You might also like
- Cálculo I - DerivadasDocument15 pagesCálculo I - DerivadaslucianolcdNo ratings yet
- Matemática Ano 9 Cap.1-Parte 1Document34 pagesMatemática Ano 9 Cap.1-Parte 1Silvana S. GaglianoNo ratings yet
- Funções Quadráticas: Exercícios ResolvidosDocument5 pagesFunções Quadráticas: Exercícios ResolvidosEdneyNo ratings yet
- Matemática PPT - Aula 01 - Conjuntos e Operações ElementaresDocument9 pagesMatemática PPT - Aula 01 - Conjuntos e Operações ElementaresSulainepaivaNo ratings yet
- Matemática PPT - Aula 05 - Função ExponencialDocument9 pagesMatemática PPT - Aula 05 - Função ExponencialMatemática PPT100% (3)
- Matemática PPT - Polígonos IDocument13 pagesMatemática PPT - Polígonos IMatemática PPT100% (7)
- Matemática PPT - PolinômiosDocument16 pagesMatemática PPT - PolinômiosMatemática PPT92% (39)
- Matemática PPT - Polígonos IDocument13 pagesMatemática PPT - Polígonos IMatemática PPT100% (7)
- Curso Software QiIncendio 2018 PDFDocument137 pagesCurso Software QiIncendio 2018 PDFmarceloNo ratings yet
- 6 Capitulo - V - 6o Ano GABARITO2Document11 pages6 Capitulo - V - 6o Ano GABARITO2ApoenaAlencar100% (2)
- 9ºano-1 Semana Março PDFDocument10 pages9ºano-1 Semana Março PDFEduardoNo ratings yet
- Matemática: Equações do 1o e 2o GrauDocument60 pagesMatemática: Equações do 1o e 2o GrauRegiani Almeida RezendeNo ratings yet
- Matemática PPT - Aula 09 - Triângulo de PascalDocument11 pagesMatemática PPT - Aula 09 - Triângulo de PascalMatemática PPT100% (4)
- Trabalho IsometriasDocument10 pagesTrabalho IsometriasÂngelo MarianoNo ratings yet
- Funções matemáticas em Bernoulli ResolveDocument52 pagesFunções matemáticas em Bernoulli ResolveCelso BerredoNo ratings yet
- 9ano Ex Probabilidades Parte 2 13out2019Document4 pages9ano Ex Probabilidades Parte 2 13out2019Ana Cristina SilvaNo ratings yet
- Funções trigonométricas na modelagem de pressão arterialDocument2 pagesFunções trigonométricas na modelagem de pressão arterialMaria ClaraNo ratings yet
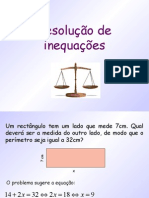
- Resolucao de InequacoesDocument12 pagesResolucao de Inequacoesprojectocm100% (2)
- Matematica Trigonometria Funcoes TrigonometricasDocument26 pagesMatematica Trigonometria Funcoes Trigonometricascecilia FaustinoNo ratings yet
- Matemática - Trigonometria - FT 3 Calculo VectorialDocument5 pagesMatemática - Trigonometria - FT 3 Calculo VectorialGeometria Ensino Médio100% (4)
- Geometria Euclidiana Plana Resolvido JoaDocument54 pagesGeometria Euclidiana Plana Resolvido JoaIsabel Soares de Melo100% (1)
- Áreas de figuras planasDocument13 pagesÁreas de figuras planasANDRÉ GARCIANo ratings yet
- Matemática - 9º Ano - Caderno 03Document60 pagesMatemática - 9º Ano - Caderno 03Diego SilvaNo ratings yet
- Graficos de FuncoesDocument18 pagesGraficos de FuncoesNilvanyNo ratings yet
- Função Quadrática - Estudo DomiciliarDocument90 pagesFunção Quadrática - Estudo DomiciliarEdinei ChagasNo ratings yet
- Equações incompletas do 2° grauDocument12 pagesEquações incompletas do 2° grauLucas Pontes de SouzaNo ratings yet
