You might also like
- AN-237 Convolution: Digital Signal Processing: Literature Number: SNAA080Document10 pagesAN-237 Convolution: Digital Signal Processing: Literature Number: SNAA080Laraib TariqNo ratings yet
- Lecture 2Document33 pagesLecture 2marcelineparadzaiNo ratings yet
- Signals and Systems: DT e T X F XDocument6 pagesSignals and Systems: DT e T X F XBasim BrohiNo ratings yet
- AN-255 Power Spectrum Estimation: Literature Number: SNOA719Document30 pagesAN-255 Power Spectrum Estimation: Literature Number: SNOA719Qweku BlackNo ratings yet
- Performance Analysis of A Coherent Frequency Hopped Spread-Spectrum System With Multipath Channel Equalization in The Presence of JammingDocument14 pagesPerformance Analysis of A Coherent Frequency Hopped Spread-Spectrum System With Multipath Channel Equalization in The Presence of Jammingcompluuytthiex hmjjiuyytNo ratings yet
- Lab 3 - Fourier TransformDocument6 pagesLab 3 - Fourier TransformEd ItrNo ratings yet
- A Robust Baud Rate Estimator For Noncooperative Demodulation PDFDocument5 pagesA Robust Baud Rate Estimator For Noncooperative Demodulation PDFSorin GoldenbergNo ratings yet
- Data Transmission by Frequency-Division Multiplexing Using The Discrete Fourier TransformDocument7 pagesData Transmission by Frequency-Division Multiplexing Using The Discrete Fourier TransformDa NyNo ratings yet
- An Improved Image Fusion Algorithm Based On Wavelet DecompositionDocument7 pagesAn Improved Image Fusion Algorithm Based On Wavelet DecompositionRakesh VermaNo ratings yet
- Fundamentals of The Discrete Fourier Transform: XF Xte DTDocument8 pagesFundamentals of The Discrete Fourier Transform: XF Xte DTho-faNo ratings yet
- Experiment 2: Waveform Spectrum AnalysisDocument10 pagesExperiment 2: Waveform Spectrum AnalysisVenice Rome RoldanNo ratings yet
- FFTANALISIS-enDocument13 pagesFFTANALISIS-enRODRIGO SALVADOR MARTINEZ ORTIZNo ratings yet
- Operational Amplifier Gain Stability, Part 1: General System AnalysisDocument6 pagesOperational Amplifier Gain Stability, Part 1: General System AnalysisManjusha SreedharanNo ratings yet
- Seismic Data Processing and InterpretationDocument15 pagesSeismic Data Processing and InterpretationmustafaNo ratings yet
- Notes On Fourier Transforms: PHYS 332: Junior Physics Laboratory IIDocument6 pagesNotes On Fourier Transforms: PHYS 332: Junior Physics Laboratory IIFayazKhanPathanNo ratings yet
- BEKC 2433 Chapter 4 - Fourier TransformsDocument49 pagesBEKC 2433 Chapter 4 - Fourier TransformsAdam SaufiNo ratings yet
- Chapter 1-2 Digital Baseband Modulation TechniquesDocument25 pagesChapter 1-2 Digital Baseband Modulation Techniqueslu huangNo ratings yet
- firrm : Statistical of QuantizationDocument9 pagesfirrm : Statistical of QuantizationRaúl Díez GarcíaNo ratings yet
- Frequency Domain ProcessingDocument42 pagesFrequency Domain ProcessingInJune YeoNo ratings yet
- Reconstruction of Sampled Signals Using Zero-Order HoldDocument33 pagesReconstruction of Sampled Signals Using Zero-Order HoldashammoudaNo ratings yet
- Data Converters1Document30 pagesData Converters1Vidyanand PattarNo ratings yet
- Transmission Line FaultDocument6 pagesTransmission Line FaultAbhinav ShendageNo ratings yet
- Shock and Vibration Signal AnalysisDocument106 pagesShock and Vibration Signal AnalysisMichaelNo ratings yet
- Joint TX and RX IQ Imbalance Compensation of OFDM Transceiver in Mesh NetworkDocument5 pagesJoint TX and RX IQ Imbalance Compensation of OFDM Transceiver in Mesh NetworkSandeep SunkariNo ratings yet
- Total GMAT Math ExcerptDocument18 pagesTotal GMAT Math ExcerptvinothNo ratings yet
- Understanding The Discrete Fourier Transform: Signal ProcessingDocument4 pagesUnderstanding The Discrete Fourier Transform: Signal Processingchocobon_998078No ratings yet
- Analysis of Phase Noise Influence in MIMO OFDM SystemsDocument8 pagesAnalysis of Phase Noise Influence in MIMO OFDM SystemsherontNo ratings yet
- Jitter 1690318488Document46 pagesJitter 1690318488कुनाल सिंहNo ratings yet
- EE2/ISE2 Communications II Part I - Noise ModelingDocument61 pagesEE2/ISE2 Communications II Part I - Noise ModelingSergey VikhlyantsevNo ratings yet
- Fourier Transform Fundamentals ExplainedDocument15 pagesFourier Transform Fundamentals ExplainedJorge GuerreroNo ratings yet
