Professional Documents
Culture Documents
Controlul Vibratiilor-Manuscris
Uploaded by
LukianhOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Controlul Vibratiilor-Manuscris
Uploaded by
LukianhCopyright:
Available Formats
Barbu DRGAN
CONTROLUL
VIBRAIILOR I ZGOMOTULUI
EDITURA GH. ASACHIIAI
Prof. dr.ing. Barbu DRGAN
CONTROLUL
VIBRAIILOR I ZGOMOTULUI
Editura GH. ASACHIIAI
2003
Editura Gh. Asachi
Universitatea Tehnic Iai
Bd. D. Mangeron, nr. 67,
6600- Iai, Romnia
Tel: 0232-23 13 43
FAX: 0232-21 42 90
Refereni tiinifici:
Prof. dr. ing. Spiridon CREU
Prof. dr. ing. Liviu HOSTIUC
Universitatea Tehnic Gh. Asachi Iai
Director editur:
Prof. dr. ing. Mihai VOICU
Redactor:
Prof. dr. ing. Georgeta ANICULESEI
Tehnoredactare computerizat:
Prof. dr. ing. Barbu DRGAN
Editarea s-a fcut cu finanare din Grant CNCSIS,
Contract 40222/2003, Tema 8, Cod 813
Descrierea CIP a Bibliotecii Naionale a Romniei
DRGAN, BARBU
Controlul vibraiilor i zgomotului
Dragan Barbu-Iai: Editura Gheorghe Asachi, 2003
p.291; 1724
ISBN
PREFA
Direciile actuale n dezvoltarea construciei de maini pe plan mondial i n
tar sunt orientate spre producerea de maini complexe, de nalt tehnicitate i
productivitate, ceea ce a determinat o cretere important a puterii i a vitezelor de
lucru. Aceste modificri au ridicat ns numeroase probleme asupra comportrii
vibroacustice a mainilor respective, n legtur i cu elaborarea unor soluii eficiente
de reducere, combatere i control a zgomotului i vibraiilor.
Vibraiile i zgomotele generate de maini sunt rezultatul a dou tendine
actuale ale dezvoltrii tehnologice:
creterea puternic a puterilor i turaiilor de lucru ale mainilor, pentru
mrirea productivitii;
realizarea unor maini de greutate redus, dar cu rigiditate relativ mare (pentru
reducerea consumului de material), deci cu frecvene proprii ridicate, folosirea
unor tehnologii de asamblare care duc la micorarea amortizrii structurale i
deci la creterea rspunsului la rezonan.
Pentru reducerea zgomotului i vibraiilor la maini exist patru direcii
principale:
identificarea surselor perturbatoare importante i atenuarea sau izolarea
acestora direct la surs, sau modificarea frecvenei acestora, n vederea
reducerii efectului sau evitarea rezonaelor structurale;
reproiectarea mainilor pentru evitarea rezonanelor, prin modificarea
amplasrii formei i dimensiunilor elementelor componente, urmrind alegerea
corect a rigiditii i o distribuie convenabil a maselor;
alegerea unor materiale avnd capacitate ridicat de disipare a energiei de
vibraie;
controlul activ al vibraiilor i zgomotului.
Rezolvarea acestor probleme necesit cunoaterea caracteristicilor dinamice ale
materialelor i structurilor, pe baza crora se poate realiza modelul teoretic pentru
studiul comportrii dinamice a mainilor. Studiul vibroacustic a mainilor i utilajelor
este impus de:
necesitatea obinerii unor maini silenioase, ntruct criteriul vibroacustic,
alturi de criteriile de precizie i fiabilitate reprezint din ce n ce mai mult un
criteriu de calitate i performan;
necesitatea stabilirii posibilitilor de diagnosticare a defectelor care apar n
procesul de fabricaie i exploatare, prin analiza caracteristicilor zgomotului i
vibraiilor, deoarece dezvoltarea tehnicii de msurare i analiz a vibraiilor i
zgomotului a creat posibilitatea realizrii unui control eficient, precis i rapid a
comportrii dinamice a mainilor, deci de stabilire a cauzelor determinate;
dezvoltarea i optimizarea unor sisteme eficiente pentru controlul activ al
vibraiilor i zgomotului.
Lucrrile numeroase prezentate n literatura de specialitate, au abordat
problema complex a combaterii zgomotului i vibraiilor mainilor att teoretic, ct
i experimental, analiznd minuios multitudinea de factori care determin
comportarea vibroacustic a acestora.
Performanele dinamice ale sistemelor mecanice, n timpul funcionrii, pot fi
mbuntite prin alegerea adecvat a regimurilor de lucru, prin adoptarea unei
construcii optime, din punct de vedere al rezervei de stabilitate sau prin aplicarea
unor msuri constructive sau de control activ.
n ultimii ani, se manifest o tendin de cretere a calitii i fiabilitii
mainilor, prin utilizarea unor sisteme senzoriale complexe, care au funcii de
monitorizare, diagnostic i control activ.
Utilizarea sistemelor pentru controlul activ al vibraiilor este recomandabil
att pentru simplitatea posibil a schemei de comand, ct i pentru eficiena
procesului de comand.
Controlul vibroacustic al mainilor complexe poate fi realizat n timpul
funcionrii n urmtoarele scopuri :
pentru evitarea comandat sau automat a situaiilor extreme, care pot
conduce la avarii;
pentru organizarea reparaiilor preventive cu ntreruperi minime;
pentru reducerea rspunsului la vibraii, pentru suprimarea instabilitii
structurale sau pentru combaterea vibraiilor i zgomotului produs n
funcionare de maini, prin utilizarea controlului activ al vibraiilor;
pentru perfecionarea i optimizarea proiectrii mainilor i organelor de
maini.
Identificarea sistemelor mecanice constituie o etap obligatorie n proiectarea
sistemelor mecanice, ceea ce implic o cunoatere suficient de precis a modelelor
sistemice asociate proceselor vibratorii din sistemele mecanice.
Tendina actual de mbuntire a performanelor de funcionare ale mainilor
a condus la o cretere deosebit a importanei modelrii matematice i simulrii pe
calculator a fenomenelor dinamice ale sistemelor mecanice, cu o dezvoltare
accentuat n special n domeniul vibroacustic.
Dezvoltarea tehnicii de msurare i analiz a vibraiilor, ca i dezvoltarea
tehnicilor de achiziie i procesare a semnalelor au permis importante perfecionri
ale sistemelor de control vibroacustic.
Achiziia datelor numerice sau analogice, cu ajutorul plcilor de achiziie, a
permis prelucrarea i analiza acestora prin intermediul limbajelor de progamare,
permind crearea sau simularea unor sisteme de control, diagnosticare i
monitorizare virtuale, care pot fi uor transformate i adaptate unor condiii
particulare.
Sistemele de msurare i analiz cu instrumente virtuale au performane net
superioare fa de instrumentele analogice sau digitale (flexibilitate, reutilizare,
reconfigurare) i preuri sczute.
Noile echipamente de control vibroacustic, n timp real, au permis
implementarea la scar industrial a sistemelor de control, diagnosticare i
monitorizare vibroacustic a mainilor, fiind aplicate eficient la instalaii industriale
moderne, maini unelte, roboi industriali etc.
Controlul prin vibraii este preferat, cu rare excepii, controlului prin
zgomot, care este prea mult afectat de sursele de zgomot din mediul ambiant,
solicitnd fie metode i aparatur special (metoda intensitii acustice), fie
condiii speciale de msurare (camer anecoid).
Lucrarea, elaborat n apte capitole, abordeaz aspecte de sintez ntr-un vast
domeniu interdisciplinar.
Prezentarea introductiv i sintetic a caracteristicilor vibraiilor i zgomotului
din capitolul I este urmat n capitolul II de o prezentare ampl a teoriei liniare a
vibraiilor n sistemele elastice cu unul sau mai multe grade de libertate, care
constituie fondul comun, clasic, al tuturor crilor de vibraii. n finalul acestui capitol
sunt prezentate noiuni introductive n studiul vibraiilor neliniare, al ocurilor i al
vibraiilor aleatoare.
Capitolul III este consacrat metodelor i tehnicilor de msurare a semnalului
vibroacustic, punndu-se accent pe metodele moderne de procesare digital a
semnalului i pe instrumentaia virtual de msurare, analiz, control i diagnosticare
vibroacustic.
n capitolul IV sunt prezentate principalele metode de control vibroacustic,
precum i normele privind nivele admisibile de vibraii i zgomot.
ntr-un capitol special sunt abordate problemele fundamentale ale controlului
activ al vibraiilor i zgomotului.
n capitolul VI sunt prezentate principalele surse de vibraii i zgomot n
funcionarea mainilor, precum i metodele de diagnosticare i monitorizare prin
vibraii i zgomot a strii de funcionare, prezentndu-se i o serie de exemple
concrete de diagnosticare vibroacustic a funcionrii organelor de maini (roi
dinate, rulmeni, lagre de alunecare etc.) i a mainilor (maini unelte, motoare,
ventilatoare, instalaii hidraulice etc.).
Ultimul capitol al lucrrii prezint problemele fundamentale ale izolrii
vibroacustice a sistemelor mecanice. n lucrare sunt evideniate cele mai importante
posibiliti de mbuntire a comportrii vibroacustice a mainilor prin proiectare de
material, geometric i tehnologic.
Lucrarea urmrete formarea i dezvoltarea unei gndiri inginereti, o iniiere
n cercetarea tiinific i tehnic din domeniul vibroacustic.
Pentru a fi ct mai eficient n procesul de formare a specialitilor din
domeniul vibroacustic, lucrarea este conceput s mbine armonios scopul formativ
cu cel informativ, coninnd cele mai importante capitole clasice de vibraii.
n abordarea teoretic a problemelor de control vibroacustic s-au cutat
fundamentri teoretice simplificate, pentru ca expunerea s fie precis i clar, n
scopul de a uura nelegerea laturilor teoretice i practice.
Din imensul volum de cunotine existent n domeniul vibroacustic, s-a fcut o
selecie riguroas i atent, s-a ordonat i sistematizat materialul, astfel nct studenii
s se poat orienta i n soluionarea altor probleme, dect cele tratate n lucrare, cu
care vor fi confruntai n activitatea profesional.
Lucrarea este adresat studenilor de la facultile cu profil mecanic, care au n
planul de nvmnt discipline din domeniul vibroacustic, fiind util i specialitilor
care doresc s abordeze probleme de vibraii i zgomot la maini i utilaje.
Autorul
CUPRINS
1. CARACTERISTICILE VIBRAIILOR I ZGOMOTULUI ....13
1.1.Consideraii generale .13
1.2.Clasificarea vibraiilor ...14
1.3.Elemente caracteristice ale sistemelor elastice........................................15
1.4.Mrimi care descriu forma de und a vibraiilor.....16
1.5.Caracteristicile fizice ale zgomotului.18
1.6.Propagarea undelor acustice n corpurile solide.........................................21
1.7.Clasificarea surselor sonore........................................................................21
2. RSPUNSUL SISTEMELOR MECANICE LA VIBRAII ...... 23
2.1.Vibraii libere n sisteme liniare cu un grade de libertate ........................23
2.1.1.Vibraii libere neamortizate ..........................................................23
2.1.2.Vibraii torsionale........................................................................24
2.1.3.Vibraii de ncovoiere...................................................................24
2.1.4.Constante elastice...........................................................................25
2.2.Vibraii libere amortizate............................................................................26
2.2.1.Vibraii n sisteme cu amortizare vscoas....................................27
2.2.2. Vibraii n sisteme cu amortizare uscat.......................................29
2.3. Vibraii forate............................................................................................30
2.3.1. Vibraii forate neamortizate datorit unei excitaii armonice......30
2.3.2. Excitaia prin micare aplicat suportului,
n sisteme neamortizate.................................................................32
2.3.3. Vibraii forate cu amortizare vscoas, datorit unei excitaii
armonice.......................................................................................33
2.3.4.Excitaia prin for centrifug n sistem cu amortizare vscoas..35
2.3.5.Transmisibilitate.............................................................................35
2.3.6. Energii la vibraii forate cu amortizare vscoas.........................37
2.3.7. Turaia critic a arborilor..............................................................37
2.4. Vibraii forate amortizate produse de o
excitaie periodic nearmonic..................................................................38
2.5. Vibraii in sisteme cu n grade de libertate..........................................40
2.5.1. Vibraii libere neamortizate n sisteme cu dou grade de
libertate........................................................................................41
2.5.2. Vibraii libere neamortizate n sisteme cu n grade de libertate....42
2.5.3. Determinarea ecuaiilor difereniale ale vibraiilor sistemelor
cu n grade de libertate folosind ecuaiile lui Lagrange...............44
2.5.4. Vibraii amortizate n sisteme cu n grade de libertate..................45
2.5.5. Vibraii forate cu amortizare vscoas n sisteme cu n grade de
libertate........................................................................................49
2.5.6. Vibraii de rsucire la angrenaje...................................................50
2.6. Metode aproximative pentru studiul vibraiilor sistemelor cu n de
grade de libertate........................................................................................51
2.6.1. Metoda Rayleigh...........................................................................51
2.6.2. Metoda Holzer..............................................................................53
2.6.3. Metoda matricelor de transfer.......................................................56
2.7. Vibraiile sistemelor continue..................................................................58
2.7.1. Vibraiile longitudinale ale barelor drepte....................................59
2.7.2. Vibraiile transversale ale barelor drepte..................................62
2.8. Metode aproximative pentru studiul vibraiilor sistemelor continue.........65
2.8.1. Metoda Rayleigh...........................................................................66
2.8.2. Metoda Ritz...................................................................................67
2.9. Vibraia transversal a barelor cu mase ataate..........................................68
2.10. Vibraii neliniare.......................................................................................71
2.10.1. Neliniariti n sisteme elastice...................................................72
2.10.2. Fenomene caracteristice vibraiilor neliniare..............................75
2.10.3. Metode pentru studiul vibraiilor neliniare.................................77
2.11. Metode aproximative pentru studiul vibraiilor neliniare........................79
2.11.1. Metoda perturbaiei.....................................................................79
4.11.2. Metoda iteraiei...........................................................................81
4.11.3. Metoda balanei energetice.........................................................82
2.12. Vibraii forate cu amortizare neliniar....................................................83
2.13. Vibraii autoexcitate.................................................................................84
2.14. Vibraii aleatoare......................................................................................86
2.15. ocuri i micri tranzitorii......................................................................88
2.16. Identificarea caracteristicilor dinamice ale sistemelor mecanice.............90
3. METODE SI TEHNICI DE MSURARE I ANALIZ A SEMNALULUI
VIBROACUSTIC...................................................................................................93
3.1. Scheme generale pentru msurarea i analiza semnalului vibroacustic....93
3.2. Metode de analiz a semnalului vibroacustic.............................................96
3.2.1. Analiza n domeniul frecven......................................................96
3.2.2. Analiza n domeniul timp..............................................................98
3.2.3. Analiza n domeniul amplitudine..................................................98
3.2.4. Analiza prin funcia de autocorelaie............................................99
3.2.5. Analiza Cepstrum........................................................................100
3.2.6. Funcia de rspuns n frecven...................................................102
3.2.7. Metoda analizei modale..............................................................102
3.3. Tehnica de analiz n frecven a semnalului vibroacustic......................105
3.3.1. Analizoare analogice...................................................................106
3.3.2.Analizorul cu filtre discrete..........................................................108
3.3.3. Analizorul cu filtru acordabil......................................................108
3.3.4. Analizorul paralel n timp real.....................................................108
3.3.5. Analizorul cu compresia timpului...............................................109
3.3.6. Analizorul cu filtre numerice.......................................................109
3.3.7. Analizorul FFT............................................................................109
3.3.8. Analiza Zoom FFT.....................................................................112
3.4. Instrumentaia virtual pentru msurarea i analiza
semnalului vibroacustic............................................................................112
3.4.1. Consideraii generale...................................................................112
3.4.2. Prelucrarea numeric a semnalelor vibroacustice.......................113
3.4.3. Plci de achiziie.........................................................................117
3.4.4. Limbajul de programare LabVIEW...........................................118
3.4.5. Structura aplicaiilor LabVIEW.................................................119
3.5. Filtrarea digital a semnalului vibroacustic.............................................120
3.5.1. Generaliti.................................................................................120
3.5.2. Filtre cu rspuns infinit la impuls...............................................121
3.5.3. Filtre IRI de tip cascad..............................................................122
3.5.4. Filtre Butterworth.......................................................................123
3.5.5. Filtre Chebyshev.........................................................................123
3.5.6. Filtre Chebyshev II sau filtre Chebyshev inverse.......................124
4.CONTROLUL VIBROACUSTIC AL SISTEMELOR MECANICE.............125
4.1. Controlul prin vibraii...............................................................................125
4.2.Controlul prin zgomot...............................................................................127
4.2.1.Condiii pentru msurarea zgomotului.........................................128
4.2.2.Camere anecoide..........................................................................130
4.2.3.Norme privind nivelurile admisibile de zgomot..........................131
4.3. Controlul prin intensitate acustic............................................................132
4.3.1. Introducere..................................................................................132
4.3.2. Msurarea puterii acustice cu ajutorul intensitii acustice........134
4.3.3. Identificarea surselor acustice.....................................................135
4.4. Controlul prin emisie acustic..................................................................136
4.4.1. Introducere..................................................................................136
4.4.2. Aparatura pentru controlul i diagnosticarea prin EA................137
4.4.3. Metode specifice de analiza a EA...............................................138
4.4.4. EA i deformaia plastic............................................................138
4.4.5. EA i ruperea materialelor..........................................................140
4.4.6. Controlul tehnologic prin EA......................................................140
4.4.7. Controlul prin EA al sistemelor mecanice.................................141
4.5. Controlul surselor sonore prin funcia de coeren..................................141
4.5.1. Introducere..................................................................................141
4.5.2. Consideraii teoretice..................................................................142
4.5.3. Cercetri experimentale..............................................................143
5. CONTROLUL ACTIV AL VIBRAIILOR I ZGOMOTULUI..................145
5.1.Consideraii generale.................................................................................145
5.2. Sisteme de control al vibraiilor...............................................................149
5.2.1. Consideraii generale..................................................................149
5.2.2. Clasificarea sistemelor de control...............................................151
5.2.3. Sisteme liniare discrete controlate..............................................153
5.2.4. Controlabilitate i observabilitate...............................................154
5.2.5. Controlul n bucl deschis.........................................................155
5.2.6. Controlul cu bucl nchis...........................................................156
5.2.7. Calculul matricelor de transfer prin metoda alocrii polilor.......160
5.2.8. Proiectarea observerului..............................................................161
5.2.9. Legi de control fundamentele.....................................................163
5.2.10. Abordarea modal a controlului sistemelor mecanice..............168
5.3. Strategii de control activ..........................................................................170
5.3.1. Introducere..................................................................................170
5.3.2. Controlul feedback......................................................................171
5.3.3. Controlul feedforward ................................................................172
5.4. Sisteme adaptive.......................................................................................173
5.4.1. Caracteristicile generale ale filtrelor adaptive............................173
5.4.2. Configuraii de sisteme adaptive.................................................174
5.4.3. Filtre Wiener cu rspuns finit la impuls......................................176
5.4.4. Sisteme adaptive cu semnale de prob........................................177
5.5.Alegerea actuatorilor pentru controlul activ al vibraiilor.........................178
5.5.1. Introducere..................................................................................178
5.5.2. Caracteristicile actuatorilor, necesare la izolarea activ a
vibraiilor....................................................................................179
5.6. Stabilitatea sistemelor de control activ....................................................182
5.7. Transmiterea puterii vibraiei n structurile mecanice i utilizarea ei
n controlul activ al vibraiilor..............................................................183
5.7.1. Introducere..................................................................................183
5.7.2. Puterea vibraiei transmise n cazul unei excitaii armonice......183
5.7.3.Evaluarea puterii transmise cu ajutorul unui semnal de eroare...184
5.7.4.Consideraii teoretice...................................................................185
5.7.5.Cercetri experimentale...............................................................187
5.8. Controlul activ al vibraiilor la sistemul cu dou grade de libertate........189
5.8.1. Determinarea forei pentru controlul activ din condiia ca
deplasarea s fie nul.................................................................190
5.8.2. Determinarea forei pentru controlul activ, din condiia
ca puterea vibraiei transmise s fie minim..............................191
5.8.3. Analiza eficienei controlului activ.............................................194
5.9. Controlul activ al transmiterii puterii vibraiei ntr-o bar.......................197
5.9.1. Modelul teoretic..........................................................................197
5.9.2. Identificarea sistemului...............................................................201
5.9.3. Determinarea forelor de control optime.....................................201
5.9.4. Izolarea pasiv pentru o excitaie simultan for i moment.....203
5.10.Controlul activ al vibraiilor generate de angrenaje, modulate n
amplitudine i/sau frecven....................................................................206
5.10.1.Consideraii generale................................................................. 206
5.10.2. Cercetri teoretice.....................................................................209
5.10.3. Poziionarea traductorului.........................................................212
5.11. Controlul activ al vibraiilor la angrenaje cu ajutorul unei
configurri speciale a traductorilor i a actuatorilor...............................213
5.11.1. Modelul teoretic pentru determinarea
forelor secundare de control....................................................213
5.11.2. Configurarea traductorilor i actuatorilor................................217
5.12. Absorbitorul dinamic activ de vibraii...................................................219
5.12.1. Introducere................................................................................219
5.12.2. Studiul teoretic al absorbitorului dinamic.................................220
5.12.3. Construcia absorbitorului dinamic adaptiv..............................222
5.13.Controlul activ al zgomotului la ventilatoarele axiale............................223
5.13.1.Introducere.................................................................................223
5.13.2.Determinarea experimental a radiaiei acustice
a ventilatoarelor axiale...............................................................224
5.13.3. Sistemul de control activ al zgomotului....................................225
5.13.4. Algoritmul de predicie pentru controlul activ al zgomotului...225
5.13.5. Algoritmul de predicie pentru semnalul zgomotului primar....227
5.13.6. Testarea sistemului de control activ..........................................228
6. DIAGNOSTICAREA I MONITORIZAREA VIBROACUSTIC
A SISTEMELOR MECANICE.........................................................................229
6.1. Diagnosticarea dezechilibrrii pieselor n micare de rotaie...................229
6.1.1. Planele de echilibrare..................................................................230
6.1.2. Echilibrarea rotorilor pe stand.....................................................231
6.1.3. Sistemul de msurare pentru echilibrare.....................................232
6.1.4. Echilibrarea n situ...................................................................233
6.1.5. Alegerea maselor de prob..........................................................236
6.1.6. Determinarea calitii echilibrrii...............................................237
6.2. Diagnosticarea transmisiilor prin roi dinate...........................................239
6.2.1. Analiza n frecven a semnalului vibroacustic
generat de angrenaje...................................................................240
6.2.2. Frecvene proprii critice la angrenaje..........................................242
6.2.3. Diagnosticarea vibroacustic la cutiile de viteze
cu roi dinate cu ajutorul analizei CEPSTRUM........................243
6.3. Diagnosticarea rulmenilor.......................................................................247
6.3.1. Consideraii generale...................................................................247
6.3.2. Diagnosticarea pentru studiul fenomenelor dinamice................247
6.3.3. Diagnosticarea rulmenilor n fluxul tehnologic.........................250
6.3.4. Diagnosticarea rulmenilor n funcionare..................................251
6.4. Diagnosticarea lagarelor cu alunecare......................................................253
6.5. Diagnosticarea transmisiilor prin lan......................................................253
6.6. Diagnosticarea transmisiilor prin curele..................................................254
6.7. Diagnosticarea transmisiilor prin came....................................................255
6.8. Diagnosticarea mainilor electrice rotative..............................................255
6.9. Diagnosticarea transformatoarelor...........................................................257
6.10. Diagnosticarea ventilatoarelor................................................................257
6.11. Diagnosticarea motoarelor cu ardere intern..........................................262
6.12. Diagnosticarea mainilor unelte.............................................................264
6.12.1. Surse de vibraii i zgomot la mainile-unelte..........................264
6.12.2. Msuri pentru mbuntirea comportrii dinamice
a mainilor unelte......................................................................266
6.12.3 Studiul comportrii dinamice a
mainilor-unelte prin teste de prelucrare....................................267
6.12.4.Identificare elementelor cu rigiditate dinamic
redus din structura mainilor unelte.......... ..........................268
6.12.5. Diagnosticarea vibroacustic a sculelor
n procesul de achiere..............................................................269
6.13. Diagnosticarea instalaiilor hidraulice industriale..................................270
6.13.1. Fenomene vibroacustice n instalaiile hidraulice industriale...270
6.13.2. Mecanisme de generare cu caracter aleator..............................273
6.13.3. Mecanisme de generare cu caracter periodic............................273
6.13.4. Zgomotul hidraulic asociat micrii organelor de maini.........274
6.14. Monitorizarea prin vibraii.....................................................................275
7. IZOLAREA VIBROACUSTIC A SISTEMELOR MECANICE................278
7.1. Consideraii generale......................................................................278
7.2. Izolarea acustic prin carcasare......................................................279
7.3. Izolarea antivibratorie....................................................................280
7.4. Structuri i materiale folosite pentru izolarea vibraiilor...............282
7.5. Izolarea vibraiilor cu ajutorul straturilor amortizoare...................284
7.6. Calculul izolrii cu covoare de cauciuc.........................................284
BIBLIOGRAFIE...............................................................................................286
13
1
CARACTERISTICILE VIBRAIILOR I ZGOMOTULUI
1.1. Consideraii generale
Un sistem mecanic se poate gsi n mod obinuit n repaus sau n
micare de regim, stri numite de referin. Vibraiile sunt micri alternative
efectuate de sistemul mecanic n raport cu starea de referin, fiind provocate
de fore perturbatoare (numite excitaii) ale cror mrimi, direcii sau puncte de
aplicaie variaz n timp. Din punct de vedere energetic, vibraia sistemului este o
schimbare periodic a energiei cinetice n potenial.
