You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Optimization of The Multi Level Spring Restrainer For Bridges by Hybrid Particle Swarm and Gravitational Search AlgorithmDocument13 pagesOptimization of The Multi Level Spring Restrainer For Bridges by Hybrid Particle Swarm and Gravitational Search AlgorithmGogyNo ratings yet
- Productivity Analysis and Associated Risks in Steel StructuresDocument18 pagesProductivity Analysis and Associated Risks in Steel StructuresGogyNo ratings yet
- Investigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueDocument19 pagesInvestigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueGogyNo ratings yet
- Exploring Buckling and Post-Buckling Behavior of Incompressible Hyperelastic Beams Through Innovative Experimental and Computational ApproachesDocument21 pagesExploring Buckling and Post-Buckling Behavior of Incompressible Hyperelastic Beams Through Innovative Experimental and Computational ApproachesGogyNo ratings yet
- Shapes of Energy - Active Segments of Steel BuildingDocument14 pagesShapes of Energy - Active Segments of Steel BuildingGogyNo ratings yet
- Global Sensitivity Analysis For Bridge Crane System by Surrogate ModelingDocument17 pagesGlobal Sensitivity Analysis For Bridge Crane System by Surrogate ModelingGogyNo ratings yet
- Cat Hunting Optimization Algorithm: A Novel Optimization AlgorithmDocument23 pagesCat Hunting Optimization Algorithm: A Novel Optimization AlgorithmGogyNo ratings yet
- Training Simulator For Acquiring Operational Skill To Operate Overhead Traveling Crane While Suppressing Load SwayDocument13 pagesTraining Simulator For Acquiring Operational Skill To Operate Overhead Traveling Crane While Suppressing Load SwayGogyNo ratings yet
- Intelligent Skin and Occupancy in The Context of Increasing Energy Efficiency in BuildingsDocument8 pagesIntelligent Skin and Occupancy in The Context of Increasing Energy Efficiency in BuildingsGogyNo ratings yet
- Mechanical Analysis of Forged Steel Ramshorn Hook-An Experimental StudyDocument6 pagesMechanical Analysis of Forged Steel Ramshorn Hook-An Experimental StudyGogyNo ratings yet
- Design Optimization of Bullock Cart YokeDocument9 pagesDesign Optimization of Bullock Cart YokeGogyNo ratings yet
- Female Musicians and DancersDocument60 pagesFemale Musicians and DancersGogyNo ratings yet
- Considering The Moment Effect On The Bolts' Circular Distribution in The End-Plate ConnectionDocument9 pagesConsidering The Moment Effect On The Bolts' Circular Distribution in The End-Plate ConnectionGogyNo ratings yet
- Curvilinear Mesh AdaptationDocument15 pagesCurvilinear Mesh AdaptationGogyNo ratings yet
- Failure Modes of Pumps' Mechanical Parts and Coating Solutions For Wear ProblemsDocument101 pagesFailure Modes of Pumps' Mechanical Parts and Coating Solutions For Wear ProblemsGogyNo ratings yet
- Contemporary Meets Old in Rehabilitating Historic BuildingsDocument13 pagesContemporary Meets Old in Rehabilitating Historic BuildingsGogyNo ratings yet
- Lifting BEAMSDocument90 pagesLifting BEAMSGogyNo ratings yet
- Assessment of Virtual Reality Based Safety Training Simulator For Electric Overhead Crane OperationsDocument13 pagesAssessment of Virtual Reality Based Safety Training Simulator For Electric Overhead Crane OperationsGogyNo ratings yet
- Process Cranes ReferencesDocument62 pagesProcess Cranes ReferencesGogyNo ratings yet
- A Virtual Reality System For Training OperatorsDocument3 pagesA Virtual Reality System For Training OperatorsGogyNo ratings yet
- Referenz Broschuere - WoerthDocument2 pagesReferenz Broschuere - WoerthGogyNo ratings yet
- Rolling Mill - Foundry AuctionDocument10 pagesRolling Mill - Foundry AuctionGogyNo ratings yet
- Gis - Travelling CranesDocument20 pagesGis - Travelling CranesGogyNo ratings yet
- Automatic Design Algorithms For Securing The Ground Contact Stability of Mobile CranesDocument13 pagesAutomatic Design Algorithms For Securing The Ground Contact Stability of Mobile CranesGogyNo ratings yet
- Technical Specification For Double Girder Eot Crane For CW Pump HouseDocument212 pagesTechnical Specification For Double Girder Eot Crane For CW Pump HouseGogyNo ratings yet
- O Brien - Lifting SolutionsDocument12 pagesO Brien - Lifting SolutionsGogyNo ratings yet
