You might also like
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- AT89S52Document19 pagesAT89S52Nikhith ReddyNo ratings yet
- Digital Code Locking SystemDocument89 pagesDigital Code Locking SystemSrinivas Reddy100% (5)
- AT89S52Document20 pagesAT89S52Bhargav GoudNo ratings yet
- Compact DeviceDocument57 pagesCompact Devicesriram kantipudiNo ratings yet
- AT89S52 MICROCONTROLLER GUIDEDocument14 pagesAT89S52 MICROCONTROLLER GUIDEThanga PazhamNo ratings yet
- 2.1 Microcontroller: Embedded SystemsDocument23 pages2.1 Microcontroller: Embedded SystemspavanNo ratings yet
- Messenger Development Without Internet Using Zigbee TechnologyDocument89 pagesMessenger Development Without Internet Using Zigbee TechnologyRaghu ReddyNo ratings yet
- Chapter-3 Hardware ComponentsDocument23 pagesChapter-3 Hardware ComponentsKrishna PrasadNo ratings yet
- 2.traffic Clearance For VIPs Vehicles With DTMFDocument61 pages2.traffic Clearance For VIPs Vehicles With DTMFTapaswi SriramaneniNo ratings yet
- 8051 At89s52Document18 pages8051 At89s52Sanjana SinghNo ratings yet
- Internal Architecture of 89C52Document24 pagesInternal Architecture of 89C52Anjali KamlapureNo ratings yet
- Micro Controller 89c51Document17 pagesMicro Controller 89c51g_prashanth0704075No ratings yet
- 89C51 MicrocontrollerDocument7 pages89C51 MicrocontrollerpranaysudaNo ratings yet
- Automatic Speed BreakerDocument69 pagesAutomatic Speed BreakerRohitesh KumarNo ratings yet
- 3.3 Microcontroller:: Fig: 3.2: MicrocontrollersDocument20 pages3.3 Microcontroller:: Fig: 3.2: Microcontrollersnafisa sultanaNo ratings yet
- Microcontrollers Explained: Features of AT89S52 8-Bit MicrocontrollerDocument6 pagesMicrocontrollers Explained: Features of AT89S52 8-Bit MicrocontrollerMikroc Thupati SrinivsNo ratings yet
- Metal Gas Detec RoboDocument37 pagesMetal Gas Detec RoboVijay SaiNo ratings yet
- AT89C51 MicrocontrollerDocument8 pagesAT89C51 MicrocontrollerSaroj TimsinaNo ratings yet
- MicroDocument17 pagesMicroNithish RNo ratings yet
- AT89C55Document24 pagesAT89C55Yerson CrespoNo ratings yet
- AT89s52 MicrocontrollerDocument27 pagesAT89s52 MicrocontrollerDinesh DspNo ratings yet
- 2.2.1 A Brief History of 8051Document16 pages2.2.1 A Brief History of 8051esther_kakani2029No ratings yet
- 8051 Architecture: 8051 Architecture Consists of These FeaturesDocument30 pages8051 Architecture: 8051 Architecture Consists of These Featuresdlwdeadman_monster819100% (1)
- WI Max TechnologyDocument15 pagesWI Max TechnologyDimple AmudaNo ratings yet
- Battery Operated Coin BasedDocument22 pagesBattery Operated Coin BasedMujahid Karwar50% (4)
- Cetpa Infotech Pvt. LTD: Department of Embedded SystemDocument42 pagesCetpa Infotech Pvt. LTD: Department of Embedded SystemKapil VijNo ratings yet
- AT89s52 MicrocontrollerDocument13 pagesAT89s52 MicrocontrollerVishnu VardhanNo ratings yet
- 3.2 At89C51 Microcontroller: 3.2.1 Features:: Fig 3.2:block Diagram of AT89C51 Micro ControllerDocument6 pages3.2 At89C51 Microcontroller: 3.2.1 Features:: Fig 3.2:block Diagram of AT89C51 Micro ControllermdayyubNo ratings yet
- Cetpa Infotech Pvt. LTD: Department of Embedded SystemDocument42 pagesCetpa Infotech Pvt. LTD: Department of Embedded SystemSiddharthRawatNo ratings yet