Studiul micrilor vibratorii, n raport cu strile de referin, se efectueaz n
general cu ajutorul unor parametri geometrici independeni. Determinarea acestor
parametri nseamn determinarea rspunsului sistemului mecanic la excitaia dat.
Rspunsul este condiionat att de parametrii excitaiei ct i de caracteristicile
mecanice ale sistemului.
n abordarea teoretic a problemei, prima etap este schematizarea sistemului
i stabilirea modelului, care, ideal ar trebui s reprezinte fidel sistemul fizic real, ceea
ce n majoritatea cazurilor necesit realizarea unui model complicat. Trecerea de la
un model matematic simplu, la altul mai complicat, determin o cretere a volumului
de calcul, mai accelerat dect mbuntirea preciziei rezultatelor, de o mare
importan fiind deci stabilirea de la caz la caz a modelului optim.
O a doua etap n tratarea teoretic const n stabilirea excitaiilor modelului
care de asemenea presupune introducerea de ipoteze simplificatoare n raport cu
excitaia sistemului real.
A treia etap presupune scrierea ecuaiilor difereniale de echilibru dinamic,
prin integrarea crora (folosind metode aproximative sau exacte) se obin parametrii
micrii vibratorii, deci se determin rspunsul sistemului mecanic.
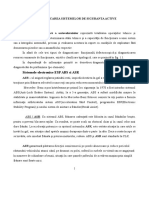
Pe baza analizei rspunsului sistemului se obin concluziile necesare.
n figura 1.1. este prezentat schema logic pentru studiul vibraiilor sistemelor
mecanice.
Fig.1.1.
SISTEM ELASTIC
REAL
EXCITAIA REAL
A SISTEMULUI
MODELUL
SISTEMULUI
EXCITAIA
MODELULUI
ECUAIILE
DIFERENIALE
METODE EXACTE
METODE APROXIMATIVE
RSPUNSUL
SISTEMULUI
CONCLUZII
14
Studiile experimentale se impun din urmtoarele motive:
n primul rnd nu toate sistemele pot fi tratate pe baza unui model matematic
rezonabil;
n al doilea rnd, dac acest studiu s-a fcut, studiile experimentale sunt
necesare pentru verificarea ipotezelor simplificatoare introduse.
1.2. Clasificarea vibraiilor
Vibraiile mecanice se pot clasifica dup urmtoarele criterii:
a) Dup natura sistemului.
vibraii liniare - care se produc n sisteme liniare, la care rspunsul este
proporional cu excitaia; la aceste sisteme ecuaiile difereniale ale micrii
sunt liniare cu coeficieni constani. Fenomenele din sistemele liniare pot fi
studiate pe baza principiului suprapunerii efectelor.
vibraii neliniare - care se produc n sisteme neliniare, la care caracteristica
elastic sau amortizarea este neliniar.
b) Dup natura forelor care acioneaz n timpul vibraiei.
Forele care intervin n timpul vibraiei sunt n general: fora elastic F
e
, fora
rezistent F
r
i fora perturbatoare (excitatoare) F
p
.
n funcie de valorile acestor fore, vibraiile pot fi:
Dup fora rezistent F
r
(fora rezistent este pozitiv dac acioneaz n sensul
micrii ):
F
r
= 0 vibraii neamortizate;
F
r
0 F
r
< 0 vibraii amortizate;
F
r
> 0 vibraii autontreinute sau autoexcitate.
Dup fora perturbatoare.
F
p
= 0 vibraii libere;
F
p
0 vibraii forate ;
F
p
cunoscut - vibraii deterministe;
F
p
aleatore - vibraii aleatore.
c) Dup numrul gradelor de libertate. Numrul de grade de libertate a unui
sistem elastic reprezint numrul de parametri scalari independeni, necesari pentru a
determina poziia elementelor sistemului.
Sistemele elastice pot fi:
cu numr finit de grade de libertate;
cu numr infinit de grade de libertate (sisteme continui).
d) Dup traiectoria pe care se deplaseaz punctele sistemului oscilant,
vibraiile pot fi de translaie sau de rotaie.
15
1.3. Elemente caracteristice ale sistemelor elastice
Un sistem elastic este determinat cnd se cunoate masa, proprietile elastice
i de amortizare ale elementelor componente. n fig. 1.2. este prezentat cel mai
simplu model de sistem elastic care cuprinde urmtoarele elemente caracteristice:
Fig.1.2.
b)Elementul elastic k poate avea caracteristica liniar sau neliniar. La
elementul elastic liniar, variaia lungimii este proporional cu fora care acioneaz
de-a lungul axei elementului:
F= k( x - u ) Dac: u = 0 F= kx
Constanta de proporionalitate k se numete constant elastic sau elasticitate i se
msoar n
m
N
. n cazul elementului elastic cu caracteristic neliniar: F= k x
n
Arcul ideal este considerat fr mas i n consecin fora aplicat la un capt
este egal i de sens opus cu cea aplicat la captul opus.
Elementele elastice nmagazineaz energie potenial de deformaie.
Repartiia proprietilor elastice n sistem poate fi discret sau continu, dup
cum repartiia maselor este discret sau continu.
c) Amortizorul c poate fi cu:
amortizare vscoas: - liniar;
- neliniar;
amortizare histeretic (amortizare structural, datorit frecrilor din mbinri,
reazeme) i care depinde numai de amplitudinea micrii;
amortizare coulombian, datorit forei de frecare coulombiene,care este
constant n decursul unei semiperioade;
amortizare oarecare.
La amortizorul vscos liniar, fora aplicat este proporional cu viteza relativ
dintre punctele sale de fixare.
Masa m care oscileaz reprezint un corp rigid, a crui
acceleraie
x& &
, n baza legii a doua a lui Newton, este
proporional cu fora rezultant F, aplicat asupra lui:
F=mx& &
n problemele de vibraii masa se msoar n kg.
Masa nmagazineaz energie cinetic.
n caz general masa sistemului elastic poate fi
concentrat n mai multe puncte sau poate fi distribuit
uniform sau dup o anumit lege, dat de geometria corpurilor
componente.
16
F ) u x ( c
a
& & = Dac u& = 0 F x c
a
& =
Constanta c se numete coeficient de amortizare i caracterizeaz amortizorul.
[c] =
m
Ns
Amortizorul ideal este considerat fr mas. n amortizor are loc disiparea
energiei prin transformarea acesteia n cldur. La amortizorul vscos neliniar:
F
n
a
cx =
Cunoscnd aceste caracteristici ale sistemului putem determina principala sa
caracteristic vibratorie: pulsaia proprie
o
, msurat n s
1
sau n rad/s.
ntre pulsaia proprie
o
[ s
1
] i frecvena proprie exist relaia: f
T
1
2
o
o
=
=
Principalele mrimi care se urmresc n studiul vibraiilor sunt:
pulsaiile proprii, pentru a cunoate dac exist pericol de rezonan;
amplitudinile vibraiilor (deplasri, viteze, acceleraii) pentru a stabili dac sunt
duntoare sistemului oscilant sau mediului.
1.4. Mrimi care descriu forma de und a vibraiilor
Cea mai simpl form de vibraie periodic este micarea armonic,
reprezentat n domeniul timpului de o curb sinusoidal (fig. 1.3).
Vibraia mecanic armonic este definit complet atunci cnd se cunoate
frecvena, amplitudinea i faza.
Dac notm cu x(t) poziia instantanee a sistemului mecanic n raport cu
starea de referin, atunci legea de micare este dat matematic de ecuaia :
Fig.1.3.
( ) ) t sin( X t x
v
+ =
unde:
T
2
f 2
= = este pulsaia micrii, iar X
v
amplitudinea micrii .
x(t)
t
x
m
x
v
x
RMS
17
n cazul vibraiilor armonice, viteza i acceleraia micrii rezult de
asemenea armonice, cu aceeai pulsaie i caracterizeaz complet micarea
vibratorie.
Pentru a caracteriza micrile periodice nearmonice, se folosesc dou
mrimi medii, care in seama de desfurarea procesului vibratoriu, pe parcursul
unei perioade, definite prin relaiile:
a) Valoarea medie absolut (aritmetic) : dt x
T
1
x
T
o
m
=
b) Valoarea eficace sau rdcina medie ptratic:
= =
T
o
2
RMS ef
dt ) t ( x
T
1
x x
Valoarea medie aritmetic x
m
este mai puin folosit ntruct nu are o
semnificaie fizic deosebit. Cea mai utilizat mrime la msurarea vibraiilor este
valoarea eficace care este proporional cu puterea vibraiei.
Mrimea
T
o
2
dt ) t ( x este proporional cu energia acumulat ntr-o perioad.
Prin raportarea acesteia la valoarea perioadei se obine puterea medie
pentru o perioad.
n cazul vibraiilor armonice pot fi scrise relaiile:
m v ef
x
2 2
x
2
2
x
= =
Rezulta c la vibraia armonic este suficient s fie msurat oricare din
aceste mrimi, lucru care nu mai este valabil pentru vibraiile periodice
nearmonice. Pentru evalua forma micrii vibratorii periodice se utilizeaz
factorul de form F
f
i factorul de vrf F
v
, definii prin relaiile:
F
f
=
m
RMS
X
X
F
v
=
RMS
v
X
X
Efectul vibraiilor periodice nearmonice asupra sistemului mecanic poate fi
stabilit dac sunt cunoscui att parametrii definii anterior (perioada, amplitudinea,
factorul de form i vrf ), ct i coninutul n frecvene, care se determin cu
ajutorul analizei n frecvena (analiz spectral).
n baza teoremei lui Fourier, vibraiile periodice deterministe pot fi
reprezentate printr-o sum finit sau infinit de armonici, rezultate prin
dezvoltarea n serie Fourier a funciei respective.
x(t) = X
o
+ ) t n sin( X
n
1 n
n
+
=
Reprezentnd valorile amplitudinilor n domeniul frecven se obine
spectrul de frecven al micrii, care este deosebit de util n controlul
vibroacustic al sistemelor mecanice.
18
1.5. Caracteristicile fizice ale zgomotului
Vibraia acustic reprezint micarea particulelor unui mediu elastic de o parte
i de alta a unei poziii de echilibru. Sunetul este o vibraie acustic capabil s
produc o senzaie auditiv. Senzaia auditiv este provocat de vibraiile care au
frecvene cuprinse ntre 16Hz i 20000Hz, domeniu care delimiteaz grupul
vibraiilor sonore sau acustice.
Dup felul vibraiilor care le produc, sunetele pot fi mprite n:
Tonul muzical este un sunet produs de o singur vibraie sinusoidal;
Sunetul muzical este produs de o vibraie periodic mai complex, format
prin suprapunerea mai multor tonuri muzicale;
Zgomotul este un sunet de durat mare, determinat de vibraii care nu sunt
periodice. Din punct de vedere fiziologic, zgomotul se consider a fi orice sunet
suprtor.
Undele acustice sunt rezultatul perturbrii strii staionare a mediului gazos
ntr-un punct al spaiului.
Cmpul acustic reprezint o zon a unui mediu elastic, care se gsete n stare
de vibraie i n care se propag undele acustice.
Cmpul acustic liber este orice cmp acustic care nu este limitat de o
suprafa.
Viteza sunetului (c) reprezint viteza cu care se propag n spaiu perturbaia
produs de radiaia unei surse sonore. Viteza sunetului depinde de elasticitatea de
volum a mediului i de densitatea acestuia. Viteza de propagare a sunetului este mai
mare n solide dect n lichide i respectiv gaze.
Lungimea de und ( ) este distana dintre dou puncte succesive, n care au
loc concomitent comprimri sau dilatri.
f
c
= , unde c este viteza de deplasare a undei, iar f este frecvena acesteia.
Dac presiunea acustic descrie un ciclu complet ntr-un timp T, atunci =cT.
Presiunea acustic (p) reprezint valoarea medie efectiv a variaiei de
presiune, ntru-un punct dat al mediului. Presiunea acustic se msoar n Pa (N/m
2
).
Utilizarea unei scri liniare pentru exprimarea presiuni acustice este dificil,
att datorit domeniului dinamic foarte mare a valorii presiunii pe care o poarte
percepe i analiza urechea uman, ct i datorit rspunsului neliniar, logaritmic, al
urechii la stimulii exteriori. De aceea, practic, se utilizeaz nivelul de presiune
acustic dat de relaia:
o
2
o
2
p
p
lg 20
p
p
log 10 L = =
mrimea obinut fiind exprimat n decibeli.
Valoarea de referin Pa 20 p
o
= i reprezint limita de audibilitate pentru un
sunet cu frecvena de 1kHz.
19
Intensitatea acustic (I) reprezint fluxul de energie acustic care strbate
unitatea de suprafa, perpendicular pe direcia de propagarea a sunetului, n unitatea
de timp i este definit de relaia:
(
= = =
2
o
2
T
0
T
1
m
W
c
p
v p dt pv lim I
,
unde: p este presiune acustic, v este viteza undei plane,
o
este densitatea aerului n
stare de repaus iar c este viteza sunetului n aer, n starea de repaus.
ntruct, intensitatea acustic variaz n limite foarte largi, se utilizeaz
frecvent mrimea logaritmic, nivelul de intensitate acustic, definit prin relaia:
0
I
I
I
lg 10 L = [dB]
unde I este intensitatea acustic msurat, iar I
0
este valoarea de referin.
Pentru sunete care se propag n aer:
2
12
0
m
W
10 I
=
n cazul unor unde sonore, care se propag ntr-un cmp liber, intensitatea
acustic se poate calcula cu relaia:
c
p
I
2
= , unde produsul c se numete
impedana caracteristic a mediului. Rezult c intensitatea acustic se poate
determina n cmpul acustic liber prin intermediul presiunii acustice.
Puterea acustic (P) reprezint energia acustic total radiat de o surs
acustic n unitate de timp. Puterea acustic se calculeaz cu relaia:
=
S
n
] W [ ds I P
unde I
n
este intensitatea acustic iar n este direcia normal la elementul de suprafa
dS. Nivelul de putere acustic este dat de relaia:
] dB [
P
P
lg 10 L
o
P
=
, unde P
o
=10
12
[W].
Reflexia undelor sonore.
Att timp ct n calea undelor sonore nu este interpus nici un obstacol, sunetul
se propag numai prin unde progresive.
Fig. 1.4
Mediul 1
Mediul 2
I
i
I
t
I
r
1
c
1
2
c
2
Dac undele ntlnesc un obstacol, realizat dintr-un
alt mediu, obstacol prin care undele pot trece integral,
parial sau de loc (fig. 1.4), atunci la suprafaa de separare a
celor dou medii se produce fie o reflexie a undelor, o
refracie sau ambele concomitent.
n cazul reflexiei totale, ntreaga energie acustic se
reflect, iar n cazul refraciei totale, ntreaga energie
acustic incident trece n al doilea mediu.
20
Dac cele doua fenomene se produc simultan, o parte a energiei se reflect (I
r
),
iar o alt parte (I
t
) se propag n cel de-al doilea mediu.
Coeficientul de reflexie acustic este definit prin raportul dintre fluxul de
energie acustic a undelor reflectate i fluxul de energie acustic a undelor incidente,
pe suprafaa de separare a mediilor i se calculeaz cu relaia:
2
2 2 1 1
2 2 1 1
c c
c c
|
|
.
|
\
|
+
= I
r
= .I
i
unde
1
c
1
i
2
c
2
sunt impedanele caracteristice ale celor dou medii.
Coeficientul de transmisie este definit ca raportul dintre fluxul de energie
acustic a undelor transmise i fluxul de energie a undelor incidente pe suprafaa de
separare a mediilor i se calculeaz cu relaia:
( )
2
2 2 1 1
2 2 1 1
c c
c c 4
+
= I
r
= .I
i
Atenuarea sunetului n aer liber este cauzat pe de o parte de o mprtiere a
energiei prin divergen sferic i pe de alt parte de o absorbie a energiei n mediu.
Pe msur ce deprtarea de o surs sonor nedirecionat crete, energia
transportat de unde se distribuie pe suprafaa unei sfere din ce n ce mai mare.
Puterea de radiaie a sursei rmnnd aceiai, intensitatea acustic descrete
invers proporional cu ptratul distanei. Dac se noteaz cu I
1
i I
2
intensitile
acustice a dou puncte situate la distanele r
1
i r
2
de o surs sonor nedirecional
(r
1
< r
2
) se poate scrie:
2
2
2
1
1 2
2
2
2
1
2
1
r
r
I I
r
r
I
I
= =
Dac se calculeaz nivelul de intensitate acustic obinem:
1
2
1 2
r
r
lg 20 L L =
Rezult c atenuarea :
1
2
2 1
r
r
lg 20 L L L = =
Dac r
2
= 2r
1
L
1
= 6dB i deci la o dublare a distanei fa de surs, nivelul
presiunii acustice scade cu 6 dB.
Reverberaia reprezint persistena sau prelungirea sunetului ntr-o ncpere,
dup ncetarea emisiei sursei sonore. n practic, se consider c sunetul s-a atenuat
integral dac nivelul de presiune acustic a sczut cu 60dB.
Timpul necesar producerii acestei atenuri a nivelului de presiune acustic se
numete durat de reverberaie (T) i se exprim n secunde. Durata de reverberaie
este independent de puterea sursei sonore, dar depinde de dimensiunile geometrice
ale ncperii i de absorbia acustic din ncpere, fiind cu att mai mare cu ct
volumul ncperii este mai mare i cu ct absorbia corespunztoare este mai mic.
21
1.6. Propagarea undelor acustice n corpurile solide
n aer sau ntr-un gaz oarecare, sunetul nu se poate propaga dect sub form de
unde longitudinale. ntr-un mediu solid, sunetul se poate propaga printr-o diversitate
de unde (longitudinale, transversale, cvasilongitudinale, unde de suprafa).
Sunetele transmise prin mediile solide se mai numesc i sunete structurale.
Energia acustic pe care o transport undele n corpul solid este atenuat
datorit absorbiei energiei n mediu, datorit efectelor termice i a difuziei sunetului
pe suprafaa de separare a grunilor de material.
Absorbia sunetului este cu att mai mare cu ct frecvena sunetului este mai
mare i granulaia materialului este mai mare. Atenuarea sunetului este produs i de
discontinuitile de seciune.
Un alt mijloc de a obine o atenuare a undelor transmise ntr-un corp solid l
constituie mrirea masei corpului cu o mas adiional. Mrind masa corpului solid
prin care se propag undele de ncovoiere, atenuarea acestora va crete cu frecvena.
1.7.Clasificarea surselor sonore
Zgomotul ia natere ca urmare a vibraiei corpurilor. n funcie de natura
forelor care produc vibraia corpurilor, sursele sonore pot fi:
surse productoare de zgomot prin aciune mecanic (n aceast grup de
aciuni intrnd ciocnirea i frecarea);
surse productoare de zgomot prin aciune aerodinamic (n aceast grup fiind
cuprinse scurgerile laminare de fluid prin orificii sau scurgerile turbulente);
surse productoare de zgomot prin aciune electromagnetic;
surse productoare de zgomot prin aciune termic.
La acestea trebuie adugate i zgomotele care iau natere ca urmare a unei
explozii sau a unei descrcri electrice.
Zgomot produs prin ciocnire.
n urma aciunii unei fore creat de ciocnire, corpurile pot vibra cu toate
punctele n faz sau, n corpuri pot lua natere unde de ncovoiere.
Primul mod de vibrare are loc atunci cnd rigiditatea corpului este apreciabil,
n timp ce undele de ncovoiere se produc n cazul plcilor i barelor, ale cror
dimensiuni sunt mari, n raport cu lungimea de und a sunetului generat, iar
rigiditatea corpului este relativ sczut.
Frecvenele sunetului emis n urma unei aciuni prin oc, depind de frecvenele
proprii de vibraie ale corpurilor lovite, fiind independente de frecvena de repetare a
ocurilor. Caracteristicile zgomotului depind i de amortizarea intern a vibraiilor
celor dou corpuri care se ciocnesc.
n aceast categorie de surse sonore intr ciocanele obinuite i pneumatice,
mainile de tanat, angrenajele etc.
22
Zgomotul produs prin frecare.
Vibraiile corpului sunt produse n acest caz din cauza aciunii forelor de
frecare, care iau natere la micarea de translaie sau de rotaie a dou corpuri.
Intensitatea sunetului produs variaz cu forele i cuplurile de frecare, deci
depinde de coeficienii de frecare i reaciunile normale dintre corpurile n contact.
Prin urmare, cu ct suprafaa corpului are rugozitate mai mare, cu att
intensitatea zgomotului produs este mai mare.
