You might also like
- Exercices d'intégrales de lignes, de surfaces et de volumesFrom EverandExercices d'intégrales de lignes, de surfaces et de volumesNo ratings yet
- Exercices d'intégrales et d'équations intégro-différentiellesFrom EverandExercices d'intégrales et d'équations intégro-différentiellesNo ratings yet
- 14 - Ondes Élastiques PDFDocument12 pages14 - Ondes Élastiques PDFDanem HalasNo ratings yet
- Chapitre 1 2 3 4 5 6 Cours RDMDocument52 pagesChapitre 1 2 3 4 5 6 Cours RDMmohamed bananeNo ratings yet
- TPgoniometremesureindicen PDFDocument5 pagesTPgoniometremesureindicen PDF지미라kim miraNo ratings yet
- TD Caractéristiques Géométrique Des SolidesDocument2 pagesTD Caractéristiques Géométrique Des Solidesorlandvianney100% (1)
- Cours Analyse NumeriqueDocument3 pagesCours Analyse NumeriqueMaria AminaNo ratings yet
- Torseur CinétiqueDocument8 pagesTorseur CinétiqueAhmed fattoumNo ratings yet
- INSA Toulouse 1A Mecanique Du Point Examen Mars 2009 CorrectionDocument2 pagesINSA Toulouse 1A Mecanique Du Point Examen Mars 2009 Correctionpurplera1n100% (1)
- Dynmq PT Mat - EXO - Enoncés - FRDocument11 pagesDynmq PT Mat - EXO - Enoncés - FRkaderNo ratings yet
- Boucetta Geo DiffDocument60 pagesBoucetta Geo DiffYOUSSEF AIT TIZINo ratings yet
- Nombres ComplexesDocument5 pagesNombres ComplexesStajila AlexandruNo ratings yet
- Cours Serie EntiereDocument21 pagesCours Serie EntiereÄbđøú Æzíz100% (1)
- Courbes Polaires PDFDocument13 pagesCourbes Polaires PDFWNo ratings yet
- DS1 - 2 Revision MpsiDocument4 pagesDS1 - 2 Revision MpsiAbdellah MazighiNo ratings yet
- TD4: Anneaux Noethériens Et Modules: Diego IzquierdoDocument6 pagesTD4: Anneaux Noethériens Et Modules: Diego IzquierdoyoussefNo ratings yet
- Tpe de Mecanique Rationnelle Du 08-10-2022Document12 pagesTpe de Mecanique Rationnelle Du 08-10-2022FOXNo ratings yet
- 437 Exercices Faisant Intervenir Des Variables Aléatoires PDFDocument2 pages437 Exercices Faisant Intervenir Des Variables Aléatoires PDFMohamed EL BERKAOUINo ratings yet
- Chap1 Sinusoide PhaseurDocument52 pagesChap1 Sinusoide Phaseuryq6t9c2q8mNo ratings yet
- S5 1718 MichelsonDocument25 pagesS5 1718 Michelsonammar wialNo ratings yet
- INSA Toulouse 1A Electrocinétique 1 2008/2009 Régimes ContinusDocument20 pagesINSA Toulouse 1A Electrocinétique 1 2008/2009 Régimes Continuspurplera1n100% (1)
- معجم المصطلحات -فيزياء SM-ST-MI-فرنسي-عربيDocument14 pagesمعجم المصطلحات -فيزياء SM-ST-MI-فرنسي-عربيabderrahim hafiedNo ratings yet
- 2023 Notice CpgeDocument32 pages2023 Notice Cpgeahmed aboulkacemNo ratings yet
- Chapitre 11 PDFDocument23 pagesChapitre 11 PDFBigburnen68No ratings yet
- Chapitre Mécanique Des StructuresDocument54 pagesChapitre Mécanique Des Structuresfatima zahra zaharNo ratings yet
- Ondes EM-videDocument59 pagesOndes EM-videtest100% (1)
- Physique Chimie 5Document3 pagesPhysique Chimie 5beebac2009No ratings yet
- Resolution Numerique Des Equations Aux Derivees PartiellesDocument22 pagesResolution Numerique Des Equations Aux Derivees PartiellesLyna Meriem LAZLAOUINo ratings yet
- TD 12020Document3 pagesTD 12020YOUSSEF AIT TIZINo ratings yet
- 117 Groupe Orthogonal D Un Ev Eucl de Dim 2 Ou 3Document3 pages117 Groupe Orthogonal D Un Ev Eucl de Dim 2 Ou 3Oudghiri Hassani Mehdi100% (1)
- 112 3 2 PDFDocument9 pages112 3 2 PDFeterlouNo ratings yet
- 9trigonajib1 PDFDocument16 pages9trigonajib1 PDFJohn Lwis100% (1)
- E Et Pi Transcendants PDFDocument13 pagesE Et Pi Transcendants PDFHamza AmmarNo ratings yet
- TD2: Fonction Riemann Intégrable, Intégrale de Riemann: Exercice 1Document2 pagesTD2: Fonction Riemann Intégrable, Intégrale de Riemann: Exercice 1AbdenourNo ratings yet
- Optique GeometrikDocument70 pagesOptique GeometrikcapkuroNo ratings yet
