You might also like
- Practica 3 MosfetDocument6 pagesPractica 3 MosfetAlvaro BarronNo ratings yet
- Práctica 3 Rectificador Tipo Puente Trifásico (Onda Completa)Document25 pagesPráctica 3 Rectificador Tipo Puente Trifásico (Onda Completa)maryle_elyramNo ratings yet
- Diagrama Unifilar Subestacion Tecnologico de CDDocument3 pagesDiagrama Unifilar Subestacion Tecnologico de CDandyNo ratings yet
- Informe Puente HDocument6 pagesInforme Puente HJonathan Gomez100% (1)
- Aplicaciones de BJT Como InterruptorDocument4 pagesAplicaciones de BJT Como Interruptorlimaroga100% (2)
- Resonancia Serie - ParaleloDocument10 pagesResonancia Serie - ParaleloDavis KailNo ratings yet
- Rectificadores de Media Onda Con Carga RLDocument4 pagesRectificadores de Media Onda Con Carga RLVictoria YánezNo ratings yet
- Lab Ujt en Circuitos de Disparo SCRDocument8 pagesLab Ujt en Circuitos de Disparo SCRThalia Morel100% (2)
- Detector de Cruce Por CeroDocument3 pagesDetector de Cruce Por Ceroricardo torres reyesNo ratings yet
- Sistema Automatico de Iluminación Con LDR Practica 3 S A I C LDRDocument35 pagesSistema Automatico de Iluminación Con LDR Practica 3 S A I C LDRBio Sampler100% (2)
- Convertidores Cuk - ResonantesDocument7 pagesConvertidores Cuk - ResonantesSanty FloresNo ratings yet
- Sensores de Reactancia VariableDocument41 pagesSensores de Reactancia Variableqlx4No ratings yet
- Control motor CC puente HDocument12 pagesControl motor CC puente Hjflores_886366100% (1)
- Ensayo"Inversor DC/AC de Onda Pura para Cargas Monofasicas A Traves de SPWM Con Microcontroladores"Document4 pagesEnsayo"Inversor DC/AC de Onda Pura para Cargas Monofasicas A Traves de SPWM Con Microcontroladores"Jaime Potes PardoNo ratings yet
- Dimmer InformeDocument9 pagesDimmer InformeMary Alarcon Palomino100% (1)
- Marco Teorico InversorDocument1 pageMarco Teorico InversorDiana CarolinaNo ratings yet
- INFORME 11 Transisitor Como ConmutadorDocument3 pagesINFORME 11 Transisitor Como ConmutadorLuis Camilo PerezNo ratings yet
- Características de Los Semiconductores Extrínsecos de Tipo N y Tipo PDocument3 pagesCaracterísticas de Los Semiconductores Extrínsecos de Tipo N y Tipo PMauricio Fernando Tobar Rogel0% (2)
- Objetivos GeneralesDocument5 pagesObjetivos GeneralesAbraham OMNo ratings yet
- El Puente HDocument75 pagesEl Puente HElias Wilder Solano HuaroccNo ratings yet
- Convertidor tensión-corriente con carga flotanteDocument3 pagesConvertidor tensión-corriente con carga flotanteCristian CuevasNo ratings yet
- Libro de Códigos de Dispositivos de Montaje SuperficialDocument3 pagesLibro de Códigos de Dispositivos de Montaje SuperficialLuis Eduardo Cardenas RodriguezNo ratings yet
- Ejemplos Resueltos Convertidor de CukDocument12 pagesEjemplos Resueltos Convertidor de CukRonaldRodriguezSantos0% (1)
- Transistor de Inducción EstáticaDocument12 pagesTransistor de Inducción EstáticaAlxNelSonCarrascoArauco100% (2)
- Reporte Practica 2 Electronica Analogica - Meca - ADocument12 pagesReporte Practica 2 Electronica Analogica - Meca - AGerardo JM Palacios100% (1)
- Informe Potencia Proyecto 03 InversorDocument21 pagesInforme Potencia Proyecto 03 InversorSantiago Medina Torres75% (4)
- Optotriac JPGDocument3 pagesOptotriac JPGosmar0% (1)
- Informe 1 Digital Transistor Como InterruptorDocument5 pagesInforme 1 Digital Transistor Como Interruptorfrancisco0% (1)
- Reporte de Practica 5. Circuito de Disparo para TRIACDocument6 pagesReporte de Practica 5. Circuito de Disparo para TRIACjoseyliNo ratings yet