Corpul pus n vibraie n urma frecrii, vibreaz cu frecvenele sale proprii,
care vor determina i spectrul zgomotului generat. i n cazul frecrii, natura
zgomotului depinde de amortizarea intern a vibraiilor corpurilor n micare.
Rularea roilor pe ine, prelucrarea materialelor prin achiere, rotirea axelor n
lagre, sunt cteva dintre operaiile la care se produc zgomote datorit frecrii.
Zgomotul aerodinamic.
Scurgerea unui fluid ntre dou suprafee rigide fixe (de exemplu refularea
aerului printr-o gur de ventilaie) precum i scurgerea fluidelor datorit micrii
relative a suprafeelor (de exemplu, rotirea elicei unui ventilator sau avion, a rotorului
unei maini) sunt cauze care produc zgomot de natur aerodinamic, denumit i
zgomot de siren.
n aceste cazuri, intensitatea zgomotului produs depinde de forma geometric a
conductelor sau a suprafeelor printre care se scurge fluidul, de viteza fluidului, de
debitul i de vscozitatea cinematic a acestuia. Dac zgomotul are aspectul unui
sunet produs de o siren, exist n spectrul de frecven o component predominant.
Dac scurgerea fluidului este turbulent, se produce un zgomot cu spectru
continuu.
Zgomotul magnetic.
Zgomotul magnetic este specific mainilor electrice (generatoare, motoare,
transformatoare) i se datoreaz forelor periodice care acioneaz n ntrefierul dintre
rotor i stator, forelor magnetomotoare datorit nfurrii statorului i rotorului.
Zgomotul magnetic este format dintr-un sunet fundamental, avnd frecvena
reelei electrice (50Hz) i o serie de armonici ale acestuia.
Zgomot produs prin aciune termic.
Zgomotul termic apare n timpul arderii, din cauza interaciunii dintre flacr
i gaz, care produce autooscilaii. n spectrul unui asemenea zgomot predomin
componentele de joas frecvent, sub 100Hz.
23
2
RSPUNSUL SISTEMELOR MECANICE LA VIBRAII
2.1.Vibraii libere n sisteme liniare cu un grad de libertate
Sistemele oscilante cu un singur grad de libertate sunt formate, n general,
dintr-o mas rigid, care execut o micare de translaie sau rotaie ce poate fi
determinat printr-un singur parametru i unul sau mai multe elemente elastice i
elemente de amortizare, legate de masa rigid i de un element de referin (care
poate fi fix ).
Sistemele oscilante cu un grad de libertate pot executa:
a) vibraii libere:
neamortizate;
amortizate.
b) vibraii forate:
neamortizate;
amortizate.
2.1.1.Vibraii libere neamortizate
Vibraiile libere neamortizate sunt vibraiile executate de un sistem oscilant,
care a fost scos din poziia de repaus, fiind lsat apoi s oscileze liber, cu frecvena
proprie. S considerm un sistem oscilant format dintr-o mas m i un arc de
constant elastic k (fig.2.1). Considernd originea sistemului n poziia de repaus a
masei m, putem scrie ecuaia diferenial a micrii oscilatorii, folosind principiul lui
d Alambert.
Fig. 2.1.
0 kx x m = + & &
0 x
m
k
x = + & &
Mrimea
m
k
0
= se numete pulsaia proprie a
sistemului oscilant. Rezult ecuaia diferenial:
0 x x
2
0
= + & & a crei soluie general este de forma:
) t sin( C t cos B t sin A x
0 0 0
+ = + =
unde: C=
2 2
B A + - este amplitudinea oscilaiei libere;
A
B
arctg = - faza la originea timpului.
24
Lund condiiile iniiale ale micrii (la t = 0): x = x
0
B = x
0
i
0
v x = & A =
0
0
v
Rezult legea de micare: x = x t sin
v
t cos
0
0
0
0 0
+
Vibraia liber neamortizat este o micare periodic armonic, avnd
perioada: T=
2
0
; ntruct : m =
P
g
s
0
g
P
kg
m
k
= = =
n care
k
P
s
= este sgeata static produs de greutatea P a sistemului.
2.1.2. Vibraii torsionale
n cazul vibraiilor torsionale ecuaia diferenial se obine din ecuaia
vibraiilor de translaie nlocuind:
Fig.2.2.
2.1.3.Vibraii de ncovoiere
Fie un arbore elastic de rigiditate EI ncrcat la mijloc cu o mas rigid m
(fig.2.3.). n repaus arborele are sgeata static:
Fig.2.3.
Ecuaia micrii vibratorii pe direcia y este:
k
J
m J - momentul de inerie masic fa de axa de
rotaie;
x - unghiul de rsucire.
J
k
0
= n care: [k] =
(
rad
m N
Ecuaia diferenial este: J 0 k = + & &
a crei soluie este: t sin t cos
0
0
0
0 0
+ =
&
EI 48
mgl
3
s
=
Dac scoatem masa din poziia de
echilibru, ea va ncepe s vibreze de-a
lungul axei y, cu pulsaia:
3
s
0
ml
EI 48 g
m
k
=
= =
25
t sin
y
+ t cos y = y
0
0
0
0 0
&
n cazul n care bara elastic, n vibraie torsional sau flexional, reprezint un
arbore de main, pulsaia proprie a vibraiilor torsionale sau flexionale se numete
pulsaie critic. Dac arborele se rotete cu o vitez unghilar:
30
n
= , egal cu
pulsaia proprie
o
, poate s produc rezonana, ceea ce poate determina creterea
amplitudinii vibraiilor.
2.1.4. Constante elastice
Prin definiie, constanta elastic a unui element elastic este egal cu fora care
produce o deformaie unitar a elementului elastic.
Deci constanta elastic se poate calcula scriind deformaia elementului elastic
i egalnd-o cu unitatea.
n continuare se dau constantele elastice pentru cteva elemente elastice:
Bar elastic prismatic solicitat la ntindere sau compresiune:
= 1
EA
Pl
= k =
l
EA P
=
m
N
Bar cilindric solicitat la rsucire: k =
l 32
Gd
4
Bar dreapt simplu rezemat, cu masa la mijlocul barei, aflat n vibraie
flexional: k =
3
l
EI 48
Bar ncastrat cu masa la captul liber: k =
3
l
EI 3
Arcul elicoidal: k =
n R 64
Gd
3
4
Masa rigid poate fi legat de elementul de referin prin mai multe elemente
elastice care se pot monta: - paralel (fig.2.4.);
-serie (fig.2.5.);
-mixt (fig.2.6.).
Montaj paralel
Fig.2.4.
Dac asupra ansamblului de arcuri se aplic fora F,
ea produce n ambele arcuri aceiai deformaie x, respectiv
forele elastice F
1
= k
1
x i F
2
= k
2
x
F = F
1
+ F
2
= k
1
x + k
2
x = ( k
1
+ k
2
)x = kx
Rezult: k = k
1
+ k
2
i n caz general: k =
=
n
1 i
i
k
26
Montaj n serie.
Fig.2.5.
Fig.2.6.
Fig.2.7.
2.2. Vibraii libere amortizate
n natur nu exist vibraii libere neamortizate, care s se menin la infinit cu
aceiai amplitudine. Din cauza frecrilor din sistemul oscilant, o parte a energiei de
vibraie se transform n cldur, ceea ce conduce la o reducere continu a
amplitudinii micrii. Se spune ca vibraiile libere se amortizeaz.
Amortizarea poate fi:
extern - atunci cnd frecrile au loc ntre elementele sistemului oscilant i
mediul nconjurtor (reazeme, aer, lichid amortizor);
intern - atunci cnd frecrile au loc n interiorul sistemului (mbinri,
Montaj mixt
K
1
=
3
K
1
+
2 1
K K
1
+
Deformaia total x este suma deformaiilor x
1
i x
2
produse de fora F n fiecare element elastic:
x =
k
F
= x
1
+ x
2
=
2 1
k
P
k
P
+
Rezult:
2 1
k
1
k
1
k
1
+ = ; i n caz general:
k
1
=
=
n
1 i
i
k
1
Aplicaie
Arcul elicoidal superior are z spire, iar arcul elicoidal
inferior are n-z spire (fig.2.7). S se determine numrul de spire
z ale arcului superior, n aa fel nct pulsaia proprie a
sistemului s fie minim.
Rezolvare
k = k
1
+ k
2
k
1
=
z R 64
Gd
3
4
; k
) z n ( R 64
Gd
3
4
2
=
k =
) z n ( z
n
R 64
Gd
3
4
;
) z n ( mz R 64
n Gd
3
4
o
=
Pentru :
2
n
z =
mn R 16
Gd
3
4
min o
=
27
material), fiind caracterizat de apariia unei bucle de histerezis n diagrama
efort deformaie, trasat pentru un ciclu complet de ncrcare - descrcare a
elementului elastic.
Pentru amortizarea extern, fora rezistent poate fi considerat egal cu:
fora de frecare vscoas, proporional cu viteza relativ dintre mediile n
micare;
fora de frecare uscat sau coulombian, constant i de semn neschimbat n
decursul unei semiperioade.
n continuare se vor prezenta principalele probleme legate de amortizarea
vibraiilor libere, la sistemele elastice cu amortizare extern.
2.2.1. Vibraii libere n sisteme cu amortizare vscoas
S considerm un sistem elastic n care exist un amortizor vscos avnd
coeficientul de amortizare c i care creeaz o for de frecare vscoas c x& de sens
opus vitezei, deci de acelai sens cu fora elastic (fig.2.8.).
Fig.2.8
0 = + 2 +
2
x x x
o
& & &
2 2
2 1
2 2
= 0 = + 2 +
o ; o
r r r
Felul micrii depinde de natura acestor rdcini.
Cazul I. Amortizare subcritic:
Dac:
cr o
c m . k c
m
k
m
c
= 2 < <
|
.
|
\
|
2
0 <
2
2 2
ecuaia caracteristic admite rdcini complex conjugate, micarea este oscilatorie
amortizat, amortizarea se numete subcritic.
Se noteaz:
2 2
o
2
= i se numete pseudopulsaie.
Rezult : = i r
2 ; 1
i soluia ecuaiei difereniale este:
( ) ) t sin( Ce t cos B t sin A e x
t t
+ = + =
Dac la t = 0 avem:
+
= =
o o
o
x v
A x x i
o o
x B v x = = &
Ecuaia diferenial a micrii masei m este:
0 = + + kx x c x m & & & / :m
0 = + + x
m
k
x
m
c
x & & &
Se noteaz:
m
c
= 2 - factorul de amortizare;
2
=
o
m
k
- ptratul pulsaiei proprii.
28
sau:
2
o o 2
o
x v
x C |
.
|
\
|
+
+ = respectiv:
o o
o
x v
x
tg
+
= i legea de micare este:
|
.
|
\
|
+
+
=
t cos x t sin
x v
e x
o
o o t
a crei reprezentare grafic este dat n fig. 2.9.
Fig.2.9.
Pseudopulsaia:
2 2
o
2
cr
2
o
2
2 2
o
1
c
c
1
m 2
c
m
k
=
|
|
.
|
\
|
=
|
.
|
\
|
= =
Raportul
cr
c
c
= se numete fraciune de amortizare critic.
2
o
1
2 2
T
=
se numete pseudoperioad.
Cazul II. Amortizare critic
Dac
cr
2
o
2
c c 0 = = , rdcinile ecuaiei caracteristice sunt reale i
egale, amortizarea este critic.
Fig.2.10
Cazul III. Amortizare supracritic
Se obine pentru
cr o
c c > 0 >
2 2
ecuaia caracteristic are soluii reale
i diferite:
2
o
2
2 ; 1
r =
Ecuaia micrii este de forma:
|
.
|
\
|
+ =
2
o
2 2
o
2
t t t
Be Ae e x
i reprezint o micare aperiodic, sistemul scos din poziia de referin tinde s
revin ncet la aceeai poziie.
= =
2 1
r r iar ecuaia micrii se
scrie: ( ) B At e x
t
+ =
i punnd condiiile iniiale obinem:
( ) | |
o o o
t
x t x v e x + + =
Micarea este aperiodic, sistemul scos din
poziia de referin revine ncet la aceeai poziie
(fig. 2.10).
29
2.2.2. Vibraii n sisteme cu amortizare uscat
n acest caz, sistemul oscilant se mic sub efectul forei elastice kx i al unei
fore rezistente de mrime constant R, de sens opus vitezei (fig.2.11).
Fig.2.11
Ecuaia diferenial a micrii este:
0 = + + kx
x
x
R x m
&
&
& & unde:
0 x , 1
0 x , 0
0 x , 1
x . sign
x
x
<
=
> +
= =
&
&
&
&
&
&
Micarea se poate studia pe semiperioade.
S considerm c masa a fost deplasat ntr-o poziie extrem x
o
i lsat s
oscileze ca urmare a forei din arc. n prima semiperioad, fora rezistent va fi de
semn opus vitezei v, deci dirijat spre axa x pozitiv, iar ecuaia micrii este:
0 = + kx R x m& &
Soluia general a ecuaiei este de forma:
R o o
t cos B t sin A x + + = n care:
m
k
o
= i
k
R
R
=
n semiperioada urmtoare, fora R i schimb semnul i deci ecuaia
diferenial va avea soluia:
R o o
t cos B t sin A x + =
Deci n caz general:
R o o
t cos B t sin A x + =
Constantele A i B se determin pentru fiecare semiperioad separat.
Pentru:
= =
= =
=
0 A 0 x
x B x x
0 t
R o o
&
La sfritul primei semiperioade, pentru = t
o
deplasarea este:
R o R
2 x B x + = + =
iar viteza este nul.
La sfritul semiperioadei urmtoare, amplitudinea scade iarai cu
R
2 i aa
mai departe. Micarea se poate reprezenta printr-o serie de sinusoide, cu amplitudini
ce scad n progresie aritmetic i ale cror axe sunt decalate cu
R
fa de axa
timpului (fig.2.12).
30
Fig.2.12
2.3. Vibraii forate
Vibraia forat reprezint micarea unui sistem oscilant ca rspuns la o
excitaie continu, a crei mrime variaz n timp.
Fig.2.13
n continuare vom trata cele mai uzuale cazuri de vibraii forate.
2.3.1. Vibraii forate neamortizate datorit unei excitaii armonice
Fig.2.14
Clasificarea
vibraiilor
forate
Dup amortizare
Fr amortizare
Cu amortizare
Vscoas
Uscat
Histeretic
Oarecare
Dup excitaie
Aleatoare
Determinist
Periodic
Impuls
Oarecare
Modelul sistemului oscilant este dat n fig.2.14.
Fora excitatoare are amplitudine F
o
i pulsaie ,
deci: F
(t)
= F
o
sin t
Ecuaia diferenial a micrii este:
t sin F kx x m
o
= + & &
mprind prin m obinem:
t sin
m
F
x
m
k
x
o
= + & &
Se noteaz:
m
k
o
=
2
i
m
F
q
o
=
31
Ecuaia devine: t sin q x x
o
= +
2
& &
Avem o ecuaie neomogen a crei soluie general este egal cu suma dintre soluia
general a ecuaiei omogene x
1
i o soluie particular a ecuaiei neomogene x
2
:
x = x
1
+ x
2
n care: x
1
= A sin
o
t + B cos
o
t
x
2
= C sin t + D cos t
Constantele C i D se determin punnd condiia ca soluia particular x
2
s
verifice ecuaia diferenial neomogen.
t sin D t cos C x =
2
&
t cos D t sin C x =
2 2
2
& &
- C
2
sin t - D
2
cos t +
0
2
C sin t +
0
2
D cos t = q sin t
sin t (- C
2
+
0
2
C) + cos t (- m D
2
+ D
0
2
) = q sin t
( )
( )
0 = 0 = +
= = +
2 2
2 2
2 2
D D
q
C q C
o
o
o
Deci, soluia general este:
x = A sin
o
t + B cos
o
t +
2 2
o
q
sin t
Constantele A i B se determin punnd condiiile iniiale:
t= 0
= 0 =
0 = 0 =
2 2
o o
q
A x
B x
&
i ecuaia micrii este: x =
|
|
.
|
\
|
2 2
t sin t sin
q
o
o o
Avem o vibraie nearmonic, rezultat din suprapunerea a dou micri armonice,
vibraia proprie de pulsaie
o
i vibraia forat cu pulsaia perturbtoare .
n general, datorit efectelor de amortizare, vibraia proprie dispare rapid i
rmne numai vibraia forat, n acest caz vibraia fiind armonic, cu frecvena forei
perturbatoare.
x = X
o
sin t = t sin
q
o
2 2
n care:
X
o
=
st o
o
o
o
o
o
o
o
o
X A
k
F
m
F
m
F
q
=
|
|
.
|
\
|
1
=
|
|
.
|
\
|
=
=
2 2
2
2 2 2 2
32
este amplitudinea vibraiei forate; X
st
=
k
F
o
este deformaia static a sistemului
oscilant sub aciunea valorii maxime F
o
a forei perturbatoare.
Mrimea adimensional A
o
=
2
|
|
.
|
\
|
1
1
o
se numete factor de amplificare i
arat de cte ori este mai mare deformaia dinamic a sistemului, datorit forei
perturbatoare, n raport cu deformaia static, datorit amplitudinii aceleiai fore.
Fig.2.15
2.3.2. Excitaia prin micare aplicat suportului, n sisteme neamortizate
Fig.2.16
Aplicaie. Un motor electric, avnd greutatea Q este montat la captul unui
suport format din doua grinzi paralele, ncastrate la cellalt capt (fig. 2.17).
Grinzile sunt confecionate din profile I de oel avnd modul de elasticitate
longitudinal E = 2,1 : 10
11
N/m
2
.
X
o
= X
st
.A
o
Dac reprezentm variaia lui A
o
n
funcie de raportul
o
obinem diagrama din
figura 2.15
Pentru: =
o o
A are loc
fenomenul de rezonan.
La rezonan amplitudinea crete continuu
cu timpul, devenind infinit numai la valoarea
infinit a timpului.
S considerm o excitaie armonic prin micare
aplicat suportului de forma:
u = u
o
sin t
Fora elastic va fi: F
e
= k(x - u)
iar ecuaia diferenial a micrii este:
( ) 0 u x k x m = + & &
t sin ku kx x m
o
= + & &
Dac se noteaz:
o o
ku F = rezult soluia general a
ecuaiei difereniale:
x = A sin
o
t + B cos
o
t +
2
o
o
1
u
|
|
.
|
\
|
sin t
33
Fig.2.17
b) La ce turaie se produce fenomenul de rezonan.
Se vor neglija greutile grinzilor i forele de amortizare.
Rezolvare.
Fora perturbatoare, pe vertical, datorit excentricitii este:
t sin e
g
P
F =
2
unde:
30
n
=
Ecuaia vibraiilor forate, pe direcie vertical, este:
t sin e
Q
P
x x
o
= +
2 2
& & unde:
st
o
f
g
= ;
) I 2 ( E 3
Ql
f
3
st
=
3
6
=
Ql
gEI
o
a e
Q
P
X
o
o
1
1
= |
.
|
\
|
+
Qa
Pe
1
gE 6
Ql
I
3
2
3
o
Ql
gEI 6
=
=
o
cr
30
n
2.3.3. Vibraii forate cu amortizare vscoas, datorit unei excitaii armonice
S considerm un sistem oscilant cu un grad de libertate, care are un amortizor
liniar, n paralel cu arcul (fig. 2.18).
Fig.2.18
soluiei particulare i are pulsaia a forei perturbatoare.
Soluia particular a ecuaiei neomogene se caut sub forma:
x
2
= C sin t + D cos t = X
0
sin (t - ) i nlocuind obinem:
- m X
0
2
sin ( t - ) + C X
0
cos ( t - ) + k X
0
sin ( t - ) = F
0
sin t
Distana de la punctul de ncastrare la axul
motorului este l.
Rotorul motorului, de greutate P, are o
excentricitate e fa de axa de rotaie:
a) S se aleag profilul I, n aa fel nct
amplitudinea vibraiilor forate s nu depeasc a ;
Ecuaia diferenial a micrii este:
t sin F kx x c x m
o
= + + & & &
Soluia ecuaiei difereniale este de
forma: x =x
1
+ x
2
unde x
1
este soluia general a ecuaiei
omogene, care a fost determinat anterior i
reprezint vibraia liber a sistemului, vibraie
care se amortizeaz rapid, n continuare
micarea staionar fiind corespunztoare
34
(- m X
0
2
+ k X
0
) (sin t cos - sin cos t) + C X
0
(sin t sin +
+cos t .cos ) = F
0
sin t
sin t [cos (- m X
0
2
+ kX
0
) + c X
0
sin ]+cos t [sin (m X
0
2
- kX
0
)
+ cX
0
cos ] = F
0
sin t
Identificnd termenii obinem:
(- m X
0
2
+ k X
0
) cos + c X
0
sin = F
0
( m X
0
2
+ k X
0
) sin + c X
0
cos
= 0
Rezult:
2
o
o
2 2
o
o
2 2
o
2
1
2
2
) ( m
c
m k
c
tg
|
|
.
|
\
|
|
|
.
|
\
|
=
=
=
=
unde:
o cr
m 2
c
km 2
c
c
c
= = =
( )
( ) ( ) | | ( )
2
o
2
2
o
o
2
o
2
2 2
o
o
o
2
o
o
2 1
1
k
F
2 m
F
X
sin c cos k m
F
X
|
|
.
|
\
|
+
(
(
|
|
.
|
\
|
=
+
=
+ +
=
Soluia staionar dat de vibraia forat este:
) t sin(
2 1
1
k
F
x
2
o
2
2
o
o
|
|
.
|
\
|
+
(
(
|
|
.
|
\
|
=
Dac se noteaz X
st
=F
o
/k ,
se definete factorul de amplificare:
Fig.2.19
a) Cu ct amortizarea este mai mare amplitudinea la rezonanta este mai mic;
st
o
2
o
2
2
o
1
X
X
2 1
1
A =
|
|
.
|
\
|
+
(
(
|
|
.
|
\
|
=
Factorul de amplificare reprezint
raportul dintre deformaia dinamic maxim n
timpul micrii vibratorii i deformaia
sistemului (practic a arcului) sub aciunea
forei F
o
, aplicat static.
n figura 2.19 se prezint variaia lui A
1
n funcie de raportul /-
o
.w
Din analiza acestei diagrame diagrame rezult:
35
b) Efectul amortizrii se resimte numai n vecintatea zonei de rezonan, n
rest curbele coincid. Rezult c un amortizor este util numai pentru un
sistem care lucreaz n apropierea rezonanei sau trece prin rezonan;
c) Curbele au maximum puin n stnga rezonanei sistemului neamortizat.
2.3.4. Excitaia prin for centrifug n sistem cu amortizare vscoas
Dac fora perturbatoare armonic este produs de o mas excentric rotitoare,
atunci are expresia (fig. 2.19):
Fig.2.19
2.3.5. Transmisibilitate
S considerm un sistem oscilant care execut vibraii forate amortizate
(fig.2.20). Dac asupra masei m acioneaz o for periodic de amplitudine F
o
, se
cere s se determine amplitudinea F
T
a forei transmise la suport.
Fig.2.20
F
(t)
= m
o
r
o
2
sin t
amplitudinea ei fiind funcie de .
