Professional Documents
Culture Documents
RD9 - Accelerometer Needs For IMU - Final Report 23mar09
RD9 - Accelerometer Needs For IMU - Final Report 23mar09
Uploaded by
llq_nudtOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
RD9 - Accelerometer Needs For IMU - Final Report 23mar09
RD9 - Accelerometer Needs For IMU - Final Report 23mar09
Uploaded by
llq_nudtCopyright:
Available Formats
Reference:
Date:
Issue 1
100329339E
25/03/2009
Page i
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Accel er ometer Needs for IMU
ESA contract 21221/ 07/ NL/ ST
Fi nal Repor t
Written by Responsibility/signature
S. Clerc
Verified by
Pierre-Yves Renaud AOCS Department Manager
Approved by
Sbastien CLERC Study manager
Approved by
Stphane DUSSY ESA Project Manager
Reference:
Date:
Issue 1
100329339E
25/03/2009
Page ii
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
CHANGE RECORDS / ENREGISTREMENT DES EVOLUTIONS
ISSUE DATE CHANGE RECORDS / DESCRIPTION DES
EVOLUTIONS
AUTHOR
1 25/03/2009 First Issue S.C.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page a
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
TABLE OF CONTENTS
1. Introduction..................................................................................................................... 2
1.1. Purpose................................................................................................................... 2
1.2. References.............................................................................................................. 2
1.2.1. Applicable documents....................................................................................... 2
1.2.2. Reference documents....................................................................................... 2
1.3. Acronyms & abbreviations....................................................................................... 2
2. Introduction..................................................................................................................... 4
2.1. Background and motivation ..................................................................................... 4
2.2. Presentation of the industrial team........................................................................... 5
2.3. Study logic............................................................................................................... 5
3. Technical requirements and main trade-offs ................................................................... 7
3.1. Accelerometers for orbit control ............................................................................... 7
3.2. Accelerometer needs for aerobraking...................................................................... 9
3.3. Accelerometer needs for Entry, Descent and Landing (EDL) ................................... 9
3.4. Accelerometer needs for rover navigation.............................................................. 12
4. Synthesis of requirements and identified products........................................................ 15
4.1. Summary of requirements and drivers................................................................... 15
4.2. Accelerometer classes........................................................................................... 15
4.3. Accelerometer performance requirements............................................................. 17
Measurement range and resolution........................................................................... 17
Bandwidth................................................................................................................. 17
Noise......................................................................................................................... 18
Bias and bias stability................................................................................................ 18
Scale factor and alignment stability........................................................................... 18
Interface.................................................................................................................... 18
Mass and power........................................................................................................ 18
Environment requirements ........................................................................................ 18
5. Survey of accelerometer technologies, performances and trends................................. 20
6. Simulation of IMU performances for a landing mission.................................................. 23
6.1. Description of the simulation tool ........................................................................... 23
6.2. Attitude update ...................................................................................................... 23
6.3. Velocity and position update.................................................................................. 24
6.4. Coast phase .......................................................................................................... 24
6.5. EDL ....................................................................................................................... 25
7. Preliminary design of an IMU for space applications..................................................... 28
7.1. MEMS IMU architecture......................................................................................... 28
7.2. Stand alone accelerometer architecture................................................................. 30
7.3. Budgets ................................................................................................................. 30
8. Preliminary development plan....................................................................................... 32
8.1. Products and schedule .......................................................................................... 32
8.2. Accelerometer development activities.................................................................... 32
8.3. IMU development activities.................................................................................... 33
8.4. Stand Alone Accelerometer development activities................................................ 33
9. Conclusion.................................................................................................................... 35
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 1
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 2
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
1. Introduction
1.1. Purpose
This document presents the main outcomes of the ESA study Accelerometer Needs for IMU
performed in the frame of contract 21221/07/NL/ST.
1.2. References
1.2.1. Applicable documents
[AD-1] Statement of Work of Invitation to Tender AO 03.07.2007, ESA/TEC-ECC/4.07
Issue 1. rev. 4, 2007
[AD-2] TAS Proposal, Ref. 8774145, 2007.
1.2.2. Reference documents
[RD-1.]
Accelerometer Needs for IMU: TN1 IMU and accelerometer needs for space applications,
Issue 3, TAS report n100245522W, 2008.
[RD-2.]
D. Gendre, V. Josselin, S. Dussy, High-performance accelerometer for on-orbit spacecraft
autonomy, AIAA 2004-5432, AIAA Guidance, Navigation, and Control Conference and
Exhibit, 16 - 19 August 2004, Providence, Rhode Island.
[RD-3.]
R.H. Tolson et al., Application of Accelerometer Data to Atmospheric Modeling During
Mars Aerobraking Operations, Georgia Institute of Technology, Atlanta, April 2007.
[RD-4.] Lauro Ojeda, Giulio Reina, Daniel Cruz and Johann Borenstein, University of Michigan,
The FLEXnav Precision Dead-reckoning System, International Journal of Vehicle
Autonomous Systems (IJVAS), Special Issue on "Computational Intelligence and Its
Applications to Mobile Robots and Autonomous Systems., 4, No. 2-4, 2006, pp. 173-195.
[RD-5.] Durrant, D., Dussy, S., Shackleton, B., and Malvern, A., MEMS Rate Sensor Becomes a
Reality, AIAA Guidance, Navigation, and Control Conference, AIAA, Hilton Head, NC,
2007.
[RD-6.] P.G. Savage, Strapdown Inertial Navigation Integration Algorithm Design Part1: Attitude
Algorithms, J. Guidance, Control and Dynamics, 21, 1, 1998.
[RD-7.] P.G. Savage, Strapdown Inertial Navigation Integration Algorithm Design Part 2: Velocity
and Position Algorithms, J. Guidance, Control and Dynamics, 21, 2, 1998.
1.3. Acronyms & abbreviations
In this document the following acronyms & abbreviations (in addition to standard SI units) are
or may be used:
AOCS Attitude and Orbit Control System
ASIC Application-Specific Integrated Circuit
CDR Critical Design Review
DM Descent Module
EDL Entry, Descent and Landing
EIP Entry Interface Point
EM Engineering Model
FDI Failure Detection and Isolation
FOG Fiber Optic Gyroscope
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 3
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
FPGA Field Programmable Gate Array
g Earth gravitational acceleration at sea level (9.80665 m/s)
GNC Guidance, Navigation and Control
GNSS Global Navigation Satellite System
HRG Hemi-spherical Resonating Gyroscope
IC Integrated Circuit
IMU Inertial Measurement Unit
MEMS Micro-Electro-Mechanical System
PCB Printed Circuit Board
PDR Preliminary Design Review
PFM Proto-Flight Model
ppm Parties per million (10
-6
)
SOI Silicon On Insulator
TRB Technical Review Board
VBA Vibrating Beam Accelerometer
VHDL Very high speed integrated circuit Hardware Description Language
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 4
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
2. Introduction
2.1. Background and motivation
During the last decade, the European Space Agency has promoted the development of
inertial navigation sensors in Europe. This effort has been met with success for the European
space industry, both from the point of view of technology and commercially. In the field of
gyroscopes, the following sensors have been developed:
High accuray Fiber Optic Gyros (FOG) (10
-3
deg/h class) with applications to Science or
Earth Observation missions requiring accurate pointing. This gyro family (Astrix)
completed its qualification and will be embarked on Galileo in-orbit validation satellites,
Planck, Aeolus, Gaia and Pleiades.
Medium performance Hemispherical Resonator Gyro (HRG)
(0.5 deg/h class) with
applications to Telecom missions with not too demanding pointing requirement. The
qualification of this gyro (REGYS-20), selected for the geostationary platforms Alphabus
and Spacebus 4000, will be completed in 2010.
Coarse MEMS Rate Sensor covering the low performance needs (5 deg/h class), for all
missions requiring rate damping, slew maneuvers, Earth or Sun acquisition, Failure
Detection and Identification (FDI), safe mode or coarse navigation functions. The
qualification of this gyro, selected for the Earth Observation mission Sentinel-3, will be
completed in 2010.
On the other hand, no space qualified European navigation accelerometer exists on the
market today, either in stand-alone configuration or integrated in an Inertial Measurement
Unit (IMU). This has led the European Space Agency to initiate an accelerometer/IMU
development effort. The present study has been the first step in this direction.
