You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- AEC Guide for Design Response Spectra of Nuclear Power PlantsDocument7 pagesAEC Guide for Design Response Spectra of Nuclear Power PlantstingpaduNo ratings yet
- Cn1749156a Arc Method For Synthesizing Controllable Single Wall Carbon Nano TubeDocument7 pagesCn1749156a Arc Method For Synthesizing Controllable Single Wall Carbon Nano TubeelsaordunaNo ratings yet
- Combined PDFDocument527 pagesCombined PDFelsaordunaNo ratings yet
- CFR 2012 Title10 Vol1 Part50 Appb PDFDocument5 pagesCFR 2012 Title10 Vol1 Part50 Appb PDFelsaordunaNo ratings yet
- 7.5 02 07 03.9Document17 pages7.5 02 07 03.9elsaordunaNo ratings yet
- Pub1159 WebDocument115 pagesPub1159 WebRodolfo RodriguezNo ratings yet
- España AieDocument14 pagesEspaña AieelsaordunaNo ratings yet
- 7.5 01 03 03Document18 pages7.5 01 03 03elsaordunaNo ratings yet
- Pub1157 - Web Periodic Safety ReviewDocument62 pagesPub1157 - Web Periodic Safety ReviewelsaordunaNo ratings yet
- 7.5 02 07 03.9Document17 pages7.5 02 07 03.9elsaordunaNo ratings yet
- CN 103293186Document11 pagesCN 103293186elsaordunaNo ratings yet
- Epri TR1002159Document214 pagesEpri TR1002159elsaordunaNo ratings yet
- HVDCDocument30 pagesHVDCelsaordunaNo ratings yet
- CN 103293186Document11 pagesCN 103293186elsaordunaNo ratings yet
- Transmission Level HTS Fault Current Limiter Design ProgressDocument22 pagesTransmission Level HTS Fault Current Limiter Design ProgresselsaordunaNo ratings yet
- Us8455145b2 - Arturo Solis H - Photoelectrochemical MethodDocument8 pagesUs8455145b2 - Arturo Solis H - Photoelectrochemical MethodelsaordunaNo ratings yet
- Us 2011002774 A 1Document13 pagesUs 2011002774 A 1elsaordunaNo ratings yet
- Method for Total Monitoring Online Health of GeneratorsDocument20 pagesMethod for Total Monitoring Online Health of GeneratorselsaordunaNo ratings yet
- Kr101035496 System For Total Monitering On-Line Health of The GeneratorDocument18 pagesKr101035496 System For Total Monitering On-Line Health of The GeneratorelsaordunaNo ratings yet
- Pub1376 - Web Severe AccidentDocument83 pagesPub1376 - Web Severe AccidentelsaordunaNo ratings yet
- CN202230145 Distribution Transformer Remote Wireless Monitoring SystemDocument4 pagesCN202230145 Distribution Transformer Remote Wireless Monitoring SystemelsaordunaNo ratings yet
- ART - Reinjection Into Geothermal ReservoirsDocument21 pagesART - Reinjection Into Geothermal ReservoirselsaordunaNo ratings yet
- Kr20130041572 Complex Condition Diagnosis Device and Method For Induction Motor Using On-Line TechniqueDocument15 pagesKr20130041572 Complex Condition Diagnosis Device and Method For Induction Motor Using On-Line TechniqueelsaordunaNo ratings yet
- Kr101035496 System For Total Monitering On-Line Health of The GeneratorDocument18 pagesKr101035496 System For Total Monitering On-Line Health of The GeneratorelsaordunaNo ratings yet
- CN101294856 Transformer Device On-Line Multi-Parameter Monitoring Device Based On Optical Fiber Sensor TechnologyDocument7 pagesCN101294856 Transformer Device On-Line Multi-Parameter Monitoring Device Based On Optical Fiber Sensor TechnologyelsaordunaNo ratings yet
- CN102543422 Technology For Improving Insulation Resistance of Dry Transformer Iron Core and Online MonitoringDocument6 pagesCN102543422 Technology For Improving Insulation Resistance of Dry Transformer Iron Core and Online MonitoringelsaordunaNo ratings yet
- Chapter 3 Phasor Estimation at Off-Nominal PDFDocument31 pagesChapter 3 Phasor Estimation at Off-Nominal PDFelsaordunaNo ratings yet