Ecuaia diferenial a micrii este:
t sin r m kx x c x m
2
o o
= + + & & &
Rezolvarea acestei ecuaii d soluia staionar
a vibraiei forate a crei amplitudine este:
2
o
o o
o
A
m m
r m
X
+
= , unde factorul de amplificare A
2
este:
=
+
=
o
o o
o
2
X
r m
m m
A
2
o
2
2
o
2
o
2 1
|
|
.
|
\
|
+
(
(
|
|
.
|
\
|
|
|
.
|
\
|
Forele transmise de arc i amortizor la suport sunt:
F
1
= kx i x c F
2
& = unde:
x = X
o
sin(t - ) = AX
st
sin(t - )
) t cos( AX x
st
= &
ntruct F
1
i F
2
sunt defazate cu /2, amplitudinea forei
rezultante este:
= + = + =
2 2
st
2 2 2
st
2 2 2
max 2
2
max 1 T
X A c X A k F F F
2
o
0
2 2 2
st
2 1 A F c k AX
|
|
.
|
\
|
+ = + =
36
Raportul dintre fora transmis i amplitudinea forei perturbatoare se numete
transmisibilitate:
Fig.2.21
Dac suportul este supus unei deplasri armonice : u = U
o
sin t masa va avea o
deplasare x = X
o
sin (t - ), iar transmisibilitatea micrii este definit de relaia:
2
o
2
2
o
2
o
o
o
2 1
2 1
U
X
T
|
|
.
|
\
|
+
(
(
|
|
.
|
\
|
|
|
.
|
\
|
+
= =
Din examinarea reprezentrii grafice a transmisibilitii rezult c
transmisibilitatea este subunitar pentru 2
o
>
i cu att mai mic cu ct
amortizarea este mai mic.
Izolarea antivibratorie a mainilor este o problem de transmisibilitate.
Problema izolrii antivibratorii se pune n dou moduri:
maina produce fore perturbatoare F
(t)
i se urmrete ca transmiterea acesteia
la fundaie s fie atenuat (izolare activ);
maina este aezat pe o pardoseal aflat n vibraie i se cere ca vibraiile
transmise mainii s fie ct mai reduse (izolare pasiv).
Pentru a realiza izolarea antivibratorie este necesar ca ntre main i fundaie
s se interpun o suspensie elastic. Din punctul de vedere al transmisibilitii, deci al
2
o
2
2
o
2
o
o
T
2 1
2 1
F
F
T
|
|
.
|
\
|
+
(
(
|
|
.
|
\
|
|
|
.
|
\
|
+
= =
n cazul vibraiilor forate
neamortizate:
c = 0 = 0 T =
|
|
.
|
\
|
o
1
1
Se observ c T = 1
pentru
o
= 0 i 2
o
=
n figura 2.21 este reprezentat variaia
transmisibilitii, funcie de /
o
.
37
izolrii, amortizarea nu este de dorit. Ea exist ns, din necesitatea de a micora
amplitudinea i transmisibilitatea la rezonan.
Se observ c izolarea este eficace (T < 1) pentru: 2
o
>
Se definete gradul de izolare al unei suspensii elastice: I
s
= (1 - T).100 [%]
2.3.6. Energii la vibraii forate cu amortizare vscoas
Pentru vibraii forate amortizate se definesc trei feluri de energii:
a) Energia total a sistemului n vibraie, egal cu energia acumulat de arc n
poziia de deformaie maxim, cnd x = X
o
, se mai numete i energie potenial sau
energie de deformaie:
W
P
=
2
o
kX
2
1
b) Energia disipat pe ciclu prin frecare, este egal cu lucrul mecanic al forei
de frecare i depinde de frecven:
2
o
/ 2
o
o o
/ 2
o
/ 2
o
c d
X c dt ) t cos( X ) t cos( cX dx x c dx F W = = = =
&
c)Energia introdus n sistem n decursul unei perioade, de ctre fora
perturbatoare armonic:
= = =
sin X F dt ) t cos( X t sin F Fdx W
o o
/ 2
o
o o
/ 2
o
F
2.3.7. Turaia critic a arborilor
S considerm un arbore elastic de mas neglijabil, ncrcat la mijloc cu un
disc de mas m, aezat pe dou reazeme (fig. 2.22).
Discul este dezaxat cu excentricitatea e.
n timpul rotirii arborelui, masa m va produce fora centrifug: F
c
= m
2
e
care va deforma elastic arborele, sgeata n dreptul discului fiind .
Arborele se deformeaz pn cnd fora elastic dezvoltat de arbore
echilibreaz fora centrifug.
Fig.2.22
Pentru =
o
sgeata arborelui devine infinit.
( ) e m F
k F
2
c
e
+ =
=
k ( ) e m
2
+ =
2
2
m k
e m
=
2
o
2
o
2 2
o
2
2
2
1
e
e
m
k
e
|
|
.
|
\
|
|
|
.
|
\
|
=
38
Turaia corespunztoare acestei pulsaii se numete turaie critic i se
calculeaz cu relaia:
=
o
c
30
n rot/min
Pentru <
o
> 0
Pentru e arborele se autocentreaz, acesta rotindu-se n
jurul unei axe care trece prin centrul de greutate G al discului.
2.4. Vibraii forate amortizate produse de o excitaie periodic
nearmonic
Dac fora excitatoare F(t) nu este armonic, dar este periodic, expresia ei
poate fi dezvoltat ntr-o sum finita sau infinit de componente armonice prin
dezvoltare n serie Fourier:
F(t)=A
o
+A
1
cos t+B
1
sin t+A
2
cos 2t+B
2
sin 2t++A
n
cos(nt)+B
n
sin(nt)+
unde coeficienii A
o
, A
n
i B
n
au expresiile:
A
o
=
T
0
dt ) t ( F
T
1
A
n
=
T
2
T
0
dt ) t n cos( ) t ( F
B
n
=
T
0
dt ) t n sin( ) t ( F
T
2
cu n=1,2,3,
Deci : F(t)=A
o
+
= 1 n
A (
n
cosnt+B
n
sinnt)
Dac se noteaz: F
o
= A
o
; F
n
=
2
n
2
n
B A + i tg
n
=
n
n
B
A
rezult:
F(t) = F
o
+
=1 n
n
n sin( F t+
n
)
Dac excitaia acioneaz asupra unui sistem elastic liniar, cu amortizare
vscoas, atunci putem aplica principiul suprapunerii efectelor pentru stabilirea
soluiei. n cazul unui sistem cu amortizare vscoas, componentele datorit
vibraiilor proprii se amortizeaz rapid rmnnd numai soluia staionar, care are
expresia: x =
|
|
.
|
\
|
+
(
(
|
|
.
|
\
|
=
n sin(
2 n
1 k
k
1 n
2
o
2
2
o
n F Fo
t-
n
)
unde:
n
=arctg
2
o
o
n
1
n
2
|
|
.
|
\
|
39
Dac se noteaz cu x
1
, x
2
, , x
n
, amplitudinile deplasrilor diferitelor
armonici, ecuaia micrii se scrie:
x = x
o
+ x
1
sin(t-
1
) + x
2
sin(2t-
2
) + + x
n
sin(nt-
n
) +
n mod similar notnd amplitudinile acceleraiilor:
a
1
= -x
1
2
; a
2
= -4x
2
2
; ; a
n
= -n
2
x
n
2
Se poate scrie expresia acceleraiilor:
a =a
1
sin(t-
1
) +a
2
sin(2t-
2
)++a
n
sin(nt-
n
) +
n studiul unei astfel de micri este util s cunoatem amplitudinile x
1
, x
2
, , x
n
, ...
ale deplasrilor sau a
1
, a
2
, , a
n
, ... ale acceleraiilor armonicelor componente.
a)
b)
c)
Fig. 2.23
40
Graficul discontinuu care d aceste mrimi, funcie de frecven, se numete
spectrul deplasrilor, sau al acceleraiilor.
Aceste spectre pot fi obinute pe cale experimental introducnd un filtru de
band n schema bloc a lanurilor pentru msurarea vibraiilor.
n fig.2.23 sunt prezentate spectrele acceleraiilor pentru trei micri:
a) micarea pur sinusoidal;
b) suprapunerea a dou micri armonice cu frecvenele n raport 1:2;
c) succesiune de impulsuri dreptunghiulare. n acest caz spectrul acceleraiilor are
o infinitate de armonice, dintre care sau reprezentat primele patru armonice, celelalte
fiind neglijabile.
Rezult c reprezentarea n domeniul frecven a unei mrimi periodice,
conduce la un spectru format din linii discrete, numrul acestora putnd fi finit
sau infinit.
2.5. Vibraii n sisteme cu n grade de libertate
Sistemele elastice nu pot fi studiate ntotdeauna cu ajutorul modelului avnd o
singur mas, deci un singur grad de libertate.
Pentru a analiza teoretic vibraiile acestor sisteme este necesar ca ele s fie
schematizate prin modele cu mai multe grade de libertate (fig. 2.24).
a) b)
c) d)
Fig.2.24
De exemplu, vibraiile unui vehicul pe dou osii, pot fi studiate n cel mai
simplu caz cu ajutorul modelului cu dou grade de libertate, a crei micare este
determinat de doi parametri x i , deci modelul are dou grade de libertate
(fig.2.24.a).
41
Vibraiile transversale ale unei maini unelte, rezemat pe reazeme
vibroizolante pe fundaie, care este aezat pe un mediu elastic, pot fi studiate de
asemenea, cu modelul cu dou grade de libertate (fig.2.24.c).
Vibraiile flexionale i torsionale ale arborilor pot fi analizate pe modele cu n
grade de libertate, obinute prin concentrarea masei n n puncte, poriunile dintre
mase fiind considerate de mas neglijabil i de rigiditate GI
p
i respectiv EI
(fig.2.24.b,d).
2.5.1.Vibraii libere neamortizate n sisteme cu dou grade de libertate
S considerm sistemul din fig. 2.25, format din masele m
1
i m
2
legate de
reperele fixe prin arcurile de constante elastice k
1
i k
2
i ntre ele prin arcul de
constant elastic k
12
. S notm cu x
1
(t) i x
2
(t) deplasrile independente ale celor
dou mase fa de poziia de echilibru static.
Dac se izoleaz masele i se aplic forele de legtur i forele de inerie, se
poate scrie ecuaia de echilibru dinamic pentru fiecare mas, folosind principiul lui
d
Alembret. Rezult sistemul:
Fig. 2.25
Am obinut un sistem algebric liniar i omogen, cu necunoscute A
1
i A
2
, care
admite soluii diferite de soluia banal (A
1
=0 i A
2
=0) dac:
(
+ +
+ +
=
12 2
2
2 12
12 12 1
2
1
k k m k
k k k m
se numete determinantul lui Lagrange. Dezvoltnd determinantul obinem
ecuaia:
( )
) (
0
m m
k k k k k
m
k k
m
k k
2 1
2 1 12 2 1
2
2
12 1
1
12 2
2
2
=
+ +
+
|
|
.
| +
+
\
| +
+
care se numete ecuaia pulsaiilor proprii sau naturale.
Rezolvnd ecuaia obinem soluiile pozitive care reprezint pulsaiile proprii
ale sistemului. S rezolvm ecuaia pentru cazul particular n care:
k
1
= k
2
= k ; m
1
= m
2
= m;
( )
( )
2 2 2 1 12 2 2
2 1 12 1 1 1 1
x k x x k x m
x x k - x k x m
=
=
& &
& &
Pentru integrarea sistemului
se caut soluii de forma:
x
1
= A
1
sin (t + )
x
2
= A
2
sin (t + )
Rezult:
(-m
1
2
+ k
1
+ k
12
) A
1
- k
12
A
2
= 0
k
12
A
1
+ (-m
2
2
+k
2
+k
12
) A
2
=0
42
( )
m
k
0
m
kk 2 k
m
k k
2
2
1
2
12
2
2
12
2
2
= =
+
+
+
i
m
k 2 k
12
2
2
+
=
Pulsaiile proprii sunt:
m
k
1
= i
m
k 2 k
12
2
+
=
Pentru:
2
1
1
A
A
= 1
k k
m
k
m
k
k k m
k
12
12
12
2
1
12
=
+ +
=
+ +
=
1
k k
m
k 2 k
m
k
k k m
k
A
A
12
12
12
12
2
2
12
2
1
2
=
+ +
+
=
+ +
= =
Deci, pentru
1 2 1 1
A A = = = se obine primul mod propriu de
vibraie, care este dat de soluia :
|
.
|
+
\
|
=
1 1 1
t
m
k
sin x
|
.
|
+
\
|
=
1 1 2
t
m
k
sin x
Rezult c n primul mod de vibraie, masele vibreaz cu aceiai amplitudine i
n acelai sens, deci sistemul vibreaz fr ca resortul k
12
s se deformeze, deci
vibreaz ca un sistem cu un singur grad de libertate, avnd pulsaia:
m
k
1
=
Pentru :
2 2 1 2
A A = = = i soluia sistemului este :
|
.
|
+
\
|
+
=
2
12
2 1
t
m
k 2 k
sin x
|
.
|
+
\
|
+
=
2
12
2 2
t
m
k 2 k
sin x
Amplitudinile sunt egale, cele dou mase vibreaz n sensuri opuse, n raport
cu punctul median. Am obinut cel de al doilea mod propriu de vibraie.
Soluia general a sistemului de ecuaii se obine sumnd soluiile particulare:
( ) ( )
( ) ( )
2 2 2 1 1 1 2
2 2 2 1 1 1 1
t sin t sin x
t sin t sin x
+ + =
+ + + =
2.5.2. Vibraii libere neamortizate n sisteme cu n grade de libertate
n cazul sistemelor cu n grade de libertate, pentru fiecare grad de libertate x
j
se
poate scrie ecuaia : m
j
j
x& & = Q
j
n care :
m
j
este masa sau momentul de inerie masic, corespunztor gradului de
libertate j;
43
x
j
este acceleraia de translaie sau rotaie, dup gradul de libertate j;
Q
j
este rezultanta forelor sau cuplurilor aplicate sistemului dup gradul de
libertate j.
Pentru ntocmirea modelului matematic trebuie cunoscute:
masele m
j
;
constantele elastice k
jk
;
amortizrile;
forele perturbatoare.
Constanta elastic generalizat k
jk
a gradului de libertate j dup direcia
k este egal cu fora elastic care acioneaz asupra gradului de libertate de ordinul j,
cnd are loc o deplasare lent, egal cu unitatea, numai pe direcia negativ, a
gradului de libertate k. Un sistem elastic, cu n grade de libertate, poate fi caracterizat
complet prin n constante elastice. Constantele elastice respect legea reciprocitii:
k
jk
=k
kj
Fora elastic total, care acioneaz asupra gradului de libertate k, este suma
efectelor deplasrilor pe toate gradele de libertate:
F
el.k
= -
=
n
1 k
k
jk
x
k
Semnul minus arat c fora elastic este opus micrii. Cele n ecuaii de
micare se pot scrie sub forma:
m
j
j
x& & +
=
n
1 k
k
jk
x
k
= F
j
cu: j = 1,2,...,n
n care F
j
reprezint suma forelor exterioare.
n cazul vibraiilor libere neamortizate forele exterioare sunt nule i deci
ecuaiile de micare se pot scrie sub forma:
m
j
j
x& &
+
=
n
k 1
k
jk
x
k
= 0 unde: j = 1, 2 n .
Soluiile acestui sistem de ecuaii difereniale sunt de forma:
x
j
= D
j
sin (t + )
nlocuind soluia n sistem obinem sistem algebric de forma:
m
j
D
j
2
-
=
n
k 1
k
jk
D
k
= 0 cu: j = 1,2,n
Dezvoltnd sistemul se obine:
m
1
D
1
2
-
=
n
k 1
k
1k
D
k
= 0
m
2
D
2
2
-
=
n
k 1
k
2k
D
k
= 0
..
m
n
D
n
2
-
=
n
k 1
k
nk
D
k
= 0
Am obinut un sistem algebric liniar, omogen, cu necunoscute D
j
( j =1,2..n).
44
Sistemul admite soluii diferite de soluia banal dac determinantul principal
al sistemului este nul:
0
k m ...... k k k
... ... ... ...
k ...... k k m k
k ...... k k k m
nn
2
nn 3 n 2 n 1 n
n 2 23 22
2
22 21
n 1 13 12 11
2
11
=
Dezvoltnd acest determinant obinem ecuaia pulsaiilor proprii (de gradul n n
2
).
Rezolvnd ecuaia obinem cele n pulsaii proprii (sau naturale) ale sistemului.
Dac sistemul nu este supus la fore exterioare acesta poate vibra cu una sau
mai multe pulsaii proprii. Un sistem vibrnd cu una din pulsaiile proprii
n
, are o
distribuie a amplitudinilor numit mod propriu de vibraii.
Un mod propriu de vibraii este definit printr-un ir de valori D
jn
care satisfac
sistemul de ecuaii: m
j
D
jn
n
=
=
n
k 1
k
jk
D
kn
cu j = 1,2 n
Aplicaie: Se d sistemul cu trei grade de libertate (fig. 2.26), format din trei
mase aezate pe un suport rigid, legate n serie prin trei arcuri, avnd aceiai
constant elastic. Deplasrile absolute ale maselor sunt: x
1
, x
2
, x
3
.
S se determine pulsaiile proprii.
Fig.2.26
k
11
= k + k =2k k
23
= k
32
= -k
k
12
= k
21
= -k k
33
= k
k
22
= k + k = 2k k
31
= k
13
= 0
Ecuaia pulsaiilor proprii este :
m
2
2k k 0
k m
2
2k k = 0
0 k m
2
k
3
2
k
m
|
|
.
|
\
|
2
2
k
m
5
|
|
.
|
\
|
+6 1
k
m
2
|
|
.
|
\
|
1
= 0.445
m
k
;
2
= 1.25
m
k
;
3
= 1.8
m
k
2.5.3. Determinarea ecuaiilor de micare folosind ecuaiile lui Lagrange
Pentru un sistem oscilant cu n grade de libertate vom nota cu q
i
(i=1,2,n)
parametrii independeni ce depind de timp, cu care se studiaz micarea vibratorie,
45
numite coordonate generalizate. Originile acestor coordonate se aleg, n general,
astfel ca valorile lor s fie nule n poziia de echilibru static sau n micarea de regim.
n acest caz ecuaiile lui Lagrange se scriu sub forma :
i
i
c
i
c
Q
q
E
q
E
dt
d
=
|
|
.
|
\
|
&
unde
q& i
reprezint vitezele generalizate, E
c
este energia cinetic total a sistemului,
iar Q
i
sunt forele generalizate, care corespund tuturor forelor ce acioneaz asupra
sistemului (fore elastice, de amortizare i perturbatoare).
Vibraiile se efectueaz fa de poziia de echilibru static, n care am considerat
originea tuturor coordonatelor generalizate i n care vom presupune energia
potenial nul. De aceea, ca i n cazul sistemelor cu un grad de libertate, n calculul
forelor generalizate nu se consider forele gravitaionale.
Pentru un sistem conservativ, fr pierderi de energie prin amortizare, aflat n
vibraie liber, forele elastice sunt derivatele cu semn schimbat ale energiei
poteniale E
p
a sistemului n raport cu coordonatele generalizate q
i
: - E
p
/ q
i
.
Forele de amortizare vscoas sunt egale cu derivatele cu semn schimbat ale
energiei disipate E
d
a sistemului, n raport cu viteza generalizat q&
i
: - E
d
/ q&
i
Notnd cu F
i
forele perturbatoare, atunci:
i
i
d
i
p
i
F
q
E
q
E
Q +
=
&
i ecuaiile lui Lagrange se pot scrie sub forma:
i
i
d
i
p
i
c
i
c
F
q
E
q
E
q
E
q
E
dt
d
=
|
|
.
|
\
|
& &
unde: E
c
= 1/2.
=
n
1 j , i
m
ij
q&
i
q&
j
E
p
= 1/2.
=
n
1 j , i
k
ij
q
i
q
j
E
d
= 1/2.
=
n
1 j , i
c
ij
q&
i
q&
j
unde : m
ji
, k
ij
i c
ij
se numesc coeficieni de inerie, de rigiditate i respectiv de
amortizare. Din motive de simetrie, pentru i = j avem: m
ij
= m
ji
; k
ij
= k
ji
; c
ij
= c
ji
.
Dac n sistemul ecuaiilor Lagrange cel puin unul din coeficienii m
ij
este
diferit de zero, pentru i = j, se spune c sistemul este cuplat dinamic, iar dac cel
puin unul din coeficienii k
ij
= 0, pentru i = j, se spune c sistemul este cuplat static.
n cazul n care m
ij
= 0 i k
ij
= 0, pentru i = j, se obin n ecuaii independente.
2.5.4. Vibraii amortizate n sisteme cu n grade de libertate
Stabilirea ecuaiilor de micare la sistemele cu n grade de libertate (fig. 2.27.a)
se poate face utiliznd principiul lui dAlambert sau ecuaiile lui Lagrange.
46
Se obine un sistem de n ecuaii difereniale ordinare, cu coeficieni constani,
omogen sau neomogen, dup cum vibraiile studiate sunt libere sau forate.
a) b)
Fig. 2.27
Scriind ecuaia de echilibru dinamic a masei m
j
se obine (fig. 2.27.b):
) t ( f ) x x ( c ) x x ( c ) x x ( k ) x x ( k x m
j 1 j j 1 j 1 j j j 1 j j 1 j 1 j j j j j
= + + + +
+ + + +
& & & & & &
) t ( f x k x ) k k ( x k x c x ) c c ( x c x m
j 1 j 1 j j 1 j j 1 j j 1 j 1 j j 1 j j 1 j j j j
= + + + +
+ + + + + +
& & & & &
Dac se scrie aceast ecuaie pentru cele n mase din sistem, rezult un sistem
de n ecuaii difereniale, care se poate scrie sub form matricial.
| | { } x m & & +| | { } x c & + | | { } x k ={ } f
unde am notat :
| |
(
(
(
(
=
n
2
1
m ... 0 0
... ... ... ...
0 ... m 0
0 ... 0 m
m matricea maselor;
| |
(
(
(
(
(
(
+
+
+
+
=
+1 n n n
4 4 3 3
3 3 2 2
2 2 1
c c c 0 0 0 0
... ... ... ... ... ...
0 ... c c c c 0
0 ... 0 c c c c
0 ... 0 0 c c c
c
| |
(
(
(
(
(
(
+
+
+
+
=
+1 n n n
4 4 3 3
3 3 2 2
2 2 1
k k k 0 0 0 0
... ... ... ... ... ...
0 ... k k k k 0
0 ... 0 k k k k
0 ... 0 0 k k k
k
{ }
=
n
2
1
x
...
x
x
x ; { }
=
n
2
1
x
...
x
x
x
&
&
&
& ; { }
=
n
2
1
x
...
x
x
x
& &
& &
& &
& & ; { }
=
n
2
1
f
...
f
f
f
-vectorul deplasrilor; vectorul vitezelor; vectorul acceleraiilor; vectorul forelor.