The development of the European accelerometer/IMU will support the implementation of
future European missions involving aerobraking, deep space maneuvers and fine orbit
control (for rendezvous, station keeping, coarse formation flying), but most of all landers and
rovers.
A case in point is the Exomars mission, the first European mission of the Aurora program of
robotic exploration. The Aurora missions involve a strong technology development content
which can act as building blocks to eventually support human space exploration. Technology
demonstration objectives include Entry, Descent and Landing (EDL) of a large payload on
the surface of Mars and surface mobility via a Rover having several kilometres of mobility
range. In parallel, important scientific objectives will be accomplished through a state-of-the
art scientific payload such as the search for traces of past and present life and the
characterisation of the water/geochemical environment as a function of depth in the shallow
subsurface.
Thanks to their low cost and mass, accelerometers could also be used for other applications
such as support of spin-stabilized spacecraft or monitoring of flexible modes.
Micro Electro Mechanical System (MEMS) technology has been identified early on as a most
promising path for a future European space accelerometer, a fact which was confirmed by
the present study. Indeed, the technology is now ubiquitous in Earth applications
(automotive, mining and petroleum industry, aeronautics, entertainment, medical an military
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 5
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
applications). They cover the whole range of performances, from low-cost coarse
inclinometers used in mass market applications to high-end navigation products, with the
possible exception of very fine resolution sensors (sub-g). In terms of MEMS accelerometer
technology, pendulum accelerometers with capacitive read-out are the most common. Most
of the manufacturing techniques (micromachining, wet or dry etching for silicon) are well
mastered by European manufacturers. Some European manufacturers also master Vibrating
Beam Accelerometer technology, either with piezoelectric readout (quartz) or capacitive
(silicon), mostly devoted to military applications.
The present study tried to identify the most promising sensor technologies, as well as the
development effort needed to bring a sensor to space qualification.
2.2. Presentation of the industrial team
The present study was managed by Thales Alenia Space France, acting as prime contractor.
The technical contribution was focused on the study of accelerometer uses for space
applications and the derivation of IMU and accelerometer requirements. In a second phase,
Thales Alenia Space France evaluated the expected performances of the proposed IMU for
EDL applications through numerical simulation.
The development of the simulation tool was supported by the Thales Aerospace division,
who brought their knowledge of inertial navigation systems and algorithms. Thales is a major
provider of inertial navigation solutions for aeronautics, launchers and military applications.
The requirements analysis was supported by Thales Alenia Space Italy. More specifically,
the Italian team focused on Entry Descent and Landing, Rover navigation, launchers and
science applications, building on the experience of the Exomars mission design, as well as
science missions such as GOCE.
MEMSCAP studied the existing accelerometer technology, products and manufacturers on
the current market and the evolution trends. In a second phase of the study, they proposed a
preliminary sizing of a MEMS accelerometer, and helped to define a mathematical model of
the sensor. MEMSCAP is a French MEMS manufacturer located in Grenoble, with business
units in Norway and in the USA. MEMSCAP products address a large variety of markets,
including wireless and optical communications, medical devices, and microphones.
MEMSCAP brought to the industrial team their knowledge of both mass market and high-end
MEMS products, as well as their mastering of design, production and testing issues.
The preliminary design and the development plan of the future IMU was studied by SEA in
Bristol, UK. SEA is a provider of advanced technology solutions for space, marine, defense
and transportation. More specifically, SEA has a recognized expertise in the development,
manufacturing and testing of space electronics. SEA, with the support of AIS, is responsible
for the development of the MEMS rate sensor SiREUS.
2.3. Study logic
The study was decomposed into three main phases:
In a first phase, accelerometer needs for space mission were studied. In parallel, a
market and technology survey identified the most adequate products and technology. At
the end of this phase, accelerometer products were identified as meeting point(s)
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 6
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
between technology and needs. This phase also identified the most promising
technologies, and the crucial design parameters. At the end of this phase, it appeared
that a MEMS accelerometer could meet most space applications needs, and in particular
EDL, rover navigation, aerobraking and support of chemical propulsion. Silicon vibrating
beam and silicon capacitive technologies were considered the most promising.
A second phase of the study was devoted to the verification of the expected performance
of the IMU. A main outcome of this phase was the selection of a candidate gyro to build a
future European IMU. Whereas performances for a stand alone accelerometer can be
evaluated by simple computations, the end-to-end performance of an IMU during an EDL
mission for instance requires a detailed dynamic simulations, taking into account
navigation algorithm performance and environmental constraints (mainly thermal). At the
end of this phase, it was decided to select the SiREUS MEMS rate sensor as a basis for
the preliminary IMU design. Accelerometer technical requirements were consolidated and
a specification document was issued.
The third phase dealt with the preliminary design and development plan. This activity
addressed such issues as selection of space-compatible electronics for the MEMS
accelerometer, as well as mechanical and electronic design of the IMU, based on the
current SiREUS unit. Concerning the development plan, it was decided to focus on the
spatialization of a MEMS accelerometer with a good level of maturity rather than starting
a new sensor development.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 7
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
3. Technical requirements and main trade-offs
Accelerometers are able to determine the non-gravitational acceleration of a vehicle in a
vehicle-fixed frame. In order to be used as an inertial navigation sensor, the accelerometer
must be completed by a gyro to recover the attitude of the vehicle in the inertial reference
frame, and a gravity model to estimate the gravitational acceleration. For other uses, the
accelerometer can be used as a stand-alone sensor. This is the case, for instance, if one
wants to monitor a force with a known orientation in the vehicle frame: propulsion monitoring,
atmospheric drag for parachute opening and, to a lesser extent, aerobraking. However a low-
cost gyro could make an inertial measurement unit more interesting than a stand-alone gyro
even in these cases.
When estimating the requirements for an inertial navigation system, it is crucial to compare it
with alternative navigation solutions. These include GNSS navigation for low Earth Orbit
missions, radio-navigation for geostationary or interplanetary missions, and relative
navigation sensors (cameras, lidars, radars) for interplanetary approach, landing and rovers
as well as rendez-vous and formation flying missions. The benefits of the IMU navigation rely
on its relatively low cost and weight, its robustness, while the main drawback is the long term
drift due to the double integration needed to determine the position.
3.1. Accelerometers for orbit control
A first type of usage of on-board accelerometers is for propulsive orbit control. More
specifically, the following uses can be distinguished:
Failure detection. A typical case is the detection of a main engine anomaly during a time-
critical maneuver such as planetary orbit insertion. A reconfiguration to a back-up
propulsion system can be triggered if the anomaly is detected fast enough. Some
accelerometer redundancy is required in order to discriminate between propulsion and
accelerometer failure. A possible solution consists in placing the three-axis accelerometer
set in a skewed configuration with respect to the propulsion axis. Performance
requirements are relatively mild in this case, even taking into account large confidence
intervals to avoid false alarms.
Navigation: in this case the accelerometer is used to improve the a posteriori knowledge
of the executed V maneuver, which in turns improves the future orbit propagation
accuracy. This can be useful for instance for a nadir-pointing orbital mission, to determine
more accurately the nadir direction.
V execution control: in this last case, the propulsion burn is stopped when the
commanded V has been reached. This is possible only when the burn lasts
(significantly) more than the accelerometer readout period.
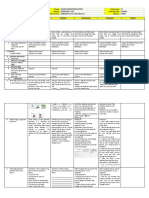
Since the acceleration is nearly constant during the V execution, the accelerometer
performance requirements for orbit control can be easily analyzed by summing the
contribution of the various error sources thanks to a simple spreadsheet, see example in
Figure 3-1. The accelerometer characteristics can be optimized so as to meet the
requirements for the largest class of maneuvers.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 8
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
CASE V = 0.1 m/s
Required precision 1.0%
confidence interval 3
Resulting precision @ 1
3.33E-04 m/s
Thruster acceleration 0.075 m/s
Manoeuvre time 1.326 s
Meas. Frequency 10.0 Hz
Number of meas. 14
Error budget
measurement
error [m/s]
Scale factor 500 ppm 5.00E-05
Non-linearity 300 g/g 2.22E-05
Bias (calibrated) 3.2 g 4.20E-05
Bias drift 45 g/hr 1.08E-07
White noise 20 g/ Hz 2.26E-04
Read out noise 0.06 mm/s 2.24E-04
Misalignment 500 rad 5.00E-05
RSS 3.30E-04
contribution
0.0E+00
5.0E-05
1.0E-04
1.5E-04
2.0E-04
2.5E-04
3.0E-04
3.5E-04
S
c
a
l
e
f
a
c
t
o
r
N
o
n
-
l
i
n
e
a
r
i
t
y
B
i
a
s
(
c
a
l
i
b
r
a
t
e
d
)
B
i
a
s
d
r
i
f
t
W
h
i
t
e
n
o
i
s
e
R
e
a
d
o
u
t
n
o
i
s
e
M
i
s
a
l
i
g
n
m
e
n
t
Figure 3-1: Example of a measurement error budget for a 0.1 m/s trajectory control maneuver.
