You might also like
- Actuators: Motion Characteristics of A Clutch Actuator For Heavy-Duty Vehicles With Automated Mechanical TransmissionDocument25 pagesActuators: Motion Characteristics of A Clutch Actuator For Heavy-Duty Vehicles With Automated Mechanical TransmissionNgọc ĐạiNo ratings yet
- Control of Gear Shifts in Dual Clutch Transmission PowertrainsDocument14 pagesControl of Gear Shifts in Dual Clutch Transmission PowertrainsOday AliNo ratings yet
- Shift Dynamics and Control of Dual-Clutch Transmissions: Mechanism and Machine TheoryDocument15 pagesShift Dynamics and Control of Dual-Clutch Transmissions: Mechanism and Machine Theorydarshan911No ratings yet
- 1 s2.0 S0888327017305654 MainDocument10 pages1 s2.0 S0888327017305654 MainchinnavenkateswarluNo ratings yet
- Gearshift Control Algorithm Improves Dry Dual-Clutch TransmissionsDocument10 pagesGearshift Control Algorithm Improves Dry Dual-Clutch TransmissionsHoang LongNo ratings yet
- Modelling of an automated manual transmission systemDocument19 pagesModelling of an automated manual transmission systemJEFFERSSON DAVID BASTIDAS GAONANo ratings yet
- 6272654cb8f796 24568097Document4 pages6272654cb8f796 24568097achuc2009No ratings yet
- 2016 - 1. (Parameter - Design - and - Performance - Analysis - of - Shift - Actuator... )Document15 pages2016 - 1. (Parameter - Design - and - Performance - Analysis - of - Shift - Actuator... )Shivam KohliNo ratings yet
- Acc 2014 6858933Document7 pagesAcc 2014 6858933mohammad ghaderzadehNo ratings yet
- A Study On Dual Clutch Transmission: P. P. Patnaik & Bhabani S. MahantoDocument6 pagesA Study On Dual Clutch Transmission: P. P. Patnaik & Bhabani S. MahantoTJPRC PublicationsNo ratings yet
- Clutch Lock Up Model - 01fe20bei018Document6 pagesClutch Lock Up Model - 01fe20bei018ramakrishnasj55No ratings yet
- Modelling and Simulation of Automatic TransmissionDocument11 pagesModelling and Simulation of Automatic TransmissionInternational Journal of Innovative Science and Research Technology100% (1)
- Challenges and Opportunities in Automotive Transmission ControlDocument6 pagesChallenges and Opportunities in Automotive Transmission ControlArnabGhoshNo ratings yet
- TCST 2016 2620421Document9 pagesTCST 2016 2620421mohammad ghaderzadehNo ratings yet
- Slip Control During Inertia Phase of Clutch-To-Clutch ShiftDocument12 pagesSlip Control During Inertia Phase of Clutch-To-Clutch ShiftthisisjineshNo ratings yet
- Mechanism and Machine Theory: Hanqi Yue, Chenyi Zhu, Bingzhao GaoDocument13 pagesMechanism and Machine Theory: Hanqi Yue, Chenyi Zhu, Bingzhao GaoAnthonyRivasNo ratings yet
- Modeling and Simulation of Steering Control Strategy For Dual MotorDocument11 pagesModeling and Simulation of Steering Control Strategy For Dual Motorالفريق الدباش WalliNo ratings yet
- A Study of Maximum Power Operation For Engine in Continuously Variable Transmission PowertrainDocument4 pagesA Study of Maximum Power Operation For Engine in Continuously Variable Transmission PowertrainSanjeev RanjanNo ratings yet
- EVS28: Economic Hybrid Transmission Using Clutchless ManualDocument6 pagesEVS28: Economic Hybrid Transmission Using Clutchless ManualTechmate TechnologiesNo ratings yet