-matricea
coeficienilor de
amortizare
-matricea
constantelor elastice
47
Matricile parametrilor sistemului au forma de mai sus atunci cnd coordonatele
generalizate exprim deplasrile maselor i cnd arcurile i amortizoarele sunt legate
ntre dou mase consecutive. Cnd acestea sunt legate ntre mase i un suport fix, sau
ntre mase neconsecutive, apar n matrice i elemente nediagonale.
Dup cum se observ, ecuaiile difereniale de micare sunt ecuaii dependente
i deci nu pot fi rezolvate independent. Pentru decuplarea ecuaiilor de micare se
folosete analiza modal, n cadrul creia se face trecerea de la coordonatele
generalizate la coordonatele principale cu ajutorul matricei modale.
Moduri proprii de vibraii
Pulsaiile proprii i formele modurilor proprii de vibraie se obin prin
rezolvarea sistemului de ecuaii omogene pentru vibraii libere neamortizate:
| | { } x m & & + | | { } x k ={ } f
Soluiile sistemului de ecuaii x
1
, x
2
,. , x
n
se caut sub forma:
{ } { } ) t sin( a ) t sin(
a
...
a
a
x
n
2
1
+ = +
=
care reprezint o micare armonic sincron n toate coordonatele .
nlocuind soluiile sistemului n sistemul de ecuaii de micare se obine:
| | | | ( ) { } { } 0 a m k
2
=
Pulsaiile proprii sunt soluiile ecuaiei algebrice:
det | | | | ( ) m k
2
= 0
care are n rdcini reale, pozitive, n general distincte
1
,
2
,,
n
.
Exist deci n pulsaii
r
(r = 1, 2 , , n) n care este posibil o micare
armonic. Fiecrei pulsaii
r
i corespunde un vector {a
(r)
} cu elemente reale
) r (
j
a astfel nct este satisfcut relaia matriceal:
| | | | ( ) { } { } 0 a m k
r 2
r
=
Vectorii proprii {a
(r)
} se numesc vectori modali. Se noteaz:
{ } { }
) r ( ) r (
1
) r (
n
) r (
2
) r (
1
) r (
1
) r (
n
) r (
2
) r (
1
) r (
a
...
a
a
...
a
a
a =
=
unde { }
) r (
este vectorul propriu normalizat de ordinul r, iar termenul
r
1
r
j r
j
a
a
= este
un element adimensional ( 1
) r (
0
= ). Legea de micare pentru modul propriu de
vibraie de ordinul r este dat de vectorul:
48
{ } { } { } { }
r
) r (
r r
) r (
1
) r (
r r
) r ( ) r (
) t sin( a ) t sin( a x = + = + =
n care:
r
= ) t sin( a
r r
) r (
1
+ este coordonata principal de ordin r.
Micarea general a sistemului este dat de o suprapunere de moduri proprii:
{ } { } { } ) t sin( a ... ) t sin( a x
n n
) n (
1
) n (
1 1
) 1 (
1
) 1 (
+ + + + =
n care
) n (
1
) 1 (
1
a ,..., a i
1
,
2
, ,
n
sunt 2n constante care se determin din cele 2n
condiii iniiale.
{ } { } | | { } = =
=
A x
r
n
1 r
) r (
unde | | A se numete matricea modal i are vectorii proprii normalizai drept
coloane:
| | { }{ } { } | |
(
(
(
(
(
= =
) n (
n
) 2 (
n
) 1 (
n
) n (
2
) 2 (
2
) 1 (
2
) n (
1
) 2 (
1
) 1 (
1
) n ( ) 2 ( ) 1 (
...
.... ... .... ....
...
...
.... A
iar | | este matricea coloan a coordonatelor principele.
Dac se face transformarea de coordonate { } | | { } = A x n ecuaia matricial,
obinem:
| | | | { }
& &
A m + | | | | { } A k = { } 0
nmulind la stnga cu transpusa | |
A a lui | | A obinem:
| |
A . | | | | { }
& &
A m + | |
A . | | | | { } A k ={ } 0
Se poate arta c urmtoarele matrici sunt diagonale:
| | | | | | | | A m A M
= - matricea maselor generalizate sau a maselor modale;
| | | | | | | | A k A K
= - matricea constantelor elastice generalizate.
Deci ecuaia matricial devine:
| | { }
& &
M +
| | { } K
={ } 0
Prin desfurare obinem:
M
1
1
& &
+ K
1
1
= 0
M
n
n
& &
+ K
n
n
= 0
Rezult c, n coordonate principale, micarea este caracterizat de n ecuaii
independente, care se rezolv separat, la fel ca ecuaia sistemului cu un grad de
libertate.
Pulsaiile proprii au expresiile:
{ } | | { }
{ } | | { }
) r ( ) r (
) r ( ) r (
r
r 2
r
m
k
M
K
= = cu r = 1,2, ,n.
49
2.5.5. Vibraii forate cu amortizare vscoas n sisteme cu n grade de
libertate
S considerm ecuaiile vibraiilor forate ale unui sistem cu n grade de
libertate i amortizare vscoas scrise sub form matriceal:
| | { } x m & & +| | { } x c & + | | { } x k = { } f
Dac se efectueaz transformarea de coordonate: { } | | { } = A x i se nmulete
ecuaia cu transpusa | |
A a matricei modale, rezult:
| |
A . | | | | { }
& &
A m +| |
A . | | | | { } A c + | |
A . | | | | { } A k =| |
A .{ } f
n cazul amortizrii proporionale se noteaz:
| |
A . | | | | | | C A c = - matricea coeficienilor de amortizare generalizai;
| |
A . | | | | = f vectorul forelor generalizate.
Ecuaia matricial devine:
| | { }
& &
M +
| | { } C
+
| | { } K
={ } i reprezint un sistem de n ecuaii de forma:
M
r
r
& &
+ C
r
r
&
+ K
r
r
=
r
care descrie micarea n modul r de vibraie, caracterizat de variaia coordonatei
principale
r
. Fiecare ecuaie se poate rezolva separat, la fel ca i ecuaia vibraiilor
forate amortizate ale sistemului cu un grad de libertate.
n cazul unei excitaii armonice: {f} = {F} sin t i rezult
fora generalizat :
r
=
r
sin t cu r = 1 , 2 , .. , n.
Soluia ecuaiei este:
) t sin(
2 1 K
r
2
r
r
2
2
r
r
r
r
|
|
.
|
\
|
+
(
(
|
|
.
|
\
|
=
unde:
r
r 2
r
M
K
= ;
r r
r
r
M 2
C
= i
2
r
r
r
r
1
2
arctg
|
|
.
|
\
|
=
Soluia general a micrii sistemului este:
{ } { }
{ } { }{ }
) t sin(
2 1 K
F
x
r
n
1 r
2
r
r
2
2
r
r
r r
n
1 r
r
r
|
|
.
|
\
|
+
(
(
|
|
.
|
\
|
w
-
m
m
= x m =
= =
50
2.5.6. Vibraii de rsucire la angrenaje
S considerm sistemul oscilant din figura 2.28, n structura cruia exist un
angrenaj ale crui elemente au inerie neglijabil comparativ cu discurile J
1
i J
2
.
Fig.2.28
Raportul de transmitere este: i
1,2
=
1
/
2
= z
2
/z
1
= i, unde
1
i
2
sunt
vitezele unghiulare ale arborilor cu constante elastice k
1
respectiv k
2
, iar z
1
i z
2
sunt
numerele de dini ale roilor dinate. Se consider c angrenajul reprezint o legtur
rigid care transform turaiile, amplitudinile i cuplurile cu raportul i
1,2
, neglijnd
elasticitatea dinilor i a carcasei, jocurile dintre flancurile dinilor etc.
Determinarea caracteristicilor vibraiilor de rsucire ale sistemului se poate
simplifica dac sistemul real este nlocuit cu un sistem echivalent din punct de vedere
dinamic, n care discurile i arborii se rotesc cu aceiai turaie.
Pentru ca cele dou sisteme s fie echivalente trebuie ca:
puterea: ( M
t
)
real
= ( M
t
)
echiv
energia cinetic: ( J
2
)
real
= ( J
2
)
echiv
energia potenial: ( k
2
)
real
= ( k
2
)
echiv
Rezult relaiile de calcul ai parametrilor sistemului echivalent:
M
t echiv
= (
real
/
echiv
) M
t real
J
echiv
= (
real
/
echiv
)
2
J
real
K
echiv
= (
real
/
echiv
)
2
K
real
Deoarece:
echiv
= (
echiv
/
real
)
real
K
echiv
= (
real
/
echiv
) K
real
Rezult urmtoarele relaii de echivalen:
J
2echiv
= (
2
/
1
)
2
J
2
= (1/i)
2
J
2
K
2echiv
= (
2
/
1
)
2
K
2
= (1/i)
2
K
2
Constanta elastic a arborelui se calculeaz cu relaia:
2 1
2
2 1
2
2
1
k k i
k k
k
k
i
k
1
k
1
+
= + =
Pulsaia proprie a sistemului echivalent este dat de relaia:
( )
2 1
2
2 1
2 1
2 1
2
2
2
1
2
2
1
2
k k i
k k
J J
J J i
i
J
J
i
J
J k
+
+
=
|
.
|
\
|
+
=
51
2.6. Metode aproximative pentru studiul vibraiilor
sistemelor cu n de grade de libertate
Pentru determinarea pulsaiilor proprii ale unui sistem cu n grade de libertate
este necesar s se rezolve ecuaia pulsaiilor proprii, care este o ecuaie algebric de
gradul n n
2
. n numeroase aplicaii prezint interes, practic, numai pulsaia
proprie cea mai cobort, numit i pulsaie fundamental.
Pentru calculul pulsaiei fundamentale s-au elaborat o serie de metode
aproximative care permit calculul acesteia, fr s rezolvm ecuaia, dintre care cele
mai folosite sunt: metoda Rayleigh, metoda Holtzer, metoda matricelor de transfer,
metoda iteraiei matriceale etc.
2.6.1. Metoda Rayleigh
La un sistem conservativ (sistem oscilant fr amortizri, n care nu se produc
schimburi de energie cu exteriorul), n vibraie liber, suma energiilor cinetic i
potenial, n orice moment al micrii, este constant: . const E E
p c
= + .
n aproximaia lui Rayleigh se admite c toate punctele sistemului oscilant trec
la un moment dat prin poziia de deformaie maxim, cnd energia potenial este
maxim i energia cinetic
c
E = 0 i de asemenea, toate punctele trec simultan prin
poziia de zero, cu viteza maxim, cnd energia cinetic este maxim i
p
E = 0.
Altfel spus, pentru vibraia liber, dup un mod propriu de vibraie, este valabil
principiul lui Rayleigh: energia cinetic maxim este egal cu energia potenial
maxim. Ecuaia conservrii energiei devine:
max p max c
E E =
Principiul lui Rayleigh este folosit n special pentru determinarea primei
pulsaii proprii, alegnd pentru modul fundamental de vibraie forma rezultat din
deformaiile statice produse de greutile maselor din sistem.
Aplicaie
a) S se determine expresia aproximativ a pulsaiei proprii fundamentale a
vibraiilor flexionale ale unui arbore, de mas neglijabil, pe care sunt montai n
volani (fig.2.29).
Fig.2.29
Se presupune c toi volanii au o micare armonic sincron pe direcie
vertical, deformaia dinamic a arborelui avnd expresia:
) t sin( ) x ( f ) t , x ( y + =
Se calculeaz energia cinetic maxim, considernd numai micarea de
translaie a maselor pe direcia vertical y:
52
2 2
i
n
1 i
i max c
f m
2
1
E =
=
Energia potenial maxim este egal cu lucrul mecanic efectuat de forele
g m
i
:
i
n
1 i
i max p
f g m
2
1
E =
=
unde
i
f este amplitudinea vibraiei masei
i
m .
Funcia
i
f trebuie s ndeplineasc condiiile la limit ale problemei.
De obicei, pentru funcia
i
f se alege funcia sgeilor produse de forele
concentrate g m
i
, aplicate static. n acest caz, valorile
i
f se pot calcula cu relaiile
din cursul de Rezistena Materialelor, stabilite cu metoda Mohr-Maxwell sau
Castigliano. Egalnd cele dou expresii ale energiilor se obine formula pulsaiei
proprii fundamentale:
=
=
=
n
1 i
2
i i
n
1 i
i i
2
f m
f m g
, numit i raportul lui Rayleigh.
b) S se determine pulsaia proprie pentru un sistem oscilant cu un singur grad
de libertate, atunci cnd se consider i masa elementului elastic.
Fig.2.30
Energia cinetic maxim a elementului de arc, notnd cu m
1
masa unitii de
lungime, este :
dy A
l
y
m
2
1
dy x
l
y
m
2
1
dE
2 2
2
2
1
2
max
1
max c
'
=
|
.
|
\
|
= &
Energia cinetic maxim a ntregului arc este:
2 2 1
l
0
2
2
2 2
1
max c
,
A
3
l m
2
1
dy y
l 2
A m
E =
=
Energia cinetic maxim a sistemului este:
2 2
a max c
A ) m
3
1
m (
2
1
E + = unde: l m m
1 a
= este masa arcului.
Se fac urmtoarele ipoteze:
masa arcului este mic n comparaie cu masa m;
micarea masei m nu este afectat de masa arcului;
se admite c sistemul are o micare armonic de forma:
) t sin( A x + =
Deplasarea unei seciuni y a arcului va fi:
) t sin( A
l
y
y
l
x
+ =
Viteza elementului de arc dy aflat la distana y este:
) t cos( A
l
y
x
l
y
y
l
x
dt
d
v + = =
|
.
|
\
|
= &
53
Energia potenial maxim a sistemului este aceeai ca i cum arcul ar avea
mas neglijabil:
2
max p
kA
2
1
E =
Aplicnd metoda lui Rayleigh obinem:
a
0
m
3
1
m
k
+
=
c) S se determine, prin metoda Rayleigh, pulsaia proprie a sistemului oscilant
din figura 2.31.
Fig.2.31
Rezult:
2
2 2
2
1 1
2
2 2
2
1 1
2
0
b m b m
a k a k
+
+
=
2.6.2. Metoda Holzer
Metoda Holzer este o metod pas cu pas utilizat pentru calculul pulsaiilor
proprii i a formei modurilor proprii de vibraie, pentru sisteme oscilante formate din
mase legate ntre ele cu arcuri, sau din discuri pe arbori n vibraii de rsucire.
S considerm un sistem oscilant format din n mase legate prin n+1 elemente
elastice (fig.2.32). Se detaeaz din sistemul oscilant o mas i arcul alturat:
Fig.2.32
Deformaia
j
a elementului elastic are expresia:
1 j
1 j
j 1 j j
k
F
x x
= =
Se admite c micrile se fac cu aceeai pulsaie i n faz:
) t sin( X x
j j
+ =
Condiia de echilibru dinamic a masei
j
m se exprim prin relaia:
Dac sistemul execut o
oscilaie armonic t sin
0
= ,
atunci, energia potenial i cinetic
maxim are forma:
2
o
2
2 2
2
1 1 max p
) a k a k (
2
1
E + =
) b m b m (
2
1
E
2
2 2
2
1 1
2
0
2
0 max c
+ =
54
j
2
j 1 j j j
2
j max j j j 1 j
X m F F X m ) x m ( F F + = = =
& &
Dac se impune deplasarea primei mase 1 X
1
= , se pot calcula succesiv
amplitudinile deplasrilor tuturor maselor din sistem:
n 2
X ... X
- pentru prima mas:
1
2
1 1 o 1
2
1 0 1
1
X m X k X m F F
1 X
+ = + =
=
- pentru masa
j
m :
i
j
1 i
i
2
1 o j
2
j 1 j j
X m X k X m F F
=
+ = + =
) X k X m (
k
1
X
k
F
X X
1 j
1 i
1 o i i
2
1 j
1 j
1 j
1 j
1 j j
= =
- pentru captul fix al arcului
n
K :
0 ) X k X m (
k
1
X
k
F
X X
n
1 i
1 o i i
2
n
n
n
n
n 1 n
= = =
=
+
La captul opus (j = n ) trebuie s avem 0 X
1 n
=
+
. Dac
2
nu este o pulsaie
proprie a sistemului, atunci ultima relaie nu este verificat i rezult:
) ( g X
2
1 n
=
+
Dac se reprezint grafic funcia ) ( g
2
, atunci valorile pulsaiilor proprii sunt
valorile lui pentru care graficul intersecteaz axa
2
.
Dac pentru valorile determinate ale pulsaiilor proprii se calculeaz
deplasrile
n 3 2
X ,... X , X ale celor n mase din sistem, se obin formele modurilor
proprii de vibraie. Pentru a afla ordinul de mrime al pulsaiilor proprii cutate,
acestea se pot calcula aproximativ cu raportul lui Rayleigh, impunnd formelor
proprii doar condiii de faz.
Determinarea pulsaiilor proprii ale sistemelor care execut vibraii libere de
rsucire se face n acelai mod, lund deplasarea unghiular
j
n locul deplasrii
liniare
j
X , momentul de inerie masic
j
J , n locul masei
j
m i momentul de rsucire
tj
M n locul forei
j
F . Metoda Holzer a fost extins i pentru studiul vibraiilor
amortizate i a vibraiilor forate.
n cazul unui sistem cu capete libere (fig. 2.33) se poate scrie:
Fig. 2.33
-pentru prima mas:
1
2
1 1
2
1 o 1
1
X m X m F F
1 X
= + =
=
- pentru masa
j
m :
i
j
1 i
i
2
j
2
j 1 j j
X m X m F F
=
= + =
55
) X m (
k
1
X
k
F
X X
1 j
1 i
i i
2
1 j
1 j
1 j
1 j
1 j j
= =
- pentru masa din captul liber
n
m : 0 X m F
i
n
1 i
i
2
n
= =
=
n cazul unui sistem cu masa
1
m liber (fig.2.34) i cu arcul
n
k fixat se obine:
Fig. 2.34
- pentru prima mas:
1
2
1 1
1
X m F
1 X
=
=
- pentru masa
j
m :
i
j
1 i
i
2
j
2
j 1 j j
X m X m F F
=
= + =
= =
1 j
1 i
1 i i
1 j
2
1 j
1 j
1 j
1 j j
X m
k
X
k
F
X X
- pentru captul fix al arcului
n
K :
=
+
= =
n
1 i
i i
n
2
n
n
n
n 1 n
X m
k
X
k
F
X X
Aplicaie: Fie un arbore cu n+1 volani, liber la extremiti (fig.2.35).
Fig.2.35
Ecuaiile vibraiilor de rsucire se scriu sub forma:
0 ) ( k J
. .......... .......... .......... .......... .......... ..........
0 ) ( k ) ( k J
0 ) ( k J
n 1 n 1 n n n
2 1 2 1 o 1 1 1
1 o 1 o 0
=
= +
= +
& &
& &
& &
Dac se adun ecuaiile obinem:
0 J ....... J J J
n n 2 2 1 1 o 0
= + + + & & & & & & & &
= =
1 n
1 i
i i
1 n
2
1 n
1 n
1 n
1 n n
X m
k
X
k
F
X X
56
Considernd vibraia dup un mod propriu, se caut soluii de forma:
) t sin( a
........ .......... ..........
) t sin( a
) t sin( a
n n
1 1
o o
+ =
+ =
+ =
Rezult : 0 a J ... a J a J
n n 1 1 o o
= + + +
nlocuind n sistemul de ecuaii difereniale obinem :
0 ) a a ( k a J
......... .......... .......... .......... .......... ..........
0 ) a a ( k ) a a ( k a J
0 ) a a ( k a J
n 1 n n
2
n n
2 1 2 1 o 1
2
1 1
1 o 1
2
o o
= +
=
=
Dac se calculeaz determinantul sistemului, obinem ecuaia pulsaiilor proprii
care se rezolv dificil.
Din prima ecuaie rezult :
o
2
1
0
o 1
a
k
J
a a =
A doua ecuaie se scrie sub forma :
) a J ... a J (
k
a a 0 ) a a ( k a J a J
1 1 o o
2
2
1 2 2 1 2
2
0 o
2
1 1
+ +
= = +
n general : ) a J ........ a J (
k
a a
i i o o
1 i
2
i 1 i
+ +
=
+
+
Se impune 1 a
o
= i se calculeaz succesiv amplitudinile
n 3 2
a ,..., a , a .
Dac este o pulsaie proprie, atunci: 0 a J
i
n
0 i
i
=
=
.
n caz contrar suma este diferit de zero.
Se evalueaz suma
i
n
0 i
i
a J
=
pentru diferite pulsaii .
Se reprezint grafic variaia sumei n funcie de . Punctele n care curba
intersecteaz axa absciselor corespund pulsaiilor proprii.
nlocuind valorile determinate ale pulsaiilor proprii n ultimele relaii gsim
modurile proprii de vibraii.
2.6.3. Metoda matricelor de transfer
Metoda matricelor de transfer este utilizat atunci cnd micarea fiecrei mase
concentrate din sistem este descris de variaia unei singure coordonate. S
considerm un sistem format de n mase concentrate, legate prin elemente elastice,
care execut vibraii armonice cu pulsaia , pe direcia x (fig. 2.36).
57
Dac se izoleaz din sistem masa
i
m , ecuaia de echilibru se scrie:
Fig. 2.36
j j
x m & & =F
D
j
- F
S
j
Dar:
j
2
j
x x = & &
D
j
F = F
S
i
-
j j
2
x m
Masa fiind rigid, deplasrile la stnga i la dreapta sunt egale:
=
j j
2 S
j
D
j
S
j
D
j
x m - F = F
x x
Ultimele ecuaii se scriu matricial:
D
j j
2
D
j
F
x
1 m
0 1
F
x
)
`
=
)
`
Dac se izoleaz arcul
j
K , considerat c acesta nu are mas, putem scrie:
F
S
j
=F
D
1 j
Deplasarea relativ a capetelor arcului are expresia:
X
S
j
- X
D
1 j
=
j
D
1 j
k
F
+ =
D
1 - j
S
j
j
D
1 j D
1 j
S
j
F = F
k
F
X X
Sub form matricial ultimele ecuaii se pot scrie:
D
1 j
j
S
j
F
x
1 0
k
1
1
F
x
)
`
(
(
=
)
`
Matricea coloan { }
j
j
z
F
x
=
)
`
se numete vector de stare n punctul j,
componentele lui fiind deplasarea punctului j i fora corespunztoare din arc.
Matricele:
| |
j
2
j
1 m
0 1
P
(
=
; | |
j
j
1 0
k
1
1
F
(
(
=
58
care stabilesc legtura dintre doi vectori de stare adiaceni, se numesc matrici de
transfer.
Cu aceste notaii, putem scrie:
{ } | | { }
{ } | | { }
{ } | | | | { }
D
1 j j j
D
j
D
1 j j
s
j
S
j j
D
j
z F P z
z F z
z P z
=
=
Sau:
D
1 j
i
2
2
D
j
F
x
k
m
1 m
k
1
1
F
x
)
`
(
(
(
=
)
`
Astfel, alegnd un vector de stare { }
j
z n punctul j i o valoare pentru
2
, se
poate calcula pas cu as vectorul de stare { }
n
z n punctul n.
