You might also like
- Curso de Fotografia Digital: 40 HorasDocument35 pagesCurso de Fotografia Digital: 40 HorasAdriana Britto100% (1)
- Receção de HotelDocument117 pagesReceção de HotelBrielSilcaNo ratings yet
- Bpo - 2291-2291-1-PBDocument18 pagesBpo - 2291-2291-1-PBalesorianoNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Trabalho A Quente - 2004Document14 pagesTrabalho A Quente - 2004api-3838787No ratings yet
- T Energia Geotermica3Document32 pagesT Energia Geotermica3api-3838787100% (3)
- Relatorio Optica OndulatoriaDocument15 pagesRelatorio Optica Ondulatoriaapi-3838787100% (1)
- Optic ADocument30 pagesOptic Aapi-3838787No ratings yet
- Aquisições emergenciais para enfrentar coronavírusDocument13 pagesAquisições emergenciais para enfrentar coronavírusSebastião JuniorNo ratings yet
- Lista de verificação para inclusão de arma por compra na indústria nacionalDocument1 pageLista de verificação para inclusão de arma por compra na indústria nacionalNet WalkerNo ratings yet
- 2021 BMW 3 Series 28Document474 pages2021 BMW 3 Series 28Thiago MolverstetNo ratings yet
- Manual do Aluno Village Park DogDocument4 pagesManual do Aluno Village Park DogSadm SorocabaNo ratings yet
- Habilidades e ProfissõesDocument10 pagesHabilidades e Profissõeslucaspt1000No ratings yet
- 3 ObjetivaDocument4 pages3 ObjetivaViviane Araujo50% (2)
- Física e Química - Movimento circular e retilíneoDocument2 pagesFísica e Química - Movimento circular e retilíneoDiogo SIlvaNo ratings yet
- CatalogoDocument72 pagesCatalogoQue torcida é essa.No ratings yet
- Virtual Wi Fi Router Download BaixakiDocument8 pagesVirtual Wi Fi Router Download BaixakiPauloNo ratings yet
- Mapa - Far - Farmacologia Aplicada - 52-2023Document2 pagesMapa - Far - Farmacologia Aplicada - 52-2023Cavalini Assessoria AcadêmicaNo ratings yet
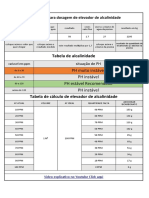
- Tabela de AlcalinidadeDocument1 pageTabela de AlcalinidadeedsonNo ratings yet
- Relatório Financeiro 2022Document3 pagesRelatório Financeiro 2022Diogo FranciscoNo ratings yet
- Síndrome do chicote: revisão sobre lesão por aceleração cervicalDocument5 pagesSíndrome do chicote: revisão sobre lesão por aceleração cervicalCatarina DiasNo ratings yet
- Fibra Tipo 3Document5 pagesFibra Tipo 3Edimilson LanaNo ratings yet
- SimposioANPEPP 2008Document178 pagesSimposioANPEPP 2008Hábilis Augusto BiazottoNo ratings yet
- O banco mais vantajoso: a esmolaDocument65 pagesO banco mais vantajoso: a esmolaParistomas Reports CenterNo ratings yet
- Estatuto do servidor DiademaDocument46 pagesEstatuto do servidor Diademajmaj jmajNo ratings yet
- Orgânica3 Hidrocarbonetos (Parte1)Document21 pagesOrgânica3 Hidrocarbonetos (Parte1)Lorenzo RamosNo ratings yet
- Portugal - Marcas de Contrast Aria e de ResponsabilidadeDocument3 pagesPortugal - Marcas de Contrast Aria e de ResponsabilidadeClara RamosNo ratings yet
- Growth suplementos pagamentoDocument1 pageGrowth suplementos pagamentoEu sou o pai do YOUTUBENo ratings yet
- Sistema tratamento efluentes residência 4 pessoasDocument3 pagesSistema tratamento efluentes residência 4 pessoasweber100% (1)
- Halliday 3 - Cap 31Document8 pagesHalliday 3 - Cap 31Peter DutaNo ratings yet
- Trading in Zone - Portugues - PDF - Análise Técnica - LuaDocument184 pagesTrading in Zone - Portugues - PDF - Análise Técnica - LuaRudy Gay StruamNo ratings yet
- Apostila 02 - Educação Física-EJA-2º Bimestre - 2ºquadrimestre - FASE IXDocument2 pagesApostila 02 - Educação Física-EJA-2º Bimestre - 2ºquadrimestre - FASE IXBruna AuadNo ratings yet
- Procedimento Operacional Padrão: TituloDocument7 pagesProcedimento Operacional Padrão: TituloDeyvid OliveiraNo ratings yet
- Fispq BL153Document9 pagesFispq BL153ariosiNo ratings yet