You might also like
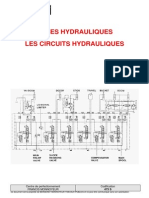
- 473 S - Circuits HydrauliquesDocument50 pages473 S - Circuits HydrauliquesZied Naat100% (5)
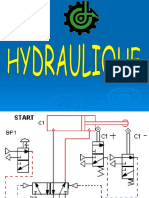
- HYDRAULIQUEDocument71 pagesHYDRAULIQUEKhalid Saadaoui67% (3)
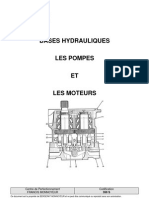
- 360 S-Base Hyd Pompe Et MoteurDocument53 pages360 S-Base Hyd Pompe Et Moteurseyegar100% (6)
- Pompes Et MoteursDocument68 pagesPompes Et Moteursscribdassaad75% (4)
- Cours Hydraulique IndustrielleDocument87 pagesCours Hydraulique IndustrielleNabil Serrafi100% (16)
- HydrauliqueDocument95 pagesHydrauliqueh_hamza100% (3)
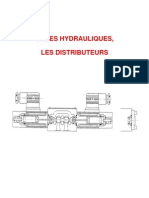
- 476 S - Distributeurs HydrauliquesDocument43 pages476 S - Distributeurs Hydrauliquesanadif18967100% (5)
- Systemes HydrauliqueDocument65 pagesSystemes HydrauliqueBen Fah100% (2)
- Exercices HydrauliqueDocument10 pagesExercices HydrauliqueMohamed Elouafi50% (2)
- 484 S - Pompes À EngrenagesDocument28 pages484 S - Pompes À Engrenagesanadif18967100% (4)
- Hydraulique GeneraleDocument34 pagesHydraulique Generalesidou21100% (14)
- Hydraulique - CoursDocument122 pagesHydraulique - CoursJoel Edimo100% (5)
- Orbitrol Profs MVMDocument9 pagesOrbitrol Profs MVMnorbus100% (2)
- Hydraulique IndustrielleDocument35 pagesHydraulique IndustrielleHicham Boudrare100% (4)
- Moteurs HydrauliquesDocument38 pagesMoteurs HydrauliquesMoad KhiderNo ratings yet
- Cours Hydraulique PDFDocument177 pagesCours Hydraulique PDFFaiçalEssabery94% (68)
- Cours Relevage HydrauliquerDocument43 pagesCours Relevage Hydrauliquersabbanrachid100% (2)
- 477 S - Filtres HydrauliquesDocument38 pages477 S - Filtres Hydrauliquesanadif18967100% (7)
- Introduction PompesDocument97 pagesIntroduction PompesMohammed Amine Kened100% (4)
- Cours Hydraulique 2Document101 pagesCours Hydraulique 2Yassine Abouelhouda80% (5)
- Cours Machines Hydrauliques Mode de CompDocument106 pagesCours Machines Hydrauliques Mode de Compsamuel kahiluNo ratings yet
- Cours Hydraulique Et Pneumatique2Document68 pagesCours Hydraulique Et Pneumatique2lotfi ben said100% (3)
- Circuit Hydraulique Engin ChantierDocument12 pagesCircuit Hydraulique Engin ChantierLiebherr100% (1)
- Receuille D'exeercices de Transmission HydrauliqueDocument10 pagesReceuille D'exeercices de Transmission Hydrauliquematozo100% (1)
- 2 Hydraulique IndustrielDocument58 pages2 Hydraulique IndustrielhatemNo ratings yet
- Pompes INPEDocument43 pagesPompes INPErabah100% (2)
- Installation HydrauliqueDocument11 pagesInstallation HydrauliqueAyoub Fajraoui100% (2)
- Installation Hydraulique PDFDocument11 pagesInstallation Hydraulique PDFredaNo ratings yet
- 378 - Circuit Hydraulique Base PDFDocument27 pages378 - Circuit Hydraulique Base PDFHillal TamsaoueteNo ratings yet
- 3 Machines Hydrauliques Analyse Dimensionnel Similitude PDFDocument27 pages3 Machines Hydrauliques Analyse Dimensionnel Similitude PDFSara BouhoutNo ratings yet