2.7. Vibraiile sistemelor continue
Sistemele oscilante cu un numr finit de grade de libertate studiate n cursurile
precedente, sunt caracterizate de existena unor mase rigide, concentrate n anumite
puncte ale sistemului i a unor elemente elastice de legtur, fr mas.
n unele sisteme mecanice masele elementelor elastice sunt comparabile cu
masele considerate rigide. n micarea vibratorie a acestor sisteme forele de inerie
sunt repartizate continuu.
Pentru descrierea micrii acestor sisteme, sunt necesare funcii care s indice
variaia n timp a deplasrii n fiecare punct din sistem, deci funcii de timp i de
punct. Modelul teoretic ataat unui astfel de sistem fizic are un numr infinit de
grade de libertate i se numete sistem continuu.
Numrul frecvenelor proprii ale unui sistem este egal cu numrul gradelor de
libertate, deci un sistem continuu are un numr infinit de frecvene proprii.
n majoritatea cazurilor, un sistem continuu va vibra cu o amplitudine mare
numai la un numr limitat de frecvene proprii, n mod obinuit la frecvenele cele
mai joase, i cel mai adesea numai la frecvena cu valoarea cea mai mic, numit i
frecven fundamental.
Fiecrei frecvene i corespunde o form de vibraie numit mod normal sau
propriu de vibraie. Sisteme continue simple pot fi considerate barele, grinzile, plcile
etc. Barele pot efectua vibraii de rsucire, vibraii longitudinale (axiale) i vibraii
transversale (de ncovoiere).
n cazul general, aceste vibraii sunt cuplate, frecvenele proprii i deplasrile
pe diferite direcii condiionndu-se reciproc.
n continuare vom trata cteva cazuri particulare de bare, pentru care cele trei
tipuri de vibraii sunt decuplate.
59
2.7.1. Vibraiile longitudinale ale barelor drepte
S considerm o bar prismatic de seciune A i lungime l, n vibraie
longitudinal, din care se detaeaz un element de lungime dx (fig. 2.37).
Asupra acestui element lucreaz eforturile din cele dou seciuni: N i
N+ dx
x
N
, fora de inerie dF i o for excitatoare distribuit, F
o
(x,t)dx.
Fig.2.37
Condiia ca elementul de bar s fie n echilibru dinamic este dat de ecuaia de
proiecie pe direcia axei barei:
N +
x
N
dx N + F
o
(x,t)dx = dF de unde rezult:
x
N
+ F
o
(x,t) =
x
F
n continuare, se exprim efortul N i fora de inerie pe unitatea de lungime
x
F
n funcie de deplasarea longitudinal u(x,t):
N = A = A.E. = A E
x
u
x
F
= A
2
2
t
u
Rezult : A
2
2
x
u
+ F
o
(x,t) = A
2
2
t
u
n cazul vibraiilor libere, la t = 0 avem urmtoarele condiii iniiale:
u(x,0) = f(x) ;
t
u
t =0
= g(x)
Condiiile la limit se deduc din modulul de prindere al barei la capete:
a) pentru bara liber la ambele capete:
N(0,t) = A
x
u
x = 0
= 0
x
u
x = o
= 0
N(l,t) = A
x
u
x = l
= 0
x
u
x = l
= 0
b) pentru bar fixat la ambele capete:
u(0,t) = 0 i u(l,t) = 0
60
c) pentru bar fixat la x = 0 i liber la x = l:
u(0,t) = 0 i N(l,t) = A
x
u
x = 0
= 0
Pulsaii proprii, funcii proprii
Pentru determinarea pulsaiilor proprii i a funciilor proprii se rezolv ecuaia
vibraiilor libere, considernd F
o
(x,t) = 0. Rezult:
AE
2
2
x
u
= A
2
2
t
u
E
2
2
x
u
=
2
2
t
u
Soluia ecuaiei difereniale se caut de forma:
u(x,t) = X(x).T(t) n care: T(t) = Bsin(t + )
X(x) = Csin x + Dcos x
Dac se nlocuiete u(x,t), n ecuaia diferenial, se obine:
-
E
T(t)
2
X(x) = -
2
X(x) T(t)
E
2 2
=
Constantele B i se determin din condiiile iniiale, iar constantele C i D
se determin din condiiile la limit. Exist o infinitate de pulsaii proprii
n
i deci o
infinitate de moduri proprii de vibraie, a cror ecuaie are forma:
u
n
(x,t) =
) t sin( ) x
E
cos D x
E
sin C ( B
n n
n
n
n
n n
+
Soluia general a ecuaiei difereniale, pentru condiii iniiale oarecare, se obine
suprapunnd toate modurile de vibraie:
u
n
(x,t) =
=
+
1 n
n n
n
n
n
n n
) t sin( ) x
E
cos D x
E
sin C ( B
n cazul vibraiilor torsionale, ale unei bare drepte, ecuaiile de micare sunt
similare cu cele obinute la vibraiile longitudinale ale barelor drepte i se pot scrie
direct fcnd corespondena:
u
GI
p
J
M
t
N
Deci ecuaia vibraiilor libere de rsucire ale barelor drepte, de seciune circular,
este:
GI
p
2
2
x
= J
2
2
t
a crei soluie este de forma:
(x,t) = X(x) T(t)
61
Aplicaie:
1. S se determine pulsaiile proprii ale vibraiilor longitudinale libere ale unei
bare drepte de seciune constant, avnd capetele libere (fig. 2.37).
Condiiile la limit sunt:
x
u
x = 0
= 0 i
x
u
x = l
= 0
dx
dX
x = 0
= 0 i
dx
dX
x =1
= 0
Dar :
dx
dX
= (Ccos x - Dsin x)
Pentru : x = 0 C = 0
x = l D sin l = 0 l = n =
l
n
Rezult: X
n
(x) = Dcos
l
n
Dac se consider constanta B egal cu amplitudinea maxim realizat de bar,
rezult D = 1 i deci:
X
n
(x) = cos
l
n
x , n = 1,2,
Pulsaia proprie
n
, pentru care vibraia liber are forma dat de funcia X
n
(x),
este:
n
=
E
l
n E
n
n = 1,2,
Micarea vibratorie n care deplasarea este de forma:
u(x,t) = A
n
cos
l
n
sin(
n
t + n) se numete mod propriu de vibraie.
2. S se determine pulsaiile proprii ale vibraiilor de rsucire, ale unei bare de
seciune circular, cu diametrul de d i de lungime l, avnd captul din stnga ncastrat,
iar cel din dreapta liber. Condiiile la limit sunt:
Fig.2.38
1
=
l 2
J
GI
p
f
1
= /2, f
2
= 3f
1
, f
3
= 5f
1
, ...
3. S se determine ecuaia pulsaiilor proprii a vibraiilor longitudinale ale unei
bare de seciune constant A i lungime l, ncastrat la un capt i avnd o mas
concentrat m la captul liber (fig. 2.39).
x = 0 = 0 X = 0 D = 0
x = l M = GI
p
x
u
= 0
x
u
= 0 X
= 0
cos
J
GI
l
p
n
= 0
J
GI
l
p
n
=
2
,
2
3
,
2
5
,
62
E,A,
l
Fig.2.39
Condiiile la limit sunt:
u
x = 0
= 0 X
(0)
= 0 D = 0
- m
2
2
t
U
x = l
=
x
u
x = l
m
2
u
x = l
=
x
u
x = l
m
2
Csin l = cos l (l) tg l =
m
Al
Am obinut ecuaia pulsaiilor proprii, o ecuaie transcendent, care se rezolv
numeric.
2.7.2. Vibraiile transversale ale barelor drepte
S considerm bara din figura 2.40, la care am notat cu x axa barei, cu y direcia de
micare i cu z axa neutr a seciunii. Ecuaia fibrei medii, din cursul de rezistena
materialelor, are forma :
x
y l
Fig.2.40
Dac se deriveaz ecuaia fibrei medii de dou ori n raport cu x i utiliznd
relaiile difereniale ntre eforturi se obine:
( )
( ) x T
dx
x dM
= ;
( )
( ) x p
dx
x dT
= ;
z
4
4
EI
) x ( p
dx
) x ( y d
=
unde p(x) este sarcina distribuit pe unitatea de lungime a grinzii.
Se noteaz cu y(x,t) deplasrile grinzii fa de poziia de echilibru static,
efectuate n timpul vibraiilor transversale. Sarcina distribuit p(x) este format din
forele de inerie pe unitatea de lungime, egale cu - A
2
2
t
y
i din forele perturbatoare
p
o
(x,t), distribuite pe unitatea de lungime a barei, astfel nct ncrcarea grinzii este dat
de:
2
2
dx
y d
=
z
EI
) x ( M
unde M(x) este momentul ncovoietor n
seciunea x, iar EI
z
reprezint rigiditatea la
ncovoiere a barei.
m
63
p(x) = - A
2
2
t
y
+ p
o
(x,t)
Grinda fiind n echilibru dinamic, trebuie s satisfac ecuaia:
| |
(
= ) t , x ( p
t
y
A
EI
1
) t , x ( y
dx
d
o
2
2
z
4
4
( )
z
o
2
2
z
4
4
EI
t , x p
t
y
EI
A
x
y
=
Forma ecuaiei de micare este stabilit cu neglijarea efectelor rotirii i lunecrii
seciunii.Funcia y(x,t) trebuie s satisfac att condiiile iniiale:
y(x,0) = f(x) i
t
y
t = 0
= g(x)
ct i condiiile la limit determinate de modul de rezemare.
Condiiile la limit cele mai uzuale sunt:
a) ncastrare rigid la x = x
o
:
sgeata este nul: y(x
o
,t) = 0
rotirea este nul:
t
y
x = xo
= 0
b) reazem simplu rigid la x = x
o
:
sgeata este nul : y(x
o
,t) = 0
momentul M(x
o
,t) este nul:
2
2
x
y
x = xo
= 0
c) capt liber la x = x
o
:
fora tietoare T(xo,t) este nul:
3
3
x
y
x = xo
= 0
momentul M(x
o
,t) este nul:
2
2
x
y
x = xo
= 0
d) ncastrare elastic la x = x
o
:
sgeata este nul: y(x
o
,t) = 0
momentul M(x
0
,t) este proporional cu rotirea
seciunii : EI
z
2
2
x
y
x = xo
= k
x
y
x = xo
e) reazem simplu elastic la x = x
o
:
sgeata este proporional cu reaciunea din reazem:
- EI
z
2
2
x
y
x = xo
= k y(x
o
,t )
momentul M(x
0
,t) este nul :
2
2
x
y
x = xo
= 0
64
Pulsaii proprii, funcii proprii
n cazul vibraiilor libere, forele perturbatoare p
o
(x,t) = 0 i ecuaia vibraiilor
transversale devine:
0
t
y
EI
A
x
y
2
2
z
4
4
=
Aceast ecuaie admite o soluie armonic de forma:
y(x,t) = BY(x)sin(t + ) n care:
Y(x) este o funcie numai de x.
Dac se nlocuiete soluia n ecuaie obinem:
) t sin( Y
EI
A
) t sin(
dx
Y d
2
z
4
4
+
= +
Se noteaz:
4
2
z
EI
A
=
4
4
dx
Y d
=
4
Y
Soluia general a acestei ecuaii difereniale este dat de o sum de funcii
independente de forma:
Y(x) = C
1
sin x + C
2
cos x + C
3
tg x + C
4
ctg x
Soluia poate fi exprimat i prin termeni formai din funcii exponeniale, ns
funciile trigonometrice i hiperbolice sunt, de obicei mai uor de utilizat.
Constantele C
1
, C
2
, C
3
, C
4
se determin din condiiile la limit.
Pentru facilitarea calculelor, este convenabil ca funcia Y(x) s fie scris sub
forma:
Y(x) = C
1
(sin x + sh x) + C
2
(sin x - sh x) + C
3
(cos x + ch x) +
+ C
4
(cos x - ch x)
n acest caz, dou din cele patru constante sunt nule pentru fiecare din condiiile
la limit obinuite. Dac
n
este o pulsaie proprie, atunci forma deformat a grinzii,
care vibreaz armonic cu pulsaia
n
, este dat de funcia proprie Y
n
(x),care determin
modul propriu de vibraie de ordinul n i este:
y
n
= B
n
Y
n
(x)sin(
n
t +
n
)
Constantele B
n
i
n
se determin din condiiile iniiale.
Micarea barei n caz general este dat de o funcie obinut prin suprapunerea
modurilor proprii de vibraie: y(x,t) =
=
+
1 n
n n n n
) t sin( ) x ( Y B
Aplicaie:
S se determine frecvenele proprii i modurile proprii de vibraii, ale unei grinzi
de oel, de seciune dreptunghiular bxh (fig.2.40).
Condiiile la limit sunt:
y(0,t) = 0 Y(0) = 0
x = 0
x
y
x = 0
) 0 ( Y = 0
65
M = 0
2
2
x
y
x = l
= 0 0 ) l ( Y =
x = l
T = 0
3
3
x
y
x = l
= 0 0 ) l ( Y =
Y(0) = 0 C
3
= 0
x = 0
0 ) 0 ( Y = C
1
= 0
0 ) l ( Y = C
2
(- sin l sh l) + C
4
(- cos l ch l) = 0
x = l
0 ) l ( Y = C
2
(- cos l ch l) + C
4
(- sin l sh l) = 0
Am obinut un sistem omogen de dou ecuaii cu dou necunoscute care admite
soluii diferite de soluia banal dac = 0.
=
l sh l sin - l ch l cos
l ch l cos l sh l sin
+ +
+ +
Dezvoltnd determinantul obinem ecuaia pulsaiilor proprii:
cos
2
l l + cos l ch l + ch
2
l + sin
2
l - sin l sh l + sin l sh l sh
2
l = 0
Rezult: cos l .ch l = 1
Am obinut o ecuaie transcendent care are o infinitate de soluii i care se
rezolv numeric.
Dac se noteaz cu:
1
l,
2
l, ... soluiile ecuaiei transcendente, atunci se obin
pulsaiile corespunztoare din relaia:
A
EI
2
n n
=
Pentru =
1
se obine primul mod propriu de vibraie:
y
1
(x,t) = B
1
[(cos
1
x ch
1
x) 0.7341(sin
1
x - sh
1
x)] cos (
1
t + )
O ecuaie similar se obine pentru fiecare mod propriu de vibraii.
2.8. Metode aproximative pentru studiul vibraiilor sistemelor continue
Rezolvarea problemelor de vibraii la sistemele continue, prin metoda clasic,
este de multe ori laborioas, mai ales atunci cnd sistemele elastice sunt complicate.
Pentru determinarea pulsaiilor proprii i a funciilor proprii, au fost dezvoltate o
serie de metode aproximative bazate pe principii energetice, sau pe rezolvarea
aproximativ a ecuaiilor de micare. Cele mai utilizate metode sunt: metoda Rayleigh
i metoda Ritz, care este o perfecionare a primei metode.
66
2.8.1. Metoda Rayleigh
Metoda Rayleigh este utilizat pentru determinarea aproximativ a frecvenei
proprii fundamentale. n cazul vibraiilor libere, dup un mod propriu de vibraii, la
sistemele conservative, energia total a sistemelor se conserv n timpul micrii i deci
energia cinetic maxim este egal cu energia potenial maxim:
. const E E E
p c mec
= + = =>
max p max c
E E =
Pentru calculul energiilor cinetice i poteniale ale barelor drepte, se folosesc
urmtoarele relaii, din cursul de rezistena materialelor:
bar dreapt n vibraie liber longitudinal:
|
.
|
\
|
=
l
o
2
p
dx
x
u
) x ( A
2
E
E
|
.
|
\
|
=
l
o
2
c
dx
t
u
) x ( A
2
E
bar dreapt n vibraie liber de rsucire:
|
.
|
\
|
=
l
o
2
p p
dx
x
) x ( I
2
G
E
|
.
|
\
|
=
l
o
2
p c
dx
t
) x ( I
2
E
bar dreapt n vibraie liber de ncovoiere:
|
|
.
|
\
|
=
l
o
2
2
2
p
dx
x
y
) x ( I
2
E
E
|
.
|
\
|
=
l
o
2
c
dx
t
y
) x ( A
2
E
n cazul unei bare n vibraie transversal, legea de micare este o funcie de
forma: ) t sin( ) x ( Y ) t , x ( y + =
n care Y(x) reprezint curba medie deformat a barei, care este necunoscut.
dx
x
Y
I ) t ( sin
2
E
dx
x
y
) x ( I
2
E
E
l
o
2
2
2
2
2
2
2
l
0
p
|
.
|
\
|
+ = |
.
|
\
|
=
dx Y ) x ( A ) t ( cos
2
dx
t
y
) x ( A
2
E
l
o
2 2
2
2
l
0
c
+
=
|
.
|
\
|
=
Rezult :
|
.
|
\
|
=
l
o
2
2
2
max p
dx
x
Y
I
2
E
E
=
l
o
2
2
max c
dx Y ) x ( A
2
E
67
max p max c
E E = =>
|
|
.
|
\
|
=
l
o
2
l
0
2
2
2
2
dx Y ) x ( A
dx
x
Y
) x ( I E
ntruct funcia Y(x) este necunoscut, se alege o funcie aproximativ care
trebuie s satisfac condiiile la limit. Ca funcie aproximativ se poate lua funcia
care d deformaia barei datorit greutii proprii.
Metoda Rayleigh este o metod cu care se obine o aproximaie n plus.
Metoda poate fi aplicat n cazul general al barelor de seciune variabil, la
care aria seciunii A i momentul de inerie I sunt funcie de x.
Aplicaie. S se calculeze frecvena proprie fundamental a unei bare ncastrate
la un capt i liber la captul opus (fig. 2.40).
Ecuaia care d deformaia static a barei consol, sub o sarcin uniform
distribuit este:
) l x 6 l x 4 x (
l 3
Y
Y
2 2 3 4
4
o
+
=
Aceast ecuaie satisface condiiile la limit:
x = 0 =>
= = =
= = =
0 ) 0 ( Y 0 ) t , 0 (
0 ) 0 ( Y 0 ) t , 0 ( V
>
>
x = l =>
= = =
= = =
0 ) l ( Y 0 T
0 ) l ( Y 0 M
>
>
Energia potenial maxim este:
= +
=
|
|
.
|
\
|
=
l
o
l
o
2
o
3
2 2
4
o
2
2
2
max p
Y
l
EI
5
8
dx ) l l x 2 x (
l
Y 4
2
I E
dx
x
Y
2
I E
E
Energia cinetic maxim este:
=
(
|
.
|
\
|
+
=
l
o
2
2
o
2
2 2 3 4
4
o 2
max c
AlY
405
52
dx l x 6 l x 4 x (
l 3
Y
2
A
E
Egalnd cele dou energii rezult:
A
EI
l
53 , 3
2
1
=
2.8.2. Metoda Ritz
Metoda Ritz este o metod aproximativ care reprezint o perfecionare a
metodei Rayleigh i este utilizat att pentru calculul pulsaiilor proprii fundamentale
ct i pentru calculul pulsaiilor proprii ale modurilor superioare de vibraie.
Specific metodei Ritz este alegerea funciei Y(x) sub forma:
) x ( a ..... ) x ( a ) x ( a ) x ( Y
n n 2 2 1 1
+ + + =
unde ) x ( ),..., x ( ), x (
n 2 1
sunt funcii de x care satisfac, fiecare n parte, condiiile
la limit ale problemei i care permit determinarea funciei Y(x) ct mai apropiat de
funcia real.
68
n cazul metodei Rayleigh valoarea aproximativ a pulsaiei proprii
fundamentale este superioar valorii reale. Plecnd de la aceast constatare, Ritz a
propus determinarea coeficienilor a
1
, a
2
, ..., a
n
din condiia ca pulsaia proprie s fie
minim, ceea ce nseamn c:
0
a
) a ,...., a , a (
i
n 2 1
2
=
pentru i = 1,2,......,n
Dac sistemul vibreaz dup un mod propriu, atunci toate punctele sale au
deplasri armonice, n faz, iar expresiile energiilor poteniale i cinetice se pot pune
sub forma:
) t ( sin U E
2
p
+ =
) t ( cos K E
2 2
c
+ =
Pentru un sistem conservativ E
pmax
= E
cmax
i rezult: ( K U
2
) = 0
Funcia = K U
2
se numete potenial cinetic. Dac se nlocuiete funcia
Y n expresia lui , aceasta devine o funcie de parametrii a
1
, a
2
, ..., a
n
.
) ,...a a , (a
n 2 1
=
Condiia ca pulsaia proprie s fie minim este ca:
0
a
1
=
, 0
a
2
=
, ... , 0
a
n
=
Am obinut astfel un sistem algebric omogen cu necunoscutele a
1
, a
2
, ..., a
n
.
Pentru ca sistemul s admit soluii diferite de soluia banal trebuie ca
determinantul sistemului s fie nul.
Dezvoltnd acest determinant, obinem ecuaia pulsaiilor proprii.
Alegndu-se funcia Y(x) dintr-un numr de termeni, rezult pulsaiile proprii
pentru un acelai numr de moduri proprii de vibraie.
i n cazul metodei Ritz se determin pulsaiile proprii cu aproximaie n plus.
2.9. Vibraia transversal a barelor cu mase ataate
a) Metoda clasic
Dac se consider c masele ataate de bar sunt rigide i nu exercit fore
elastice i dac se presupune c prinderea este fcut astfel nct s nu mpiedice
ncovoierea barelor, atunci pot fi utilizate ecuaiile de la bare cu seciune constant.
Fiecare poriune de bar dintre dou mase vecine, sau dintre un reazem i masa
adiacent trebuie considerat separat.
Constantele difer pentru fiecare poriune de bar, existnd n total 4n
constante, n fiind numrul de poriuni de bar, n care este mprit bara. Pentru
determinarea constantelor se pun cte dou condiii la limit pentru fiecare reazem i
urmtoarele condiii suplimentare:
sgeata este aceeai pentru seciunile adiacente masei;
rotirea este aceeai pentru fiecare seciune adiacent masei;
69
variaia forei tietoare este egal cu produsul dintre mas i acceleraia sa ) y ( & & ;
variaia momentului ncovoietor este egal cu momentul de inerie al masei
nmulit cu acceleraia sa unghiular:
2
2
t
I
unde:
x
y
=
Stabilire ecuaiilor necesare nu este dificil, ns rezolvarea lor este laborioas.
b) Metoda Rayleigh
Pentru calculul energiei cinetice maxime, la energia cinetic a barei se adaug
energia cinetic a maselor adiionale. Energia cinetic maxim a masei i este:
2
) x ( Y m
E
i
2 2
i
max . ci
=
unde Y(x
i
) este valoarea deplasrii maxime n dreptul masei i.
Energia potenial maxim se calculeaz ca n cazul barelor fr mase
adiionale. Dac se egaleaz energia potenial maxim cu energia cinetic a barei,
plus energia cinetic maxim a maselor, se obine relaia:
=
+
|
.
|
\
|
=
l
o
n
1 i
i
2
i
2
2
l
o
2
2
2
) x ( Y m dx Y A
dx
x
Y
EI
unde Y(x) este sgeata maxim. Dac Y(x) s-ar cunoate exact, ecuaia ar da valoarea
exact a pulsaiei fundamentale.
Deoarece Y(x) este necunoscut se adopt o funcie aproximativ, care trebuie
s satisfac condiiile la limit.