- 8051 Vs Motorola 68HC11Document19 pages8051 Vs Motorola 68HC11zuanne83No ratings yet
- PROJECT REPORT MetrofinalDocument38 pagesPROJECT REPORT MetrofinalAnil TandonNo ratings yet
- Report On Washing MachineDocument67 pagesReport On Washing MachineshashankjainsssNo ratings yet
- Introduction to the 8051 Microcontroller: Architecture & CapabilitiesDocument26 pagesIntroduction to the 8051 Microcontroller: Architecture & CapabilitiesSanjeev Kumar SahuNo ratings yet
- Unit 4 Micro Controller 8051Document20 pagesUnit 4 Micro Controller 8051Anbalagan Guru100% (1)
- Project Report Metro FinalDocument46 pagesProject Report Metro FinalPriya VishnoiNo ratings yet
- Unit 4 ADocument50 pagesUnit 4 ASahil SinghNo ratings yet
- AT89C51-Based Digital Audio ProcessorDocument67 pagesAT89C51-Based Digital Audio Processoredinesh90No ratings yet
- Microcontroller AT89C51 GuideDocument5 pagesMicrocontroller AT89C51 GuidePuja TiwariNo ratings yet
- AT89s52 MicrocontrollerDocument13 pagesAT89s52 MicrocontrolleraruljeromeNo ratings yet
- MA1Document143 pagesMA1Manish NarkhedeNo ratings yet
- 89 S 52Document8 pages89 S 52Ashok BalajiNo ratings yet
- RF Based Pick-And-place-robot Use ZigbeeDocument66 pagesRF Based Pick-And-place-robot Use Zigbeesumit_saNo ratings yet
- Visitor Counter.............Document31 pagesVisitor Counter.............Dipesh MittalNo ratings yet
- Auto LightDocument37 pagesAuto LightKrishna MalhotraNo ratings yet
- A Presentation On Microcontroller 8051Document22 pagesA Presentation On Microcontroller 8051Praveen ShrivastavaNo ratings yet
- AT89C51Document24 pagesAT89C51Kavin SengodanNo ratings yet
- Chapter - 1Document39 pagesChapter - 1Penumatsapradeep Varma EceNo ratings yet
- Power Supply:: TransformerDocument17 pagesPower Supply:: Transformerobula863No ratings yet
- Doc4127 PDFDocument121 pagesDoc4127 PDFLovelySinghNo ratings yet
- ME-303 Mechatronics: Dr. Fakhre Alam KhanDocument29 pagesME-303 Mechatronics: Dr. Fakhre Alam KhanSadia KhanNo ratings yet
- Tampering Detection of Transmission Line: AbstractDocument9 pagesTampering Detection of Transmission Line: AbstractJayant KumarNo ratings yet
- Microcontroller Based Down Counter SystemDocument24 pagesMicrocontroller Based Down Counter SystemChandan Bera100% (1)
- Microprocessor Lab Manual EE0310Document44 pagesMicroprocessor Lab Manual EE0310sathishkumar.vNo ratings yet
- 3469 GSM Motor ControlDocument37 pages3469 GSM Motor ControlSudheesh Nair ManjumangalNo ratings yet
- Automatic Temperature ControllerDocument24 pagesAutomatic Temperature Controllerarunbera00792% (12)
- WINSEM2023-24 BECE204L TH VL2023240505623 2024-01-05 Reference-Material-IIDocument64 pagesWINSEM2023-24 BECE204L TH VL2023240505623 2024-01-05 Reference-Material-IIpratyakshswamiNo ratings yet
- TANTRA Revised StatementsDocument4 pagesTANTRA Revised StatementsmgitecetechNo ratings yet
- Test Your C Skills by "Yashwant Kanetkar"Document129 pagesTest Your C Skills by "Yashwant Kanetkar"bestddl82% (28)
- Wrestle ManiacDocument3 pagesWrestle ManiacmgitecetechNo ratings yet
- Splash!!!Document3 pagesSplash!!!mgitecetechNo ratings yet