- Voltage Tracking of A Multi-Input InterleavedDocument4 pagesVoltage Tracking of A Multi-Input InterleavedREYES APOLONIO CASTRO CORRALNo ratings yet
- Spread Spectrum Communications Using Chirp SignalsDocument5 pagesSpread Spectrum Communications Using Chirp SignalsArkaprava MajeeNo ratings yet
- Power Amplifier Modeling and Power Amplifier Predistortion in Ofdm SystemDocument10 pagesPower Amplifier Modeling and Power Amplifier Predistortion in Ofdm Systemtiblue.black.36No ratings yet
- EECE 442 - Chapter 2 - Fourier TransformDocument18 pagesEECE 442 - Chapter 2 - Fourier TransformKarim GhaddarNo ratings yet
- 07 - ART - Determination of Frequency Characteristics of High Voltage Dividers in Frequency DomainDocument4 pages07 - ART - Determination of Frequency Characteristics of High Voltage Dividers in Frequency DomainLove for gamesNo ratings yet
- عبدالخالق ماتلابDocument11 pagesعبدالخالق ماتلابعبدالمحسن علي ENo ratings yet
- Fourier TransformDocument3 pagesFourier TransformIndra SetyaNo ratings yet
- Statistical Theory of QuantizationDocument9 pagesStatistical Theory of QuantizationNRicalNo ratings yet
- Hilbert-Huang Transform and Its Applications in Engineering and Biomedical Signal AnalysisDocument8 pagesHilbert-Huang Transform and Its Applications in Engineering and Biomedical Signal AnalysisNithyaa SathishNo ratings yet
- Marple AnalyticDocument4 pagesMarple AnalyticsssskkkkllllNo ratings yet
- Wavelet Transform Approach To Distance: Protection of Transmission LinesDocument6 pagesWavelet Transform Approach To Distance: Protection of Transmission LinesthavaselvanNo ratings yet
- A Model of High Frequencies HF Channel Used To Design A Modem ofDocument5 pagesA Model of High Frequencies HF Channel Used To Design A Modem ofASM AAS ASSASNo ratings yet
- InTech-Hybrid Fiber AmplifierDocument22 pagesInTech-Hybrid Fiber AmplifierNono TGNo ratings yet
- Design of a PAM Telemetry Multiplexing SystemDocument6 pagesDesign of a PAM Telemetry Multiplexing SystemRana FaisalNo ratings yet
- DSP LecturesDocument154 pagesDSP LecturesSanjeev GhanghashNo ratings yet
- Removal of DCDocument7 pagesRemoval of DCsirisiri100No ratings yet
- Degradation of BER by Group Delay in Digital Phase ModulationDocument5 pagesDegradation of BER by Group Delay in Digital Phase ModulationarzeszutNo ratings yet
- Fourier Transform Properties and ExamplesDocument14 pagesFourier Transform Properties and ExamplesmfchinNo ratings yet
- Wavelets TransformationDocument33 pagesWavelets TransformationRajesh KbNo ratings yet
- Fast Fourier Transform ReportDocument19 pagesFast Fourier Transform ReportKarabo LetsholoNo ratings yet
- Performance Evaluation of PMU Using Modified Cooley-Tukey Algorithm Based On GDFTDocument6 pagesPerformance Evaluation of PMU Using Modified Cooley-Tukey Algorithm Based On GDFTABMOHENo ratings yet
- A Wavelet Based Differential Transformer ProtectionDocument8 pagesA Wavelet Based Differential Transformer ProtectionSyukNo ratings yet
- Introduction To WaveletDocument44 pagesIntroduction To WaveletSurya KalidindiNo ratings yet
- Properties of The CTFTDocument4 pagesProperties of The CTFTravichandra429No ratings yet
- Riley 1993Document7 pagesRiley 1993xmzbiskydemrfuvsjvNo ratings yet
- TURCOMAT-Denoising of MST RADAR Signal Using CWT and Overlapping Group ShrinkageDocument5 pagesTURCOMAT-Denoising of MST RADAR Signal Using CWT and Overlapping Group ShrinkageSureshbabu PNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- MOS Integrated Circuit DesignFrom EverandMOS Integrated Circuit DesignE. WolfendaleNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- American Cinematographer July 2017Document94 pagesAmerican Cinematographer July 2017Rohit MurarkaNo ratings yet
- First, BreakAllTheRules BIZDocument17 pagesFirst, BreakAllTheRules BIZRohit MurarkaNo ratings yet
- Judai LyricsDocument1 pageJudai LyricsRohit MurarkaNo ratings yet
- Tcs Campus Placement QuestionsDocument43 pagesTcs Campus Placement Questionsabhishek anandNo ratings yet
- BE SYLLABUS (5 To 8 SemElectro & Tele)Document22 pagesBE SYLLABUS (5 To 8 SemElectro & Tele)Rohit MurarkaNo ratings yet
- You Have Two ChoicesDocument59 pagesYou Have Two ChoicesRohit MurarkaNo ratings yet