- Escola Secundária Rio Tinto n.o 3 - Revisão TrigonometriaDocument2 pagesEscola Secundária Rio Tinto n.o 3 - Revisão Trigonometrialara felgueirasNo ratings yet
- Funções compostas e irracionaisDocument26 pagesFunções compostas e irracionaisRicardo SantosNo ratings yet
- Matemática - 8º Ano - Caderno 02Document156 pagesMatemática - 8º Ano - Caderno 02Renato SalesNo ratings yet
- Geometria AnaliticaDocument2 pagesGeometria AnaliticaAmanda MiquiliniNo ratings yet
- Slide Aula 5, 6, 7 e 8 - Probabilidade e DistribuiçõesDocument84 pagesSlide Aula 5, 6, 7 e 8 - Probabilidade e DistribuiçõesrctrimerNo ratings yet
- Funções exponenciais e logarímicas: conceitos fundamentaisDocument17 pagesFunções exponenciais e logarímicas: conceitos fundamentaisDiogenes PereiraNo ratings yet
- Apostila DeterminantesDocument8 pagesApostila DeterminantesbruninguitNo ratings yet
- Exercícios Binômio de NewtonDocument1 pageExercícios Binômio de NewtonAlbert E. Da SilvaNo ratings yet
- Calculo 3 - Integrais Multiplas, Capos, Integrais de Linhas e Integrais de SuperficieDocument184 pagesCalculo 3 - Integrais Multiplas, Capos, Integrais de Linhas e Integrais de SuperficieJoão Victor de Assis FerreiraNo ratings yet
- MiniTeste 1 VADocument3 pagesMiniTeste 1 VAAlda Biscaia SantosNo ratings yet
- Ficha Formativa - Taxa de Variação de Uma Função e DerivadasDocument9 pagesFicha Formativa - Taxa de Variação de Uma Função e DerivadasSandra Cristina FernandesNo ratings yet
- Logaritmo ESA EEAR EAM 01 09 2021Document2 pagesLogaritmo ESA EEAR EAM 01 09 2021Sandro Carvalho100% (1)
- Movimento harmônico simples - resolução de atividadesDocument13 pagesMovimento harmônico simples - resolução de atividadesDias DiasNo ratings yet
- Análise Combinatória AtividadesDocument18 pagesAnálise Combinatória AtividadesDaniel Assis100% (1)
- Teste4 11anoDocument3 pagesTeste4 11anomj silva100% (1)
- Apostila de MU e MUVDocument14 pagesApostila de MU e MUVWesley Carvalho Carneiro IaquintoNo ratings yet
- Pa e PG EearDocument6 pagesPa e PG EearJullia LopesNo ratings yet
- Sequências matemáticas e números de FibonacciDocument36 pagesSequências matemáticas e números de FibonacciCharmilla FreireNo ratings yet
- Matemática - Questões - CBMAL-2021 - PDFDocument25 pagesMatemática - Questões - CBMAL-2021 - PDFfabricioNo ratings yet
- Matemática - Conjuntos Númericos - Funções FuncaoDocument6 pagesMatemática - Conjuntos Númericos - Funções FuncaoMatemática Mathclassy100% (8)
- Simetrias no plano cartesianoDocument4 pagesSimetrias no plano cartesianoJúlio César Miranda MartinsNo ratings yet
- Geometria Analitica 1Document3 pagesGeometria Analitica 1Ricardo Augusto100% (1)
- Aula 04Document26 pagesAula 04JoaoNo ratings yet
- EXERCÍCIOS RESOLVIDOS DE MATEMÁTICA - A CONQUISTA DA MATEMÁTICA - PG 241 - SEMELHANÇA DE TRIÂGULOSDocument2 pagesEXERCÍCIOS RESOLVIDOS DE MATEMÁTICA - A CONQUISTA DA MATEMÁTICA - PG 241 - SEMELHANÇA DE TRIÂGULOSherbet fonseca100% (4)
