ai procedurii descrise mai sus. De notat totusi c se
bazeaz pe ipoteza c punctele n sistem local utilizate ca puncte comune au si coordonate (X,Y,Z)
LS
.
n sistem local, un sistem de coordonate cartezian nongeocentric foloseste ca referint un elipsoid
(Bessel, Clarke, Krasovski). Pentru WGS-84 elipsoidul este omis intentionat deoarece este stiut oricum.
Avantajul abordrii tridimensionale este acela c nu se cer apriori cei 7 parametrii Helmert de
transformare. Aceasta nseamn c nu este necesar nici o informatie despre parametrii de translatie, de
scar sau de rotatie. Principalul dezavantaj al metodei este c se cer patru puncte n sistem local cu
altitudinea elipsoidal ( si deci ondulatiile geoidului). Totusi dup Schmitt (1991) efectul erorilor pe
altitudine al punctelor comune este neglijabil n coordonatele plane (x,y) si n coordonatele elipsoidale
(B,L). De exemplu, o altitudine eronat cu aproximativ 5 metri, produce ntr-o retea de 20x20 km. un
efect n coordonatele plane de 1 milimetru.
Exist mai multe combinatii n spatiul tridimensional. De mentionat un singur exemplu:
Schodlbauer (1989) obtine rezultate echivalente metodei descrise prin proiectarea coordonatelor GPS pe
un plan adoptnd altitudinea si realiznd o transformare afin tridimensional prin punctele comune.
Transformarea vectorilor liniilor de baz. Se trateaz aici transformarea coordonatelor GPS
ntr-un sistem local. Utilizatorii sunt interesati si n calcularea distantelor si unghiurilor (orizontale si
verticale) din vectorii liniilor de baz. Ca exemplu, se defineste vectorul liniei de baz dintre punctele
A si B notat cu b
AB
: distanta spatial s
AB
, azimutul elipsoidal A
AB
si distanta zenital elipsoidal
Z
AB
. Aceste cantitti sunt obtinute prin ecuatiile:
, ) , )
k b
j b i b
arctg Z
i b
j b
arctg A
b s
AB
2
AB
2
AB
AB
AB
AB
AB
AB AB
+
=
=
=
(7.31)
n care vectorii i, j, k sunt axele sistemului local de coordonate n acord cu ecuatia (7.-2). Cantittile
s
AB
, A
AB
, Z
AB
pot fi privite ca observatii neafectate de refractie si care trebuie, binenteles, s tin
cont de corelatiile dintre ele.
7.3.2. Compensarea
Aceast problem este tratat foarte pe scurt. Nu sunt date detalii despre matricea cofactorilor, matricea
de variant-covariant si legea de propagare a erorilor. Este ales un singur exemplu pentru a arta ct de
variate pot fi posibilittile de compensare.
CURS GEODEZIE SATELITARA
Capitolul 7. Transformri de coordonate pag.115
Formula pentru transformarea Helmert tridimensional este dat de ecuatia (7.17)
X R c X
T
+ = (7.32)
si arat interdependenta dintre cele dou sisteme. Continund cu coordonatele sistemului local LS si
coordonatele globale GPS relatia de mai sus devine:
LS GPS
X R c X + = (7.33)
Considernd amndou coordonatele sistemelor ca stocastice poate fi adugat foarte bine un
vector al perturbatiilor la X
GPS
si la X
LS
. Astfel relatia devine
, )
LS LS GPS GPS
n X R c n X + + = + (7.34)
si este denumit modelul Gauss-Helmert. Este avantajos pentru compensare s notm coordonatele
compensate ale sistemului local cu
LS LS LS
n X X
= + . Acest model este reformulat acum ca
LS GPS GPS
LS LS LS
X R c n X
X n X
+ = +
= +
(7.35)
si este denumit modelul Gauss-Markov. Aici, coordonatele compensate
LS
X
sunt folosite pe de o parte
ca observatii ale necunoscutelor si pe de alt parte ca necunoscute.
Formula de mai sus este modelul de baz care poate fi usor mrit prin alte observatii terestre.
Jager si van Mierlo (1991) adaug de exemplu msurtori terestre de unghiuri si distante. Adunnd
aceste observatii ntr-un vector l si adugnd perturbatiile corespunztoare, modelul de mai sus poate fi
suplimentat cu o ecuatie de tipul
LS LS
1 n 1 1 X :
= + .
n principiu poate fi implementat orice fel de msurtoare geodezic dac este folosit n
compensare un model geodezic de integrare. Ideea de baz este c orice msurtoare geodezic poate fi
exprimat ca o functie de unul sau mai multi vectori de pozitie X si a cmpului de gravitatie W al
Pmntului. De obicei, functia nelinear trebuie s fie linearizat acolo unde este o ruptur ntre
potentialul normal U al elipsoidului si potentialul perturbator T, astfel W = U + T. Prin aplicarea
principiului de minim se ajunge la formule de colocatie.