- Práctica 2 SCRDocument30 pagesPráctica 2 SCRMaryle Nuñez50% (6)
- Electrónica de Potencia U5Document10 pagesElectrónica de Potencia U5MarcoLunaRiosNo ratings yet
- Reloj digital 24 horasDocument6 pagesReloj digital 24 horasJavier Alberto MontañaNo ratings yet
- El Transistor Como AmplificadorDocument4 pagesEl Transistor Como AmplificadorMARTIN RODOLFO LIZOLA GOMEZNo ratings yet
- Caracteristicas de Un Interruptor Practico e IdealDocument2 pagesCaracteristicas de Un Interruptor Practico e IdealAlfredo MedinaNo ratings yet
- Choppers o TroceadoresDocument4 pagesChoppers o TroceadoresJorge Zevallos100% (1)
- Conversores AC ACDocument11 pagesConversores AC ACNelson David de la CruzNo ratings yet
- Convertidor CukDocument6 pagesConvertidor CukFernanda Zepeda AlcarazNo ratings yet
- Informe Practica Polarizacion de TransistoresDocument19 pagesInforme Practica Polarizacion de TransistoresAngie CaguaNo ratings yet
- Introducción Al PWMDocument4 pagesIntroducción Al PWMZam HernandezNo ratings yet
- Pre Informe Detector Cruze Por CeroDocument10 pagesPre Informe Detector Cruze Por CeroRicardo Alfonso Martínez AzaNo ratings yet
- MEZ3AUDIDocument22 pagesMEZ3AUDIEmma Vaness Estrada0% (1)
- Funcionamiento Del FlybackDocument3 pagesFuncionamiento Del FlybackFabian CortesNo ratings yet
- Polos DominantesDocument1 pagePolos DominantesIvan50% (2)
- Puente HDocument44 pagesPuente HCristian Andrés Pañi100% (1)
- Convertidores de CA-CD Y CD-CADocument16 pagesConvertidores de CA-CD Y CD-CAEnrique GarciaNo ratings yet
- ControlPosiciónMotorDCDocument2 pagesControlPosiciónMotorDCJose GarciaNo ratings yet
- Simulación circuitos eléctricos MultisimDocument5 pagesSimulación circuitos eléctricos MultisimDavid Adolfo Paez MolinaNo ratings yet
- Rectificadores SemicontroladosDocument4 pagesRectificadores SemicontroladosLeonardo Jose Hernandez0% (1)
- Fuentes conmutadas DC: regulación por PWMDocument4 pagesFuentes conmutadas DC: regulación por PWMMarcoNo ratings yet
- Rectificación trifásica controladaDocument6 pagesRectificación trifásica controladaJohn M. Romero100% (1)
- Proyecto Final IGBTDocument18 pagesProyecto Final IGBTReadlion70% (1)
- Circuito de Excitacion de Un Transistor MosfetDocument10 pagesCircuito de Excitacion de Un Transistor MosfetAlejandro MaldonadoNo ratings yet
- Aplicaciones y circuitos del SCRDocument4 pagesAplicaciones y circuitos del SCRayleen259050% (2)
- Deber RepasoDocument29 pagesDeber RepasoOjo MaestroNo ratings yet
- Practica 2 GonzoDocument13 pagesPractica 2 GonzoWarbear SlaughterNo ratings yet
- Amplificadores MultietapaDocument44 pagesAmplificadores MultietapaJonathan Polania100% (5)
- Un Transformador de Frecuencia Variable VFTDocument2 pagesUn Transformador de Frecuencia Variable VFTErnesto Torres Quiroga0% (1)
- Donde Se Utilizan Los CircuitosDocument2 pagesDonde Se Utilizan Los CircuitosJoe Chiscul EsquivesNo ratings yet
- Control Motor DCDocument45 pagesControl Motor DCAntony Miranda AsencioNo ratings yet
- Arrancador automático de motores CCDocument11 pagesArrancador automático de motores CCHéctor Carrión UrbanoNo ratings yet
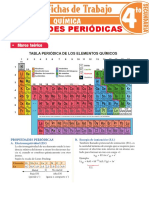
- Propiedades Periodicas para Cuarto Grado de SecundariaDocument5 pagesPropiedades Periodicas para Cuarto Grado de SecundariaLeandroCarlosManayayNo ratings yet
- Devocional 5 JobDocument6 pagesDevocional 5 JobElizzabethNo ratings yet
- Extensión de ArchivosDocument2 pagesExtensión de ArchivosLorena TanelliNo ratings yet
