You might also like
- Apostila Controle - 21 - Avanço e AtrasoDocument32 pagesApostila Controle - 21 - Avanço e Atrasolnery_1No ratings yet
- Apostila Controle - 18 - Estabilidade Relativa (MG, MF)Document26 pagesApostila Controle - 18 - Estabilidade Relativa (MG, MF)lnery_1No ratings yet
- Apostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)Document21 pagesApostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)lnery_1No ratings yet
- Apostila Controle - 08 - Sensores e AtuadoresDocument32 pagesApostila Controle - 08 - Sensores e Atuadoreslnery_1No ratings yet
- Apostila Controle - 05 - Sistemas FluídicosDocument44 pagesApostila Controle - 05 - Sistemas Fluídicoslnery_1100% (1)
- Apostila Controle - 03 - Função de Transferência e Diagrama de BlocosDocument35 pagesApostila Controle - 03 - Função de Transferência e Diagrama de Blocoslnery_1No ratings yet
- Apostila Controle - 02 - Transformada de LaplaceDocument28 pagesApostila Controle - 02 - Transformada de Laplacelnery_1No ratings yet
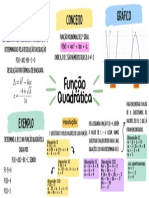
- Função Quadrática MAPA MENTAL!!Document1 pageFunção Quadrática MAPA MENTAL!!Ruan ChristianNo ratings yet
- Equação CúbicaDocument16 pagesEquação CúbicaIsabelHutterNo ratings yet
- Equações Diferenciais 1 OrdemDocument30 pagesEquações Diferenciais 1 OrdemMiguel Ernesto FocasNo ratings yet
- Lista de Exercícios - Equacao Do 2 GrauDocument20 pagesLista de Exercícios - Equacao Do 2 Grausouza.renatomeloNo ratings yet
- Questões de Raciocinio LogicoDocument3 pagesQuestões de Raciocinio LogicoSPI CINTNo ratings yet
- Equacao Do 1 GrauDocument5 pagesEquacao Do 1 GrauJorge ProfNo ratings yet
- Geometria Analítica Parte 04Document2 pagesGeometria Analítica Parte 04sergio josimarNo ratings yet
- NOME Pesquisadetema5Document11 pagesNOME Pesquisadetema5Arthur BernardoNo ratings yet
- Resumo - Sistemas Lineares PDFDocument4 pagesResumo - Sistemas Lineares PDFMagnoNo ratings yet
- Problema de Condução Transiente de Calor Pelo Método Dos Volumes Finitos Usando O Método de Crank-NicolsonDocument4 pagesProblema de Condução Transiente de Calor Pelo Método Dos Volumes Finitos Usando O Método de Crank-NicolsonRenilson MedeirosNo ratings yet
- Ajustamento de Poligonais Pelo Modelo de Condição Ou CorrelatosDocument9 pagesAjustamento de Poligonais Pelo Modelo de Condição Ou CorrelatosengtlrodriguesNo ratings yet
- EDOs 2 Ordem - Caso Não HomogêneoDocument20 pagesEDOs 2 Ordem - Caso Não HomogêneovicroNo ratings yet
- Exercicio de Sistama Linear RaniereDocument11 pagesExercicio de Sistama Linear RaniereJoseramiereNo ratings yet
- Módulo Equação Do Segundo GrauDocument10 pagesMódulo Equação Do Segundo GrauCarla RoviraNo ratings yet
- Calculo Numerico - Leila Zardo Puga, Rubener Da Silva Freitas, Alvaro Puga Paz e Helio Giacomini - OCRDocument133 pagesCalculo Numerico - Leila Zardo Puga, Rubener Da Silva Freitas, Alvaro Puga Paz e Helio Giacomini - OCRQue GreenNo ratings yet
- MTM Aula 10 - d24 - EstudanteDocument1 pageMTM Aula 10 - d24 - EstudantecarolinasousagusmaoNo ratings yet
- Not - Answered - Matematica - Equacao e Funcao Do Primeiro Grau - Funcao AfimDocument15 pagesNot - Answered - Matematica - Equacao e Funcao Do Primeiro Grau - Funcao AfimIsaac BatistaoNo ratings yet
- Notas de Aula de EDB - Rodney J. Biezuner - Iedp-2-RodneyDocument211 pagesNotas de Aula de EDB - Rodney J. Biezuner - Iedp-2-RodneyVictorNo ratings yet
- Apostila de Matematica 14 E28093 Sistemas Lineares PDFDocument4 pagesApostila de Matematica 14 E28093 Sistemas Lineares PDFFernando LimaNo ratings yet
- Exercicios Descritor 9Document2 pagesExercicios Descritor 9Aucicleia NunesNo ratings yet
- 4 - Equações de Primerio GrauDocument16 pages4 - Equações de Primerio GrauJessica EllenNo ratings yet
- Matriz de Matemática 9º AnoDocument8 pagesMatriz de Matemática 9º AnoDiogo Alexandre100% (1)
- Várias Questões AV BDQ Cálculo IIIDocument7 pagesVárias Questões AV BDQ Cálculo IIIPedro Heitor Venturini LinharesNo ratings yet
- Simulado 1 - Equacao de 2 Grau e SistemasDocument4 pagesSimulado 1 - Equacao de 2 Grau e SistemasDivane SoaresNo ratings yet
- DEMA0151 Rep1 2019008446Document5 pagesDEMA0151 Rep1 2019008446Jacielly GuerraNo ratings yet
- Estudos Disciplinares - DS - 9 SEMESTREDocument7 pagesEstudos Disciplinares - DS - 9 SEMESTRESylvio Augusto100% (1)
- Cap 8 - Método de Rayleigh-RitzDocument24 pagesCap 8 - Método de Rayleigh-RitzhlsmonteiroNo ratings yet
- Trigonometria 5Document19 pagesTrigonometria 5snakethzNo ratings yet
- Darcy Vs FanningDocument20 pagesDarcy Vs FanningMaiza Raphael CunhaNo ratings yet