- ElectrostatiqueDocument1 pageElectrostatiqueabde ssamad greenNo ratings yet
- Chap 3 Meca Complet PDFDocument26 pagesChap 3 Meca Complet PDFMohamed mellahNo ratings yet
- Texier B. - Geometrie DifferentielleDocument108 pagesTexier B. - Geometrie DifferentiellepamathNo ratings yet
- DownloadAnalyse NumériqueDocument137 pagesDownloadAnalyse Numériquemahi23dz100% (1)
- Transformation de LegendreDocument4 pagesTransformation de LegendreAlbert ReimanNo ratings yet
- 1 Thermodynamique Classique Et Appliquée LicenceDocument85 pages1 Thermodynamique Classique Et Appliquée LicenceJean Luc NgouafongNo ratings yet
- Rdmtorseurdecohesion PDFDocument4 pagesRdmtorseurdecohesion PDFMustafa MoussaouiNo ratings yet
- Examen de Rattrapage Corrige de MDF 2011-2012 PDFDocument3 pagesExamen de Rattrapage Corrige de MDF 2011-2012 PDFkabli ilyass100% (1)
- MTH1101 Plan Cours A10Document6 pagesMTH1101 Plan Cours A10Yasser ChtainiNo ratings yet
- Cours Phys App 1CPIDocument87 pagesCours Phys App 1CPIABDELILAHNo ratings yet
- Cours 4ème Phys UAA3 Thème2Document12 pagesCours 4ème Phys UAA3 Thème2PikaChaozuNo ratings yet
- Alg 2Document33 pagesAlg 2KilgraveNo ratings yet
- Ex. Quilibre D'un Corps Solide 1Document1 pageEx. Quilibre D'un Corps Solide 1hakima032No ratings yet
- Calcul DifferentielDocument72 pagesCalcul DifferentielRachid KdidarNo ratings yet
- Bakir LatexDocument71 pagesBakir LatexridhaNo ratings yet
- Variable Complexe ImportantDocument103 pagesVariable Complexe ImportantAnonymous XNijipNo ratings yet
- Algèbre GénéraleDocument86 pagesAlgèbre Généraleremifahatse bosco0% (1)
- Creusement Des GaleriesDocument51 pagesCreusement Des GaleriesmohamedouffaNo ratings yet
- TassementsDocument23 pagesTassementsmohamedouffaNo ratings yet
- Universite 8 Mai 1945 Guelma ConformemenDocument283 pagesUniversite 8 Mai 1945 Guelma ConformemenmohamedouffaNo ratings yet
- Creusement Des Ouvrages SouterrainsDocument80 pagesCreusement Des Ouvrages Souterrainsmohamedouffa100% (1)
- Boulonnage Des RochesDocument8 pagesBoulonnage Des RochesmohamedouffaNo ratings yet
- Chapitre I TunnelsDocument92 pagesChapitre I TunnelsAhmedEzzaytouni100% (1)
- Cours ProductionDocument24 pagesCours ProductionSamia OmranNo ratings yet
- 2021UPSLM014 ArchivageDocument233 pages2021UPSLM014 ArchivagemohamedouffaNo ratings yet
- VentilationDocument20 pagesVentilationmohamedouffaNo ratings yet
- Guide FreinageDocument7 pagesGuide FreinagemohamedouffaNo ratings yet
- Chapitre 5 LES PRINCIPAUX MOYENS DE RECONNAISSANCE PDFDocument7 pagesChapitre 5 LES PRINCIPAUX MOYENS DE RECONNAISSANCE PDFMarouane El AmeliNo ratings yet
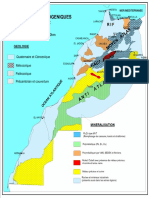
- Provinces Métallogéniquesmaroc PDFDocument1 pageProvinces Métallogéniquesmaroc PDFmohamedouffaNo ratings yet
- Béton Travaux Souterrains PDFDocument8 pagesBéton Travaux Souterrains PDFmohamedouffaNo ratings yet
- Tassements Travaux SouterrainsDocument10 pagesTassements Travaux SouterrainsmohamedouffaNo ratings yet
- Cours Murs EcransDocument50 pagesCours Murs EcransmohamedouffaNo ratings yet
- Ac1 Calcul Stabilité PentesDocument42 pagesAc1 Calcul Stabilité Penteskarem754100% (1)
- Droit MinierDocument8 pagesDroit MiniermohamedouffaNo ratings yet
- Ac1 Calcul Stabilité PentesDocument42 pagesAc1 Calcul Stabilité Penteskarem754100% (1)
- 05b Dimensionnement Choix VérinDocument7 pages05b Dimensionnement Choix VérinYoussef Glissi100% (1)
- Art8-1 2Document8 pagesArt8-1 2rababsouiahNo ratings yet
- Cyanuration AurifereDocument123 pagesCyanuration AuriferemohamedouffaNo ratings yet
- Provinces MétallogéniquesMarocDocument1 pageProvinces MétallogéniquesMarocmohamedouffaNo ratings yet
- Gestion Des Résidus de StérileDocument632 pagesGestion Des Résidus de StérileImad Soutaji100% (1)