- Fifa @mgitDocument4 pagesFifa @mgitmgitecetechNo ratings yet
- ROBO's Royal RumbleDocument3 pagesROBO's Royal RumblemgitecetechNo ratings yet
- Job Fair in MgitDocument4 pagesJob Fair in MgitmgitecetechNo ratings yet
- Death RaceDocument3 pagesDeath RacemgitecetechNo ratings yet
- ROBOLIGADocument4 pagesROBOLIGAmgitecetechNo ratings yet
- Treasure Hunt: Event ObjectiveDocument4 pagesTreasure Hunt: Event ObjectivemgitecetechNo ratings yet
- Job Fair in Mgit1Document3 pagesJob Fair in Mgit1mgitecetechNo ratings yet
- Job Fair in MgitDocument4 pagesJob Fair in MgitmgitecetechNo ratings yet
- MY ROBO's Got TalentDocument3 pagesMY ROBO's Got TalentmgitecetechNo ratings yet
- ROBOLIGADocument4 pagesROBOLIGAmgitecetechNo ratings yet
- ROBO's Royal RumbleDocument3 pagesROBO's Royal RumblemgitecetechNo ratings yet
- ROBOPIRATES Version 1.o: Event ObjectiveDocument4 pagesROBOPIRATES Version 1.o: Event ObjectivemgitecetechNo ratings yet
- Gate Ece 1992Document5 pagesGate Ece 1992mgitecetechNo ratings yet
- Catch Me If U CanDocument5 pagesCatch Me If U CanmgitecetechNo ratings yet
- Instructions For RobopiratesDocument4 pagesInstructions For RobopiratesmgitecetechNo ratings yet
- IJCTA Author InstructionDocument2 pagesIJCTA Author InstructionShashank BholaneNo ratings yet
- Catch Me If U CanDocument4 pagesCatch Me If U CanmgitecetechNo ratings yet
- Introduction To ProbabilityDocument520 pagesIntroduction To Probabilityfluffy1777100% (28)
- Gate Ece 1993Document7 pagesGate Ece 1993mgitecetechNo ratings yet
- Instructions For Royal RummbleDocument3 pagesInstructions For Royal RummblemgitecetechNo ratings yet
- Instructions For RoboligaDocument3 pagesInstructions For RoboligamgitecetechNo ratings yet
- Instructions For Catch Me If U CanDocument4 pagesInstructions For Catch Me If U CanmgitecetechNo ratings yet
- Instructions For My Bobo's Got TalentDocument2 pagesInstructions For My Bobo's Got TalentmgitecetechNo ratings yet
- Gate Ece 1994Document4 pagesGate Ece 1994mgitecetechNo ratings yet
- Gate Ece 1996Document5 pagesGate Ece 1996mgitecetechNo ratings yet
- Gate Ece 1995Document5 pagesGate Ece 1995mgitecetechNo ratings yet
- Password Protected Circuit Breaker: Audisankara Institute of TechnologyDocument22 pagesPassword Protected Circuit Breaker: Audisankara Institute of TechnologyGokul SriramNo ratings yet
- Ti SN 75423Document7 pagesTi SN 75423jkaneNo ratings yet
- Uln 2803 CDocument22 pagesUln 2803 CJesin KimNo ratings yet
- Small Signal Amplifiers Eet3Document67 pagesSmall Signal Amplifiers Eet3Dan ChapsNo ratings yet
- Ee-Motion Sensor Light Control SystemDocument48 pagesEe-Motion Sensor Light Control SystemDandy KelvinNo ratings yet
- Ebook Electronic Principles 8Th Edition Malvino Test Bank Full Chapter PDFDocument34 pagesEbook Electronic Principles 8Th Edition Malvino Test Bank Full Chapter PDFodiletoanhyx2p3100% (9)
- Single Stage AmplifiersDocument38 pagesSingle Stage AmplifiersSivakumar PothirajNo ratings yet
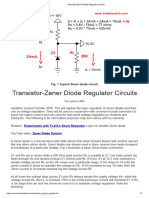
- Transistor-Zener Diode Regulator CircuitsDocument7 pagesTransistor-Zener Diode Regulator Circuitsmohamed lamine elbiskriNo ratings yet