- EVALUACIÓN FORMATIVA INICIAL DIAGNÓSTICA, INTRODUCCIÓN A LA PSICOPEDAGOGÍA, Año 2022.Document4 pagesEVALUACIÓN FORMATIVA INICIAL DIAGNÓSTICA, INTRODUCCIÓN A LA PSICOPEDAGOGÍA, Año 2022.María José VegaNo ratings yet
- El Mercado, El Entorno y La CompetenciaDocument17 pagesEl Mercado, El Entorno y La CompetenciaMercedes NúñezNo ratings yet
- JoggingDocument27 pagesJogginglastspectral0% (1)
- Jose Moises Baeza Miranda CVDocument2 pagesJose Moises Baeza Miranda CVJose Baeza0% (1)
- El Viaje ImposibleDocument52 pagesEl Viaje ImposibleJosé Gregorio González MárquezNo ratings yet
- La Mujer en La Biblia - Opresión y LiberaciónDocument21 pagesLa Mujer en La Biblia - Opresión y LiberaciónByron Albizures GonzálezNo ratings yet
- Diferenciacion e Integracion NumericaDocument14 pagesDiferenciacion e Integracion NumericaEdic AbundezNo ratings yet
- GUIA 11 DETERMINACION DE PARAMETROS EDAFICOS ESTUDIADOS EN UNA CALICATA - RemovedDocument15 pagesGUIA 11 DETERMINACION DE PARAMETROS EDAFICOS ESTUDIADOS EN UNA CALICATA - RemovedjngavilanesNo ratings yet
- Act 11 Evidencia 6 Aceite de PalmaDocument4 pagesAct 11 Evidencia 6 Aceite de PalmaLaura GarzonNo ratings yet
- Plan de Trabajo de La Semana 2 Del 05 Al 09 de SeptiembreDocument22 pagesPlan de Trabajo de La Semana 2 Del 05 Al 09 de SeptiembreBen MosheNo ratings yet
- Evaluación parcial de Habilidades ComunicativasDocument6 pagesEvaluación parcial de Habilidades ComunicativasGILBERTH ITALO ROJAS CONDORNo ratings yet
- Libro Normas Tecnicas Final ComDocument94 pagesLibro Normas Tecnicas Final ComErikaPesántezNo ratings yet
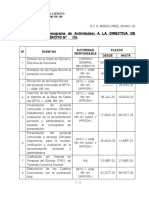
- 2 Anexo B Cronograma Actividades OficialessssDocument2 pages2 Anexo B Cronograma Actividades OficialessssS ErsNo ratings yet
- Investigacion de HistoriaDocument28 pagesInvestigacion de HistoriaJulian N Loeza ManzanillaNo ratings yet
- Decálogo del perfecto cuentistaDocument7 pagesDecálogo del perfecto cuentistaAna Rita VillarNo ratings yet
- Diagramas de FlujoDocument16 pagesDiagramas de Flujohamzabeddouka100% (3)
- Plan de Intervencion MunicipioDocument42 pagesPlan de Intervencion MunicipioKley Marquez VargasNo ratings yet
- QueratometriaDocument2 pagesQueratometriaEstrellita Hinostroza0% (1)
- 3 Costos EstimadosDocument5 pages3 Costos EstimadosCarol Patricia Micá PérezNo ratings yet
- Caso SturbucksDocument15 pagesCaso SturbucksEliecer Roberto Escobar GonzalezNo ratings yet
- Teoría, género y ciencia ficciónDocument17 pagesTeoría, género y ciencia ficciónMorganitaSurrealismeNo ratings yet
- Preguntas H1Document92 pagesPreguntas H1Alejandro MarínNo ratings yet
- Rentas FraccionadasDocument22 pagesRentas FraccionadasFelipe Augusto Diaz SuazaNo ratings yet
- ANÁLISIS DE PROCESALISTAS SURAMERICANOS SOBRE LA ACCIÓNDocument11 pagesANÁLISIS DE PROCESALISTAS SURAMERICANOS SOBRE LA ACCIÓNrybintegralservicesNo ratings yet
- Eu Digital Covid Certificate / Certificado Covid Digital de La Ue / Eb-Ko Covid Ziurtagiri Digitala Vaccination Vacunación TxertaketaDocument1 pageEu Digital Covid Certificate / Certificado Covid Digital de La Ue / Eb-Ko Covid Ziurtagiri Digitala Vaccination Vacunación TxertaketaJoxe PaposNo ratings yet
- Futuro de los estudiantes universitarios en Colombia durante la pandemiaDocument4 pagesFuturo de los estudiantes universitarios en Colombia durante la pandemialuis lopezNo ratings yet
- Act 16Document5 pagesAct 16Keissy Ivette Sandoval GonzálezNo ratings yet