- Modeling Torque ConvDocument11 pagesModeling Torque ConvDiego HidalgoNo ratings yet
- Speed Variation Using Cone Ring Traction DriveDocument7 pagesSpeed Variation Using Cone Ring Traction DriveKedar DhongadeNo ratings yet
- Review of Comparative Analysis of Speed Control Techniques of BLDC & PMSM MotorDocument9 pagesReview of Comparative Analysis of Speed Control Techniques of BLDC & PMSM MotorIJRASETPublicationsNo ratings yet
- Imaaca2013 44Document8 pagesImaaca2013 44mohammad ghaderzadehNo ratings yet
- Sliding Mode Control of Induction Motor ThesisDocument6 pagesSliding Mode Control of Induction Motor Thesiss0kuzej0byn2100% (2)
- Sliding ModeDocument13 pagesSliding ModeSiva Ganesh MallaNo ratings yet
- Abvı01597172Document11 pagesAbvı01597172cakirmeNo ratings yet
- IRJET Research On Clutchless Quick GearDocument3 pagesIRJET Research On Clutchless Quick Gearscdindar3838No ratings yet
- Liu 2012Document7 pagesLiu 2012mohammad ghaderzadehNo ratings yet
- Application of Moving Sliding Mode Control For A DDocument13 pagesApplication of Moving Sliding Mode Control For A DWellington LucioNo ratings yet
- The Seamless Gear Shifting Control For Pure Electric Vehicle With 2-Speed Inverse-AMTDocument5 pagesThe Seamless Gear Shifting Control For Pure Electric Vehicle With 2-Speed Inverse-AMTmihai_1957No ratings yet
- Engineering Reports - 2021 - Zhao - Concept of A New Overrunning Clutch With The Characteristic of Reverse Force TransferDocument13 pagesEngineering Reports - 2021 - Zhao - Concept of A New Overrunning Clutch With The Characteristic of Reverse Force TransfervelmuruganNo ratings yet
- Research paper 4Document1 pageResearch paper 4abrakadabra2401No ratings yet
- Enhancement of Vehicle StabilityDocument11 pagesEnhancement of Vehicle Stabilityakareem1755No ratings yet
- Optimisation of An Algorithm For Automatic Control of Transmission in A Wheeled TractorDocument10 pagesOptimisation of An Algorithm For Automatic Control of Transmission in A Wheeled TractorZamzam DiamelNo ratings yet
- 006 17-118 OlDocument6 pages006 17-118 OlLan Phuong NguyenNo ratings yet
- Modeling of Wheels and TiresDocument8 pagesModeling of Wheels and TireswhereareyoudearNo ratings yet
- Design a Model Free Cruise Control for Autonomous VehiclesDocument6 pagesDesign a Model Free Cruise Control for Autonomous VehiclestrisinoNo ratings yet
- Car Wheel Slip Modelling Simulation and Control Us PDFDocument4 pagesCar Wheel Slip Modelling Simulation and Control Us PDFThien MaiNo ratings yet
- Development of A New Traction ControlDocument12 pagesDevelopment of A New Traction ControlMozãoFragaNo ratings yet
- Dual Clutch Transmission ExplainedDocument22 pagesDual Clutch Transmission Explainedlhooks.infyNo ratings yet
- Study On Stability and Handling Characteristics AnDocument15 pagesStudy On Stability and Handling Characteristics Anlinh quangNo ratings yet
- DC MOTOR POSITION CONTROL FOR ELECTROMECHANICAL DUAL ACTING PULLEY CVTDocument11 pagesDC MOTOR POSITION CONTROL FOR ELECTROMECHANICAL DUAL ACTING PULLEY CVTzulfikarzaidNo ratings yet
