You might also like
- Solutions To Skill Assessment ProblemsDocument53 pagesSolutions To Skill Assessment ProblemsMuhammad ArslanNo ratings yet
- Control System Laboratory ReportDocument55 pagesControl System Laboratory Reportavishekkgec50% (2)
- 6 RC Phase ShiftDocument6 pages6 RC Phase ShiftengineerluvNo ratings yet
- Designing a Digital Clock CircuitDocument20 pagesDesigning a Digital Clock CircuitMenzeli Mtunzi40% (5)
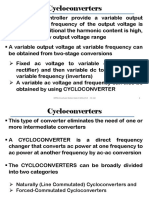
- Lecture 03 - CycloconvertersDocument29 pagesLecture 03 - CycloconvertersdaudiNo ratings yet
- Experiment 2 BJT SwitchDocument6 pagesExperiment 2 BJT Switchprop_kcp50% (2)
- Digital To Analog Converter Using R 2R Ladder Network and 741 Op AmpDocument3 pagesDigital To Analog Converter Using R 2R Ladder Network and 741 Op AmpPuneeth Siddappa100% (1)
- ELECTRICAL CIRCUIT ANALYSIS - II EXAM QUESTIONSDocument8 pagesELECTRICAL CIRCUIT ANALYSIS - II EXAM QUESTIONSsrinu247No ratings yet
- Power Electronics Controlled RectificationDocument13 pagesPower Electronics Controlled Rectificationkibrom atsbhaNo ratings yet
- Power Electronics Typical Solved ProblemsDocument10 pagesPower Electronics Typical Solved Problemsaprilswapnil0% (1)
- A Single Phase Transformer Has 350 Primary and 1050 Secondary Turns. The Net Cross-SectionalDocument12 pagesA Single Phase Transformer Has 350 Primary and 1050 Secondary Turns. The Net Cross-SectionalKasim WondosenNo ratings yet
- Digital Electronics Lab Viva QuestionsDocument2 pagesDigital Electronics Lab Viva Questionspramodrp200750% (8)
- Stability Analysis Using Routh-Hurwitz CriterionDocument34 pagesStability Analysis Using Routh-Hurwitz CriterionNina ButtNo ratings yet
- Eca Lab-Min PDFDocument87 pagesEca Lab-Min PDFAkashita SharmaNo ratings yet
- Matlap Qus NewDocument4 pagesMatlap Qus NewMathanbabbNo ratings yet
- Chapter 01-Control Systems Engineering-Norman S Nise 4th Edition-Solution Manual PDFDocument11 pagesChapter 01-Control Systems Engineering-Norman S Nise 4th Edition-Solution Manual PDFRaufzha AnandaNo ratings yet
- MSE 481 - Quiz I SolvedDocument2 pagesMSE 481 - Quiz I SolveddopyfuckNo ratings yet
- Jury Stability TestDocument7 pagesJury Stability TestSunil GiriNo ratings yet
- EC2255-Solved Problems in Control Systems PDFDocument182 pagesEC2255-Solved Problems in Control Systems PDFmaheshbabu527100% (2)
- System Theory Model Question Paper 0001Document7 pagesSystem Theory Model Question Paper 0001Karthick Nivas100% (1)
- Poles and Zeros of Network FunctionsDocument4 pagesPoles and Zeros of Network FunctionsDina Garan100% (4)
- Feedback and Control Systems Lab ManualDocument72 pagesFeedback and Control Systems Lab Manualmamaw231No ratings yet
- DC Motor ModelingDocument13 pagesDC Motor ModelingMuhammad SalmanNo ratings yet
- LINEAR INTEGRATED CIRCUIT - Question Bank (ECE, EIE & BME)Document7 pagesLINEAR INTEGRATED CIRCUIT - Question Bank (ECE, EIE & BME)MATHANKUMAR.SNo ratings yet
- Module4&5 - MicrocontrollerDocument50 pagesModule4&5 - Microcontrollerharshitha100% (2)
- Design of Feedback Control Systems 4th Ed PDFDocument860 pagesDesign of Feedback Control Systems 4th Ed PDFSucharitha SuchiNo ratings yet
- Access Full Complete Solution Manual Here: Chapter 1 SolutionsDocument8 pagesAccess Full Complete Solution Manual Here: Chapter 1 SolutionsKevin Carpio0% (1)
- CH2Document42 pagesCH2etayhailu100% (2)
- Half/Full Adder AndHalf/Full SubtractorDocument6 pagesHalf/Full Adder AndHalf/Full SubtractorJames Kevin Ignacio100% (10)
- RC Phase Shift OscillatorDocument4 pagesRC Phase Shift OscillatorReddyvari Venugopal67% (3)
