You might also like
- Instalación y configuración de periféricos microinformáticos. IFCT0309From EverandInstalación y configuración de periféricos microinformáticos. IFCT0309No ratings yet
- UF1866 - Instalación y configuración de servicios en equipos de telefoníaFrom EverandUF1866 - Instalación y configuración de servicios en equipos de telefoníaNo ratings yet
- Análisis del mercado de productos de comunicaciones. IFCT0410From EverandAnálisis del mercado de productos de comunicaciones. IFCT0410No ratings yet
- Mantenimiento de infraestructuras de redes locales de datos. ELES0209From EverandMantenimiento de infraestructuras de redes locales de datos. ELES0209No ratings yet
- Desarrollo del proyecto de la red telemática. IFCT0410From EverandDesarrollo del proyecto de la red telemática. IFCT0410No ratings yet
- Converter ADC-DAC PIC18F4550Document4 pagesConverter ADC-DAC PIC18F4550Aranguthy CabreraNo ratings yet
- Libro Algebra LinealDocument153 pagesLibro Algebra Linealmauri soldierNo ratings yet
- Curso CX8-v6Document71 pagesCurso CX8-v6Sky BlackNo ratings yet
- Control PID de Velocidad de Un Motor DC Manejado Comandado Mediante JoystickDocument7 pagesControl PID de Velocidad de Un Motor DC Manejado Comandado Mediante JoystickWilliam SánchezNo ratings yet
- Puerto ParaleloDocument6 pagesPuerto ParaleloAndrés A. PavónNo ratings yet
- Transmision Por Fibra OpticaDocument70 pagesTransmision Por Fibra OpticaEDSONNo ratings yet
- Tesis Prototipo de Robot Móvil TeleoperadoDocument107 pagesTesis Prototipo de Robot Móvil TeleoperadoGerson DepablosNo ratings yet
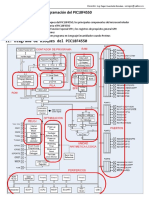
- P01 Modelo de Programación Del PIC18F4550Document14 pagesP01 Modelo de Programación Del PIC18F4550Fide Alvarado100% (1)
- TFG Diego CordonDocument188 pagesTFG Diego Cordonfer poloNo ratings yet
- Manual Curso RedesDocument215 pagesManual Curso RedesOtro CorreoNo ratings yet
- Circuitos SecuencialesDocument32 pagesCircuitos SecuencialesCristobal SanchezNo ratings yet
- Temas Selectos de Redes y TelefoníaDocument5 pagesTemas Selectos de Redes y TelefoníaJesus de la CruzNo ratings yet
- IFC361 1 RV - Q Documento PublicadoDocument27 pagesIFC361 1 RV - Q Documento PublicadocarlosNo ratings yet
- Dispositivos de potencia SCR, TRIAC y DIACDocument8 pagesDispositivos de potencia SCR, TRIAC y DIACHolami Nombrees Jose AngelNo ratings yet
- Caracteristicas PC Industrial SimaticDocument30 pagesCaracteristicas PC Industrial SimaticAlberto Lopez SanchezNo ratings yet
- Curso de AutoCAD 2009Document42 pagesCurso de AutoCAD 2009alex08No ratings yet
- Microsof Ofice Como ActivarDocument6 pagesMicrosof Ofice Como Activarjhony llacua huertaNo ratings yet
- Lcdtecla H 01Document37 pagesLcdtecla H 01luis alberto100% (1)
- PRÁCTICASDocument52 pagesPRÁCTICASFroylan Alfonso Moya Bustillos100% (1)
- Programacion Cursos CISCO MARACAY-1Document1 pageProgramacion Cursos CISCO MARACAY-1Hebert RamirezNo ratings yet
- 15-Practica - Comunicacion PLC 1200+plcsim+factory IoDocument2 pages15-Practica - Comunicacion PLC 1200+plcsim+factory IoWALTER CHOQUE COPARINo ratings yet
- Sistemas EmbebidosDocument31 pagesSistemas EmbebidosJuan Carlos Olivares RojasNo ratings yet
- Simulacion en Matlab LteDocument12 pagesSimulacion en Matlab LteJoss Marcos RHNo ratings yet
- Fundamentos de La Televisión DigitalDocument12 pagesFundamentos de La Televisión DigitalOscar Misael P. VictorinoNo ratings yet
- Practica Centralita 3CX v15Document3 pagesPractica Centralita 3CX v15AntonAntonNo ratings yet