When analyzing the requirements for orbit control, the main parameters are the effective
acceleration and the length of the burn. Accelerations vary from 0.5 m/s for a main engine to
0.1 mm/s for cold gas thrusters or electric propulsion, with a direct impact on the required
accelerometer resolution. Longer burns are easier to measure because the measurement
noise is filtered over the integration time. The bias stability in itself is never a critical aspect
even for very long burns (orbit insertion). On the other hand measuring small accelerations
require a careful bias calibration beforehand. The required calibration residual places an
indirect requirement on the bias stability.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 9
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Low thrust propulsion (electric propulsion and cold gas) is a very specific case. Applications
could include fine formation control, autonomous station-keeping for geostationary and
Lagrange point missions, and interplanetary cruise. The very low acceleration requires a fine
resolution accelerometer, in the m/s range. While geostationary station keeping requires a
bandwidth of about 1 Hz, interplanetary missions involve very long thrust arcs (10
-4
Hz). A
multi-mission accelerometer for electric propulsion support should therefore have a
measurement bandwidth of at least [10
-4
: 1] Hz.
3.2. Accelerometer needs for aerobraking
Since the pioneering Magellan aerobraking mission at Venus (1993), the role of
accelerometers to support aerobraking operations has steadily increased. Originally seen as
an engineering sensor to monitor the structural load on spacecraft surfaces, its role has been
extended to autonomous inertial navigation and to the determination of atmospheric
properties for science purposes. The recent Mars Reconnaissance Orbiter mission has been
equipped with a high-precision accelerometer (resolution of 5 m/s), allowing an
unprecedented measurement of the atmospheric drag [RD-3.]
We have analyzed the performance requirements for an aerobraking mission. For
autonomous inertial navigation, a 1 mm/s resolution seems sufficient, although a general
trend toward more autonomy during aerobraking could lead to more demanding
requirements in the future.
The determination of atmospheric properties (density and wind) on the other hand could in
principle benefit from a finer resolution. However the precision of the determination is limited
by a number of system-level errors and biases. The first and probably the most important
one is the uncertainty on the aerodynamics coefficient database used to recover the density
from the drag. The position uncertainty coming from the inertial navigation process has also
a strong impact, especially on the recovery of the lateral wind. Finally, structural and slosh
modes can induce low frequency disturbances of the measured acceleration which can
interfere with the determination of the atmospheric structure. For these reasons, we suspect
that in the near future improvements on the determination of atmospheric properties should
be obtained by tackling the system-level error sources rather than improving the
accelerometer resolution.
3.3. Accelerometer needs for Entry, Descent and Landing (EDL)
The IMUs are widely used in EDL applications for the following purposes
Inertial Navigation during the Coasting, Entry and initial Descent phases
Entry Interface Point (EIP) Detection
Parachute Deployment Trigger detection
Terrain Based Navigation
A last function, the detection of the touchdown instant, may also rely on specific
accelerometers (different from the ones in the navigation IMUs) for some mission scenarios.
Inertial Navigation
Inertial Navigation is active from the instant of separation until navigation becomes terrain-
based (with Doppler radar altimeters as for the case of ExoMars- or to stereo-
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 10
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
cameras/lidars). The fundamental purposes of the inertial navigation are 1) to propagate the
rotational state vector through integration of the gyroscope measurements and 2) propagate
the translational state vector through integration of the accelerometer measurements
(transformed in the inertial frame through the gyro-based attitude knowledge). Both
integration processes have effect on the accuracy at landing: the former process gives the
knowledge of the body frame in the inertial frame, the latter determines the knowledge of the
local vertical in the inertial frame, their combination identifies the attitude of the descent
module in the local vertical frame of the landing site. The inertial navigation error, along with
environmental effects, control inaccuracy (reaction control system) and guidance
uncertainties contribute to the total attitude error at touch-down. The inertial navigation error
allocation in this budget is in turn decomposed into a contribution from gyro and
accelerometer errors.
Lets consider first of all the gyroscope requirements determination. The following error
contributions can be considered:
the attitude knowledge error at initialization (i.e. at separation from the Carrier) in []
the residual bias from the calibration in [/hour]
the variable drift terms in [/hour]
the residual scale factor error around the spin axis in [ppm]
The ability to estimate a constant bias is limited by the variable drift. For a medium accuracy
gyroscope with a fixed bias of 1/hour, the calibration algorithm can be assumed to provide a
residual of 10%. (0.1/hour @ 1 ). The same value (0.1/hour @ 1 ) can be assigned for
the contribution of variable drift terms, An attitude knowledge error of 0.1 at separation is a
reasonable figure in the ExoMars case. The angular error after three hours of integration
reaches 0.44 @ 1. Around the spin axis the error allocation is relaxed to include also the
integration of the scale factor error (0.8 @ 1). This figure has been derived fixing a
maximum threshold of 0.57@ 1, compatible with the above described error allocation
methodology, for the errors allowed around the two axes orthogonal to the spin axis. In turn,
a specification for the maximum scale factor error residual is derived. For the case of the
ExoMars Descent Module (DM) an error of 6 ppm is determined considering a reference spin
rate of 15 /s. These requirements have been relaxed more recently after evaluation of the
relatively contained impact of IMU incremented errors in a simulated environment.
Before lander release, radar measurements are rotated in the local vertical local horizontal
frame thanks to the inertial attitude integration. A sudden variation of the incremental angle
due to the gyro noise coupled with the terrain-based sensor measurement creates a fictitious
horizontal velocity error that degrades the attitude profile generation. At lander release this
error shall be negligible w.r.t. the noise level in velocity of the terrain-based sensor. This
rationale gives a gyro noise requirement of 4 /Hz.
For the definition of accelerometer requirements we have to consider the following error
contributions:
the error for neglecting the environmental disturbances during the coasting outside the
atmosphere (gyro-integration only)
the error due to the assumption of a flat Mars surface when the navigation changes from
inertial to terrain-based
the error due to accelerometer bias
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 11
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
the inaccuracy due to the accelerometer scale factor error
the error in the knowledge of the descent module position at separation from the Carrier
the error in the knowledge of the descent module velocity at separation from the Carrier
The first and second contributions are one magnitude order lower than the allocation (0.2 @
1 ) and in practice negligible. The bias and scale factor errors have a large contribution on
the final accuracy of the local vertical knowledge. The determination of this impact has been
studied by a parametric study of the final angular displacement after integration of the
trajectory. Over the Entry phase, the accumulation of angular displacement due to a scale
factor error in the order of 300 ppm and a bias in the order of 0.3 mg yields a 0.1 error. The
allocation of the Position Error and Velocity Error in the knowledge of the DM at separation is
consistent with the overall budget and the technological limits of the state reconstruction
techniques from ground.
Planar Angle Error
-0,5
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0,5
0 50 100 150 200 250 300 350
Time [s]
E
r
r
o
r
[
d
e
g
]
err acc+
err acc-
err acc+,fpa+
err acc+,fpa-
err acc-,fpa+
err acc-,fpa-
Main Parachute
Retrorockets Firing
Figure 3-2: Evolution of the planar angle related to the accelerometer error, from EIP to landing
point. Cases of positive or negative bias and scale factor are represented by the blue and
magenta curves respectively. Error evolutions are only slightly impacted by the gyro error of
0.2 deg.
