You might also like
- Tugas Analisis SistemDocument10 pagesTugas Analisis SistemKeiko AzizahNo ratings yet
- Lab 1Document13 pagesLab 1Aman GargNo ratings yet
- Name Roll Number Section Submitted To Date: Muhammad Haseeb Ahsan 16F-8351 A1 Sir Shahi Dost 26/11/2016Document16 pagesName Roll Number Section Submitted To Date: Muhammad Haseeb Ahsan 16F-8351 A1 Sir Shahi Dost 26/11/2016Muhammad Haseeb AhsanNo ratings yet
- Compiler Asses3Document13 pagesCompiler Asses3Aswath VikranthNo ratings yet
- Tugas Pemrograman Komputer Dalam Sistem Tenaga: Jurusan Teknik Elektro Fakultas Teknik Universitas Andalas Padang 2013Document9 pagesTugas Pemrograman Komputer Dalam Sistem Tenaga: Jurusan Teknik Elektro Fakultas Teknik Universitas Andalas Padang 2013Joni FernandoNo ratings yet
- Taller 14 Punto 13: #Include #IncludeDocument7 pagesTaller 14 Punto 13: #Include #IncludeLUISA ACOSTA RODRIGUEZNo ratings yet
- SimboluriDocument12 pagesSimboluriemiemiolteanNo ratings yet
- Ada Lab FileDocument26 pagesAda Lab FileSHIVCHARAN SHARMANo ratings yet
- 5 CDocument8 pages5 CSHYAMNo ratings yet
- Name: Jaydev Jadav B. Roll No: 032Document7 pagesName: Jaydev Jadav B. Roll No: 032jay jadavNo ratings yet
- Name: Jaydev Jadav B. Roll No: 032Document7 pagesName: Jaydev Jadav B. Roll No: 032jay jadavNo ratings yet
- Computer Aided Structural Analysis CS 520A: Gonzales, John Carlo BDocument19 pagesComputer Aided Structural Analysis CS 520A: Gonzales, John Carlo BJohnCarloBernardoNo ratings yet
- 20BCE0130 PbSheet1.1 1.1.2 PDFDocument17 pages20BCE0130 PbSheet1.1 1.1.2 PDFAnkit SinghNo ratings yet
- (Q. 1) Write A Program To Find The N Root of A Number by Newton Raphson MethodDocument8 pages(Q. 1) Write A Program To Find The N Root of A Number by Newton Raphson MethodAbishake KoulNo ratings yet
- ASLKDDocument12 pagesASLKDemiemiolteanNo ratings yet
- Using Namespace Int Int: #Include #Include #IncludeDocument7 pagesUsing Namespace Int Int: #Include #Include #IncludeAlejandro Diaz CordobaNo ratings yet
- Nama: Dimas Hendrico NIM: 21/475218/PA/20551 Tugas 5 1. Program Rata-Rata Data Dalam ArrayDocument8 pagesNama: Dimas Hendrico NIM: 21/475218/PA/20551 Tugas 5 1. Program Rata-Rata Data Dalam ArrayDimasNo ratings yet
- CN - Lab2-1Document2 pagesCN - Lab2-1gabrielalaviniayNo ratings yet
- 1. Tìm kiếm và sắp xếp: // in phuong an xep hauDocument77 pages1. Tìm kiếm và sắp xếp: // in phuong an xep hauPouk SinglattanaNo ratings yet
- JellyDocument2 pagesJellySp21-Bcs-054 Muhammad MoarijNo ratings yet
- LKMASONIDocument11 pagesLKMASONIemiemiolteanNo ratings yet
- Tugas Kalkulus: NAMA: Annisa Amelia Syafitri NIM: 180535632575Document5 pagesTugas Kalkulus: NAMA: Annisa Amelia Syafitri NIM: 180535632575Annisa AmeliaNo ratings yet
- SMQ Assignment 1Document15 pagesSMQ Assignment 1Arvind RaveeNo ratings yet
- Fungsi - Putri Aji Kornia Dwi Lestari - 200536626458Document22 pagesFungsi - Putri Aji Kornia Dwi Lestari - 200536626458Putri Aji Kornia Dwi LestariNo ratings yet
- Program On Solving A Transportation ProblemDocument25 pagesProgram On Solving A Transportation ProblemLAXMI PRIYANKANo ratings yet
- Daa Lab AssignmentDocument6 pagesDaa Lab AssignmentMugdha 2727No ratings yet
- AlambamaDocument10 pagesAlambamaemiemiolteanNo ratings yet
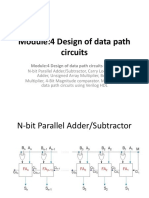
- Module:4 Design of Data Path Circuits 6 HoursDocument44 pagesModule:4 Design of Data Path Circuits 6 HoursSahana MecheriNo ratings yet
- Answer Key CDocument15 pagesAnswer Key CAnshu GangwarNo ratings yet
- 2DO TRABAJO DE ANALISIS NUMERICO - Irene IncacutipaDocument15 pages2DO TRABAJO DE ANALISIS NUMERICO - Irene IncacutipaIreneIMarcaNo ratings yet