- Electrical Systems Transfer Function ModelsDocument58 pagesElectrical Systems Transfer Function ModelsNoor Ahmed86% (7)
- Application of Differential Equation in ElectricalDocument9 pagesApplication of Differential Equation in ElectricalHaroon Malik100% (2)
- Interfacing DAC with 89C51Document6 pagesInterfacing DAC with 89C51Girish ChapleNo ratings yet
- Circuit Analysis TheoremsDocument44 pagesCircuit Analysis Theoremsfalilv9580% (20)
- Control Systems Unitwise Important Questions Unit 1 Part ADocument10 pagesControl Systems Unitwise Important Questions Unit 1 Part AChandra shekarNo ratings yet
- Laplace Transform Example SolutionDocument105 pagesLaplace Transform Example SolutionJed Efraim Espanillo100% (4)
- Rectifier and Filter Sample Problems: Transformers, Diodes, Voltage RippleDocument4 pagesRectifier and Filter Sample Problems: Transformers, Diodes, Voltage Ripplerein1657% (7)
- Solutions To Skill-Assessment ExercisesDocument53 pagesSolutions To Skill-Assessment ExercisesKatamba Rogers50% (2)
- Control SystemsDocument39 pagesControl SystemsKrushnasamy SuramaniyanNo ratings yet
- Solve equations and logarithmsDocument34 pagesSolve equations and logarithmsJojobaby5171467% (3)
- Appendix A and B ExercisesDocument5 pagesAppendix A and B ExercisesEdwin Johny Asnate SalazarNo ratings yet
- Open Problems and ConjecturesDocument4 pagesOpen Problems and ConjecturesGV Nguyen ChuNo ratings yet
- Exp-Function Method For Nonlinear Wave Equations: Ji-Huan He, Xu-Hong WuDocument9 pagesExp-Function Method For Nonlinear Wave Equations: Ji-Huan He, Xu-Hong Wufalcon_vamNo ratings yet
- Solutions Manual of Geometry and Discrete MathematicsDocument194 pagesSolutions Manual of Geometry and Discrete MathematicsAdha MoralesNo ratings yet
- Junkai Xie and Jonathan Tennyson - Variational Calculations of Vibrational Energy Levels For XY4 Molecules 2: Bending States of MethaneDocument10 pagesJunkai Xie and Jonathan Tennyson - Variational Calculations of Vibrational Energy Levels For XY4 Molecules 2: Bending States of MethaneWippetsxzNo ratings yet
- Root Locus: Illustrative ExampleDocument17 pagesRoot Locus: Illustrative Examplevaibhav471995No ratings yet
- Rezky Amalia Hamka - D41115017 PDFDocument24 pagesRezky Amalia Hamka - D41115017 PDFRezky Amalia HamkaNo ratings yet
- Solution To Exercise 5.11: Econometric Theory and MethodsDocument2 pagesSolution To Exercise 5.11: Econometric Theory and MethodsLeonard Gonzalo Saavedra AstopilcoNo ratings yet
- Beam Element in FEM/FEADocument24 pagesBeam Element in FEM/FEAOnkar KakadNo ratings yet
- Theon's LadderDocument11 pagesTheon's LadderLudwing EscandónNo ratings yet
- Gamma and Betta Function Adv Calculus SchaumDocument17 pagesGamma and Betta Function Adv Calculus SchaumSuta VijayaNo ratings yet
- ENGG2012 A&B Advanced Engineering Mathematics Solution 5: Tutor: Xixuan WuDocument6 pagesENGG2012 A&B Advanced Engineering Mathematics Solution 5: Tutor: Xixuan WuSaúl L Hdez TNo ratings yet
- ADI Methods Explained for Solving PDEsDocument9 pagesADI Methods Explained for Solving PDEssportcar2000No ratings yet
- 2015 PJC Prelim Paper 1 SolutionsDocument15 pages2015 PJC Prelim Paper 1 SolutionsnasyrahNo ratings yet
- Sequences & Summations: Discrete Structure 1 Bscs 2Document14 pagesSequences & Summations: Discrete Structure 1 Bscs 2Jan Peter PiliNo ratings yet
- Aircraft Control Lecture 9Document33 pagesAircraft Control Lecture 9Arief HadiyantoNo ratings yet
- Understanding Cryptography SOLUTIONSDocument26 pagesUnderstanding Cryptography SOLUTIONSzumri82% (17)