- Clase 20. Arduino SimulinkDocument9 pagesClase 20. Arduino SimulinkYayitaLeonaB.VanegasNo ratings yet
- Asignatura - Comunicaciones Industriales UnedDocument5 pagesAsignatura - Comunicaciones Industriales UnedJaime BarraganNo ratings yet
- Tarea 6 ADT1Document19 pagesTarea 6 ADT1Luis MoraNo ratings yet
- Manual de Configuración Modem 2 WireDocument4 pagesManual de Configuración Modem 2 WireOsKar KoKa100% (1)
- Monitor de corriente I2C INA219Document25 pagesMonitor de corriente I2C INA219JOSE FRANCIA ZORRILLANo ratings yet
- Configuración de Redes en DebianDocument49 pagesConfiguración de Redes en DebianCaio de ChtNo ratings yet
- Fir 315Document14 pagesFir 315Giovanni NavarroNo ratings yet
- Fuente de VoltajeDocument19 pagesFuente de VoltajeMainor ZamoraNo ratings yet
- Electronicafuentesconmutadason 151005063905 Lva1 App6891.en - EsDocument64 pagesElectronicafuentesconmutadason 151005063905 Lva1 App6891.en - EsJuan RiosNo ratings yet
- Armonicos y Seccion Del NeutroDocument2 pagesArmonicos y Seccion Del NeutrodardoNo ratings yet
- Guia de AprendizajeDocument6 pagesGuia de AprendizajeRut Saez MendozaNo ratings yet
- Diseño de PCB y NormasDocument3 pagesDiseño de PCB y Normasrey_hadesNo ratings yet
- Esp 8266Document23 pagesEsp 8266Otrebor RaplNo ratings yet
- Manual Español WachtDocument121 pagesManual Español Wachternesto.zuniga.enaNo ratings yet
- Control de Velocidad Con LabVIEW y Arduino - Docx (RESUMIDO)Document22 pagesControl de Velocidad Con LabVIEW y Arduino - Docx (RESUMIDO)Eugenio Puche SánchezNo ratings yet
- E1 - UF0426 - Chipana - AbnerDocument5 pagesE1 - UF0426 - Chipana - AbnerGénesis AvalosNo ratings yet
- Laboratorio Analizador de EspectroDocument7 pagesLaboratorio Analizador de EspectroJaime Nuñez ContrerasNo ratings yet
- Apuntes RedesDocument382 pagesApuntes RedesJorge Montellano50% (2)
- Manual de Manejo de Quartus Ii de Altera PDFDocument10 pagesManual de Manejo de Quartus Ii de Altera PDFJESUS ROBERTO SOLANO DURANNo ratings yet
- Nariz ElectronicaDocument2 pagesNariz ElectronicaMatías ÁvilaNo ratings yet
- Arduino Como Automata PLC - MikroplanDocument11 pagesArduino Como Automata PLC - Mikroplanerangeldiaz0% (1)
- Resumen de Montaje de Elementos, Neumaticos e HidraulicosDocument3 pagesResumen de Montaje de Elementos, Neumaticos e HidraulicosFelipe LlerenaNo ratings yet
- Node MCU ESP 8266 guíaDocument7 pagesNode MCU ESP 8266 guíaNicolas Valbuena0% (1)
- Tarjetas MDX SelenioDocument7 pagesTarjetas MDX SelenioJoel ChavezNo ratings yet
- Automatizacion IndustrialDocument12 pagesAutomatizacion IndustrialBrando RojasNo ratings yet
- Introducción A NI MultisimDocument17 pagesIntroducción A NI MultisimDemian Cashh MnheyNo ratings yet
- Mosfets y ArduinoDocument5 pagesMosfets y Arduinopeto ricNo ratings yet
- Batería De Magnesio: Avance para reemplazar el litio en las bateríasFrom EverandBatería De Magnesio: Avance para reemplazar el litio en las bateríasNo ratings yet
- Evolucion Del Sistema Celular Hacia UMTSDocument10 pagesEvolucion Del Sistema Celular Hacia UMTSpatrohellNo ratings yet
- Transmisión de Datos Via LaserDocument5 pagesTransmisión de Datos Via LaserpatrohellNo ratings yet
- Tipos de LaminadosDocument18 pagesTipos de LaminadospatrohellNo ratings yet
- FPGADocument39 pagesFPGApatrohellNo ratings yet
- Ensayo de PLCDocument10 pagesEnsayo de PLCpatrohellNo ratings yet
- HTTP CapturasDocument5 pagesHTTP CapturaspatrohellNo ratings yet
- AzimuthDocument9 pagesAzimuthpatrohellNo ratings yet
- Ensayo de PLCDocument10 pagesEnsayo de PLCpatrohellNo ratings yet
