You might also like
- Maintenance Manual: FANUC Series 0+-MODEL D FANUC Series 0+ Mate-MODEL DDocument636 pagesMaintenance Manual: FANUC Series 0+-MODEL D FANUC Series 0+ Mate-MODEL D游本豐No ratings yet
- DP 4 3 Solution PDFDocument5 pagesDP 4 3 Solution PDFJessica IreneNo ratings yet
- Test Specification Table (Sample) : 1.0 Individual Assignment DescriptionDocument7 pagesTest Specification Table (Sample) : 1.0 Individual Assignment DescriptionSushil PaudelNo ratings yet
- WK 03Document2 pagesWK 03Ravi TejNo ratings yet
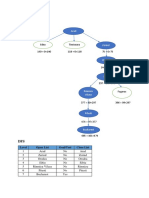
- Oradea: Bucharest Arad CraiovaDocument53 pagesOradea: Bucharest Arad CraiovaSamari JadeNo ratings yet
- Informed Search Algorithms: Chapter 3, Sections 5-6Document24 pagesInformed Search Algorithms: Chapter 3, Sections 5-6SridharNo ratings yet
- SEO Search Tutorial TitleDocument4 pagesSEO Search Tutorial Titlescribd_jayNo ratings yet
- A Star SearchDocument56 pagesA Star SearchAnonymous pEjvosqNo ratings yet
- CMPT 310 Midterm ExamDocument7 pagesCMPT 310 Midterm ExamSumiah AlalwaniNo ratings yet
- Informed Search and ExplorationDocument51 pagesInformed Search and ExplorationMinh ĐặngNo ratings yet
- Lect03 Problem Solving by SearchingDocument34 pagesLect03 Problem Solving by SearchingTrương Thuận KiệtNo ratings yet
- Homework 2Document5 pagesHomework 2Akanksha GundNo ratings yet
- Chap 3 A Basic SearchDocument36 pagesChap 3 A Basic SearchRushikesh GhatageNo ratings yet
- Chapter03a Annotated PDFDocument86 pagesChapter03a Annotated PDFUlaş TuraNo ratings yet
- Sibiu Timisoara: Level Open List Goal/Test Close ListDocument2 pagesSibiu Timisoara: Level Open List Goal/Test Close ListErcherio MarpaungNo ratings yet
- Popis GackoDocument2 pagesPopis Gackoveljkobratic90No ratings yet
- Best-First Search: Evaluation FunctionDocument6 pagesBest-First Search: Evaluation Functionapi-19801502No ratings yet
- Diversion DataDocument5 pagesDiversion DataNBC 10 WJARNo ratings yet
- Analyst Presentation FY 2020-21Document40 pagesAnalyst Presentation FY 2020-21Rahul Kumar VishwakarmaNo ratings yet
- GamaralDecanter World Wine Awards 2018 Special - August 2018Document247 pagesGamaralDecanter World Wine Awards 2018 Special - August 2018germano machado100% (2)
- A331 PlantDocument821 pagesA331 Plantchandu666creatorNo ratings yet
- Civil Aviation Authority Philippines Report Compares 2018 Aircraft Movements by Airline and AirportDocument10 pagesCivil Aviation Authority Philippines Report Compares 2018 Aircraft Movements by Airline and AirportKhristian SamalaNo ratings yet
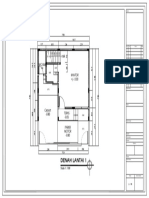
- Denah Lantai 1: Naik WC/KM KantorDocument1 pageDenah Lantai 1: Naik WC/KM KantorKinoy KirsamNo ratings yet
- Gasbill 4800349743 202403 20240315011615Document1 pageGasbill 4800349743 202403 20240315011615uzairabbasi96098No ratings yet
- Allowable Uniform Load Capacity (PSF) On SheathingDocument1 pageAllowable Uniform Load Capacity (PSF) On SheathingAgustin DellepianeNo ratings yet
- NHPC 23Document1 pageNHPC 23V thiajrajanNo ratings yet
- Staff Count - Pan IndiaDocument1 pageStaff Count - Pan IndiaAabidd BangiNo ratings yet
- Final RateDocument2 pagesFinal Ratemin100% (2)
- 516469777930091Document1 page516469777930091Rakesh ZaveriNo ratings yet
- Intro To Oil and Gas Piping EngineeringDocument29 pagesIntro To Oil and Gas Piping Engineeringkeen dela cruzNo ratings yet
- Prog 3Document2 pagesProg 3api-3705912No ratings yet
- Hill Climbing 1st in ClassDocument32 pagesHill Climbing 1st in Classapi-3705912No ratings yet
- Prog 7Document1 pageProg 7api-3705912No ratings yet
- Prog 4Document1 pageProg 4api-3705912No ratings yet
- Chapter 04 BDocument13 pagesChapter 04 Bapi-3705912No ratings yet
- Local Search Algorithms Vimp Show in Class Cse2Document14 pagesLocal Search Algorithms Vimp Show in Class Cse2api-3705912No ratings yet
- Prog 15Document2 pagesProg 15api-3705912No ratings yet
- Prog 2Document1 pageProg 2api-3705912No ratings yet
- Prog 1Document1 pageProg 1api-3705912No ratings yet
- Lessons 9Document16 pagesLessons 9api-3705912No ratings yet
- Prog 10Document1 pageProg 10api-3705912No ratings yet
- Chapter 03Document74 pagesChapter 03api-3705912No ratings yet
- Prog 14Document1 pageProg 14api-3705912No ratings yet