- Laicité Et Etat CivilDocument10 pagesLaicité Et Etat CivilmohamedouffaNo ratings yet
- Le Manuel Du Technicien Photovoltaïque PDFDocument88 pagesLe Manuel Du Technicien Photovoltaïque PDFcompilerman200888% (8)
- 01 - Polycope ForageDocument61 pages01 - Polycope Foragehaouachem100% (8)
- Code Minier PDFDocument46 pagesCode Minier PDFMarzouguiAlaNo ratings yet
- Coursdephilosophie Albert MENDIRIDocument428 pagesCoursdephilosophie Albert MENDIRIStanislasNo ratings yet
- Éric Geoffroy: Le Pluralisme Religieux en Islam, Ou La Conscience de L'altéritéDocument44 pagesÉric Geoffroy: Le Pluralisme Religieux en Islam, Ou La Conscience de L'altéritéFondapol100% (2)
- Philosophie de La ReligionDocument37 pagesPhilosophie de La ReligionmohamedouffaNo ratings yet
- Fluid Mechanics NotesDocument199 pagesFluid Mechanics NotesNicolás Andrés Meza StandenNo ratings yet
- TP - MMC - Cercle de MohrDocument15 pagesTP - MMC - Cercle de MohrKhalilNo ratings yet
- CORRIGES EXERCICE DE MMC Inphb Janv 2020Document19 pagesCORRIGES EXERCICE DE MMC Inphb Janv 2020Jean Luc Yoboue100% (1)
- Exos M2Document4 pagesExos M2Yves-rolandN'guessanNo ratings yet
- Elasticite PDFDocument58 pagesElasticite PDFRedouane RedaNo ratings yet
- Cours MSD1 Palin-Luc 2007Document97 pagesCours MSD1 Palin-Luc 2007nini theking100% (1)
- Travaux Pratique de Mécanique Des Solides DéformablesDocument21 pagesTravaux Pratique de Mécanique Des Solides DéformablesMehdi Chams Eddine FarahNo ratings yet
- Géologie StructuraleDocument29 pagesGéologie Structuralekeassemon danielle mondesir100% (2)
- Harmonisation Offre de Formation Master Academique Génie Mécanique Construction MécaniqueDocument80 pagesHarmonisation Offre de Formation Master Academique Génie Mécanique Construction MécaniqueChaka BertheNo ratings yet
- POLY LA3T2 Mecanique MateriauxDocument165 pagesPOLY LA3T2 Mecanique MateriauxmicipsaNo ratings yet
- Projet CMS Khadijetou 2023Document54 pagesProjet CMS Khadijetou 2023203014No ratings yet
- Propagation Des Ondes SismiquesDocument19 pagesPropagation Des Ondes Sismiquesdjeddi mabrouk86% (7)
- These RojatDocument331 pagesThese RojatSARRNo ratings yet
- Exercice SDocument54 pagesExercice SFakoro DoumbiaNo ratings yet
- Mecaniques Des Roches.Document17 pagesMecaniques Des Roches.Oberdino TsobengNo ratings yet
- Mémoire de Fin D'étude de MastèreDocument150 pagesMémoire de Fin D'étude de MastèreAli Ben Mansour75% (4)
- Me Can I Quedes Fluid EsDocument210 pagesMe Can I Quedes Fluid EsRabah RabahNo ratings yet
- C4CONTRAINTESFINALBIS2020Final 1Document27 pagesC4CONTRAINTESFINALBIS2020Final 1Bigue SowNo ratings yet
- 6 Chap2 Endommagement MecaniqueDocument16 pages6 Chap2 Endommagement MecaniqueSchmetterling TraurigNo ratings yet
- Chapitre 2 - Contraintes Dans Le SolDocument8 pagesChapitre 2 - Contraintes Dans Le SolyouceftliNo ratings yet
- Exos SolutionsDocument4 pagesExos SolutionsLinda Toumi100% (4)
- Cours MMC GC L3A Ouagadougou 2021 2022Document80 pagesCours MMC GC L3A Ouagadougou 2021 2022YE Yavé JuniorNo ratings yet
- TP Flexion de Poutre & PhotoelasticiteDocument15 pagesTP Flexion de Poutre & PhotoelasticiteSadokNo ratings yet
- Cours RDM 3Document82 pagesCours RDM 3Fateh MakhloufiNo ratings yet
- Element de RheologieDocument20 pagesElement de RheologiephanNo ratings yet
- Essais D'aptitude À La Mise en FormeDocument22 pagesEssais D'aptitude À La Mise en FormewalidnasriNo ratings yet
- MMC-Chapitre III ContrainteDocument19 pagesMMC-Chapitre III Contrainteyoussef aiNo ratings yet
- MDCDocument127 pagesMDCIlyes Benhacene100% (1)
- 2009 Benbelkacem GDocument235 pages2009 Benbelkacem GTELEBOUTIQUENo ratings yet
- MMCDocument2 pagesMMCmsila samiNo ratings yet