
You might also like
- Planes QuimicaDocument17 pagesPlanes QuimicaDaniel Elias Moreira ZambranoNo ratings yet
- MateriasDocument4 pagesMateriasDaniel Elias Moreira ZambranoNo ratings yet
- Practica de Laboratorio FiltrosDocument6 pagesPractica de Laboratorio FiltrosDaniel Elias Moreira ZambranoNo ratings yet
- Proyecto de HidrostaticaDocument13 pagesProyecto de HidrostaticaDaniel Elias Moreira Zambrano100% (3)
- Analisis AlgebraicoDocument33 pagesAnalisis AlgebraicoVictor Manuel Chacon HernandezNo ratings yet
- 3.2.3.6 Práctica de Laboratorio: Investigación de Estándares de RedesDocument3 pages3.2.3.6 Práctica de Laboratorio: Investigación de Estándares de RedesAndres DavidNo ratings yet
- Proyecto Final Uapa Diplomado en Habilitación Docente PorDocument10 pagesProyecto Final Uapa Diplomado en Habilitación Docente PorOlga Almonte AlmonteNo ratings yet
- Quiz General 2Document15 pagesQuiz General 2StevenPiedraMoraNo ratings yet
- El PerseguidorDocument1 pageEl PerseguidorLuciaSDSNo ratings yet
- Diaz Alvaro Aproximación Al Texto Escrito (1) - 1 PDFDocument141 pagesDiaz Alvaro Aproximación Al Texto Escrito (1) - 1 PDFCael100% (1)
- Convertir Un Documento de Texto A MP3Document13 pagesConvertir Un Documento de Texto A MP3Gema Fernández OsorioNo ratings yet
- Plan de Clase 1B Nuevo DCDocument18 pagesPlan de Clase 1B Nuevo DCEFRAINNo ratings yet
- Lo Comico y Lo TragicoDocument9 pagesLo Comico y Lo TragicoBelen GonzalezNo ratings yet
- Limpiezas Energeticas - Parte 1Document30 pagesLimpiezas Energeticas - Parte 1Veronica Valdivia100% (1)
- Generación de Tensiones de ImpulsoDocument6 pagesGeneración de Tensiones de Impulsolaura ruizNo ratings yet
- Informe Pericial en El Fuero PenalDocument9 pagesInforme Pericial en El Fuero PenalPRISCILA XIOMARA VASQUEZ MOLINANo ratings yet
- PáncretitisDocument6 pagesPáncretitisPilar LópezNo ratings yet
- Concepto de ParrafoDocument1 pageConcepto de ParrafoDario Sonato100% (1)
- Guía Ciclo 2 Primero Medio Ciencias NDocument10 pagesGuía Ciclo 2 Primero Medio Ciencias Nromina paredesNo ratings yet
- Esferoplastos, Protoplastos y Formas LDocument3 pagesEsferoplastos, Protoplastos y Formas LEduardo EncarnaciónNo ratings yet
- Apuntes Sobre La Crítica Feminista y La Literatura Hispanoamericana - Jean FrancoDocument14 pagesApuntes Sobre La Crítica Feminista y La Literatura Hispanoamericana - Jean FrancoAmalia Moreno100% (6)
- D Xix 2427 1977Document17 pagesD Xix 2427 1977Gaston LisantiNo ratings yet
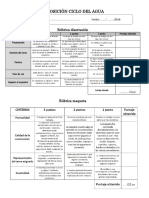
- Rubrica Ciclo Del AguaDocument1 pageRubrica Ciclo Del Aguaangmil0% (1)
- Ser Sal y LuzDocument9 pagesSer Sal y LuzLuis SanchezNo ratings yet
- Reporte Vigencia DerechosDocument2 pagesReporte Vigencia DerechosJuan Manuel GonzálezNo ratings yet
- CV Fernando Nontol Pastor 2020Document18 pagesCV Fernando Nontol Pastor 2020Ancestral AliengensNo ratings yet
- PIMIENTADocument1 pagePIMIENTAManuel HarazemNo ratings yet
- El Arca Del PactoDocument164 pagesEl Arca Del PactoGorkyAlmaoNo ratings yet
- VIERNES, 09 de Junio MarlenyDocument10 pagesVIERNES, 09 de Junio MarlenyElsa BautistaNo ratings yet
- Texto Del Dilema - ConflictoDocument1 pageTexto Del Dilema - ConflictoRoberto Carlos Chumacero SuncionNo ratings yet
- Hoja - de - Vida CaterynDocument3 pagesHoja - de - Vida CaterynIvan Ivan RaggamuffinNo ratings yet
- Ensayo de MacroDocument3 pagesEnsayo de MacroEnilse Maria Vanegas S.No ratings yet
- Analogías Teoría BásicaDocument6 pagesAnalogías Teoría Básicaespañol msNo ratings yet
- Sistema de AlcantarilladoDocument4 pagesSistema de AlcantarilladoMarcoCalleDelgado100% (1)
- El Abrazo de OsoDocument1 pageEl Abrazo de OsoMaximiliano ImazNo ratings yet
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalFrom EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalRating: 5 out of 5 stars5/5 (3)
- Guía práctica para la refracción ocularFrom EverandGuía práctica para la refracción ocularRating: 5 out of 5 stars5/5 (2)
- Armónicas en Sistemas Eléctricos IndustrialesFrom EverandArmónicas en Sistemas Eléctricos IndustrialesRating: 4.5 out of 5 stars4.5/5 (12)
- Química orgánica: ejercicios de aplicaciónFrom EverandQuímica orgánica: ejercicios de aplicaciónRating: 5 out of 5 stars5/5 (3)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleFrom EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleRating: 5 out of 5 stars5/5 (3)
- Cálculo integral: Técnicas de integraciónFrom EverandCálculo integral: Técnicas de integraciónRating: 4 out of 5 stars4/5 (8)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosFrom EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosRating: 5 out of 5 stars5/5 (2)
- La Guía Definitiva en Matemáticas para el Ingreso a la UniversidadFrom EverandLa Guía Definitiva en Matemáticas para el Ingreso a la UniversidadRating: 4 out of 5 stars4/5 (11)
















































![Diseño de Experimentos [Métodos y Aplicaciones]](https://imgv2-2-f.scribdassets.com/img/word_document/436271314/149x198/596c96deb2/1654336147?v=1)