- Cours Hydraulique FondamentalDocument79 pagesCours Hydraulique Fondamentalwhmidi7331100% (2)
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.From EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.No ratings yet
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysFrom EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo ratings yet
- Pompe & Compresseur Préparation ExamDocument7 pagesPompe & Compresseur Préparation ExamISMAILNo ratings yet
- Exposé ACMDocument17 pagesExposé ACMMahamadou AwalNo ratings yet
- Cours Pompe PDFDocument19 pagesCours Pompe PDFHermas SEYIKPE100% (2)
- Rapport 1Document10 pagesRapport 1rocceli nzoulouNo ratings yet
- Mini Projet - MEI92Document10 pagesMini Projet - MEI92Ilyes KhelifiNo ratings yet
- Pompe TriplexDocument23 pagesPompe TriplexBac mathNo ratings yet
- Nouveau Microsoft Word DocumentDocument21 pagesNouveau Microsoft Word DocumentAchref ChaabaniNo ratings yet
- Pompe A Piston.... ImadDocument11 pagesPompe A Piston.... Imadعماد الدين بن عبودNo ratings yet
- Sommaire: Actionneurs Hydrauliques 2A Ing TechnoDocument35 pagesSommaire: Actionneurs Hydrauliques 2A Ing Technodwe merNo ratings yet
- Cours Hydraulique L3 CM UsthbDocument18 pagesCours Hydraulique L3 CM UsthbHamza BellemouNo ratings yet
- Guide de Conception Des Stations de Pompage 99 PDFDocument52 pagesGuide de Conception Des Stations de Pompage 99 PDFjolegende91% (32)
- RTODocument20 pagesRTOguildarteNo ratings yet
- Cours PompeDocument19 pagesCours PompeZineddineNo ratings yet
- Limiteur de PressionDocument7 pagesLimiteur de PressionElnBEKKARYNo ratings yet
- bm4272 PDFDocument12 pagesbm4272 PDFebey_endun100% (1)
- Turbo 2 ADocument87 pagesTurbo 2 AAuzlem Faouzi50% (2)
- Moumene Salah EddineDocument24 pagesMoumene Salah EddineAhmed KramdiNo ratings yet
- Système HydrauliqueDocument10 pagesSystème Hydrauliquerocceli nzoulouNo ratings yet
- Conception Et FonctionnementDocument20 pagesConception Et Fonctionnementkofane yakanaNo ratings yet
- Conception, Calcul Et Dimensionnement Des CompresseursDocument36 pagesConception, Calcul Et Dimensionnement Des CompresseursAhmed GHATTAB0% (1)
- CM 3A ReducteurDocument37 pagesCM 3A ReducteurMoudi BouhlelNo ratings yet
- Cours Machines HydrauliquesDocument52 pagesCours Machines HydrauliquesDédé KambalaNo ratings yet
- La Pompe CentrifugeDocument12 pagesLa Pompe CentrifugeAfa AlgeriaNo ratings yet
- Pompe 2Document24 pagesPompe 2Ferchichi HatemNo ratings yet
- Cours de Turbomachines. Partie 1 Et 2Document9 pagesCours de Turbomachines. Partie 1 Et 2Djamel channel قناة جمالNo ratings yet
- Siderflex Catalogue PDFDocument12 pagesSiderflex Catalogue PDFSarah LayadiNo ratings yet
- Téléchargement Gratuit Du Logiciel Hacker Compte FacebookDocument2 pagesTéléchargement Gratuit Du Logiciel Hacker Compte Facebookcageysadness3350100% (1)
- Presse Pneumatique - ManuelDocument39 pagesPresse Pneumatique - ManuelAlexandru CebotariNo ratings yet
- Schindler 3300Document32 pagesSchindler 3300coco MP100% (1)