EIP detection
While the entry phase, thanks to its short duration, does not seem to impose a stringent
accelerometer calibration, the same doesnt apply to the EIP detection. Analyses show that:
Calibration of bias around X axis before separation (handled by the Carrier/Mission
Control Center) shall be guaranteed with a residual error of 10% of the nominal bias
If necessary, the descent module GNC shall be able to improve this result with a further
reduction of the residual to 23%
As far as the accelerometer noise is concerned, the most demanding algorithm is again EIP
detection. In this algorithm we must identify the instant when a specific load factor threshold
is encountered, typically 1.5 e
-3
m/s. The noise must be therefore filtered to be sufficiently
lower than this threshold. A filtering time of 5 s is consistent with an altitude range over the
Mars surface between 100 and 120 km. Finally, an Accelerometer Noise better than about
0.1 mg/Hz and a Quantization Noise better than 600 g @ 100 Hz are required.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 12
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Parachute Deployment Trigger detection
The sensitivity of two candidate algorithms has been analyzed: 1) a time-tagged propagation
derived from two time evaluations along the Entry acceleration time history (Time Tagged
criterion); 2) direct measurement of the acceleration in proximity of the opening point (g-
switch criterion). Combining those algorithms allows a reliable determination of the
parachute opening point.
Sensor errors can be split in two categories:
errors mainly influencing the mean of the Mach number, the dynamic pressure and the
altitude errors (i.e. sensor bias error and scale factor error)
errors mainly influencing the standard deviation of the Mach number, the dynamic
pressure and the altitude errors (white noise error and quantization error)
Results demonstrated that both algorithms are quite insensitive to these sensor errors.
Furthermore, the sensitivity curves show a quite flat trend for errors between 1 and 4 times
the figures specified by the other mission needs: therefore parachute deployment trigger
algorithms are not important drivers for the choice of the accelerometers in the frame of EDL
applications.
Terrain Based Navigation
Terrain Based Navigation uses the IMU to complement the measurements for terrain
approach and landing. This auxiliary contribution to the navigation is two-fold. The rotational
state estimation, fed by gyroscopes, is used to control the attitude in the landing terrain
reference frame. The accelerometer measurements are fused with the measurements of the
terrain-based sensors for the descent and horizontal translational navigation and
compensate the delays of the terrain-based sensors. This phase is not a main driver for the
selection of the IMU since this unit is not the main sensor any longer.
3.4. Accelerometer needs for rover navigation
Utilisation of the IMU in the Rover GNC
The determination of the state vector in most rover exploits largely the so-called visual
odometry, a process of stereoscopic elaboration of the images in successive steps that
permits determination of depth of specific reference features and evaluation of the motion
with respect to them. However the IMU plays an important role in the rover navigation. With
respect to other rover sensors (mainly encoders connected to the wheels, Sun sensors or
star trackers and cameras) IMU sensors have the advantage to give absolute measurements
in an inertial reference frame but the drawback of the slow drift in the estimated states due to
the presence of biases requiring periodic reset. The following main functions can be
envisaged for utilisation of the IMU in the Rover GNC:
Determination of Roll and Pitch
Fixing of Azimuth
Propagation of Azimuth
Wheel slippage evaluation
Determination of Roll and Pitch
Determination of roll and pitch angles strongly relies on the IMU information. If the rover is
still, the accelerometers measure the components of the gravity vector in the axis normal to
the chassis plane. From these measurements it is immediate to determine the roll and pitch
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 13
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
angles. If the rover is moving, the gyros can be used to integrate the initial roll and pitch
fixed angles. If the rover is operated with sequences of moving and rest periods, the IMU
platform is able to guarantee a good propagation of the roll and pitch angles even in
presence of quite large drifts. A heuristic approach can be used to combine the
accelerometer and gyroscope measurements depending on the status of the rover in order to
get the best accuracy [RD-4.]
X
Nominal
Y
Nominal
Z
Actual
Z
Nominal
e
roll
e
yaw
X
Actual
e
pitch
Y
Actual
Sun
Figure 3-3: Identification of the azimuth (yaw) error.
Fixing of Azimuth: Sun sensor and accelerometer data fusion
A Sun sensor is used to fix the heading by processing the sensor measurements with the
information of Sun ephemeredes, rover location (latitude and longitude on the planet), and
knowledge of the body vertical axis (as described in the previous paragraph). The heading
error augments with the inverse of the declination of the Sun (see Figure 3-3). For instance,
a minimum declination of 10 implies an amplification of the error of 5.7. To obtain a 0.5
heading angle error, the maximum error for each axis of the accelerometer shall be of the
order of 0.3 mg. This constraint corresponds to a sizing figure for a number of accelerometer
error sources.
Bias, bias stability and noise < 0.1 mg (each)
Misalignment < 0.03 deg
Scale Factor < 100 ppm
where the values for the systematic errors have to be understood as residuals of the in-line
calibration processes.
Propagation of Azimuth: Encoder and gyro measurements fusion
The azimuth angle evolution is related to the differential velocity of the wheels on the right
and left side of the vehicle. Exploiting this concept it is possible to build a Kalman filter fed
from the odometric and gyro measurements. Three problems must be solved:
A periodic fixing is necessary as put in evidence in the previous point
Yaw propagation is mainly affected by the gyro drift so that periodic calibration is
necessary
Actual encoders information are affected by slippage that must be purged out through
non-trivial algorithms
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 14
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Wheel slippage evaluation
An IMU-based principle for slippage detection criterion consists in comparing encoder
outputs with outputs from an accelerometer mounted in longitudinal direction. Maximum
longitudinal acceleration for a current rover is in the order of few tens of mm/s
2
. To detect
perturbations in the longitudinal acceleration or braking phases due to slippage a resolution
of few mm/s
2
is needed. This is in general a very stringent requirement for the light and small
accelerometers used in the rover applications. Other strategies based on inclinometers,
steering potentiometers and rocker-boogie potentiometers for the slippage detection are
generally preferable.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 15
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
4. Synthesis of requirements and identified products
4.1. Summary of requirements and drivers
Table 4-2 summarizes the main drivers and requirements for space applications of
accelerometers.
4.2. Accelerometer classes
The mission requirements have been gathered to define three accelerometer classes:
A specific accelerometer for launcher applications. This accelerometer will be tailored to
measure high accelerations with a very different environment than space missions (high
vibration, low radiation, short lifetime), and specific constraints in terms of cost and
availability. For these reasons, it is considered that the launcher-oriented accelerometer
would not be similar to the accelerometer for space missions.
A high-resolution accelerometer for micro-propulsion applications (electric and cold gas
propulsion). A sub-g resolution is required, which cannot be met with current MEMS
technology. An accelerometer based on electrostatic suspension could be used for this
application, see [RD-2.]
Finally, a generic accelerometer covering most space applications. The corresponding
requirements are detailed in the next section.
The potential market for each accelerometer has been studied, based on planned ESA
missions in the next decade. The reduced number of units would justify a relatively high
recurrent price.
Application Coarse Medium High Science grade
Geostationary 200 D (main engine) C (SKM)
Lagrange points 3 C (SKM)
Interplanetary mission 4 A (FDIR) B (TCM) C (TCM)
w/ Aerobraking 1 A
Fine Orbit Control / RdV 3 C (chemical) D (-prop.)
Launcher 150 A
Passive Landing 5 A (parachute)
Controlled Landing 1 A
Rover 1 A (local vertical) B (wheel slippage)
Drag-Free 3 A
Formation flying 3 C (deployment) D (position control)
Electric Propulsion 1 D
Number of
missions
A mandatory (only possible solution)
B useful (probably the best solution)
C possible (balanced trade-off)
D unlikely (probably not the best solution)
no use
Table 4-1: Synthesis of the foreseen accelerometer and IMU needs
for the 2015-2025 time frame.
Accelerometer precision ranges from coarse (0.1 mg) to Science grade (better than 10
-9
g).