- m5 CSPDocument34 pagesm5 CSPapi-3705912No ratings yet
- Lesson 8Document9 pagesLesson 8api-3705912No ratings yet
- Hill Climbing MethodsDocument14 pagesHill Climbing Methodsapi-370591280% (5)
- m1 IntroDocument13 pagesm1 Introapoorva96No ratings yet
- Hill Climbing AlgorithmDocument49 pagesHill Climbing AlgorithmSafdar JafriNo ratings yet
- m2 AgentsDocument28 pagesm2 Agentsapi-3705912No ratings yet
- Chapter 03Document74 pagesChapter 03api-3705912No ratings yet
- CSP Imp Show in ClassDocument64 pagesCSP Imp Show in Classapi-3705912No ratings yet
- m3 SearchDocument56 pagesm3 SearchJack d'RebornedNo ratings yet
- AgentsDocument27 pagesAgentsAnonymous 7XvEM3No ratings yet
- Chapter 01Document27 pagesChapter 01api-3705912No ratings yet
- Complete RecordDocument73 pagesComplete Recordapi-3705912100% (1)
- ProgsDocument7 pagesProgsapi-3705912No ratings yet
- Wearable ComputingDocument2 pagesWearable Computingapi-3705912No ratings yet
- CS DebonairDocument1 pageCS Debonairapi-3705912No ratings yet
- HTMLDocument1 pageHTMLapi-3705912No ratings yet
- Prometheus Certified AssociateDocument513 pagesPrometheus Certified AssociateCHIBOZOR DURUNo ratings yet
- 16 FBD LabDocument28 pages16 FBD LabJavier Omar GinezNo ratings yet
- SDBG DSL Modem RouterDocument5 pagesSDBG DSL Modem RouterAlonzo HechoNo ratings yet
- Lecture 1 - Computer Abstractions and TechnologyDocument34 pagesLecture 1 - Computer Abstractions and TechnologyXrsamixNo ratings yet
- DLD 07 RegistersDocument10 pagesDLD 07 Registerszunaedz110No ratings yet
- Schematic) Is A Simplified Conventional Graphical Representation of AnDocument4 pagesSchematic) Is A Simplified Conventional Graphical Representation of AnRavi TejaNo ratings yet
- Learn JPA & Hibernate GuideDocument6 pagesLearn JPA & Hibernate GuideTomás Patricio Izquierdo KairúzNo ratings yet
- GOF (Structural Design Pattern) : BY: Suleman JunaidDocument13 pagesGOF (Structural Design Pattern) : BY: Suleman JunaidHamza AliNo ratings yet
- Java OS-Security Paper (Ieee Format)Document4 pagesJava OS-Security Paper (Ieee Format)Manoj SharmaNo ratings yet
- Alienware m15 r6 Service Manual en UsDocument92 pagesAlienware m15 r6 Service Manual en UsJerome BedardNo ratings yet
- 02 Addressing Modes 6800Document9 pages02 Addressing Modes 6800Rishabh GuptaNo ratings yet
- PalletTool Setup-FANUCDocument2 pagesPalletTool Setup-FANUCMario GonzalezNo ratings yet
- Wsjtx-Main-2.3.0 - en (USLetter)Document115 pagesWsjtx-Main-2.3.0 - en (USLetter)octavian barbuNo ratings yet
- MXK2 5 2 462RN - 830-04031-59Document90 pagesMXK2 5 2 462RN - 830-04031-59guillermoNo ratings yet
- CS Scheme OddDocument3 pagesCS Scheme OddHoneyNo ratings yet
- Game Manual: The Underwater Combat SimulationDocument41 pagesGame Manual: The Underwater Combat SimulationdaveagriffNo ratings yet
- Manual de Grub4dosDocument4 pagesManual de Grub4dosBalakNo ratings yet
- Summer Training AT S.R.S.A.C.: Project Name:-Super 6 WebserverDocument24 pagesSummer Training AT S.R.S.A.C.: Project Name:-Super 6 WebserverGaurav GoyalNo ratings yet
- Pcvue Iot Starter Kit: A Complete Solution To Build Your Iot Project From The Sensor To The PlantDocument3 pagesPcvue Iot Starter Kit: A Complete Solution To Build Your Iot Project From The Sensor To The PlantfabcostaNo ratings yet
- Splunk - Examdumps.splk 1001.v2020!04!24.by - Stanley.93qDocument38 pagesSplunk - Examdumps.splk 1001.v2020!04!24.by - Stanley.93qabhishek_singh10272No ratings yet
- Acknowledgement: Programming Concepts in C++Document22 pagesAcknowledgement: Programming Concepts in C++Vidur SharmaNo ratings yet
- cm4 DatasheetDocument30 pagescm4 DatasheetMohsen RajiNo ratings yet
- IoT Components and Layers ExplainedDocument4 pagesIoT Components and Layers ExplainedPujit SrivastavaNo ratings yet
- Ta020819 1 Benefitsspec Fin-Epic950Document2 pagesTa020819 1 Benefitsspec Fin-Epic950STEVEN WUNo ratings yet
- Aic Lab Cadence MM 07 gmID v01Document8 pagesAic Lab Cadence MM 07 gmID v01احمد علىNo ratings yet
- DIY USB Midi Controller With Arduino A Beginners GDocument55 pagesDIY USB Midi Controller With Arduino A Beginners GAndré CorenzanNo ratings yet
- StrataSync User's Guide 9.0 40319 Rev 000Document186 pagesStrataSync User's Guide 9.0 40319 Rev 000Tran Ngoc QuangNo ratings yet