Se gsesc multe exemple de integrare GPS n publicatii de specialitate, de exemplu Heine
(1989): Integrare GPS si date de gravitatie; Heine (1990): Calcularea altitudinilor din combinatii GPSsi
date de gravitate; Grant (1988): ncercare de determinare a deformatiilor Pmntului din date GPS si
date terestre.
You might also like
- GPS - Global Positioning System-: Proiect Realizat De: Ciorogar Alexandru Grupa: 3111MDocument15 pagesGPS - Global Positioning System-: Proiect Realizat De: Ciorogar Alexandru Grupa: 3111MAlex CiorogarNo ratings yet
- Control Pendul InversDocument11 pagesControl Pendul InversBoanda Constantin GeorgeNo ratings yet
- Lucrare de DiplomăDocument59 pagesLucrare de DiplomăIon CanduNo ratings yet
- GalileoDocument9 pagesGalileoIustinian Alexandru MoneaNo ratings yet
- Relief RomaniaDocument10 pagesRelief RomaniaIoana Petre100% (1)
- Cursul 1-Sisteme Complementare Bazate Pe SatelitiDocument9 pagesCursul 1-Sisteme Complementare Bazate Pe SatelitiPaunescu Ioan-CosminNo ratings yet
- Baza Geodezica Si Matematica A HartilorDocument13 pagesBaza Geodezica Si Matematica A HartilorMariana CatanîNo ratings yet
- Calcule DrumuireDocument4 pagesCalcule DrumuireIonut Si DanielaNo ratings yet
- Radarul IstoricDocument2 pagesRadarul IstoricEu VictorNo ratings yet
- Bizhub-C360-C280-C220 Ghid Rapid RomanaDocument3 pagesBizhub-C360-C280-C220 Ghid Rapid RomanaLiviu PapadopolNo ratings yet
- Manual LPIS v. 8.0Document145 pagesManual LPIS v. 8.0gabyb67No ratings yet
- Masurarea Cantitatii Si Debitului de CombustibilDocument7 pagesMasurarea Cantitatii Si Debitului de CombustibilSorin ChitacuNo ratings yet
- ST Geo Tuzla Constanta 11.sistematizare PDFDocument80 pagesST Geo Tuzla Constanta 11.sistematizare PDFRoxana Chirica100% (1)
- Sistemul de Pozitionare GLONASSDocument3 pagesSistemul de Pozitionare GLONASSMihai LunguNo ratings yet
- Geotehnica - ICIVDocument5 pagesGeotehnica - ICIVAlina OpreanNo ratings yet
- Subiecte Geodezie An 3 UsamvbDocument1 pageSubiecte Geodezie An 3 UsamvbAndreea ManeaNo ratings yet
- VolteDocument4 pagesVolteKiss Andrea100% (1)
- Compensarea Puterii ReactiveDocument2 pagesCompensarea Puterii ReactiveRomeo GaborNo ratings yet
- Catalog Rezidential BILKADocument24 pagesCatalog Rezidential BILKAdoru nastaseNo ratings yet
- Normativ C 242 1993Document51 pagesNormativ C 242 1993Iulian Iordache100% (2)
- NORMATIV INTERSECŢII Redactareafin Comprimata PDFDocument125 pagesNORMATIV INTERSECŢII Redactareafin Comprimata PDFAlexandra Lungu ROAD DESIGNNo ratings yet
- Raportstiintific Fenomen de Tip Tsunami Marea NeagraDocument63 pagesRaportstiintific Fenomen de Tip Tsunami Marea NeagraAni PruiuNo ratings yet
- Manual Utilizare Aplicatia CADGen 3.0Document60 pagesManual Utilizare Aplicatia CADGen 3.0Sorin IsmailciucNo ratings yet
- Evaluarea Documentației de DivizDocument19 pagesEvaluarea Documentației de DivizRomeoNo ratings yet
- Analiza Statistica A Flotei MondialeDocument10 pagesAnaliza Statistica A Flotei MondialeNicole ZooNo ratings yet
- Intrebari GNSSDocument5 pagesIntrebari GNSSClaudia Cristina MagNo ratings yet
- Memoriu Tehnic Testare Borne Prin DGPSDocument66 pagesMemoriu Tehnic Testare Borne Prin DGPSSubaElemer-EmanuelNo ratings yet
- Aviz Apa NovaDocument2 pagesAviz Apa NovaAlexandra100% (1)