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 16
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Missions Applications Range Precision Drivers
Launcher GTO 100 m/s 1 mm/s
Cost, availability
Very good linearity (< 100 g/g)
Lifetime/radiation less important
Main engine FDIR 500 mm/s 8 mm/s Robustness/reliability
V 0.1-10 m/s 30 mm/s 0.1 mm/s Low noise (read out < 0.09 mm/s)
Fine orbit control
(1 mm/s)
30 mm/s 0.1 mm/s
Very low noise ( white < 10 g/ Hz,
read out < 0.01 mm/s)
Propulsive
maneuvers
GEO Station
keeping
(10 mm/s)
10 mm/s 0.1 mm/s
Low noise (read out < 0.09 mm/s)
Bias stability (< 3 g/hr)
Cost, availability
Navigation 6 mm/s 0.5 mm/s
Low noise
inertial navigation algorithm
Aerobraking Atmosphere
reconstruction
(science)
6 mm/s 50 m/s
Very low noise (read out < 0.05
mm/s)
Navigation algorithm design
Fusion with thermal sensors
Inertial navigation 100 m/s 0.5 mm/s
Bias stability (thermal drift < 20
g/C)
Robustness
Mass/power
Gyro quality (< 1/h) and navigation
algorithm key drivers
Entry detection 1 mm/s 0.5 mm/s
Bias stability (thermal drift)
Mass/power
Parachute
deployment
10 m/s 7 mm/s
Bias stability (thermal drift < 15
g/C)
Scale factor stability (< 300 ppm)
EDL
Airbag venting 400 m/s 1 mm/s
Low cost/mass
Robustness
High bandwidth (> 500 Hz)
Navigation/roll pitch 4 m/s 4 mm/s
Low power/mass
Bias stability (< 100 g/hr)
Navigation/azimuth 4 m/s 3 mm/s Low power/mass Rover
Wheel slippage
detection
10 mm/s 0.5 mm/s
Low noise
Alignment stability (<150 rad)
Formation
Flying
Fine position control 1 mm/s 1 m/s
Very fine resolution
Bandwidth > 0.5 Hz
Low mass/power
GEO station
keeping
5 mm/s 0.5 m/s
Very fine resolution
Low mass/power
Cost, availability Electric
propulsion
Interplanetary
cruise
5 mm/s 1 m/s
Very fine resolution
High bias stability (> 2 hours)
Table 4-2: Main drivers for accelerometer applications
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 17
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
4.3. Accelerometer performance requirements
The specified performance requirements are summarized in Table 4-3 below and detailed in
this section.
Parameter Value Unit Comment Driver
range 20 g i.e. 20 m/s at 10 Hz EDL
acquisition rate 10 Hz settable ; goal: up to 100 Hz 100 Hz for EDL
bias 300 mg will be calibrated
bias stability 1 hour 45 g with 3C temp change TCM 1 m/s
bias stability 90 s 3 g with 3C/hr temp change calibration, TCM 1 m/s
bias stability 200 s 1 mg with 60C temp change Entry
white noise 20 g/ Hz TCM 1 m/s, entry detection
Scale Factor 500 ppm parachute opening
Alignment 300 rad
Non-linearity 400 g/g i.e. 0.8% full range SF error EDL
read out noise 0.06 mm/s i.e. LSB < 12 * 0.1 = 0.21 mm/s TCM 1 m/s, Aerobraking
Table 4-3: Characteristics of Accelerometer / IMU for generic space applications.
Measurement range and resolution
In terms of measurement range and resolution, the EDL application appears as a specific
case, requiring a measurement range of 20 Earth gs, and relatively coarse resolution. Most
other space applications would be covered with 1 g range sensor and a resolution of 0.6
mm/s.
The technology survey (see chapter 5. ) indicated that the sensor intrinsic errors of a 20 g
sensor could be compatible with the precision requirements for the 1 g applications. This is
especially clear for the VBA technology whose performances are relatively independent of
the measurement range.
Nevertheless, the resolution of the accelerometer could be limited by the quantization error.
A 20 g range leads to a LSB of 610 g (6 mm/s) for 16 bits quantization. The resulting
quantization error is equivalent to 0.2 mm/s at 10 Hz, which is too high to monitor small
thruster pulses or perform navigation during aerobraking. A reduction of the scale factor gain
(by a factor of 4 or more) would bring the LSB to the expected value. It is therefore thought
that the same sensor can meet all the requirements thanks to a limited modification of the
readout electronics. Alternatively the use of a higher bit depth, if possible, would solve the
problem. Also note that the full range (20 g) is required for EDL applications at 100 Hz,
while the 0.6 mm/s requirement for other applications holds at 10 Hz.
Bandwidth
Most AOCS applications run at a relatively low frequency (8-10 Hz). However simulations
showed that for EDL, some improvement could be gained by performing navigation at a
higher rate (50 to 100 Hz, see chapter 6. ) This is especially true for the gyro measurements,
but the same output rate should be used for gyro and accelerometer measurements.
On the other hand measurements of a constant low thrust could benefit from a lower rate to
limit the impact of the readout noise. As a goal, a settable measurement frequency in the
range [2 100] Hz (bandwidth 150 Hz) is therefore specified.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 18
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Noise
White noise and quantization error dominates the budget for the measurement of small
thruster pulses (typically 0.1 m/s). A value of 20 g/Hz is specified (63 g rms at 10 Hz).
Bias and bias stability
A first important remark is that the absolute value of the bias is never an issue for space
applications because bias calibration is almost always possible before the measurement
begins. This is a major difference with Earth applications were calibration is more delicate or
impossible. An exception is of course rover navigation applications which involve a more
intricate calibration procedure using sensor fusion, see section 3.4.
On the other hand a particular care should be devoted to the bias stability when designing
the sensor. As mentioned earlier, the bias in itself does not have a direct impact because of
the relatively short integration times of space applications (a few minutes at most). The
indirect effect of limiting the reachable calibration residual on the other hand is critical. Based
on typical accelerometer characteristics, we have estimated that the optimal calibration time
to reach a given calibration residual. This requirement is naturally expressed as a maximum
Allan deviation of 30 m/s over a 90 s horizon. This requirement shall hold against typical
temperature variations of t3 C/hr.
Scale factor and alignment stability
A scale factor error of 500 ppm and an alignment stability of 500 rad (at unit level) are
specified. The full range scale factor error may affect the navigation for EDL applications
around the peak deceleration point. A maximum error of 0.8% can be tolerated.
Interface
In term of interfaces, a RS422 bus is considered as a primary target for an IMU. Mass is
indeed a strong driver for missions considered here (mostly interplanetary missions), while
the exchange data rate will remain low.
Mass and power
For a stand-alone accelerometer axis, the mass of the sensor is expected to be lower than
50 g and the power input limited to 0.5 W.
Environment requirements
The environment is specified Table 4-4 below. Shock survival could be an issue for some
detector design. The operating temperature range requirement would probably necessitate a
temperature calibration process.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 19
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Parameter Value Unit Comment Driver
mass 50 g
power 0.5 W
diameter 25 mm
Min Op Temp -20 C Rover, Landing
Max Op Temp 65 C Landing
Min Non-Op Temp -30 C
Max Non-Op Temp 65 C
pressure 0-1100 mbar
Sinusoidal vibration 10 mm 520 Hz Launch
20 g 20100 Hz
Random vibration 3 db/octave 20100 Hz
1 g/Hz 1002000 Hz
Shock 1000 g 1500 Hz half-sine Pyro
Radiation 100 Krad total dose full performance interplanetary missions
Table 4-4: Desired system and environment characteristics for the accelerometer
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 20
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
5. Survey of accelerometer technologies, performances
and trends
A survey of existing accelerometer technologies has been performed and the best
candidates for space applications have been identified. The main findings are summarized in
Table 5-1 and detailed hereafter.
The best performance is obtained with Vibrating Beam Accelerometers made in Quartz. They
are considered as high end MEMS components to be used in navigation systems for civil and
military avionics and for ammunitions guidance (missiles for instance). Only a few providers
are making these units (among others Safran and Thales Avionics in France, former LITEF in
Germany) and they are usually vertically integrated. As they are quite costly and are parts of
strategic systems, the devices are usually sold in Inertial Measurement Units and/or full
Inertial Navigation Systems, not as stand-alone components for custom integration. These
devices are commonly known as the best choice for long term stability of the performances
(bias drift, scale factor drift), low thermal dependency (due to the material itself but also due
to the decades of efforts spent to optimize their assembly lines and materials). Technically-
wise, they are obviously the less risky solution for the 0.1mg range required by the space
applications. Built out of Quartz, they benefit from the piezoelectric effect which simplifies the
electronics read-out circuitry (shift of resonant frequency with acceleration load).
