You might also like
- WIFI LoRa 32 V2 (868-915)Document1 pageWIFI LoRa 32 V2 (868-915)Pablo Parreño100% (1)
- Mounting Pad Relay CircuitDocument1 pageMounting Pad Relay CircuitNgọc Hưng TạNo ratings yet
- Power Supplies: VIN +12V, VOUT +5V, IOUT Upto 500 Ma VIN +12V, VOUT +7V, IOUT Upto 300 MaDocument6 pagesPower Supplies: VIN +12V, VOUT +5V, IOUT Upto 500 Ma VIN +12V, VOUT +7V, IOUT Upto 300 MaStef GaudreauNo ratings yet
- Aux Power Supply Circuit Diagram SYSTEM 8000 Aux Power Supply Circuit Diagram SYSTEM 8000 Aux Power Supply Circuit Diagram SYSTEM 8000Document1 pageAux Power Supply Circuit Diagram SYSTEM 8000 Aux Power Supply Circuit Diagram SYSTEM 8000 Aux Power Supply Circuit Diagram SYSTEM 8000Dea NafitasariNo ratings yet
- Muscle Spikerbox V1.21Document1 pageMuscle Spikerbox V1.21Abubakar SiddiqueNo ratings yet
- Analog Isolation Module (V1.0) SchematicDocument1 pageAnalog Isolation Module (V1.0) Schematicbokic88100% (2)
- Cau H KHTDocument1 pageCau H KHTBảo NguyễnNo ratings yet
- VCC voltage regulator circuit diagram with LED indicatorsDocument1 pageVCC voltage regulator circuit diagram with LED indicatorsHAE MURINo ratings yet
- CVMV26L-G Schematic DiagramDocument6 pagesCVMV26L-G Schematic DiagrambelajartvkuNo ratings yet
- H-Buster HBTV22D02FDDocument9 pagesH-Buster HBTV22D02FDEulerMartinsDeMelloNo ratings yet
- MC2100 Rev Engrd PDFDocument1 pageMC2100 Rev Engrd PDFMaria VochinNo ratings yet
- Future: Want Program Programmer That Programmer Unit's of inDocument9 pagesFuture: Want Program Programmer That Programmer Unit's of indinotronNo ratings yet
- Samyung Enc Co.,Ltd.: Fishfinder InterfaceDocument1 pageSamyung Enc Co.,Ltd.: Fishfinder InterfacejasonelectronicsphilNo ratings yet
- Class D IR2110 SCHDocument1 pageClass D IR2110 SCHMr.Mongkhon J.No ratings yet
- TOPHOUSE - KONKA KDL32MD662LN - Diagrama Placa Única Principal y Fuente.Document13 pagesTOPHOUSE - KONKA KDL32MD662LN - Diagrama Placa Única Principal y Fuente.manuel cordobaNo ratings yet
- SchemDocument1 pageSchemCaexvenNo ratings yet
- LTC4006EGN-6, 8.4V2A Li-Ion Battery Charger PDFDocument1 pageLTC4006EGN-6, 8.4V2A Li-Ion Battery Charger PDFAndyNo ratings yet
- 科瑞康心电监护胎监数字板板线路图Document1 page科瑞康心电监护胎监数字板板线路图wendongNo ratings yet
- ARRL Radio Receiver (Item No - 2528) Schematic V0 - 4Document1 pageARRL Radio Receiver (Item No - 2528) Schematic V0 - 4marcelo.ceeeNo ratings yet
- HBTV-32D01 Principal PDFDocument10 pagesHBTV-32D01 Principal PDFAdenilton L de AndradeNo ratings yet
- 220 V Encoder: Kabel Power SupplyDocument1 page220 V Encoder: Kabel Power Supplylukmanul hakimNo ratings yet
- DC Motor ControlDocument1 pageDC Motor ControlDebashishParidaNo ratings yet
- Interface Carte Nucleo - STM32F446RE Potentiomètres: PC1 PC0Document1 pageInterface Carte Nucleo - STM32F446RE Potentiomètres: PC1 PC0Abdessamad houssainiNo ratings yet
- Aux Power - RevBDocument1 pageAux Power - RevBKornélIllyésNo ratings yet
- PLC S5 CableDocument1 pagePLC S5 CableNguyen TranNo ratings yet
- WIFI Kit 32 Schematic Diagram V2Document1 pageWIFI Kit 32 Schematic Diagram V2Miguel Caldas100% (2)
- WIFI Kit 32 Schematic Diagram V2Document1 pageWIFI Kit 32 Schematic Diagram V2Jose M. Paredes100% (2)
- Esquema Eletrico MX1024Document1 pageEsquema Eletrico MX1024Gabriel de LimaNo ratings yet