- Renault CAN CLIP 174 100% Confirmé Au Travail ParfaitDocument6 pagesRenault CAN CLIP 174 100% Confirmé Au Travail ParfaitMou DaweiNo ratings yet
- Chapitre 5 ELEMENTS DE CARTOGRAPHIE 5.1 PDFDocument6 pagesChapitre 5 ELEMENTS DE CARTOGRAPHIE 5.1 PDFAT NMNo ratings yet
- BungalowDocument4 pagesBungalowondoua lomo pierre raoulNo ratings yet
- Régulateur Thermorégulateur (Man - 600 - Fra) PDFDocument27 pagesRégulateur Thermorégulateur (Man - 600 - Fra) PDFMiraNo ratings yet
- Quq Ex Corr TurbomachineDocument19 pagesQuq Ex Corr TurbomachineMohamedAmineZemni100% (1)
- Configuration D'un Router Avec Le Protocole BGPDocument8 pagesConfiguration D'un Router Avec Le Protocole BGPBasma Oueslati0% (1)
- 17 Briques Et Blocs en Terre CuiteDocument2 pages17 Briques Et Blocs en Terre CuitePOUTOULI EssohounaNo ratings yet
- Série 1 3éme AnnéeDocument2 pagesSérie 1 3éme AnnéeYahya Brd100% (1)
- 5-Energie Et Actions Electrostatiques (Document12 pages5-Energie Et Actions Electrostatiques (benyouNo ratings yet
- LPro Polym PDFDocument23 pagesLPro Polym PDFRafik Dra100% (1)
- Traitement Thermique FinDocument11 pagesTraitement Thermique Finprof.stm.steNo ratings yet
- Devis Quantitatif & Estimatif PK33+960-D.N1200 Mm-PN25 ARSDocument12 pagesDevis Quantitatif & Estimatif PK33+960-D.N1200 Mm-PN25 ARSBOUZERDANo ratings yet
- PanneDocument2 pagesPanneAmine GardamNo ratings yet
- Exercice7: SolutionDocument8 pagesExercice7: SolutionJordan Kemta100% (1)
- Les Conduits ÉlectriquesDocument10 pagesLes Conduits ÉlectriquesRawand HmaiedNo ratings yet
- Habilitation Electrique Bs - EleveDocument2 pagesHabilitation Electrique Bs - EleveAl_RodolpheNo ratings yet
- Questions & Objectifs - Module Puissance ÉlectriqueDocument1 pageQuestions & Objectifs - Module Puissance ÉlectriquemaximzelinskyiNo ratings yet
- Rapport de Stage IngénieurDocument98 pagesRapport de Stage Ingénieurmajdi sara100% (1)
- Résistance Au FeuDocument150 pagesRésistance Au FeuZakaria ZinounNo ratings yet
- Mémoire: Pour L'obtention Du Diplôme D'ingénieur D'etat Filière: Travaux Publics Spécialité: Matériaux & StructuresDocument192 pagesMémoire: Pour L'obtention Du Diplôme D'ingénieur D'etat Filière: Travaux Publics Spécialité: Matériaux & StructuresAhmedNo ratings yet
- Matrice D'inertieDocument4 pagesMatrice D'inertieJean AbelaNo ratings yet
- Hamadouche Hanane Et Bouarab NaceraDocument57 pagesHamadouche Hanane Et Bouarab NaceraHALIMANo ratings yet
- 0301f - Guide Pour La Demande de Qualification Des Inspecteurs en Soudage 2020 PDFDocument20 pages0301f - Guide Pour La Demande de Qualification Des Inspecteurs en Soudage 2020 PDFبريكي عقبةNo ratings yet
- Manuel D'instructions T500 - FRDocument88 pagesManuel D'instructions T500 - FRcristianNo ratings yet
- Manuel de Conception Des Ponceaux-2017Document506 pagesManuel de Conception Des Ponceaux-2017Amer MezherNo ratings yet
- Ponceuse D'angleDocument7 pagesPonceuse D'angleMebarki Riadh100% (1)