Manufactured in low volumes, they are quite expensive to manufacture and do not exist in
single chip three axis versions (technology limitations). Some improvements are in the
research phase using Deep Reactive Ion Etching for Quartz. One can expect that either
performance will improve or that the number of players in the field will increase and drive the
costs lower.
Two other alternative approaches to Vibrating Beam Accelerometers made of Quartz can be
foreseen as potentially suitable to reach the medium quality requirements for Space
applications:
Vibrating Beam Accelerometers (VBA) based on single crystal Silicon
Variable capacitance accelerometers based on either Bulk Micromachining or Silicon on
Insulator (SOI) technologies.
VBAs on Silicon are based on the same principle than VBAs in Quartz but use a capacitive
detection scheme rather than the piezoelectric effect of Quartz. Implementing VBAs in Silicon
would require expertise in the electronics field similar than for state-of-the-art MEMS gyros.
The drive and detection schemes are very similar and European expertise in the field of
MEMS gyros could be leveraged to develop this technology.
State-of-the-art variable capacitance accelerometers (based on bulk or SOI) are today mainly
used for cost driven high volume market places (low performance). Most European
companies using that technology are addressing the consumer and automotive markets (e.g.
ST Microlectronics, VTI Hamlin, German companies) and very few companies in Europe are
committed to the navigation market place (mainly Colibrys, MEMSCAP). Current
performance is today in the mg range. There are no obvious limitations from the technology
point of view (Single crystal Silicon) and probably gaining an order of magnitude is possible
with careful design of the accelerometer component (MEMS + ASIC + Packaging) at the cost
of a higher technical risk than for a Quartz VBA but with probably decent costs reductions.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 21
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Nevertheless, for a given IC architecture for capacitive detection, it is possible to evaluate
bias drifts only arising from the IC. This should give us a first limiting factor for this type of
devices. For instance, lets consider two options:
Open loop with sigma-delta signal conversion
Closed loop with sigma-delta signal conversion.
Both systems require a Voltage reference (V
ref
) as stable as possible.
In the case of an open loop architecture, the signal is proportional to Delta Capacitance times
V
ref
. It is possible to get rid of any fluctuation of V
ref
by carefully choosing the output signal
formulation. The drift would then mainly come from the charge migrations in the circuitry, and
hence an excellent bias stability is expected. In the case of a closed loop system, the output
signal is proportional to V
ref
squared. The best commonly available voltage sources today
have variations of 5 ppm/C. Since the output signal is proportional to the square of V
ref
, this
would lead to 10 ppm/C variations for the bias values.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 22
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
QuartzVBA Silicon VBA Capacitive SOI Capacitive
Bulk
Material
Quartz Single crystal
Silicon
Single crystal
SOI
Single crystal
Silicon
Sensor die
design
complexity
- -
Resonant , cross
talk due to
asymmetries
- -
Resonant device
+
Cross-talk
+
Cross-talk
Sensor die
volume
=
Typically 55 mm
= = =
Manufacturing
complexity
-
Typically wet etch
control is critical
(time etch)
-
Side walls etch
control critical
+
Aspect ratio and
trench quality are
critical
+
Typically 3 wafer
stack, wafer to
wafer alignment is
critical
Packaging
volume
=
Typically ceramics
= =
Typically ceramics
=
Typically ceramics
or TO cans
IC volume
+ -
-
max 15mm
2
-
max 15mm
2
IC Complexity
- - -
Resonant type of
device, feedback
loop needed
- - -
Resonant type of
device, feedback
loop needed
-
Delta-Sigma with pF
values
-
Delta-Sigma with pF
values
Thermal
sensitivity
-
Unknown
+
+
Stack of wafers
Shock
resistance
-
Quartz
+
Buckling
acceleration
++
Single wafer but
overloads difficult
+
Stack of wafers but
overloads available
Noise
+
Operates under
vacuum, noise
mainly from
electronics
=
=
Small mass,
Requires reduced
pressure in the
MEMS die cavity
=
Large mass
Bias stability
= =
Voltage reference in
closed loop
configuration
=
Charging effect,
voltage reference in
closed loop
configuration
=
Charging effect,
voltage reference in
closed loop
configuration
Scale Factor
Stability
++ =
Mainly IC design
dependent
-
IC design
-
IC design
Yield - - - - + -
Costs - = + +
Table 5-1: Comparison table between MEMS technologies for accelerometers
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 23
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
6. Simulation of IMU performances for a landing mission
6.1. Description of the simulation tool
The performance of the IMU and associated inertial navigation algorithms was investigated
by simulation. The high-fidelity Safe-to-Mars software was used to generate 6-degree-of-
freedom trajectories representative of a Martian landing mission. This software uses the
EMCD atmosphere model, a reference aerodynamic database, a J
2
gravity model and a
specific model of parachute opening. The trajectories are sampled at 1 kHz. They are used
to feed the Real-World angular and linear accelerations to the sensor models and as
reference to compute the navigation error. A fixed offset between the IMU and the lander
center-of-mass can be specified. Finally, the Real-World model includes a user-provided
temperature profile during the EDL timeline.
The gyro model used for these simulations is a high-fidelity model of the SiREUS. This model
includes a noise shaping filter to reproduce the sensor power spectrum density (PSD) and an
ad-hoc statistical model of the temperature sensitivity of the bias. A constant scale factor
error and quantization effects are also taken into account. The accelerometer model on the
other hand is a generic mathematical model including white noise, scale factor and non-
linearity errors, quantization errors. The accelerometer bias is assumed to be calibrated at
entry. Bias drift is taken into account as a random linear function of both time and
temperature.
6.2. Attitude update
The inertial navigation algorithm relies on first an integration of the measured angular rate in
order to determine the attitude quaternion, thanks to the following equation
,
0
2
1
q q
,
`
.
|
& , (1)
where (0, ) denotes the angular rate seen as a pure quaternion and is the quaternion
product. High-rate gyro measurements are integrated over the AOCS period to get a rotation
vector :
.
1
+
n
n
t
t
i
t (2)
Let denotes the norm of the 3-dimensional vector . Then the quaternion is updated with
the integration scheme
( )
( )
n n
q q
,
`
.
|
2 sin
2 cos
1
. (3)
This scheme is exact whenever the direction of the angular rate vector remains constant
during the integration time. If this is not the case, an integration error is introduced: the so-
called coning error, see [RD-6.] In practice, the impact of this error depends on the high
frequency vibration environment of the sensor. This environment is not faithfully reproduced
by our simulator so the importance of coning cannot be directly investigated. Nevertheless,
one can get an idea of this impact by looking at the integration error introduced on the 1 kHz-
sampled trajectories. In fact, even a 1 kHz integration of equation (3) yields a small error
(typically 0.01) with respect to the higher-order reference simulation. This error increases
with the AOCS integration period. With a 10 Hz integration rate more representative of flight
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 24
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
GNC software, the error reaches 0.06. This error can be reduced by using a coning
compensation algorithm
4
. For instance, one can replace equation (2) by equation
.
2
1
1
,
`
.
|
+
n
n
t
t
i i i
t (4)
It can indeed be shown that equation (4) is equivalent to equation (1) up to second order in
time. But equation (4) is much simpler than (1) and can therefore be integrated at high rate.
In practice, integration of equation (4) at 1 kHz combined with quaternion update (3) at 10 Hz
is equivalent to quaternion integration at 1 kHz with a much reduced computational
throughput.
Although the coning compensation algorithm was shown to efficiently reduce the integration
error, it was not deemed useful for current EDL applications. Indeed the error introduced by
the sensor is two orders of magnitude larger than the integration error, making the latter in
practice negligible. Therefore the coning compensation algorithm has not been considered in
the rest of the study. Similarly, integration errors arise for velocity and position update,
referred to as sculling and scrolling errors, see [RD-7.] These errors are even more negligible
with respect to IMU errors for current EDL applications. Sculling and scrolling compensation
algorithms have therefore not been considered.
6.3. Velocity and position update
The velocity is updated by integrating accelerometer measurements and the adding
gravitational acceleration term. The attitude quaternion is used to perform the update in the
reference inertial frame. A second order algorithm uses the half-sum of the attitudes at time
time t
n
and t
n+1
:
.
~ ~
2
1
1 1
1 1
,
`
.
|
]
]
]
]
+
]
]
]
]
+ +
+ +
n
t
t
n n
t
t
n
q dt q q dt q
n
n
n
n
a a A (5)
The velocity update reads:
( ) .