De regul se ia funcia care d forma vibraiei barei nencrcate, sau funcia
care d sgeata static a barei sub greutatea proprie.
b) Bar cu seciune transversal variabil
Principial, calculul exact poate decurge la fel ca la barele cu seciune constant,
cu observaia considerrii produsului EI variabil.
Valorile aproximative ale pulsaiilor proprii ale barelor de seciune variabil se pot
determina cu metoda Rayleigh sau Ritz, considernd seciunea barei variabil A(x).
|
.
|
\
|
=
l
o
2
2
l
o
2
2
2
dx Y ) x ( A
dx
x
Y
) x ( I E
Dac bara este executat n trepte, atunci energia cinetic i potenial se poate
calcula separat pentru fiecare treapt, iar n final se obine energia total prin
nsumare.
70
Aplicaie. S se calculeze frecvena proprie a vibraiilor transversale ale unei
bare simplu rezemate, de lungime l, de seciune dreptunghiular bxh, avnd o mas
concentrat la mijloc (fig. 2.41).
Fig. 2.41
Metoda clasic
Din cauza simetriei, pentru obinerea soluiei exacte, se poate considera numai
poriunea din bar din stnga masei. Condiiile la limit pentru captul din stnga
barei sunt:
x = 0
= = =
= = =
0 C 0 Y
0 C 0 Y
4
3
>
>
+ + + + + = ) x ch x (cos C ) x sh x (sin C ) x sh x (sin C Y
3 2 1
) x ch x (cos C
4
+
La dreapta masei, din cauza simetriei, fora tietoare are aceeai mrime, dar cu
semn schimbat. Diferena dintre forele tietoare din cele dou seciuni adiacente
masei, trebuie s fie egal cu produsul dintre mas i acceleraia sa:
max
y m Y EI 2 & & =
Dac se consider soluia ) t sin( Y y + = rezult: Y y
2
max
= & & i ecuaia
devine: Y m Y EI 2
2
=
Din cauza simetriei barei, rotirea la mijloc este nul. Pentru simplificarea
calculelor, funcia y(x) o vom scrie sub forma:
x sh C x sin C x sh ) C C ( x sin ) C C ( ) x ( y
2 1 2 1 2 1
+ = + + =
Rezult c pentru x =l/2 avem condiiile:
= =
0 )
2
l
ch C
2
l
cos C (
)
2
l
sh C
2
l
sin C ( m )
2
l
ch C
2
l
cos C ( EI 2
0 Y
2 1
2 1
2 3
2
3
1
>
Dac se pune condiia ca = 0 rezult :
|
.
|
\
|
=
2
l
th
2
l
tg
2
l
m
m 2
b
unde Al m
b
=
Am obinut ecuaia transcedent a pulsaiilor proprii.
Metoda Rayleigh
Pentru rezolvarea problemei prin metoda Rayleigh se consider funcia
aproximativ : Y(x) = Bsin x/l
care reprezint modul fundamental de vibraie pentru bara nencrcat.
71
=
|
.
|
\
|
= |
.
|
\
|
l
0
4 2 2
4
2
2
l
o
2
2
)
l
(
2
l
B dx
l
x
sin
l
B dx
x
Y
2 2 2 2
B
2
l
l
sin B ) 2 / l ( Y =
=
> =
=
+
|
.
|
\
|
=
4
b
2
2
2
4
2
1
l A
EI
m
m
2 1
mB
2
l B A
l 2
l
EIB
1
Metoda Ritz
Pentru construirea funciei Y(x) se pot utiliza funcii de forma
l
x n
sin ) x (
n
= cu n = 1,2,... care satisfac condiia la limit pentru bara simplu
rezemat. Pentru a determina primele dou pulsaii se consider o combinaie liniar
de dou funcii :
l
x 2
sin a
l
x
sin a ) x ( a ) x ( a ) x ( Y
2 1 2 2 1 1
+
= + =
| | dx ) x ( Y
l
EI
E
2
l
0
max p
= iar
2
l
0
2 2
max c
) 2 / l ( Y
2
m
dx ) x ( Y
2
A
E
(
=
Potenialul cinetic :
(
+
(
|
.
|
\
|
+
= =
2
3
4
2
2
2
3
4
2
1 max c max p
4
Al
l
EI 4
a
2
m
4
Al
l 4
EI
a E E
= =
= =
>
>
0
a
0
a
2
1
0
4
Al
l
EI 4
a 2
0
2
m
4
Al
l 4
EI
a 2
2
3
z
4
1
2
3
z
4
1
=
(
=
(
|
.
|
\
|
+
Al
EI 16
m
2
Al
l 2
EI 4
z
4
2
3
z
2
1
= =
|
.
|
\
|
+
= =
>
>
2.10. Vibraii neliniare
n general, modelul matematic ataat unei probleme fizice reale conduce la o
reprezentare matematic foarte complicat. Primul pas care se face n rezolvarea
modelului este liniarizarea sistemului. Pentru foarte multe situaii ntlnite n practic,
ipotezele teoriei liniare sunt justificate, rezultatele teoretice fiind n suficient
concordan cu cele experimentale.
=
=
l
0
2 2 2
l
0
2
2
l
B dx
l
x
sin B dx Y
72
n multe cazuri, analiza liniar este insuficient pentru descrierea adecvat a
comportrii sistemelor fizice, aceast insuficien derivnd din existena n sistemul
fizic considerat a unor neliniariti, suficient de puternice, pentru a provoca
modificarea calitativ a rspunsului sistemului fizic fa de rspunsul modelului
liniar. n asemenea cazuri este necesar considerarea n modelul matematic i a
neliniaritilor respective, ceea ce introduce dificulti uneori considerabile, n
rezolvarea problemelor.
Caracteristic pentru teoria vibraiilor mecanice neliniare este varietatea mare de
neliniariti posibile ntr-un sistem elastic, fiecare conducnd la alt tip de ecuaie de
micare. Puine din aceste ecuaii se pot rezolva exact.
Pentru cea mai mare parte a problemelor neliniare nu se pot determina soluii
generale, ci doar soluii particulare, corespunztoare numai unor anumite condiii
iniiale. Exist metode aproximative de rezolvare care sunt valabile pentru anumite
tipuri de ecuaii, implicnd n acelai timp utilizarea unor elemente matematice
complexe i dificile. De aceea vom prezenta doar unele aspecte introductive ale
teoriei vibraiilor neliniare, pentru sisteme cu un grad de libertate.
2.10.1. Neliniariti n sisteme elastice
Neliniaritile n sistemele elastice pot fi determinate de:
a) Caracteristica elastic neliniar a elementului elastic;
b) Amortizarea neliniar ;
c) Caracteristicile mecanice variabile n timp ale elementelor sistemului.
a)Sisteme cu caracteristic elastic neliniar
Caracteristica elastic neliniar a elementului elastic poate fi datorat unor
neliniariti fizice sau geometrice.
Fig. 2.42
mx& & +k( x
2
x
3
) = 0
Semnul plus se refer la caracteristica rigid, iar semnul minus la caracteristica
moale.
Elementele elastice din cauciuc, font,
cupru, pot avea curba caracteristic neliniar
progresiv (rigid) (fig. 2.42.a) sau descresctoare
(moale) (fig. 2.42.c).
La arcul elicoidal simplu, apare o abatere de
la curba caracteristic liniar (fig. 2.42.b), n cazul
unor sgei mari, cnd spirele ncep s se ating,
sau atunci cnd spirele ncep s-i piard
proprietile elastice iniiale.
Un sistem elastic care are curba caracteristic
moale sau rigid, poate fi analizat pe baza unei
ecuaii difereniale neliniare de forma:
73
Neliniaritile geometrice sunt datorate n general particularitilor
constructive ale sistemelor elastice i sunt puse n eviden n cazul deformaiilor
mari. Cele mai simple sisteme elastice neliniare, care au neliniariti geometrice, sunt
sistemele cu joc i sistemele cu fore de prestrngere.
Fig. 2.43
Fig. 2.44
n general, caracteristicile elastice neliniare sunt date de o functie F(x).
Ecuaia micrii libere a unui sistem cu caracteristic elastic neliniar F(x)
se poate pune sub forma general: 0 ) x ( F x m = + & &
Sisteme cu amortizare neliniar
Amortizarea liniar este caracterizat de apariia n sistem a unei fore
rezistente, proporional cu viteza de deplasare i opus acesteia ca semn:
x c ) x ( F
c
& & =
Uneori ipoteza liniaritii forelor de frecare nu este satisfctoare i pentru a
descrie analitic fenomenele fizice, amortizarea trebuie prezentat ca o funcie
neliniar de amplitudinea micrii i de viteza ei.
n ecuaia de micare apare un termen de forma:
G(x, x& ) = h
o
(x)+h
1
(x). x& +h
2
(x). x&
2
Un element elastic neliniar este i arcul
conic (fig. 2.43), a crui caracteristic rmne
liniar pn cnd primele dou spire vin n
contact. Deoarece contactul dintre spire nu se
realizeaz simultan pentru toate spirele, ca la
arcul cilindric, elementul rmne deformabil
i dup ce spirele vin n contact, dar
caracteristica n ansamblu nu mai este liniar.
n cazul sistemului cu joc prezentat n
figura 2.44, masa m se poate deplasa fr
frecare pe un plan orizontal, fiind legat de
suportul fix prin arcurile cu constant k
1
.
Dac masa depete n micarea sa
punctele x
1
i x
3
, la fora elastic dezvoltat
de arcul k
1
se adun fora elastic
dezvoltat de arcurile k
2
, rigiditatea
sistemului modificndu-se.
Sistemul rmne liniar att timp ct
condiiile iniiale asigur o micare liber
ntre punctele x
1
i x
3
i devine neliniar la
amplitudini 0x
2
ale micrii, mai mari dect
valoarea jocului. n acest caz micarea nu
mai este armonic n ansamblul ei, iar
perioada micrii este funcie de
amplitudine.
74
Dac x& .G(x, x& ) > 0, atunci fora rezistent se opune micrii, rezistena se
numete pozitiv. Dac x& G(x, x& ) < 0, fora creat de micare este dirijat n sensul
vitezei i ntreine micarea, rezistena se numete negativ, iar vibraiile se numesc
autoexcitate sau autontreinute.
Vibraiile autoexcitate apar la prelucrarea prin achiere i pot fi studiate cu
ajutorul modelului format dintr-o mas, care se deplaseaz sub aciunea forei
elastice, forei de frecare i a forei de inerie, pe o curea care are vitez constant
(fig. 2.45).
Fig. 2.45
Sistemul prezint o neliniaritate care depinde de frecarea uscat dintre masa
m i cureau aflat n micare cu viteza v=const. Ecuaia de micare a masei m este de
forma: mx& & +G(x, x& )+kx=0;
n cursul unei oscilaii, pentru amplitudini sub o anumit valoare, apar
amortizri negative. Ct timp lucreaz forele de frecare negative, n sistem se
introduce energie, iar amplitudinea vibraiei crete pn cnd aceste fore devin
pozitive i ncep s frneze micarea. Un astfel de fenomen poate fi descris de
funcia: G(x, x& )= (x
2
-
2
) x& cu: >0
Ct timp x
2
<
2
, rezistena este negativ i amplitudinea crete pn cnd
x
2
>
2
. Din acest moment amortizarea devine pozitiv i limiteaz creterea
amplitudinilor. n cazul general, ecuaia de micare, pentru vibraiile sistemelor
elastice cu amortizare neliniar, va fi de forma:
mx& & +G(x, x& )+F(x) =F
p
(t)
Sisteme cu caracteristici mecanice variabile
n sistemele liniare i neliniare considerate pn acum, masa n micare i
rigiditatea elementelor deformabile nu depind explicit de timp. n cazul sistemelor
neliniare, considerate pn acum, rigiditatea i amortizarea se modificau n timp, dar
variaia lor n timp era funcie de elongaie i de viteza micrii.
Exist, ns, sisteme mecanice n care fie caracteristicile ineriale (masa,
momentul de inerie masic), fie caracteristicile elastice sunt funcii periodice de timp
independente de amplitudine sau viteza micrii vibratorii.
De exemplu, n cazul unui arbore elastic, cu seciunea necircular, aflat n
micare de rotaie (fig. 2.46), poziia axelor principale de inerie se modific periodic
fa de direcia vibraiilor transversale.
75
Fig. 2.46
Dac se noteaz cu viteza de rotaie, momentul de inerie I
z
al seciunii fa
de axa z perpendicular pe direcia micrii vibratorii y, se modific periodic cu
pulsaia 2, dup legea:
t 2 cos
2
I I
2
I I
I
2 1 2 1
z
+
+
=
unde I
1
i I
2
sunt momentele de inerie principale ale seciunii.
n mod corespunztor se modific i rigiditatea arborelui:
k = k
o
+k cos t;
astfel c ecuaia vibraiilor de ncovoiere, excitate pe direcia y de forele de inerie
neechilibrate F
o
sint, devine:
my& & +(k
o
+ k cos 2t )y = F
o
sint;
Variaia n timp a caracteristicilor ineriale, deci a coeficientului acceleraiei,
nu schimb calitativ forma ecuaiei, deoarece, prin mprirea ntregii ecuaii cu un
coeficient, aceasta se pune sub forma:
( ) ( ) t F x t k x
p
= + & &
Ecuaia este similar cu cea obinut pentru sistemele cu caracteristici elastice
variabile n timp. Vibraiile descrise de aceast ecuaie se numesc vibraii
parametrice.
2.10.2. Fenomene caracteristice vibraiilor neliniare
a) Vibraiile neliniare sunt neizocrone: perioada T a micrii vibratorii libere
depinde de amplitudine. Pentru sistemele fr amortizri, cu caracteristic elastic
moale, perioada crete cu creterea amplitudinii, iar pentru cele cu caracteristic tare,
perioada scade cu creterea amplitudinii.
b) Curbele de rspuns, pentru vibraiile forate ale sistemelor neliniare, au o
form asemntoare cu cele ale sistemelor liniare, dar sunt nclinate spre dreapta sau
stnga, dup cum caracteristica sistemului este moale (fig. 2.47.a) sau rigid (fig.
2.47.b).
c) Stabilitatea micrii
Din punct de vedere fizic, un sistem elastic este static stabil dac printr-o
deplasare mic din poziia de echilibru se creeaz fore care l aduc la starea iniial.
Sistemul este dinamic stabil dac amplitudinea micrii sale n jurul poziiei
de echilibru rmne limitat. Stabilitatea dinamic implic ntotdeauna stabilitatea
static, reciproca nefiind adevrat.
76
a) b)
Fig. 2.47
Sistemele elastice neliniare, excitate armonic, pot avea micri periodice
instabile, a cror instabilitate se manifest nu prin creterea continu n timp a
amplitudinii, ci prin modificarea brusc a parametrilor micrii, la o mic perturbare
a sistemului, fr ca parametrii excitaiei s se modifice.
Acesta este fenomenul de salt, a crui explicaie se gsete n forma
particular a curbelor de rspuns amplitudine - frecven ale sistemelor neliniare.
Dac vom considera un sistem cu caracteristic rigid (fig. 2.47.b), atunci
cnd pulsaia forei perturbatoare crete continuu, amplitudinea vibraiei crete pn
n punctul A (punctul din care se poate duce o tangent vertical la curba
caracteristic).
n continuare o mic cretere a pulsaiei, face ca sistemul s vibreze cu
amplitudine mic (punctul B). Saltul nu este instantaneu, ci are loc dup cteva
cicluri de vibraie, pentru a se stabili o vibraie staionar la noua amplitudine.
Exist o poriune a curbei de rspuns (linia ntrerupt), care nu poate fi
obinut printr-o alegere corespunztoare a pulsaiei excitaiei.
Pentru anumite valori ale lui , teoretic, exist trei amplitudini posibile ale
vibraiei, n realitate putndu-se obine doar amplitudinea superioar i cea
inferioar.
n diagrama de rspuns, este definit zona de instabilitate ca locul geometric al
punctelor de tangen al tangentelor verticale la curba de rspuns (fig. 2.48).
Fig. 2.48
o
X
o
X
o
X
A
B
D
C
d) Dac asupra unui sistem liniar cu
amortizare lucreaz o for perturbatoare
sinusoidal de pulsaie , rspunsul acestuia,
dup amortizarea vibraiei libere, este o micare
armonic avnd aceeai pulsaie ca i
excitaia. ntr-un sistem neliniar, apar
ntotdeauna i vibraii cu pulsaii n (n>1),
multipli ntregi ai pulsaiei excitaiei, numite
supraarmonice , iar n condiii speciale, vibraii
cu submultiplii ai pulsaiei excitaiei (n=1/2, 1/3,
.), numite subarmonice.
77
2.10.3. Metode pentru studiul vibraiilor neliniare
n cazul vibraiilor neliniare se pot obine soluii exacte prin metode analitice
doar pentru un numr relativ mic de ecuaii difereniale neliniare de ordinul al doilea
(sisteme cu caracteristic liniar pe poriuni i cu caracteristic neliniar, fr
amortizri, n vibraie liber.
Orice ecuaie diferenial neliniar, de ordinul al doilea, poate fi integrat
numeric, prin aproximaii succesive, obinndu-se soluia ecuaiei cu orice grad de
precizie dorit, n funcie de numrul de trepte n care se efectueaz calculul.
Metodele numerice sunt aplicabile doar la ecuaiile date, ele neputnd fi
folosite pentru studiul comportrii generale a unui sistem neliniar. Exist un numr
mare de metode analitice aproximative pentru studiul vibraiilor neliniare, fiecare
metod fiind avantajoas pentru anumite clase de probleme.
Aplicaie
1) Calculul exact al perioadei vibraiilor neliniare libere.
S considerm un sistem elastic, cu caracteristic elastic neliniar, aflat n
vibraie liber neamortizat (fig. 2.43).
Ecuaia diferenial neliniar a micrii sistemului are forma:
x& & +f(x) = 0
unde f(x) este o funcie neliniar.
S considerm condiiile iniiale: t = 0
=
=
0 x
a x
&
Pentru integrare se multiplic ecuaia diferenial cux& :
( ) 0 x x f x x = + & & & &
sau: 0 dx ) x ( f
2
x
dt
d x
0
2
=
(
+
&
Integrnd obinem: ; C dx ) x ( f
2
x
1
x
0
2
= +
&
Din condiiile iniiale rezult: C
1
=
a
0
dx ) x ( f
= +
a
0
x
0
2
dx ) x ( f dx ) x ( f
2
x&
sau
= =
a
0
x
0
a
x
2
dx ) x ( f dx ) x ( f dx ) x ( f
2
x&
Deci:
=
a
x
dx ) x ( f 2 x&
n aceast relaie se ia semnul minus pentru prima etap a micrii, deoarece
elongaia scade de la x = a pentru t=0 la x=0. Se poate scrie:
= = =
x
0 a
x
a
x
a
x
dx ) x ( f 2
dx
t
dx ) x ( f 2
dx
dt dx ) x ( f 2
dt
dx
dac se ine seama c la t = 0 avem x = a obinem:
78
= = =
a
x a
x
x
0 a
x
a
0
a
0 a
x
a
x
2
dx ) x ( f 2
dx
dx ) x ( f 2
dx
dx ) x ( f 2
dx
t
dx ) x ( f 2
dx
C
ntruct perioada corespunde la patru deplasri ntre elongaia maxim i
poziia de echilibru rezult:
= =
a
0 a
x
a
0 a
x
dx ) x ( f 2
dx
4 T
dx ) x ( f 2
dx
4
T
Rezult c perioada T depinde de amplitudinea micrii a.
2. S considerm un sistem elastic cu joc (fig.2.44).
S notm cu a
0
deplasarea de la care ncepe s lucreze i arcurile k
2
.
Pentru x a
o
, ecuaia diferenial a vibraiilor libere neamortizate are forma:
mx& & +2k
1
x = 0 , iar soluia acesteia este:
x(t)= A
1
sin
1
t+B
1
cos
1
t n care:
1
=
m
k 2
1
Pentru x a
0
, ecuaia diferenial a micrii este:
( ) ; 0 a x k 2 x k 2 x m
0 2 1
= + + m & &
Soluia general a ecuaiei neomogene este:
x(t)= A
2
sin
2
t+B
2
cos
2
t
o
2 1
2
a
k k
k
+
unde:
2
=
m
) k k ( 2
2 1
+
Dac se presupune c la momentul iniial t = 0 masa m are deplasarea
x(0) = x
0
> a
0
i x& (0) = 0, atunci, punnd condiiile iniiale obinem:
0 A 0 A ) 0 ( x
a
k k
k
x B x a
k k
k
B ) 0 ( x
2 2 2
o
2 1
2
o 2 o o
2 1
2
2
= = =
+
= =
+
+ =
&
Rezult forma particular a soluiei:
x(t)=
o o
2 1
2
2 o
2 1
2
o
a ) t ( x ; a
k k
k
t cos a
k k
k
x
+
+
|
|
.
|
\
|
+
Deplasarea masei m atinge valoarea a
o
pentru timpul t
1
, obinut din condiia:
( )
o o
2 1
2
1 2 o
2 1
2
o 1
a a
k k
k
t cos a
k k
k
x t x =
+
+
|
|
.
|
\
|
+
=
Rezult : t
1
=
o
2 1
2
o
o
2 1
1
2
a
k k
k
x
a
k k
k
arccos
1
+
79
ncepnd din acest moment, deoarece x(t)
o
a ,ecuaia de micare a masei m
se determin din condiia de continuitate a micrii, la timpul t=t
1
:
( )
( ) ( )
|
|
.
|
\
|
+
= =
= + =
1 2 o
2 1
2
o 2 1 1 1 1 1 1 1 1
o 1 1 1 1 1 1 1
t sin a
k k
k
x t sin B t cos A t x
a t cos B t sin A t x
&
Rezolvnd acest sistem algebric, se obin constantele de integrare:
|
|
.
|
\
|
+ =
|
|
.
|
\
|
=
1 1 1 2
2
1 1 o 1
1 1
1 2
2
1
1 1 o 1
t tg t tg 1 t cos a B
t tg
t tg
1 t sin a A
Deplasarea se anuleaz pentru t=t
2
i rezult:
x(t
2
)=A
1
sin
1
t
2
+B
1
cos
1
t
2
= 0
Rezult:
(
(
(
(
=
|
|
.
|
\
|
=
1 1 1 2
2
1
1 1 1 2
2
1
1 1
1
1
2
t tg t tg
t tg t tg 1
arctg
1
A
B
arctg
1
t
Notnd: tg t tg
2
2
1
= , rezult:
( ) | |
(
=
1 1
1
1 1
1
2
t
2
1
t ctg arctg
1
t
Datorit simetriei sistemului, timpul t
2
reprezint a patra parte din perioada T a
micrii:
( )
1
1 1
1
2
t 4 2
t 4 T
= =
Perioada T depinde de amplitudinea x
o
prin intermediul timpului t
1
.
2.11. Metode aproximative pentru studiul vibraiilor neliniare
Exist un numr mare de metode analitice, aproximative, pentru studiul
vibraiilor neliniare, fiecare fiind avantajoas pentru anumite clase de probleme.
Dintre acestea vom prezenta metoda perturbaiei (Poincare) i metoda iteraiei
(Duffing).