- Psicologia Del Desarrollo y Sus Aportes Al Compo de La EducacionDocument2 pagesPsicologia Del Desarrollo y Sus Aportes Al Compo de La EducacionSilviaNo ratings yet
- Area Del Prisma TriangularDocument2 pagesArea Del Prisma TriangularjesuscruzlopezNo ratings yet
- Acta de Inicio Contrato 6400017697Document2 pagesActa de Inicio Contrato 6400017697Andrés SierraNo ratings yet
- SACRAMENTOLOGÍADocument38 pagesSACRAMENTOLOGÍAFaiver Mañosca100% (5)
- Herencia MitocondrialDocument19 pagesHerencia MitocondrialAlondra EscuderoNo ratings yet
- Pronosticos Capitulo 5Document23 pagesPronosticos Capitulo 5normiuxesNo ratings yet
- Potencial Forestal en Quintana RooDocument40 pagesPotencial Forestal en Quintana RooAlejandro Lazaro Jimenez100% (1)
- Plan tutorial CETPRO Tarma 2017Document4 pagesPlan tutorial CETPRO Tarma 2017Cesar Augusto Buendia BaldeonNo ratings yet
- Tarea 9 Informatica.Document3 pagesTarea 9 Informatica.karen escalanteNo ratings yet
- Inducción General Del Uso de Osciloscopio y Multímetro en Los Sistemas de Inyección GasolinaDocument40 pagesInducción General Del Uso de Osciloscopio y Multímetro en Los Sistemas de Inyección GasolinaIsseiHyōdōNo ratings yet
- RDXDocument4 pagesRDXTroy WeberNo ratings yet
- EscaladeExperienciaSexualdeArizona PDFDocument1 pageEscaladeExperienciaSexualdeArizona PDFCarlos Campos Del BarcoNo ratings yet
- Semiología Del Lenguaje Oral ReligiosoDocument169 pagesSemiología Del Lenguaje Oral ReligiosoGerman OlacireguiNo ratings yet
- SLADE 3300C Empaque para Válvulas y Bombas: Empaque de Grafito Expandido de Alta PurezaDocument1 pageSLADE 3300C Empaque para Válvulas y Bombas: Empaque de Grafito Expandido de Alta PurezaMontserrat GuijarroNo ratings yet
- Problemas Propuestos de Analisis DimensionalDocument2 pagesProblemas Propuestos de Analisis DimensionalJans CabrejosNo ratings yet
- 6 - Caracterizacion de Procesos y Sus Interaciones - RyLDocument3 pages6 - Caracterizacion de Procesos y Sus Interaciones - RyLKaren Lizeth BermudezNo ratings yet
- 5.° Primaria - Literatura - Novelas Ejemplares. El Licenciado Vidriera (Material)Document4 pages5.° Primaria - Literatura - Novelas Ejemplares. El Licenciado Vidriera (Material)Cristóbal Eloy Márquez100% (1)
- RCD 088-2022-EmDocument23 pagesRCD 088-2022-EmJorgeCordovaNo ratings yet
- Costos y presupuestos: depreciación, cargas sociales, clasificación (40Document8 pagesCostos y presupuestos: depreciación, cargas sociales, clasificación (40Erick Rivas MirandaNo ratings yet
- Adios Plano Land I ADocument27 pagesAdios Plano Land I APauli Barrenechea100% (1)
- Taller ResueltoDocument6 pagesTaller ResueltoMarcelita Vera BarriaNo ratings yet
- Mf0178 - 1 Tecnicas de Confeccion de Cortinas Y Estores A DistanciaDocument14 pagesMf0178 - 1 Tecnicas de Confeccion de Cortinas Y Estores A DistanciaAbdiel JhosNo ratings yet
- Consejeria Cristiana EfectivaDocument15 pagesConsejeria Cristiana Efectivaclaudia Mileidy100% (1)
- Lectura T4 DerivadasDocument47 pagesLectura T4 DerivadasTristan Villanueva CoutiñoNo ratings yet
- Isaac Newton, la figura más resplendiente del siglo XVIIDocument11 pagesIsaac Newton, la figura más resplendiente del siglo XVIImvlsNo ratings yet
- Sintaxis y Expresión LiterariaDocument8 pagesSintaxis y Expresión LiterariaMarcela AlejandreNo ratings yet
- Referentes FormatoDocument7 pagesReferentes FormatoJorge Adrian BLANCO GELVEZNo ratings yet
- Irrigacion Cumbaza AgustinDocument19 pagesIrrigacion Cumbaza AgustinSheril ArévaloNo ratings yet
- Número de La EmpresaDocument6 pagesNúmero de La EmpresaCarito Costanza SepulvedaNo ratings yet