- Hisense Led32t28kv LCD TV Drawing Board SCHDocument7 pagesHisense Led32t28kv LCD TV Drawing Board SCHpyhackNo ratings yet
- Control Unit Schematic Pulse Oximeter: TitleDocument2 pagesControl Unit Schematic Pulse Oximeter: TitleJoel De Conto100% (1)
- Previo 07 CompletoDocument2 pagesPrevio 07 CompletoRomeo Hernandez VillaNo ratings yet
- PIC P28 USB - SCHDocument1 pagePIC P28 USB - SCHTiago RamosNo ratings yet
- HV100 PwrAmp-Sche - RevBDocument1 pageHV100 PwrAmp-Sche - RevBSzabo Mihai-PaulNo ratings yet
- DIY Particle Detector Schematic v1-2Document1 pageDIY Particle Detector Schematic v1-2Rafael Carmo100% (1)
- Clap CKTDocument2 pagesClap CKTMunavir k100% (1)
- Catalex-Micro-SD-Card-Module-SCH ModificadoDocument1 pageCatalex-Micro-SD-Card-Module-SCH ModificadoBabobrillNo ratings yet
- +VB +VCC: Microlab Technology IncDocument1 page+VB +VCC: Microlab Technology IncIgor MNo ratings yet
- Wireless Shell Reference Hardware DesignDocument1 pageWireless Shell Reference Hardware DesignBrentNo ratings yet
- Goldmund Mimesis 3 Clone Draft With ProtectionDocument1 pageGoldmund Mimesis 3 Clone Draft With ProtectionPeterNo ratings yet
- 108b-6Document1 page108b-6Nathalis CortexNo ratings yet
- Circuit diagram analysisDocument1 pageCircuit diagram analysisTrần Ngọc KhiêmNo ratings yet
- Power supply schematicDocument1 pagePower supply schematicMontecarloNo ratings yet
- Ciim00009 (DDC112) - DDC112Document2 pagesCiim00009 (DDC112) - DDC112ZXNo ratings yet
- ModifiedDocument1 pageModifiedGayathri YaddalaNo ratings yet
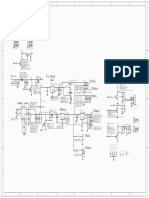
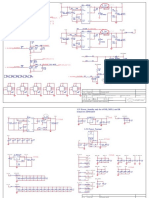
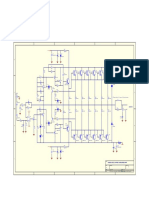
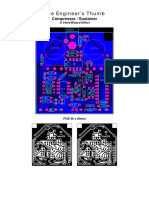
- The Engineer's Thumb: Compressor / SustainerDocument6 pagesThe Engineer's Thumb: Compressor / SustainerCarlos RuizNo ratings yet
- SHC Uart Sac24100Document2 pagesSHC Uart Sac24100bui thuy100% (1)
- Power Control: +1.10V - VDDCDocument10 pagesPower Control: +1.10V - VDDCdami pelNo ratings yet
- +VCC - VCC: Fuse 100-120V F0.5/250V 220-240V F0.5/250VDocument1 page+VCC - VCC: Fuse 100-120V F0.5/250V 220-240V F0.5/250Vpmaldona93No ratings yet
- Schematic Diagrams: 11-1 Main Circuit DiagramDocument14 pagesSchematic Diagrams: 11-1 Main Circuit Diagramcristopherg_9No ratings yet
- SchematicDocument1 pageSchematicToky RakotonirinaNo ratings yet
- l6599 by Res 3Document1 pagel6599 by Res 3Deepak AnandNo ratings yet
- Konka KDL32MD662LN MSD6486 BGH Ble3218rtxDocument12 pagesKonka KDL32MD662LN MSD6486 BGH Ble3218rtxpedro100% (1)
- Schematic - WIFI Wall Switch 2 WayDocument1 pageSchematic - WIFI Wall Switch 2 WayMarius MihaiNo ratings yet
- Homepage for DIY Programmer PCB: Curtis ProgrammerDocument1 pageHomepage for DIY Programmer PCB: Curtis ProgrammerPedro Militao CoboNo ratings yet
- Diagrama EsquemáticoDocument2 pagesDiagrama EsquemáticoJuan Sebastian GiraldoNo ratings yet
- D6 R29 40VAC1 OFFSET NULL CIRCUIT DIAGRAMDocument1 pageD6 R29 40VAC1 OFFSET NULL CIRCUIT DIAGRAMPeterNo ratings yet
- Deloitte Au Tech Marathon Case Study 171215Document2 pagesDeloitte Au Tech Marathon Case Study 171215shivangiNo ratings yet
- As ISO 16106-2007 Transport Packages For Dangerous Goods - Dangerous Goods Packagings Intermediate Bulk ContaDocument10 pagesAs ISO 16106-2007 Transport Packages For Dangerous Goods - Dangerous Goods Packagings Intermediate Bulk ContaSAI Global - APACNo ratings yet