- Development of Two-Speed Dual-Clutch Transmission For Seamless Gear Shifting in EVsDocument9 pagesDevelopment of Two-Speed Dual-Clutch Transmission For Seamless Gear Shifting in EVsThiên ThanhNo ratings yet
- IJEART03703Document4 pagesIJEART03703anil kasotNo ratings yet
- Fault-Tolerant Stability Control For Independent Four-Wheel Drive Electric Vehicle Under Actuator Fault ConditionsDocument11 pagesFault-Tolerant Stability Control For Independent Four-Wheel Drive Electric Vehicle Under Actuator Fault ConditionsDRISHYANo ratings yet
- Automotive Chassis TestingDocument2 pagesAutomotive Chassis TestingWilliam GrecoNo ratings yet
- Research Article: A DSP-Controlled Permanent Magnet Synchronous Motor Control System For Hybrid VehiclesDocument9 pagesResearch Article: A DSP-Controlled Permanent Magnet Synchronous Motor Control System For Hybrid VehiclesMeryouma LarbNo ratings yet
- Volltext PDFDocument11 pagesVolltext PDFa.monem ShoalaNo ratings yet
- Robust Yaw Stability Controller Design and Hardware-In-The-Loop Testing For A Road VehicleDocument18 pagesRobust Yaw Stability Controller Design and Hardware-In-The-Loop Testing For A Road VehicleBejai Alexander MathewNo ratings yet
- Optimal control of gear shifts improves automatic transmission performanceDocument20 pagesOptimal control of gear shifts improves automatic transmission performanceJosé Alberto PadillaNo ratings yet
- 1 PBDocument8 pages1 PBMatthew SmithNo ratings yet
- On Powertrain Oscillation Damping Using Feedforward and LQ Feedb PDFDocument6 pagesOn Powertrain Oscillation Damping Using Feedforward and LQ Feedb PDFBobeică Iustin CătălinNo ratings yet
- Driving Modes For Designing The Cornering Response of Fully Electric Vehicles With Multiple MotorsDocument15 pagesDriving Modes For Designing The Cornering Response of Fully Electric Vehicles With Multiple MotorsAndrea FontanaNo ratings yet
- Differential Steering-Based Electric Vehicle Lateral Dynamics Control With Rollover ConsiderationDocument11 pagesDifferential Steering-Based Electric Vehicle Lateral Dynamics Control With Rollover Considerationsamsaptak ghoshNo ratings yet
- Literature Review of Speed Control of DC Motor Using ChopperDocument6 pagesLiterature Review of Speed Control of DC Motor Using ChopperafmzumwfxexgaoNo ratings yet
- Control Engineering Practice journal launches motorcycle clutch control approachDocument11 pagesControl Engineering Practice journal launches motorcycle clutch control approachJohn ByroNo ratings yet
- Manual TransmissionDocument5 pagesManual Transmissionstolen mechieducNo ratings yet
- Introduction to Hybrid Vehicle System Modeling and ControlFrom EverandIntroduction to Hybrid Vehicle System Modeling and ControlRating: 4 out of 5 stars4/5 (1)
- Synchromesh MechanismDocument7 pagesSynchromesh MechanismZein ElserfyNo ratings yet
- Midterm Exam: ME 322 Machine Elements 2Document1 pageMidterm Exam: ME 322 Machine Elements 2Mark Cecil TanoNo ratings yet
- Luk Repair Solution For Dry Double Clutches: Disassembly and AssemblyDocument46 pagesLuk Repair Solution For Dry Double Clutches: Disassembly and AssemblyBadulescu GabrielNo ratings yet
- S&T TM (T14S10) PDFDocument13 pagesS&T TM (T14S10) PDFFrezgi BirhanuNo ratings yet