- Lecture 8Document13 pagesLecture 8Prakash KancharlaNo ratings yet
- (2012) MEIII (Midterm) PDFDocument8 pages(2012) MEIII (Midterm) PDFTai-Yuan HsuNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Introduction To Digital SystemsDocument10 pagesIntroduction To Digital SystemsAdonay YirgaNo ratings yet
- Ch18 1 25 05Document38 pagesCh18 1 25 05Carraan Dandeettirra Caala AltakkatakkaNo ratings yet
- LectureNotes 17 PDFDocument2 pagesLectureNotes 17 PDFCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Magnetic Properties of MaterialsDocument27 pagesMagnetic Properties of MaterialsLavkesh LachhvaniNo ratings yet
- Imc Pid PDFDocument29 pagesImc Pid PDFGopi PasalaNo ratings yet
- 19573Document27 pages19573svgl123No ratings yet
- Control Systems IDocument340 pagesControl Systems ICarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Introduction To Digital SystemsDocument10 pagesIntroduction To Digital SystemsAdonay YirgaNo ratings yet
- Block Diagram Reduction PDFDocument9 pagesBlock Diagram Reduction PDFCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- 07 PID ControllerDocument60 pages07 PID ControllerCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Best Int ControlDocument77 pagesBest Int ControlhinsermuNo ratings yet
- Chapter 10 PID 1Document36 pagesChapter 10 PID 1Carraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Block Diagram Reduction PDFDocument9 pagesBlock Diagram Reduction PDFCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Nagoor Kani Control SystemsDocument209 pagesNagoor Kani Control SystemsAnonymous eWMnRr70q71% (35)
- 07 PID ControllerDocument25 pages07 PID ControllerZuhair HamzaNo ratings yet
- Chap1 PropertiesDocument1 pageChap1 Propertiesshibeeshak_897835353No ratings yet
- FY Eng PDFDocument36 pagesFY Eng PDFCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Signal Hand OutDocument17 pagesSignal Hand OutCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- 1Document2 pages1Gaja RajSekarNo ratings yet
- 07 PID ControllerDocument25 pages07 PID ControllerZuhair HamzaNo ratings yet
- MIMODocument38 pagesMIMOIhwan FauziNo ratings yet
- Chapter 1Document17 pagesChapter 1Carraan Dandeettirra Caala AltakkatakkaNo ratings yet
- 1Document2 pages1Gaja RajSekarNo ratings yet
- Second Order Systems ProgrammingDocument1 pageSecond Order Systems ProgrammingCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Introduction To Industrial Automation: Electrical and Computer Engineering Department February 2017Document19 pagesIntroduction To Industrial Automation: Electrical and Computer Engineering Department February 2017Carraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Introduction To Industrial Automation: Electrical and Computer Engineering Department February 2017Document19 pagesIntroduction To Industrial Automation: Electrical and Computer Engineering Department February 2017Carraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Chapter 10Document93 pagesChapter 10Carraan Dandeettirra Caala Altakkatakka100% (1)
- James Carstens, Automatic Control Systems and ComponentsDocument131 pagesJames Carstens, Automatic Control Systems and ComponentsCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Experiment 3 (Characteristics of Open-Loop and Close-Loop Systems) Final ReportDocument19 pagesExperiment 3 (Characteristics of Open-Loop and Close-Loop Systems) Final ReportCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Top 145 Database Terms DictionaryDocument13 pagesTop 145 Database Terms DictionaryUnais_No ratings yet