1
1
+
+ + +
+
n
n
t
t
n
grav
n n
dt t d x F A v v
The gravitational acceleration F
grav
is computed at time t
n
. The last term is the compensation
of the lever-arm d between the sensor and the body center-of-mass.
Finally, the position is updated thanks to second-order half-sum velocity integration:
( ) .
2
1
1 1
t
n n n n
+ +
+ + v v x x
6.4. Coast phase
The IMU-based inertial navigation starts after separation from the carrier module. During the
coast phase outside the planetary atmosphere, attitude is updated from gyro measurements
while non-gravitational acceleration is essentially zero. The length of the coast phase can be
longer than the EDL phase itself, as is the case for the Exomars mission. The coast phase
will therefore account for a significant part of the inertial navigation error, especially as far as
attitude is concerned. Because of the relatively large spin rate, the gyro scale factor error can
have catastrophic consequences on the attitude around the spin axis. A scale factor error of
0.4% results in 11of error after 30 minutes of coast. Note that the inertial direction of this
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 25
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
axis during cruise is almost normal to the local vertical at the landing point, so the coast
phase attitude error directly impacts the knowledge of the local vertical at touch-down. On
the other hand, the spinning motion reduces the impact of biases around transverse axes. A
typical error of 1around transverse axes arises from the misalignment error, but this error
does not grow with time, A calibration of these terms is not required.
To asses the impact of the coast phase, we have simulated a 2 hour phase with a constant
spin rate of 15/s. The scale factor is calibrated during the first 20 minutes of the simulation.
The results are displayed on Figure 6-1 show that the error remains below 2after one hour.
Figure 6-1: MEMS rate sensor integration error during coast phase.
Left and right: two different random seeds.
6.5. EDL
The coast phase final attitude error is used to initialize the EDL simulation. The attitude error
increases during the entry because of the nutation induced by aerodynamic forces. At the
end of the entry phase the parachute is opened. A verticalization of the trajectory occurs and
the error along the spin axis is transferred to transverse axes. Results shown in Figure 6-2
show a resulting attitude error of approximately 5. This figure is deemed compatible with the
touch-down requirements. The velocity and position error are displayed in Figure 6-3. As
expected, neither the lateral velocity nor altitude can be predicted accurately enough to initial
and control the powered descent phase. Additional sensors are required such as a radar
altimeter, a Doppler velocimeter, or a vision-based system. Finally, we show in Figure 6-4 the
evolution of the error on the knowledge of the local vertical. The figure also shows the
relatively small contribution of the position error to this value. These preliminary results seem
to indicate that an Inertial Measurement Unit based on the SiREUS MEMS rate sensor could
be compatible with a landing mission with a 5requirement on the local vertical at touch-
down.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 26
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Figure 6-2: SiREUS MEMS rate sensor integration error during EDL.
Left and right: two different random seeds.
Figure 6-3: Position error during EDL: SiREUS MEMS rate sensor combined with model of
future European accelerometer. Left and right: two different random cases.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 27
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Figure 6-4: Evolution of the error on local vertical during EDL: SiREUS MEMS rate sensor
combined with model of future European accelerometer.
Left and right: two different random cases.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 28
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
7. Preliminary design of an IMU for space applications
7.1. MEMS IMU architecture
The reference rate sensor for this activity was selected to be the European MEMS rate
sensor SiREUS [RD-5.] The reference accelerometer was the capacitive MEMS technology
which, as discussed above, has been assessed to provide a suitable level of performance
compared to the Technical Requirements presented in chapter 3.
Experience from the MEMS rate sensor development highlights a number of key factors in
achieving the best possible performance from this technology, which can be brought to bear
in the foreseen accelerometer development. In particular it is evident that MEMS technology
there is a very strong interaction between the detector, the proximity electronics and the
related control loops that must be optimized to achieve a good level of performance. This is
balanced by the ever-present constraints of availability of space components, in particular
following the SiREUS approach of using ITAR-free parts.
The following design drivers were therefore considered in the derivation of the design:
Meeting key performance parameters discussed above.
Matching accelerometer proximity electronics as close a possible to the host (SiREUS)
architecture and component selection; minimizing component cost and integration cost.
Mechanical integration of the accelerometer detectors and support electronics with a
minimal impact on the unit mass/power/volume characteristic.
Integration of accelerometers within requirements for misalignment (absolute and
stability).
An outline of the IMU Electrical Architecture is shown in Figure 7-1. The majority of the
accelerometer functionality is provided by an extension of the host unit; in this case SiREUS.
This provides:
Telecommand and Telemetry Support
Secondary Power
The detector baseline is a pendulum style capacitive MEMS accelerometer as discussed
above and accelerometer detectors are accommodated on a single printed circuit board
(PCB) with their associated proximity electronics. In order to not introduce new component
types which can increase unit costs (MOQs, parts qualification costs, etc) an initial proximity
electronics design has been derived using the same component types present in the SiREUS
parts list. This approach includes the same electrical architecture as the SiREUS unit using
lower cost sample & hold circuits to minimize the use of more expensive Digital-to-Analogue
Converters (DACs). An assessment of this approach confirms operation is feasible up to 100
kHz for detector drive and sense circuits.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 29
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Figure 7-1: Outline of the IMU electrical architecture.
Figure 7-2: Outline of the IMU mechanical architecture
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 30
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
The remainder of the accelerometer functionality is integrated into the existing SiREUS
FPGA design. Here VHDL IP CORES already developed are used to interface to the
proximity electronics ADCs and DACs. Similarly a sub-set of the rate sensor processing IP
COREs can be used to perform the key accelerometer functions of synchronous
demodulation, filtering and frequency decimation to provide the accelerometer outputs in the
required bandwidths. An initial sizing indicates that the required accelerometer functions can
be readily accommodated in the FPGA within the current spare 50% of the capacity of the
Actel RTAX2000 device. As for the current SiREUS development it is understood that the
FGPA design would requires migration to a European ASIC as a final step to support a fully
ITAR free status.
For the mechanical integration consideration again maximum experience has been derived
from the SiREUS development in the accommodation and management of a similar class of
detector. The preliminary approach is outlined in Figure 7-2.
7.2. Stand alone accelerometer architecture
A proposed tri-axis accelerometer architecture is described in Figure 7-3. A single axis
configuration could also be envisaged. The support electronics could also be hosted in a
separate processing unit.
Figure 7-3: Tri-axis stand-alone accelerometer architecture.
7.3. Budgets
From this preliminary design activity a comparison table of the impact of integrating the
accelerometer functions is indicated in Table 7-1.
For the Stand-Alone accelerometer, the estimation depends on the choice between a
discrete electronics FPGA and a mixed signal ASIC. Predicted values are indicated in Table
7-2, based on a tri-axis accelerometer design.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 31
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Parameter
Predicted
IMU Value
Actual
SiREUS
Value
Requirement Estimate
Power
< 5.5 W @
28Vdc
< 5.2 W @
28Vdc
< 0.5W / axis
Accelerometer PCB +
FPGA delta
approx 300 mW = 100
mW/axis
Mass < 750 g 750 g < 50 g / axis
Accelerometer PCB
(ignores FPGA)
approx 60 g = 20 g/axis
Volume
100*100*90
mm
110*110*70
mm
< 25 mm /axis
Accelerometer PCB
(ignores FPGA)
Approx 70 * 70 mm = 40 *
40 mm /axis
Table 7-1: Budget Comparison for Accelerometer Integration
Parameter
Predicted Stand Alone
Value
Estimate
Power
Mass
<1.6 W @ +/- 5Vdc
< 158 g
Accelerometer PCB = 100
mW/60g
CSI PCB = 1500 mW/48g
Mechanical and misc = 50 g
Volume 90*90*35 mm Two PCB module
Power
Mass
<0.9 W @ +/- 5Vdc
60 g
Accelerometer & ASIC
PCB = 100 mW/60g
Volume 90*90*35 mm One PCB module
Table 7-2: Predicted Stand Alone Accelerometer Budgets. Top rows: discrete electronics
FPGA, Bottom rows: Mixed Signal ASIC.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 32
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
8. Preliminary development plan
8.1. Products and schedule
A development plan for a future space accelerometer is proposed, addressing both
integration inside the MEMS rate sensor to create an IMU and the development of a stand
alone version. Three product lines are identified:
The accelerometer detector
The stand-alone accelerometer (SAA) with supporting electronics and packaging
The MEMS IMU
A three-phase development plan is proposed (see Figure 8-1):
Phase 1 (6 months) for the development of the concept. A key point during this phase is
to select the most promising detector, taking into account the constraints at IMU and
stand alone design level. A certain level of risk (in terms of schedule) is associated to this
activity, related to the consistency of the detector characteristics with performance
requirements and environment constraints. This phase ends at Preliminary Design
Review (PDR) of all three products.