- Chiciura Pe LEA ITDocument7 pagesChiciura Pe LEA ITRazvan MaresNo ratings yet
- Combinarea Benzilor Spectrale - ReferatDocument4 pagesCombinarea Benzilor Spectrale - ReferatDima Andrei-MihaiNo ratings yet
- Solutii Management Parcare PDFDocument12 pagesSolutii Management Parcare PDFMaryus TNo ratings yet
- Curs Radio Partea 1-bDocument74 pagesCurs Radio Partea 1-bAlexandru FageteanuNo ratings yet
- Importanta Si Sarcinile CadastruluiDocument7 pagesImportanta Si Sarcinile CadastruluiMariaUiranrubNo ratings yet
- Memoriu JustificativDocument12 pagesMemoriu JustificativAlexandraNo ratings yet
- Capitolul 3 - Estimatori - Gauss MarkovDocument28 pagesCapitolul 3 - Estimatori - Gauss MarkovAvram Lucia AlexandraNo ratings yet
- Prescriptii Tehnice CNG ISCIRDocument116 pagesPrescriptii Tehnice CNG ISCIRgigibueNo ratings yet
- M11 INTRETINEREA DRUMURILOR Salvare CatalinDocument50 pagesM11 INTRETINEREA DRUMURILOR Salvare CatalinAlex PupazanNo ratings yet
- Contract Colectiv de Munca CN CF CFR SA 2012 2013Document135 pagesContract Colectiv de Munca CN CF CFR SA 2012 2013IoanNo ratings yet
- CP B.01.04-2009Document22 pagesCP B.01.04-2009Oprea VasileNo ratings yet
- Teorie 1Document83 pagesTeorie 1Gammaz1973No ratings yet
- Erori in Nivelmentul GeodezicDocument1 pageErori in Nivelmentul GeodezicMitrica AlexandraNo ratings yet
- Regulametul Cometitie Tir Cu ArculDocument6 pagesRegulametul Cometitie Tir Cu Arculdanu96No ratings yet
- Ordin M.T. 45-98 Norme Tehnice Proiectare, Constr. Moderniz DrumuriDocument3 pagesOrdin M.T. 45-98 Norme Tehnice Proiectare, Constr. Moderniz DrumuriMircea BobarNo ratings yet
- c10 EroriDocument23 pagesc10 EroriClaudiu OvidiuNo ratings yet
- WWW - Referat.ro Geodezie SatelitaraDocument19 pagesWWW - Referat.ro Geodezie SatelitaraPop BogdanNo ratings yet
- Curs 2Document10 pagesCurs 2Buciuman MariusNo ratings yet
- Probleme de Mediu in Judetul CalarasiDocument10 pagesProbleme de Mediu in Judetul CalarasiParcalabu Dasa DanielaNo ratings yet
- STUDIU GEOTEHNIC PietrariDocument19 pagesSTUDIU GEOTEHNIC PietrariOdi IvonaNo ratings yet
- Sistematizarea Verticală A Unui Cartier - MemoriuDocument10 pagesSistematizarea Verticală A Unui Cartier - MemoriuPál OsváthNo ratings yet
- Tematica Examen!Document39 pagesTematica Examen!Alexandra ComșaNo ratings yet
- Global Positioning System: Poziționare Globală Prescurtat GPS) Este Un Sistem Global de NavigațieDocument13 pagesGlobal Positioning System: Poziționare Globală Prescurtat GPS) Este Un Sistem Global de NavigațieAndrei AndreiuTzNo ratings yet
- Instrumente TopograficeDocument11 pagesInstrumente TopograficeNoris LobontiuNo ratings yet
- Gmi ReferatDocument28 pagesGmi ReferatAndreea Denisa Milu100% (1)
- CUPRINSDocument38 pagesCUPRINSAna LeuNo ratings yet
- Manual Lgo Si Trimble 4800 Pt. Postprocesare Mas. StaticaDocument44 pagesManual Lgo Si Trimble 4800 Pt. Postprocesare Mas. StaticaMihai GalNo ratings yet
- Gps PadureDocument7 pagesGps PadureBura AlexandruNo ratings yet
- Curs GPSDocument280 pagesCurs GPSRaul RtNo ratings yet
- Cornel Paunescu, Sorin Dimitriu, Victor Mocanu - Curs GPSDocument116 pagesCornel Paunescu, Sorin Dimitriu, Victor Mocanu - Curs GPSOctavian Ciuculescu100% (1)
- Curs GPSDocument117 pagesCurs GPSMihaela Sandu0% (1)