- Metals Recycling Engineering - Asia LTDDocument9 pagesMetals Recycling Engineering - Asia LTDGogyNo ratings yet
- Single Girder, Double Truss CranesDocument2 pagesSingle Girder, Double Truss CranesGogyNo ratings yet
- Rough Terrain Telescopic Boom CraneDocument4 pagesRough Terrain Telescopic Boom CraneGogyNo ratings yet
- Scott Brass - Web BrochureDocument10 pagesScott Brass - Web BrochureGogyNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Question Bank MOD and Indefinite IntegrationDocument15 pagesQuestion Bank MOD and Indefinite IntegrationRAKTIM ROUTHNo ratings yet
- Zipline Reference 3Document11 pagesZipline Reference 3Jomo-Rhys GilmanNo ratings yet
- 2008 June C3 Mark SchemeDocument3 pages2008 June C3 Mark Schemeimoan300No ratings yet
- 25 Trigonometric FunctionsDocument29 pages25 Trigonometric FunctionsSachin KumarNo ratings yet
- AoPS ComplexNumbersDocument6 pagesAoPS ComplexNumbersnuzhat NusaibaNo ratings yet
- Kumar: AGC Simulator Price-Based Operation-Part 11: Case Study ResultsDocument6 pagesKumar: AGC Simulator Price-Based Operation-Part 11: Case Study ResultsLeela KrishnaNo ratings yet
- Table of Z-Transform PairsDocument2 pagesTable of Z-Transform PairsKelly BerryNo ratings yet
- Electronics BookDocument183 pagesElectronics BookYasir SulemanNo ratings yet
- Math Olympiad CurriculumDocument7 pagesMath Olympiad Curriculumamit poddarNo ratings yet
- Math Class XDocument101 pagesMath Class Xaikluss0% (1)
- UPSEE Sample Papers 4 (UPSEE Maths Question Paper 2)Document6 pagesUPSEE Sample Papers 4 (UPSEE Maths Question Paper 2)Firdosh KhanNo ratings yet
- Mcgill University Faculty of Science Department of Mathematics and StatisticsDocument45 pagesMcgill University Faculty of Science Department of Mathematics and StatisticsjackNo ratings yet
- Budget of Work in Mathematics 10 Second QuarterDocument4 pagesBudget of Work in Mathematics 10 Second QuarterShirley Morales Ludovice100% (1)
- Calculus II: Lectures On Differential Equations: Kimball Martin December 9, 2015Document16 pagesCalculus II: Lectures On Differential Equations: Kimball Martin December 9, 2015Marvin LabajoNo ratings yet
- Differentiation: SFM 1002 Mathematics II Chapter 2 DifferentiationDocument17 pagesDifferentiation: SFM 1002 Mathematics II Chapter 2 DifferentiationMuhamad NazrinNo ratings yet
- Trigonometry - Primary Trigonometric Ratios - Lengths All PDFDocument12 pagesTrigonometry - Primary Trigonometric Ratios - Lengths All PDFElaine BatistaNo ratings yet
- Precal PDFDocument239 pagesPrecal PDFDeniell Joyce MarquezNo ratings yet
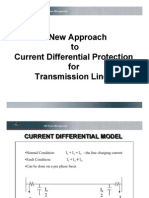
- A New Approach To Current Differential Protection For Transmission LinesDocument25 pagesA New Approach To Current Differential Protection For Transmission LinesChandika PereraNo ratings yet
- Full Download Solution Manual For Thomas Calculus 14th Edition Joel R Hass Christopher e Heil Maurice D Weir PDF Full ChapterDocument36 pagesFull Download Solution Manual For Thomas Calculus 14th Edition Joel R Hass Christopher e Heil Maurice D Weir PDF Full Chapteruniteacerichgsib80% (30)
- Mathematics Ia CompDocument19 pagesMathematics Ia CompAnonymous umm8CDYcpMNo ratings yet
- Story of TrigonometryDocument16 pagesStory of TrigonometryAkshat Jain100% (1)
- 28 36Document10 pages28 36Carlos Moran CepedaNo ratings yet
- Exploration (AS) : Lesson Title: Angles Formed by Secants and Tangents Learning CompetenciesDocument6 pagesExploration (AS) : Lesson Title: Angles Formed by Secants and Tangents Learning CompetenciesTiffany Joy Lencioco GambalanNo ratings yet
- Elec1111 - T08 - S2 2018Document57 pagesElec1111 - T08 - S2 2018Conqueror VictoryNo ratings yet
- Chapter # 10Document13 pagesChapter # 10meerab zahidNo ratings yet
- C Programming PDFDocument171 pagesC Programming PDFMad CommentatorNo ratings yet
- Lesson5A Continuity of A Function v1Document13 pagesLesson5A Continuity of A Function v1Charmene CambaNo ratings yet
- Friction and ShoesDocument9 pagesFriction and ShoesAudrey TanNo ratings yet
- Maths T Trial Sem 1 PCGHSDocument3 pagesMaths T Trial Sem 1 PCGHSKang Chia UiNo ratings yet
- Faculty Recruitment Test: Apt, Sat-Ii, Iit - Jee & IoDocument2 pagesFaculty Recruitment Test: Apt, Sat-Ii, Iit - Jee & IoArijit SinghNo ratings yet