Phase 2 (6 months) for the development of the Engineering Model (EM). This phase ends
with the Critical Design Review of the SAA and IMU, and the Technical Review Board
(TRB) at accelerometer detector level, analyzing the results of the detector
characterization campaign.
Phase 3 (6 months) for the development of the Proto-Flight Model (PFM), and the
evaluation of the manufactured detector.
8.2. Accelerometer development activities
As far the detector is concerned, a first key point concerns the early concept demonstration.
This demonstration relies on performance characterization by trials on critical requirements if
necessary, but also on assessment of the choice of materials and processes, in particular
with respect to the foreseen radiation environment. This point shall be studied at a theoretical
level at this stage. Packaging issues for the Flight Model shall be addressed.
The detector characterization activities will include further performance assessment,
structural and radiation testing if required.
Finally a batch evaluation plan could follow the outline established for the development of the
MEMS rate sensor.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 33
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
Figure 8-1: Proposed development plan.
8.3. IMU development activities
In the first phase, the proximity electronics for the accelerometer support and the VHDL
functions to be implemented on the FPGA will be designed.
After PDR, the accelerometer support PCB will be designed and developed. This phase will
also address the thermal and structural design modifications required on the IMU to integrate
the accelerometer PCB. The IMU EM would allow a (limited) environmental testing and
perhaps an early in-flight test.
The PFM will then be designed and qualified. The unit would be available for third party
testing and/or an experimental flight opportunity. Note that the most likely opportunity would
be to monitor spacecraft propulsion on a LEO or GEO spacecraft.
8.4. Stand Alone Accelerometer development activities
The design of the SAA product would rely on the outcome of other activities:
Selected detector
Proximity electronics PCB developed for the IMU
FPGA control electronics derived from the IMU design
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 34
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
The Engineering Model could as previously be used for limited environmental or third party
testing. The design of the SAA Flight Model should decide between discrete electronics or
ASIC for support functions.
Accelerometer needs for IMU
Doc.
Date: 25/03/2009
Page 35
All rights reserved THALES ALENIA SPACE All rights reserved
M032-6
9. Conclusion
The present study has analyzed the needs for an accelerometer specifically designed for
space applications. A range of 1g and a resolution of the order of 50 g is required to cover
most applications except landing missions, which need a wider range of 20g and a resolution
of 1 mg. It is thought that a single sensor possibly with different tuning could match all these
requirements. Bias stability over a 90 s horizon is a critical point to ensure an accurate
calibration when required.
A technological survey identified the quartz Vibrating Beam technology as still the best option
to meet these requirements. Silicon Vibrating Beam is an emerging technology which retains
some of the benefits of the former while reducing the cost and manufacturing complexity.
Finally Silicon capacitive pendulum accelerometers are ubiquitous in the mass market and
recent developments are pushing there capabilities toward the high-end market.
A possible Inertial Measurement Unit based on the European SiREUS MEMS rate sensor
has been designed in a preliminary way and its expected performance for and EDL mission
has been validated through high-fidelity simulation.
This work opens the way to future developments of a MEMS-based light-weight European
Inertial Measurement Unit, integrating either existing accelerometers matching the derived
requirements, or a new sensor developed specifically for space applications.
END OF DOCUMENT
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- ESKOM Overhead Power Lines-The Planning Design & ConstructionDocument789 pagesESKOM Overhead Power Lines-The Planning Design & Constructionhajduk1286% (36)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Science Lab Equipment Study SheetDocument2 pagesScience Lab Equipment Study Sheetapi-314843596100% (1)
- DLL - SCIENCE 4 - Q3 - WEEK 2 Explain The Effects of Force@edumaymay@lauramosDocument7 pagesDLL - SCIENCE 4 - Q3 - WEEK 2 Explain The Effects of Force@edumaymay@lauramosjeraldine endenoNo ratings yet
- 30 Years Down The Road: Warfighter RoundtableDocument52 pages30 Years Down The Road: Warfighter RoundtableThinkDefence100% (1)
- Ch01 - SE 1.4Document12 pagesCh01 - SE 1.4GeorgeNo ratings yet
- Mathematicians Research ProjectDocument3 pagesMathematicians Research Projectapi-366304862No ratings yet
- Analysis of The SOR Iteration For The 9-Point LaplacianDocument26 pagesAnalysis of The SOR Iteration For The 9-Point LaplacianJefferson SantanaNo ratings yet
- Inertial Navigation Equations: PreliminariesDocument10 pagesInertial Navigation Equations: PreliminarieshuyhanghaiNo ratings yet
- Chap 09 Solutions Ex 9 2 Method Umer AsgharDocument8 pagesChap 09 Solutions Ex 9 2 Method Umer AsgharArmughan Ahmad100% (2)
- OphiuchusDocument7 pagesOphiuchusZoth BernsteinNo ratings yet
- Radar & NavigationDocument26 pagesRadar & NavigationridwanwidyantaraNo ratings yet
- A3 FEA of A Simple Cantilever BeamDocument6 pagesA3 FEA of A Simple Cantilever BeamDavid LamNo ratings yet
- Beam Design Notes Nzs 3404Document24 pagesBeam Design Notes Nzs 3404sdewss100% (3)
- Algebra Problem On Applying The Cauchy Schwarz Inequality - Find Tuong's Minimum - Calvin Lin - Brilliant PDFDocument5 pagesAlgebra Problem On Applying The Cauchy Schwarz Inequality - Find Tuong's Minimum - Calvin Lin - Brilliant PDFKrutarth PatelNo ratings yet
- Performance Evaluation of Induction Motor Efficiency and PDFDocument5 pagesPerformance Evaluation of Induction Motor Efficiency and PDFFabian Martinez FuentesNo ratings yet
- Soils and Rocks Schedules and Chain of Custody SheetsDocument3 pagesSoils and Rocks Schedules and Chain of Custody SheetsJajat Sudrajat100% (1)
- Rugby PhysicsDocument2 pagesRugby PhysicsToufic HageNo ratings yet
- Pyramids Built by Ancient To Stabilize Telluric Energies Around The Earth 49 Minutes To 53 MinutesDocument3 pagesPyramids Built by Ancient To Stabilize Telluric Energies Around The Earth 49 Minutes To 53 Minutestavdeash238No ratings yet
- Praktikum 3Document16 pagesPraktikum 3Samuel Manalu100% (1)
- Dependent SourcesDocument11 pagesDependent SourcesSaif Ullah KamranNo ratings yet
- Consistent: Continuing To Raise The Bar OnDocument16 pagesConsistent: Continuing To Raise The Bar OnrodrigoNo ratings yet
- Ideal Gas SolutionsDocument3 pagesIdeal Gas SolutionsCruz SaliseNo ratings yet
- Introduction To Mass Transfer and DiffusionDocument10 pagesIntroduction To Mass Transfer and DiffusionKema TechnowakaNo ratings yet
- Course Outline MMSC Monte Carlo MethodsDocument4 pagesCourse Outline MMSC Monte Carlo MethodsLatosha TrevinoNo ratings yet
- Shin PublishedSept2017 PDFDocument10 pagesShin PublishedSept2017 PDFtrader123No ratings yet
- EdUnit 5 Answers (1995-2006) Excel PhysicsDocument141 pagesEdUnit 5 Answers (1995-2006) Excel PhysicsAravinth Pushparaj100% (2)
- SolenoidDocument24 pagesSolenoidEbayLunaNo ratings yet
- Torsión Timothy26-41Document37 pagesTorsión Timothy26-41Marlon ProañoNo ratings yet
- Finite Element MethodDocument15 pagesFinite Element MethodLeo Lonardelli0% (1)
- MCNPDocument38 pagesMCNPAdi KurniawanNo ratings yet