- Ln26r71bd Ln-s2652d Ln26r71b Ln32r71bd LN s3252d DiagramaDocument261 pagesLn26r71bd Ln-s2652d Ln26r71b Ln32r71bd LN s3252d DiagramaVictor Julio AlvarezNo ratings yet
- 3.B Coating Maintenance CHEMCODocument51 pages3.B Coating Maintenance CHEMCOMeleti Meleti MeletiouNo ratings yet
- Swift 2002 Annual ReportDocument53 pagesSwift 2002 Annual ReportFlaviub23No ratings yet
- Offline Typing Project WorkDocument2 pagesOffline Typing Project WorkUsman al-HassamNo ratings yet
- Wireless DoorbellDocument20 pagesWireless Doorbellmujahed1987No ratings yet
- Chiller Selection Made Easier With myPLV™Document12 pagesChiller Selection Made Easier With myPLV™Omair FarooqNo ratings yet
- HTML5 Element Cheatsheet 2019Document1 pageHTML5 Element Cheatsheet 2019vVvNo ratings yet
- Oracle Service Procurement Advisory & ConsultingDocument22 pagesOracle Service Procurement Advisory & ConsultingPrakashNo ratings yet
- Julian Assange Why The World Needs Wikileaks: General InstructionsDocument1 pageJulian Assange Why The World Needs Wikileaks: General InstructionsChris CiervoNo ratings yet
- 1281 - Fire Extinguisher and Fire Safety Products Brochure S - tcm431-48382Document16 pages1281 - Fire Extinguisher and Fire Safety Products Brochure S - tcm431-48382Cv. muda karya jayaNo ratings yet
- Djdusty VideolistDocument302 pagesDjdusty VideolistgonduNo ratings yet
- MELHORES SITES DE INFOPRODUTOS PLR E SUAS RANKS NO ALEXADocument8 pagesMELHORES SITES DE INFOPRODUTOS PLR E SUAS RANKS NO ALEXAAlexandre Silva100% (2)
- Aircraft Maintanence Engg Book 9A TypeDocument139 pagesAircraft Maintanence Engg Book 9A TypeimmortalforeverNo ratings yet
- How to Size a Fire Pump and Understand Performance CurvesDocument12 pagesHow to Size a Fire Pump and Understand Performance CurvesAmar kobitaNo ratings yet
- F940wgot TWD Installation MDocument8 pagesF940wgot TWD Installation Mchaubinhkhang110686No ratings yet
- KSSR - MatematikDocument6 pagesKSSR - MatematikFaris FarhanNo ratings yet
- Medical Robot ReportDocument21 pagesMedical Robot Reporta_m_shihaNo ratings yet
- Media Planning BasicDocument142 pagesMedia Planning BasicHanif Lakdawala100% (1)
- Threadmilling Brochure SecoDocument16 pagesThreadmilling Brochure SecoIvica LabudovicNo ratings yet
- BDC Program To Create Routings Through BDCDocument10 pagesBDC Program To Create Routings Through BDCswapnil_265051509No ratings yet
- PDF Ebook Pickle Things by Marc Brown Download BookDocument5 pagesPDF Ebook Pickle Things by Marc Brown Download BookCorissNo ratings yet
- Blackberry Enterprise Server For Microsoft Exchange: Troubleshooting GuideDocument48 pagesBlackberry Enterprise Server For Microsoft Exchange: Troubleshooting GuideKhaled AjouzNo ratings yet
- Manual de Partes Gen Set DQFADDocument272 pagesManual de Partes Gen Set DQFADJorge Calcaneo MartinezNo ratings yet
- BNI Vision April 2023 Roster BookDocument16 pagesBNI Vision April 2023 Roster BookTushar MohiteNo ratings yet
- SM-800.11 TypeM Plus ValvesDocument13 pagesSM-800.11 TypeM Plus ValvesAdel AhmedNo ratings yet
- Manual ReaperDocument466 pagesManual ReaperJuan Camilo Arroyave ArangoNo ratings yet
- 1989 Volvo 740 Instruments and ControlsDocument107 pages1989 Volvo 740 Instruments and Controlsskyliner538No ratings yet
- MMDS Indoor/Outdoor Transmitter Manual: Chengdu Tengyue Electronics Co., LTDDocument6 pagesMMDS Indoor/Outdoor Transmitter Manual: Chengdu Tengyue Electronics Co., LTDHenry Jose OlavarrietaNo ratings yet
- Lets Play BingoDocument17 pagesLets Play BingoRosana SanchezNo ratings yet