- Worm Gear Calculation PDFDocument19 pagesWorm Gear Calculation PDFvrushabhNo ratings yet
- PERT Technical Book PDFDocument88 pagesPERT Technical Book PDFLUIS ANTONIO UTRIA RINCONNo ratings yet
- LTM1200 en PDFDocument10 pagesLTM1200 en PDFdepi_rachmanNo ratings yet
- ME3491 Course PlanDocument9 pagesME3491 Course Planmanoj1316kumar_63152No ratings yet
- 8 SeareyLSA - Electric Landing Gear Assy 2014-08-14 PDFDocument16 pages8 SeareyLSA - Electric Landing Gear Assy 2014-08-14 PDFАлексей Крамар100% (1)
- GR5-018 - Falk Cast Gear Blanks - Product SheetDocument2 pagesGR5-018 - Falk Cast Gear Blanks - Product SheetRamonNo ratings yet
- WC357 Gear Deburring Brochure - RGB - 2-16Document6 pagesWC357 Gear Deburring Brochure - RGB - 2-16novkovic1984No ratings yet
- Brochure C6 Drill Rig English 202112Document11 pagesBrochure C6 Drill Rig English 202112Federico RodriguezNo ratings yet
- Design and Analysis of Electric Vehicle Gearbox and DifferentialDocument8 pagesDesign and Analysis of Electric Vehicle Gearbox and DifferentialDilshan PriyadarshanaNo ratings yet
- Student Handbook 2014Document57 pagesStudent Handbook 2014Karan BothraNo ratings yet
- Acoplamientos DodgeDocument60 pagesAcoplamientos DodgeAlvaro Felipe CharlinNo ratings yet
- 13 Ways To Kill A Mechanical Seal FINALDocument16 pages13 Ways To Kill A Mechanical Seal FINALRanjit Koshy AlexanderNo ratings yet
- Workshop Practice Series-Vertical Milling in The Home Workshop PDFDocument49 pagesWorkshop Practice Series-Vertical Milling in The Home Workshop PDFJ. Ruiz100% (1)
- SOP-TN-001 Rev. 21 T5 Operation and Service ManualDocument28 pagesSOP-TN-001 Rev. 21 T5 Operation and Service ManualLuis MouraNo ratings yet
- A Text Book On Automobile Chassis and Body Engineering (ADocument58 pagesA Text Book On Automobile Chassis and Body Engineering (Ahunny29100% (2)
- 4560 E 2 TCM 12-73081 PDFDocument78 pages4560 E 2 TCM 12-73081 PDFVanessa Pajares LanciatoNo ratings yet
- Heinzmann Basic Systems E 1-F / E 2-F: Electronic Speed GovernorsDocument51 pagesHeinzmann Basic Systems E 1-F / E 2-F: Electronic Speed GovernorsAbdallah MiidouneNo ratings yet
- Dynamic Characteristics of Epicyclic Gear SystemDocument77 pagesDynamic Characteristics of Epicyclic Gear Systemkaajemaina195No ratings yet
- Lesson 3: Power Train Drive SystemsDocument12 pagesLesson 3: Power Train Drive SystemsMaimun maimunNo ratings yet
- Design of ShaftDocument16 pagesDesign of ShaftVPSureshKumar100% (1)
- Kubota B1700, B2100, B2400 WSM Part 2 - Brake AssemblyDocument233 pagesKubota B1700, B2100, B2400 WSM Part 2 - Brake AssemblyBenoît MARTINNo ratings yet
- How lifts work: components and systemsDocument4 pagesHow lifts work: components and systemsmikko intalNo ratings yet
- L7S Guidebook PDFDocument85 pagesL7S Guidebook PDFsmj_jaNo ratings yet
- Industrial Gas Generator Illustrated Parts CatalogueDocument12 pagesIndustrial Gas Generator Illustrated Parts CataloguejuanaNo ratings yet
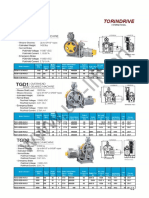
- Torin Drive ManualDocument9 pagesTorin Drive ManualRebecca DangNo ratings yet
- I Mold Product Overview Servomold Ver1.0 enDocument8 pagesI Mold Product Overview Servomold Ver1.0 enInderjeet SinghNo ratings yet