- Prova Modelo N.º 2Document5 pagesProva Modelo N.º 2Tiago SousaNo ratings yet
- Aproximações de números reaisDocument2 pagesAproximações de números reaisSandra RodriguesNo ratings yet
- Exercícios de revisão de raciocínio lógico e matemáticoDocument5 pagesExercícios de revisão de raciocínio lógico e matemáticoLuis GustavoNo ratings yet
- Funções Reais de Várias Variáveis: Introdução, Domínio e Curvas de NívelDocument240 pagesFunções Reais de Várias Variáveis: Introdução, Domínio e Curvas de NívelAlessandro FreitasNo ratings yet
- Prova A Calculo Diferencial ResolvidaDocument23 pagesProva A Calculo Diferencial ResolvidaLuiz Henrique de PaulaNo ratings yet
- Expressoes AlgebricasDocument7 pagesExpressoes AlgebricasEzsilvasilva SilvaNo ratings yet
- Ficha de Trabalho - Monómios, Polinómios e Equações Do 2ºgrauDocument3 pagesFicha de Trabalho - Monómios, Polinómios e Equações Do 2ºgrauelsarquesNo ratings yet
- Apostila Análise Combinatória e Binômio de NewtonDocument3 pagesApostila Análise Combinatória e Binômio de NewtonCláudio H. OliveiraNo ratings yet
- MDC e divisibilidade em números inteirosDocument42 pagesMDC e divisibilidade em números inteirosSara FariaNo ratings yet
- 38118-Geometria AnaliticaDocument87 pages38118-Geometria AnaliticaRodrigo Schneider0% (1)
- Aprovar Ano05 Livro21 009Document1 pageAprovar Ano05 Livro21 009Aprovar UEA ApostilasNo ratings yet
- 4 ExemplaresDocument6 pages4 ExemplaresOBerçodaCortiçaNo ratings yet
- Teoremas de continuidade e valores intermediáriosDocument22 pagesTeoremas de continuidade e valores intermediáriosAna VieiraNo ratings yet
- Matemática PPT - Geometria Plana Triângulos e ProporcionalidadeDocument6 pagesMatemática PPT - Geometria Plana Triângulos e ProporcionalidadeMatemática PPT100% (4)
- Matemática PPT - Aula 03 - Funções IIDocument10 pagesMatemática PPT - Aula 03 - Funções IIMatemática PPT100% (1)
- Matemática PPT - Aula FunçõesDocument15 pagesMatemática PPT - Aula FunçõesMatemática PPT100% (5)
- Matemática PPT - Resolução Problemas TeoriasDocument28 pagesMatemática PPT - Resolução Problemas TeoriasMatemática PPT100% (1)
- Matemática PPT - Aula 07 - Sequências PGDocument8 pagesMatemática PPT - Aula 07 - Sequências PGMatemática PPT100% (4)
- Matemática PPT - Geometria - Simetrias PontuaisDocument15 pagesMatemática PPT - Geometria - Simetrias PontuaisMatemática PPTNo ratings yet
- Matemática PPT - Geometria - VetoresDocument26 pagesMatemática PPT - Geometria - VetoresMatemática PPT100% (2)
- Matemática PPT - Aula 06 - Sequências PADocument10 pagesMatemática PPT - Aula 06 - Sequências PAMatemática PPT100% (1)
- Matemática PPT - SabadaoDocument14 pagesMatemática PPT - SabadaoMatemática PPTNo ratings yet
- Cálculo em Power PointDocument14 pagesCálculo em Power Pointtroca de informações100% (3)
- Matemática PPT - Aula 08 - FatorialDocument11 pagesMatemática PPT - Aula 08 - FatorialMatemática PPT100% (4)
- Matemática PPT - Aula 04 - LogaritmosDocument9 pagesMatemática PPT - Aula 04 - LogaritmosMatemática PPT100% (3)