- BJT Circuits - Basic Electronics GuideDocument55 pagesBJT Circuits - Basic Electronics GuideNenad Stamenović100% (1)
- Digital Fuel Meter and Theft Detection Using PIC MicrocontrollerDocument4 pagesDigital Fuel Meter and Theft Detection Using PIC MicrocontrollerMr. Amit Kumar SinghNo ratings yet
- ULN200x, ULQ200x High-Voltage, High-Current Darlington Transistor ArraysDocument34 pagesULN200x, ULQ200x High-Voltage, High-Current Darlington Transistor ArraysvincentavantNo ratings yet
- Tansistor As SwitchDocument19 pagesTansistor As Switchgokula_1No ratings yet
- ULN200x, ULQ200x High-Voltage, High-Current Darlington Transistor ArraysDocument34 pagesULN200x, ULQ200x High-Voltage, High-Current Darlington Transistor ArraysadrianoucamNo ratings yet
- Report of Designing The Baby Walker Distance ControllerDocument83 pagesReport of Designing The Baby Walker Distance Controllercakunza100% (1)
- Water Level Controller of Overhead Tanks Using Water Level Sense - Project ReportDocument29 pagesWater Level Controller of Overhead Tanks Using Water Level Sense - Project ReportIrfan DanishNo ratings yet
- A Simple and Cheap Dark-Detecting LED Circuit - Evil Mad Scientist LaboratoriesDocument22 pagesA Simple and Cheap Dark-Detecting LED Circuit - Evil Mad Scientist LaboratoriesnoufutanurNo ratings yet
- Microcontroller Basics BeginnersDocument19 pagesMicrocontroller Basics BeginnersNnodim KajahNo ratings yet
- TIP120 DatasheetDocument5 pagesTIP120 DatasheetyampireNo ratings yet
- Miscellaneous and Multiple Bias ConfigurationsDocument26 pagesMiscellaneous and Multiple Bias ConfigurationsJeric SapaulaNo ratings yet
- UTC ULN2004 Linear Integrated Circuit: 7Ch Darlington Sink DriverDocument7 pagesUTC ULN2004 Linear Integrated Circuit: 7Ch Darlington Sink Driverconti51No ratings yet
- NE555P Light Sensor Circuit Controls Loads AutomaticallyDocument7 pagesNE555P Light Sensor Circuit Controls Loads AutomaticallySimaab AmirNo ratings yet
- RELAY1Document11 pagesRELAY1jayapriyadharshini02No ratings yet
- AN1184 Application Note: Bu808Dfi in The Horizontal Deflection StageDocument13 pagesAN1184 Application Note: Bu808Dfi in The Horizontal Deflection StagetrmnmyNo ratings yet
- Pinouts For Various Common Chips and HybridsDocument32 pagesPinouts For Various Common Chips and HybridstsromailNo ratings yet
- Small Signal Analysis of Amplifiers (BJT & Fet) : Narayana Engineering College:: NelloreDocument12 pagesSmall Signal Analysis of Amplifiers (BJT & Fet) : Narayana Engineering College:: NelloreTharun kondaNo ratings yet
- Multistage Amplifier and Differential Amplifier CircuitsDocument22 pagesMultistage Amplifier and Differential Amplifier CircuitsBùi Quốc AnNo ratings yet
- Datasheet Uln2803aDocument21 pagesDatasheet Uln2803aDiego Alejandro Gallardo IbarraNo ratings yet
- 8-Channel Darlington Driver for Relays & MotorsDocument8 pages8-Channel Darlington Driver for Relays & MotorsRogerNo ratings yet
- "Underground Cable Fault Location Detector Using Arduino" 166510309045 166510309033 166510309046 166510309051Document32 pages"Underground Cable Fault Location Detector Using Arduino" 166510309045 166510309033 166510309046 166510309051ShahNo ratings yet