- Transfomer FmeaDocument58 pagesTransfomer FmeaPartha Sarathi GangulyNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Publications FireSafetyDesign SDocument369 pagesPublications FireSafetyDesign SJayachandra Reddy AnnavaramNo ratings yet
- Liu030 Nepal Bans Solo Mountain ClimbersDocument2 pagesLiu030 Nepal Bans Solo Mountain Climberssanti.miranda.parrillaNo ratings yet
- Government of The Punjab Primary & Secondary Healthcare DepartmentDocument3 pagesGovernment of The Punjab Primary & Secondary Healthcare DepartmentYasir GhafoorNo ratings yet
- Data Sheet FC SIDocument2 pagesData Sheet FC SIAndrea AtzeniNo ratings yet
- Modification Adjustment During Upgrade - Software Logistics - SCN WikiDocument4 pagesModification Adjustment During Upgrade - Software Logistics - SCN Wikipal singhNo ratings yet
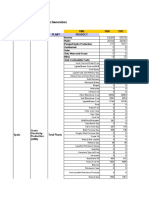
- Hotels Cost ModelDocument6 pagesHotels Cost ModelThilini SumithrarachchiNo ratings yet
- AI Search Iterative DeepeningDocument4 pagesAI Search Iterative DeepeningNirjal DhamalaNo ratings yet
- NRSPDocument27 pagesNRSPMuhammad Farhan67% (3)
- American Woodworker No 171 April-May 2014Document76 pagesAmerican Woodworker No 171 April-May 2014Darius White75% (4)
- Eating and HealingDocument19 pagesEating and HealingMariana CoriaNo ratings yet
- Culinary Nutrition BasicsDocument28 pagesCulinary Nutrition BasicsLIDYANo ratings yet
- Sheet (1) : An Iron Ring Has A Cross-Sectional Area of 3 CMDocument2 pagesSheet (1) : An Iron Ring Has A Cross-Sectional Area of 3 CMKhalifa MohamedNo ratings yet
- Classification of Methods of MeasurementsDocument60 pagesClassification of Methods of MeasurementsVenkat Krishna100% (2)
- Galley cleaning hazards and controlsDocument9 pagesGalley cleaning hazards and controlsRosalie RosalesNo ratings yet
- EGMM - Training Partner MOUDocument32 pagesEGMM - Training Partner MOUShaik HussainNo ratings yet
- PLJ-8LED Manual Translation enDocument13 pagesPLJ-8LED Manual Translation enandrey100% (2)
- KCL Thesis PrintingDocument4 pagesKCL Thesis PrintingMelinda Watson100% (2)
- Issue 189Document38 pagesIssue 189Oncampus.net100% (1)
- PH Miracle Complete Whole Body Alkalizing Program-1201724Document20 pagesPH Miracle Complete Whole Body Alkalizing Program-1201724joao carlos100% (1)
- Exercise C: Cocurrent and Countercurrent FlowDocument6 pagesExercise C: Cocurrent and Countercurrent FlowJuniorNo ratings yet
- Lec 5Document22 pagesLec 5Abcdefgh EfghabcdNo ratings yet
- Ace3 1122.03 GB PDFDocument16 pagesAce3 1122.03 GB PDFArpit VermaNo ratings yet
- Imp RssDocument8 pagesImp RssPriya SharmaNo ratings yet
- Appendix B, Profitability AnalysisDocument97 pagesAppendix B, Profitability AnalysisIlya Yasnorina IlyasNo ratings yet
- The Collected Letters of Flann O'BrienDocument640 pagesThe Collected Letters of Flann O'BrienSean MorrisNo ratings yet
- Module 7 - Assessment of Learning 1 CoursepackDocument7 pagesModule 7 - Assessment of Learning 1 CoursepackZel FerrelNo ratings yet
- Illegal FishingDocument1 pageIllegal FishingDita DwynNo ratings yet
- An RNA Vaccine Drives Expansion and Efficacy of claudin-CAR-T Cells Against Solid TumorsDocument9 pagesAn RNA Vaccine Drives Expansion and Efficacy of claudin-CAR-T Cells Against Solid TumorsYusuf DemirNo ratings yet
- 6a. ICMR STSDocument15 pages6a. ICMR STSVishnu Praba ANo ratings yet
- Design of Steel Structures Handout 2012-2013Document3 pagesDesign of Steel Structures Handout 2012-2013Tushar Gupta100% (1)