- EE/COSC 2390 Homework Set 5 Solutions Spring 2004Document4 pagesEE/COSC 2390 Homework Set 5 Solutions Spring 2004Rohit MurarkaNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- DSP Unit V ObjectiveDocument4 pagesDSP Unit V Objectiveshashi dharNo ratings yet
- FFTDocument21 pagesFFT5ahtNo ratings yet
- 1KHW001489-En Instruction Manual ETL600R3 (June 2012, Annex Updated March 2014)Document486 pages1KHW001489-En Instruction Manual ETL600R3 (June 2012, Annex Updated March 2014)Carlos Sulca NeiraNo ratings yet
- Setup and Enjoy the AURORA Wireless Music SystemDocument18 pagesSetup and Enjoy the AURORA Wireless Music SystemelischuNo ratings yet
- 502 Series DC Power System: Netsure™Document8 pages502 Series DC Power System: Netsure™Sahand ArasNo ratings yet
- Eye Diagram PlotDocument28 pagesEye Diagram PlotAndrew JonesNo ratings yet
- Digital Image Processing Course OverviewDocument3 pagesDigital Image Processing Course OverviewyonaNo ratings yet
- Sampling, QuantizationDocument11 pagesSampling, QuantizationJJJJ TarkaNo ratings yet
- Personal Details: Peter James KootsookosDocument7 pagesPersonal Details: Peter James KootsookosPeter J. KootsookosNo ratings yet
- BR-101D Technical and Applications Literature Selector Guide and Cross ReferencesDocument132 pagesBR-101D Technical and Applications Literature Selector Guide and Cross ReferencesEdward YanezNo ratings yet
- CHAPTER 2 Digital Signal ProcessingDocument50 pagesCHAPTER 2 Digital Signal ProcessingBirhanu MelsNo ratings yet
- Human++ From Technology To Emerging Health Monitoring ConceptsDocument5 pagesHuman++ From Technology To Emerging Health Monitoring ConceptsJoshua Ayala SilvaNo ratings yet
- DSPDocument95 pagesDSPAbdulhafeez ShaikNo ratings yet
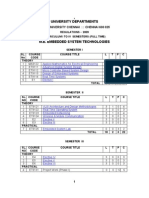
- Embedded System TechnologiesDocument37 pagesEmbedded System TechnologiesjayaprahasNo ratings yet
- Advanced Viewing R2 v0701 FseDocument21 pagesAdvanced Viewing R2 v0701 FseАndreyNo ratings yet
- Ece3099 Ipt Report Template 18becxxxxDocument29 pagesEce3099 Ipt Report Template 18becxxxxWINORLOSENo ratings yet
- DSP ch11 S6,7PDocument65 pagesDSP ch11 S6,7PBelaliaNo ratings yet
- Image Processing Using MatlabDocument66 pagesImage Processing Using MatlabSupratik Sarkar100% (1)
- Technical Guidelines For The Implementation of Minimum Security Measures For Digital Service ProvidersDocument57 pagesTechnical Guidelines For The Implementation of Minimum Security Measures For Digital Service Providershsaavedra1No ratings yet
- ECG Signal Processing Using Digital Signal Processing TechniquesDocument5 pagesECG Signal Processing Using Digital Signal Processing Techniqueslokesh patilNo ratings yet
- Image Compression Using Block Truncation CodingDocument5 pagesImage Compression Using Block Truncation CodingCyberJournals MultidisciplinaryNo ratings yet
- Vedic Maths in Digital Signal ProcessingDocument6 pagesVedic Maths in Digital Signal ProcessingSwanand RaikarNo ratings yet
- F 0276624Document4 pagesF 0276624Flávio SantosNo ratings yet
- M.Tech. PED Course Book for 2020-21Document53 pagesM.Tech. PED Course Book for 2020-21ramakant yadavNo ratings yet
- Edge Detection: Computer VisionDocument26 pagesEdge Detection: Computer VisionHema ChinnaNo ratings yet
- A Fast and Improved Image Compression Technique Using Huffman CodingDocument5 pagesA Fast and Improved Image Compression Technique Using Huffman CodingmanishNo ratings yet
- Design and Experimental Evaluation of A Time-Interleaved ADC Calibration Algorithm For Application in High-Speed Communication SystemsDocument12 pagesDesign and Experimental Evaluation of A Time-Interleaved ADC Calibration Algorithm For Application in High-Speed Communication SystemsRahul ShandilyaNo ratings yet
- T-61.246 Digital Signal Processing and Filtering T-61.246 Digitaalinen Signaalink Asittely Ja Suodatus Description of Example ProblemsDocument35 pagesT-61.246 Digital Signal Processing and Filtering T-61.246 Digitaalinen Signaalink Asittely Ja Suodatus Description of Example ProblemsDoğukan TuranNo ratings yet
- 1 for - w - ≤ 6 0 for 6 ≤ -: H e e, 0≤w≤ π π w≤πDocument3 pages1 for - w - ≤ 6 0 for 6 ≤ -: H e e, 0≤w≤ π π w≤πAnonymous Ndsvh2soNo ratings yet
- MCM33/EV experiment board teaches baseband transmission techniquesDocument1 pageMCM33/EV experiment board teaches baseband transmission techniqueslusoegyi 1919No ratings yet