- Cornel Pãunescu, Sorin Dimitriu, Victor Mocanu - Curs GPSDocument114 pagesCornel Pãunescu, Sorin Dimitriu, Victor Mocanu - Curs GPSBlidar AvramNo ratings yet
- Ce Sunt Serviciile Windows, Ce Fac Ele Și Cum Le AdministrămDocument6 pagesCe Sunt Serviciile Windows, Ce Fac Ele Și Cum Le Administrămseitan_calinNo ratings yet
- Noi Tehnologii de Transmisie A Datelor Prin SatelitDocument16 pagesNoi Tehnologii de Transmisie A Datelor Prin Satelitseitan_calinNo ratings yet
- Multiplexare - CrispediaDocument8 pagesMultiplexare - Crispediaseitan_calinNo ratings yet
- Functia LogaritmicaDocument19 pagesFunctia Logaritmicaseitan_calinNo ratings yet
- Bandă LargăDocument2 pagesBandă Largăseitan_calinNo ratings yet
- Porturile Unui CalculatorDocument16 pagesPorturile Unui Calculatorseitan_calinNo ratings yet
- Transmisiide Date in Baza de Date Si Cu Modularea Unui PurtatorDocument63 pagesTransmisiide Date in Baza de Date Si Cu Modularea Unui Purtatorseitan_calinNo ratings yet
- Noi Tehnologii de Transmisie A Datelor Prin SatelitDocument16 pagesNoi Tehnologii de Transmisie A Datelor Prin Satelitseitan_calinNo ratings yet
- Curs Comunicatii MobileDocument313 pagesCurs Comunicatii Mobileseitan_calin100% (1)
- Transmisiide Date in Baza de Date Si Cu Modularea Unui PurtatorDocument63 pagesTransmisiide Date in Baza de Date Si Cu Modularea Unui Purtatorseitan_calinNo ratings yet
- Functia Logaritmica - FieDocument1 pageFunctia Logaritmica - Fieseitan_calinNo ratings yet
- Cum Se Calculează Numărul PI - Cum Se FaceDocument1 pageCum Se Calculează Numărul PI - Cum Se Faceseitan_calinNo ratings yet
- Clase Speciale de Functii Reale de VariaDocument130 pagesClase Speciale de Functii Reale de VariaAndreeaChiricescuNo ratings yet
- Fizica SoliduluiDocument42 pagesFizica SoliduluiVictor BlanaruNo ratings yet
- Curs 8Document16 pagesCurs 8Asavei GianinaNo ratings yet
- Electric 2cDocument13 pagesElectric 2cAndrei Petru ParvNo ratings yet
- Sisteme de ReferintaDocument32 pagesSisteme de Referintaseitan_calinNo ratings yet
- Cap 10Document139 pagesCap 10micumarianNo ratings yet
- Polarizarea Undelor ElectromagneticeDocument3 pagesPolarizarea Undelor Electromagneticeseitan_calinNo ratings yet
- Analiza SemnalelorDocument120 pagesAnaliza Semnalelorseitan_calinNo ratings yet
- Circuite IntegrateDocument22 pagesCircuite Integrateseitan_calinNo ratings yet
- Materiale DielectriceDocument18 pagesMateriale Dielectriceseitan_calinNo ratings yet
- 01 - Circuite Cu Componente Electronice Analogice IDocument42 pages01 - Circuite Cu Componente Electronice Analogice I'Serban Nicusor100% (1)
- Na Vig Are Electronic ADocument34 pagesNa Vig Are Electronic AAndrei SzilagyiNo ratings yet
- Curs AmDocument80 pagesCurs Amseitan_calinNo ratings yet
- Satelitii ArtDocument3 pagesSatelitii Artseitan_calinNo ratings yet
- Proiectarea Memoriei RAMDocument5 pagesProiectarea Memoriei RAMseitan_calinNo ratings yet
- Curs 03Document8 pagesCurs 03Adrian TudorNo ratings yet
- Descrierea Generala A Unui Ruter PDFDocument22 pagesDescrierea Generala A Unui Ruter PDFserafimvaNo ratings yet
- 01 - Circuite Cu Componente Electronice Analogice IDocument42 pages01 - Circuite Cu Componente Electronice Analogice I'Serban Nicusor100% (1)