- GEO ExitManagementSystemDocument7 pagesGEO ExitManagementSystemgvspavanNo ratings yet
- Transocean v. MaerskDocument31 pagesTransocean v. MaerskFrank BednarzNo ratings yet
- The Three Fs and Five Cs - Mondelēz's New Marketing ApproachDocument8 pagesThe Three Fs and Five Cs - Mondelēz's New Marketing ApproachSuzana NikolovskaNo ratings yet
- SAP Community TagsDocument189 pagesSAP Community TagsmsandeeprajaNo ratings yet
- THE CONTEMPORARY WORLD - Unit 1 (Lesson1 - Globalization Defined)Document11 pagesTHE CONTEMPORARY WORLD - Unit 1 (Lesson1 - Globalization Defined)Jessica Aguila-Sanchez86% (7)
- Just Dial...Document24 pagesJust Dial...Prince PrinceNo ratings yet
- Accounting Cycle in Service CompanyDocument2 pagesAccounting Cycle in Service CompanyGusti AyuNo ratings yet
- PWX 101 (CDC) GuideForLinux (UNIX) AndWindows en PDFDocument298 pagesPWX 101 (CDC) GuideForLinux (UNIX) AndWindows en PDFArun Kumar CgNo ratings yet
- ISO 17065 NotesDocument36 pagesISO 17065 Notesnene_jmlNo ratings yet
- Chapter 1 - Make It Stick The Science of Successful LearningDocument22 pagesChapter 1 - Make It Stick The Science of Successful Learningismatmasri1817100% (2)
- Keychain PasswordsDocument5 pagesKeychain Passwordsbamby361976No ratings yet
- Letter of Consent (Where The Proprietor of The Cited Mark Is A Company)Document4 pagesLetter of Consent (Where The Proprietor of The Cited Mark Is A Company)Ronith Kapaw-an BocNo ratings yet
- Leading in the 21st Century: How Strategic Vision and Empowering Employees Will Define New LeadershipDocument17 pagesLeading in the 21st Century: How Strategic Vision and Empowering Employees Will Define New LeadershipMikeGrabillNo ratings yet
- Email List 50 Companies Provided by AsDocument6 pagesEmail List 50 Companies Provided by AsSuchdeo Kapil100% (2)
- Marketing PlanDocument13 pagesMarketing PlanJunJae100% (1)
- Shelter Partnership2Document2 pagesShelter Partnership2Raj GuptaNo ratings yet
- Service Industry Mini Project Report: Final Report: (The Following Questions Need To Be Answered in The Report)Document1 pageService Industry Mini Project Report: Final Report: (The Following Questions Need To Be Answered in The Report)vikas joshiNo ratings yet
- Quote Template 05Document17 pagesQuote Template 05Sourabh GoyalNo ratings yet
- Incruises Compensation Plan Overview Brochure Letter enDocument28 pagesIncruises Compensation Plan Overview Brochure Letter enmiguel100% (1)
- Auditing The Consequences of Rework Construction PDFDocument12 pagesAuditing The Consequences of Rework Construction PDFfarhanNo ratings yet
- Call'sDocument77 pagesCall'sJoseph JonesNo ratings yet
- Resume - Travis MesserschmidtDocument1 pageResume - Travis Messerschmidtapi-480546510No ratings yet
- Sample Franchise AgreementDocument27 pagesSample Franchise AgreementAmit Talada100% (1)
- Fado, para Piano e Canto / Por Raul de Campos Letra de Affonso DuarteDocument5 pagesFado, para Piano e Canto / Por Raul de Campos Letra de Affonso DuartedsuyentorNo ratings yet
- Zacks API UserGuideDocument68 pagesZacks API UserGuidesmughal13No ratings yet
- Apps Make Semantic Web A Reality-2005Document2 pagesApps Make Semantic Web A Reality-2005Amit ShethNo ratings yet
- Franchising in MalaysiaDocument6 pagesFranchising in MalaysiaTOP C100% (4)
- Contes de Pays de MerlinDocument195 pagesContes de Pays de MerlinAnonymous TNaPN570No ratings yet