- Travail Pratique nr.2Document6 pagesTravail Pratique nr.2Теодор ВрабиеNo ratings yet
- Lab 9Document4 pagesLab 9Jon Mckenzie GoNo ratings yet
- 20173174-Nguyễn Quang Huy-Buoi1-Tuan33Document15 pages20173174-Nguyễn Quang Huy-Buoi1-Tuan33Ai Tôi LàNo ratings yet
- Examen 3 Fase NewDocument6 pagesExamen 3 Fase NewSanmy Choque CorreaNo ratings yet
- DAA Elab 1Document127 pagesDAA Elab 1anant33331No ratings yet
- CMMDC RecursivDocument81 pagesCMMDC RecursivVasile GalbenNo ratings yet
- C++ LabprogDocument28 pagesC++ Labprogirfanahmed.dbaNo ratings yet
- Ing. Daniel Osorio Maldonado Página 1: #Include #Include #Include #IncludeDocument3 pagesIng. Daniel Osorio Maldonado Página 1: #Include #Include #Include #IncludeJoel EdNo ratings yet
- C++ Program File: Pulkit MoghaDocument51 pagesC++ Program File: Pulkit MoghaRahul JhangriNo ratings yet
- Discrete Mathmatics (CECSC01) : Tutorial AssignmentDocument68 pagesDiscrete Mathmatics (CECSC01) : Tutorial AssignmentDivya PalNo ratings yet
- Analysis and Design of Algorithms Lab File: Submitted byDocument20 pagesAnalysis and Design of Algorithms Lab File: Submitted byvaibhav30388No ratings yet
- Daa Lab 4Document22 pagesDaa Lab 4Mugdha 2727No ratings yet
- CodeDocument37 pagesCodeMạnh LêNo ratings yet
- CTD Prac. FileDocument43 pagesCTD Prac. FileABHISHEK KUMAR SAHNo ratings yet
- LU Decomposition With Partial Pivoting C ProgramDocument3 pagesLU Decomposition With Partial Pivoting C ProgramAmit MakhijaNo ratings yet
- Programming C++ AssignmentDocument15 pagesProgramming C++ AssignmentAwais ArshadNo ratings yet
- C++ Exercises (With Complete Solutions)Document41 pagesC++ Exercises (With Complete Solutions)theodor_munteanu100% (1)
- Loop LabDocument7 pagesLoop Labhiep.ngocs2023No ratings yet
- Baitap HamDocument24 pagesBaitap HamCam LamNo ratings yet
- Lab 8Document9 pagesLab 8Irtaza Ali NasirNo ratings yet
- DS Lab 02 (2020-Bse-051)Document9 pagesDS Lab 02 (2020-Bse-051)Mahnoor MustafaNo ratings yet
- COA Lab Manual COMPDocument28 pagesCOA Lab Manual COMPManoj Naik100% (2)
- Presidency College: C++Lab ManualDocument31 pagesPresidency College: C++Lab ManualSayantani ShayuNo ratings yet
- PRBLM C++Document8 pagesPRBLM C++Aida VoicuNo ratings yet
- C++ Programs - I MSC Add SemDocument23 pagesC++ Programs - I MSC Add SemGokulNo ratings yet
- Computer Practical File: Submitted By: Rohan Pradhan Class: Xii ADocument42 pagesComputer Practical File: Submitted By: Rohan Pradhan Class: Xii ANikhar PradhanNo ratings yet
- Algoritma Lanjut Dzikri FaizziyanDocument16 pagesAlgoritma Lanjut Dzikri FaizziyanDzikri FaizziyanNo ratings yet
- Ds LabDocument76 pagesDs LabSreelakshmi KNo ratings yet
- C++ Exercitii1Document8 pagesC++ Exercitii1Remus MunteanNo ratings yet
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYFrom EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNo ratings yet
- Process Safety Mangement v4Document6 pagesProcess Safety Mangement v4Argha Kusumah ReiNo ratings yet
- 2VAA009448 Alarm Portal v6Document4 pages2VAA009448 Alarm Portal v6Argha Kusumah ReiNo ratings yet
- Alarm DiscoveryDocument5 pagesAlarm DiscoveryArgha Kusumah ReiNo ratings yet
- 9AKK105713A9849 B Session 2 Alarm ManagementDocument39 pages9AKK105713A9849 B Session 2 Alarm ManagementArgha Kusumah ReiNo ratings yet
- Why Effective Alarm Management Is So Important in IndustryDocument43 pagesWhy Effective Alarm Management Is So Important in IndustryArgha Kusumah ReiNo ratings yet
- Intelligent Alarm Management Directs Operators To Critical EventsDocument6 pagesIntelligent Alarm Management Directs Operators To Critical EventsArgha Kusumah ReiNo ratings yet