- Matemática PPT - Regra de TrêsDocument5 pagesMatemática PPT - Regra de TrêsMatemática PPT100% (5)
- Matemática PPT - Aula 02 - Funções IDocument12 pagesMatemática PPT - Aula 02 - Funções IMatemática PPT100% (2)
- Matemática PPT - ProgressõesDocument8 pagesMatemática PPT - ProgressõesMatemática PPTNo ratings yet
- Matemática PPT - PA e PGDocument9 pagesMatemática PPT - PA e PGMatemática PPT100% (3)
- Matemática PPT - Números ComplexosDocument27 pagesMatemática PPT - Números ComplexosMatemática PPT80% (5)
- Matemática PPT - Multiplicações InteirosDocument9 pagesMatemática PPT - Multiplicações InteirosMatemática PPT100% (12)
- Matemática PPT - LogaritmosDocument11 pagesMatemática PPT - LogaritmosMatemática PPT100% (1)
- Matemática PPT - Lei Dos Senos e CosenosDocument7 pagesMatemática PPT - Lei Dos Senos e CosenosMatemática PPT100% (2)
- Matemática PPT - Geometria - Conceitos IIDocument22 pagesMatemática PPT - Geometria - Conceitos IIMatemática PPT100% (3)
- Matemática PPT - Informática - Casa Da MoedaDocument12 pagesMatemática PPT - Informática - Casa Da MoedaMatemática PPTNo ratings yet
- Projeções e Vistas - Harudgy - ListaDocument11 pagesProjeções e Vistas - Harudgy - ListaHarudgy AmanoNo ratings yet
- Lista de Matemática II - 2 SérieDocument5 pagesLista de Matemática II - 2 SérieFillipe AguiarNo ratings yet
- Geometria do Campo de FutebolDocument14 pagesGeometria do Campo de FutebolCamilly Dos SantosNo ratings yet
- Lista de Exercicios de Geometria de Posicao e Poliedros ConvexosDocument2 pagesLista de Exercicios de Geometria de Posicao e Poliedros ConvexosThiago Azevedo100% (2)
- Equações geométricas da retaDocument39 pagesEquações geométricas da retaSamara OliveiraNo ratings yet
- Aula 13 - TolerânciaDocument50 pagesAula 13 - TolerânciaalanfelipiNo ratings yet
- Relações Angulos - AEDocument92 pagesRelações Angulos - AEmarta.sil.martinsNo ratings yet
- ApostilaDocument63 pagesApostiladanidani23No ratings yet
- Geometria Espacial - Relações de Paralelismo e PerpendicularidadeDocument13 pagesGeometria Espacial - Relações de Paralelismo e PerpendicularidadeSamuel SilvaNo ratings yet
- Equações de retas e planosDocument7 pagesEquações de retas e planosFernando CruzNo ratings yet
- Lista 120Document16 pagesLista 120Erica ZavadzkiNo ratings yet
- Aula Prática de Mecânica Física IDocument3 pagesAula Prática de Mecânica Física ICatia VictoriaNo ratings yet
- Arquivos Exames de Matemática 10 Classe - MozescolaDocument15 pagesArquivos Exames de Matemática 10 Classe - MozescolanguenhadapaloNo ratings yet
- Soldagem e seus termosDocument68 pagesSoldagem e seus termosLeandro Camilo0% (1)
- Aula 15 - Estratégia ITADocument231 pagesAula 15 - Estratégia ITAKennedy Matheus100% (1)
- Geometria Curso Superior G. M. Bruño OcrDocument328 pagesGeometria Curso Superior G. M. Bruño Ocrjosedeviana92% (13)
- 04-Geometria Da Ferramenta de CorteDocument29 pages04-Geometria Da Ferramenta de CorteDaniel PontesNo ratings yet
- Representação Ponto RectaDocument37 pagesRepresentação Ponto RectasusanaNo ratings yet