2.11.1. Metoda perturbaiei
Metoda perturbaiei este utilizat n mod obinuit pentru studiul vibraiilor
neliniare i permite determinarea soluiilor periodice ale ecuaiilor difereniale ale
80
sistemelor neliniare aflate n vibraie liber sau forat, n cazul unor neliniariti
mici. Soluia ecuaiei difereniale se caut sub forma unor dezvoltri n serie de puteri
ale unui parametru mic . Coeficienii seriei dezvoltate sunt determinai prin calcule
succesive. Metoda este direct, dei necesit calcule greoaie dac se cer muli termeni
ai seriei, pentru a se obine gradul de precizie dorit. Modul de lucru va fi descris
pentru sistemul neliniar cu caracteristic elastic cubic, n vibraie liber:
0 x x x
3 2
o
= + + & & &
pentru care se va determina soluia corespunztoare condiiilor iniiale:
=
=
=
.
0 ) 0 ( x
a ) 0 ( x
0 t
&
Soluia dezvoltat n serie are forma:
... ) t ( x ) t ( x ) t ( x ) t ( x
2
2
1 o
+ + + =
Pulsaia vibraiei,
2
, funcie de amplitudinea micrii este necunoscut i se
dezvolt de asemenea n serie:
... ) a ( ) a ( ) a (
2
2
2 2
1
2
o
2
+ + + =
Se face schimbarea de variabil independent t = , n urma creia, ecuaia
diferenial devine: 0 x x
d
x d
3
2
o
2
2
2
= + +
nlocuind
2
obinem:
| | | | 0 .. ) ( x ) ( x ) ( x ... ) a ( ) a (
3
2
2
1 o
2
2
2
2
1
2
o
= + + + + + + +
Deoarece parametrul este oarecare, coeficienii puterilor lui trebuie s fie nuli:
0 ) ( x
d
x d
:
o
2
o
2
o
2
2
o
o
= +
0 ) ( x
d
x d
) a ( ) ( x
d
x d
:
3
o
2
o
2
2
1 1
2
o
2
1
2
2
o
1
= +
+ +
0 ) ( x ) ( x 3
d
x d
) a (
d
x d
) ( x
d
x d
:
1
2
o
2
o
2
2
2
2
1
2
2
1 2
2
o
2
2
2
2
o
2
= +
+ +
...................................................................................................
Din prima ecuaie rezult x
o
(), care satisface condiiile iniiale, dac are
urmtoarea form:
) cos( a ) ( x
o
=
Introducnd aceast soluie n cea dea doua ecuaie se obine:
) ( cos
a
) cos( a x
d
x d
3
2
o
3
2
o
2
1
1
2
1
2
= +
Dar:
4
) 3 cos( ) cos( 3
) ( cos
3
+
= i se obine:
81
) 3 cos(
4
a
cos a
4
a 3
x
d
x d
2
o
3
2
o
2
2
o
2
1
1
2
1
2
|
|
.
|
\
|
= +
Soluia ) ( x
1
se caut sub forma:
p 2 1 1
x ) cos( C ) sin( C ) ( x + + =
n care
p
x este o soluie particular a ecuaiei difereniale neomogene care se ia sub
forma:
+ =
3
4 3 p
cos C ) sin( C x
Constantele C
3
i C
4
se determin din condiia ca soluia particular s verifice
ecuaia diferenial neomogen, iar constantele C
1
i C
2
se determin din condiiile
iniiale. Punnd aceste condiii obinem:
3
|
|
.
|
\
|
+ + = cos
32
a
sin a
2
4
a 3
cos C sin C ) ( x
2
o
3
2
o
2
2
o
2
1
2 1 1
ntruct a ) 0 ( x
o
= , atunci condiiile iniiale pentru soluia ) ( x
1
trebuie s fie:
0 ) 0 ( x
1
= i 0 ) 0 ( x = astfel c se obine
|
|
.
|
\
|
= sin a
2 4
a 3
) cos 3 (cos
32
a
) ( x
2
o
2
2
o
2
1
2
o
3
1
n aceast soluie, funcia ) ( x
1
nu este periodic, deoarece conine termenul
sin . Din condiia ca acest termen s aib coeficientul nul, se obine a doua
component a pulsaiei:
4
a 3
0
4
a 3
2
2
1
2
o
2
2
o
2
1
= =
Integrnd ecuaiile n continuare se pot calcula orici termeni sunt necesari n
serie, pentru a obine precizia dorit. Dup primele dou integrri, soluia
aproximativ are forma:
t 3 cos
32
a
t cos
32
a
a ) t ( x
2
o
3
2
o
3
+
|
|
.
|
\
|
= unde:
4
a 3
2
2
o
2
+ =
Relaia d, n prim aproximaie, dependena pulsaiei de amplitudine.
Metoda poate fi utilizat i n cazul vibraiilor forate, cnd fora perturbatoare
are pulsaia apropiat de pulsaia proprie a sistemului.
2.11.2. Metoda iteraiei
Metoda este aplicabil de asemenea sistemelor cu neliniariti mici n vibraie
liber sau forat. n principiu, din ecuaia dat se formeaz o ecuaie liniar, prin
82
neglijarea unor termeni. Soluia ecuaiei liniare se introduce n termenii neglijai
iniial i se rezolv din nou ecuaia astfel obinut, pentru a obine o a doua
aproximaie a soluiei. Procesul de iteraie este continuat pn se realizeaz precizia
dorit. Metoda va fi aplicat ecuaiei Duffing, care reprezint vibraia forat a
sistemului cu caracteristic elastic cubic.
t cos q x x x
3 2
o
= + + & & &
Neglijndu-se termenul
3 2
o
x + se ia ca prim aproximaie a soluiei funcia
t cos a x
o
= , n care s-a notat cu a amplitudinea exact a armonicii de ordinul 1,
necunoscut. Se introduce aceast soluie n termenul
3 2
o
x x + , pentru a obine a
doua aproximaie:
t cos q t cos a t cos a x
3 3
2
o 1
= + + & &
4
3 cos cos 3
cos
3
+
=
t 3 cos a
4
1
t cos ) a
4
3
a q ( x
3 3 2
o 1
= & &
Dac se integreaz de dou ori se obine:
2 1
2
3
3
2
o
2
1
C t C t cos
a
36
1
t cos ) a
4
3
a q (
1
x + + 3
= & &
Pentru ca soluia s fie periodic este necesar ca 0 C C
2 1
= = i deoarece n
soluia exact termenul n t cos are amplitudinea a rezult:
a
q
a
4
3
a ) a
4
3
a q (
1
2 2
o
2 3 2
o
2
+ = = + +
A doua aproximaie a soluiei devine:
t cos
a
36
1
t cos a x
3
2
3
1
+ =
Procesul de iteraie poate fi continuat, prin introducerea soluiei x
1
n termenii
neglijai iniial. Metodele iteraiei i perturbaiei nu sunt recomandate pentru
determinarea micrilor n care amplitudinea se modific lent o dat cu modificarea
frecvenei, n acest caz utilizndu-se metoda medierii sau metoda bazat pe teoria
primei aproximri, date n literatur.
2.11.3. Metoda balanei energetice
Aceast metod este utilizat pentru calculul aproximativ al perioadei
vibraiilor neliniare. Se consider ecuaia diferenial neliniar a vibraiilor libere
neamortizate sub forma:
0 ) x ( f x = + & &
Se studiaz aceast ecuaie n paralel cu ecuaia diferenial liniar a vibraiilor
libere neamortizate:
83
0 x x
2
o
= + & &
Pentru determinarea perioadei se pune condiia ca lucru mecanic efectuat n
acelai timp de ctre fora elastic neliniar i de ctre fora elastic liniar s fie
egale. Se alege ca interval de integrare cel corespunztor deplasrii din poziia de
echilibru pn la atingerea amplitudinii a. Rezult:
= =
a
o
a
o
a
o
2
2
o
dx ) x ( f
a
2
xdx dx ) x ( f
Rezult:
=
a
o
2
dx ) x ( f
a
2
2 2
T
Dac v-om considera ecuaia diferenial pentru sistemul neliniar cu
caracteristic elastic cubic, n vibraie liber atunci:
+ = + = = + +
a
o
a
o
4 2
2
o
3 2
o
3 2
o
4
a
2
a
dx ) x x ( dx ) x ( f 0 x x x& &
Rezult:
2
a
2
T
2
2
o
+
=
2.12. Vibraii forate cu amortizare neliniar
Ecuaia diferenial a vibraiilor forate cu amortizare neliniar se scrie sub
forma:
t sin F kx ) x ( f x m
o
= + + & & & unde ) x ( f & este o funcie neliniar.
Dac funcia ) x ( f & este slab neliniar, vibraia neliniar se ndeprteaz
suficient de puin de cea liniar. Pentru a studia ecuaia, se poate nlocui aproximativ
fora rezistent neliniar ) x ( f & cu fora rezistent liniar x c& i n felul acesta se poate
determina un coeficient de amortizare echivalent c
echiv
, din condiia ca cele dou fore
rezistente s efectueze ntr-o perioad acelai lucru mecanic, deci se liniarizeaz
ecuaia diferenial neliniar.
Soluia ecuaiei difereniale liniarizate, pentru regimul staionar este:
) t sin( x ) t ( x
o
= n care:
2
o
2
2
o
o
o
2 1
1
k
F
x
|
|
.
|
\
|
+
(
(
|
|
.
|
\
|
=
Lucru mecanic efectuat de fora rezistent neliniar ntr-o perioad, este:
= = =
T
o
2
o
.
o
T
o
) t ( d ) t cos( ) x ( f X dt
dt
dx
) x ( f dx ) x ( f L & & &
84
Lucrul mecanic efectuat de fora rezistent neliniar, ntr-o perioad este:
= = =
2
o
2
2
o o
2
o
o
2
2
cX dt ) t cos( X ) t cos( X c dx x c L &
=
2
o
cX = =
2
o
cX L >
Egalnd cele dou lucruri mecanice obinem:
=
2
o
o
echiv
) t ( d ) t cos( ) x ( f
X
1
C &
2.13. Vibraii autoexcitate
n cazul vibraiilor forate analizate, vibraia este ntreinut de o for
perturbatoare care exist independent de micare, fora fiind exterioar sistemului.
n acest caz fora perturbatoare acioneaz chiar i atunci cnd micarea este
oprit. Exist sisteme mecanice care vibreaz datorit unor cauze interne, forele
perturbatoare fiind determinate de micarea vibratorie. Amplitudinea vibraiei crete
n acest caz, n timp, pn cnd este limitat de un efect neliniar, vibraia numindu-se
autoexcitat sau autontreinut.
Ca exemplu de vibraii autontreinute se pot da: vibraia sculelor achietoare n
timpul prelucrrii prin achiere, datorit forelor de frecare; vibraiile liniilor
electrice, a courilor de fum, a podurilor suspendate sub aciunea vntului, datorit
apariiei vrtejurilor alternante Benard-Karman, care produc o for alternant,
vibraiile corzii de vioar, sub aciunea arcuului, vibraiile cretei cnd este inut
perpendicular pe tabl, vibraiile arborilor, datorit forelor de frecare din punctul de
contact dintre fus i cuzinet, n cazul unei lubrifieri insuficiente, pompajul
ventilatoarelor, vibraiile axiale ale turbinelor etc.
Caracteristicile vibraiilor autoexcitate sunt:
la vibraiile autoexcitate, fora periodic care ntreine micarea este creat sau
determinat de micarea nsi, atunci cnd micarea nceteaz, fora
perturbatoare dispare;
producerea vibraiilor autoexcitate este legat n mod direct de stabilitatea
poziiei de echilibru a sistemului.
Cea mai important problem, practic, privind analiza sistemelor autoexcitate
este determinarea condiiilor n care acestea sunt stabile, condiii numite i criterii de
stabilitate. Din cauza efectelor neliniare, calculul frecvenelor i a amplitudinilor
staionare finale este n general mult mai dificil.
Stabilitatea micrii sistemelor neliniare
S considerm cazul vibraiei libere amortizate a sistemului liniar cu un grad
de libertate definit de ecuaia diferenial:
0 kx x c x m = + + & & & : m
85
0 x
m
k
x
m
c
x = + + & & &
0 x x 2 x
2
0
= + + & & &
care are ecuaia caracteristic:
0 r 2 r
2
o
2
= + +
Dac c < km 2 c
cr
= rdcinile ecuaiei caracteristice sunt complex conjugate:
= = i r
2
o
2
2 , 1
cu:
2
2
o
=
Soluia ecuaiei difereniale este de forma:
) t sin B t cos A ( e x
t
+ =
Dac c > 0, atunci ultima relaie reprezint o oscilaie cu amplitudine
descresctoare (fig. 2.9).
Dac c < 0, primul factor are exponent pozitiv i sistemul iniial n repaus, va
oscila cu o amplitudine care v-a crete continuu, datorit sursei de energie interne
(fig. 2.49).
Fig. 2.49
La un sistem elastic pot s apar i efecte neliniare care limiteaz amplitudinea.
Ecuaia diferenial care definete micarea unui sistem neliniar cu amortizare
negativ la amplitudini mici, respectiv cu amortizare pozitiv puternic la amplitudini
mari are forma:
0 kx x ) ax c ( x m
2
= + + + & & &
Condiia fundamental de stabilitate a unui sistem liniar este ca rdcinile
ecuaiei caracteristice s aib prile reale negative, producnd astfel amplitudini
descresctoare.
Existena rdcinilor cu parte real negativ, care indic o funcionare stabil,
poate fi determinat prin mai multe metode prezentate n literatur: criteriul de
stabilitate Routh-Hurtwitz, criteriul de stabilitate Nyquist etc.
Criteriul de stabilitate Routh-Hurtwitz
Studiul stabilitii micrii revine deci la studiul semnului rdcinilor ecuaiei
caracteristice. Problema semnului rdcinilor se soluioneaz uor n cazul unor
ecuaii de gradul I sau II, dar ridic greuti n cazul ecuaiilor algebrice de grad
superior. S considerm c ecuaia caracteristic este de grad n:
86
0 a r a .... r a r a
n 1 n
1 n
1
n
o
= + + + +
Se admite c 0 a
o
> . Se poate demonstra c o condiie necesar, dar nu i
suficient, ca ecuaia s aib rdcini reale negative, sau rdcini complex conjugate
cu prile reale negative, este ca toi coeficienii
n 1 o
a ,....., a , a ai ecuaiei
caracteristice s fie pozitivi.
Criteriul de stabilitate Routh-Hurwitz arat c o condiie necesar i suficient
ca ecuaia caracteristic s aib rdcini cu pri reale negative este ca determinanii
formai cu coeficienii
n 1 o
a ,....., a , a ai ecuaiei caracteristice s fie pozitivi, adic:
0 a
1 1
> = ;
2 o
3 1
2
a a
a a
= > 0 ;
0
a a 0
a a a
a a a
3 1
4 2 0
5 3 1
3
> = ; .;
n
2 n 2 3 1
2 n 2 4 2 0
1 n 2 5 3 1
n
a 0 0 0
a .... a a 0
a .... a a a
a .... a a a
= > 0
2.14. Vibraii aleatoare
Vibraiile mecanice ale sistemelor mecanice pot avea un caracter aleator, atunci
cnd excitaia sistemului este aleatoare. Sunt aleatoare, de exemplu, vibraiile
provocate n autovehicole de ctre denivelrile ntmpltoare ale drumului, vibraiile
aeronavelor, vibraiile generate n rulmeni de microasperitile cilor de rulare i
impuriti etc. n aceste cazuri, att excitaia ct i rspunsul (micarea vibratorie)
sunt procese aleatoare. n cazul vibraiilor aleatoare micarea este ciclic fr a se
repeta n timp. Pentru caracterizare vibraiilor aleatoare sunt utilizate o serie de
mrimi probabilistice.
Fig. 2.50
87
S considerm n realizri finite ale unei vibraii aleatoare x
1
(t),.x
n
(t). Se
poate defini amplitudinea vibraiei aleatoare, la un moment dat t
1
, ca o variabil
aleatoare x(t), caracterizat de ansamblul statistic al valorilor ei, la momentul t
1
, n
toate realizrile posibile ale procesului aleator (fig. 2.50):
x(t
1
) = { x
1
(t
1
) ; x
2
(t
2
) ; .. ; x
n
(t
n
) } pentru: n
Valoarea medie a variabilei aleatoare x(t
1
) este definit de relaia:
=
=
n
1 k
1 k
n
1
) t ( x
n
1
lim ) t ( m
Funcia de autocorelaie definete msura n care procesul aleator rmne
asemntor cu el nsui n timp, i este definit de relaia:
) t ( x . ) t ( x
n
1
) , t (
1 k
n
1 k
1 k 1
+ =
=
Procesul aleatoriu este staionar dac valoarea medie i funcia de autocorelaie
nu depind de momentul t
1
ales:
m(t
1
) = = m(t
n
) = m
(t
1
,) = = (t
n
,) = = ()
Pentru o realizare x
k
(t) a unui proces aleatoriu staionar de durat T se definete
valoarea medie i funcia de autocorelaie a realizrii cu relaiile:
m
x(k)
= dt ) t ( x
T
1
lim
2
T
2
T
k
T
(k,)
= dt ) t ( x ) t ( x
T
1
lim
k
2
T
2
T
k
T
+
Procesul aleatoriu staionar se numete ergodic dac valoarea medie i funcia
de autocorelaie, definite pentru o realizare k, nu depind de realizarea aleas:
m(1) = m(2) = = m
x
= ) t ( x
(1,)= (2,)= = (k,)= ()
Un proces aleator ergodic poate fi caracterizat printr-o singur realizare.
Funcia de autocorelaie a unui proces aleatoriu staionar i ergodic este:
x
()= dt ) t ( x ) t ( x
T
1
lim
2
T
2
T
T
+
i arat n ce msur realizarea x(t) seamn cu ea nsi, dup un interval de timp .
Procesele aleatoare pot fi reprezentate n domeniul frecvenelor cu ajutorul
transformatei Fourier a funciei de autocorelaie:
88
(
x
())= S(f) d e ) (
if 2 -
x
=
+
Funcia S(f) se numete densitate spectral de putere i arat cum este
repartizat media ptratic pe unitatea de pulsaie.
Dou procese aleatoare staionare ergodice, definite prin realizrile x
1
(t) i
x
2
(t), pot fi static independente sau pot fi corelate ntre ele. Pentru a determina
corelarea dintre cele dou procese aleatoare se utilizeaz funcia de intercorelaie:
dt ) t ( x ) t ( x
T
1
lim ) (
2
2 / T
2 / T
1
T
12
+ =
i densitatea interspectral de putere:
d e ) ( R )) ( ( ) f ( S
if 2
12 12 12
+
= =
Pentru un proces aleatoriu staionar i ergodic, funcia de autocorelaie i
densitatea spectral de putere caracterizeaz evoluia n timp i structura procesului n
domeniul frecvenelor.
2.15. ocuri i micri tranzitorii
ocul simplu poate fi definit ca un proces n care sistemul mecanic primete o
cantitate de energie cinetic ntr-un timp scurt, comparativ cu perioada proprie de
vibraie a acestuia. n cazul micrilor tranzitorii (cunoscute i ca ocuri complexe),
procesul de transfer al energiei poate avea o durat echivalent cu cteva perioade
proprii de oscilaie. n general, att micrile sub form de oc, ct i cele tranzitorii,
au energia distribuit continuu, pe toat gama de frecvene, de la 0 la infinit.
i la astfel de micri, o descriere extrem de util a fenomenului se realizeaz
prin folosirea transformatei Fourier. ocul poate fi reprezentat ca o excitaie realizat
printr-o for f(t) cu durat de aciune T foarte scurt, definit astfel:
f(t) 0 pentru t[0,T]
f(t) = 0 pentru t(-,0) (T,)
funcia f(t), neperiodic d forma de und a ocului.
Coninutul n frecvene al ocului este caracterizat de spectrul densitii de
amplitudine al functiei f(t), numit spectrul de pulsaii al ocului. Acesta se obine
prin prezentarea grafic a modulului transformatei Fourier, care are expresia:
F[f(t)]=
=
T
o
t i t i
dt e ) t ( f dt e ) t ( f =F()
Ordonatele F() se numesc componente spectrale.
Componenta spectral n origine (=0) este:
F()
=0
=
T
0
dt ) t ( f
89
i este egal cu cantitatea de micare transmis sistemului n timpul ocului.
ocurile pot fi: impuls treapt (fig. 2.51.a), triunghiular(fig. 2.51.b), sinusoidal
(fig. 2.51.c). n cazul impulsului treapt, forma de und este dreptunghiular i este
A pentru t[0,T]
dat de funcia f(t) =
0 pentru t[-,o) (T,)
Transformata Fourier a funciei f(t) este:
F()= ) 1 e (
A
i dt e A dt Ae
T i
T
0
t i t i
= =
= )] 1 t (cos i T [sin
A
+
Spectrul de pulsaii este dat de modulul acestei funcii:
F()=
2
t
2
t
sin
AT
2
T
sin 2
A
) 1 t (cos t sin
A
2 2
= +
Fig. 2.51
2
t
2
t
sin
AT
) F
Dei energia ocului este distribuit pe toate componentele spectrale, se poate
considera c, practic, ea este distribuit pe componentele de pulsaie joas (<
T
2
),
90
ntruct
2
) ( F este neglijabil pentru
T
2
> . Frecvenele cuprinse ntre 0 i
T
1
2
=
, formeaz banda de frecvene a ocului (f =
T
1
).
Ptratul amplitudinilor transformatei Fourier, pentru fiecare frecven,
reprezint o mrime proportional cu energia.
Integrala spectrului ptratelor amplitudinilor pe tot domeniul de frecvene, va
reprezenta energia total a ocului.
2.16. Identificarea caracteristicilor dinamice ale sistemelor mecanice
Teoria i practica identificrii sistemelor mecanice n vibraie constituie o
problematic complex, de mari proporii. De aceea, n curs vom prezentat numai
unele aspecte cu caracter informativ, care s sublinieze finalitatea identificrii, ct i
unele elemente de natur metodologic.
Identificarea sistemelor mecanice implic un proces interactiv de corelare a
analizei teoretice cu determinrile experimentale. Caracteristicile dinamice ale
materialelor i structurilor pot fi exprimate printr-un model matematic adecvat al
sistemului analizat care permite un studiu cantitativ al fenomenelor, foarte util n
probleme de optimizare.
Identificarea dinamic a sistemelor mecanice include procesul de stabilire a
ecuaiilor difereniale de micare, n conformitate cu un criteriu de optimizare
prestabilit i a coeficienilor care intr n compunerea lor, pe baza unor relaii ntre
mrimile care caracterizeaz excitaia i respectiv rspunsul, determinate
experimental.
Procesul de identificare cuprinde trei etape principale:
stabilirea modelului teoretic;
stabilirea criteriului de comparaie a modelului teoretic cu sistemul real;
identificarea parametrilor modelului teoretic i evaluarea erorilor.
Pentru stabilirea modelului teoretic optim i calculul coeficienilor care intervin
n ecuaiile difereniale poate fi utilizat ca funcie criteriu integrala ptratului erorii
(eroarea fiind calculat ca diferen ntre rspunsul instantaneu al sistemului real i
cel al modelului teoretic considerat).
Amplitudinea erorilor va indica modelul teoretic optim pentru sistemul studiat.
Dac se consider modelul Kelvin, a crui ecuaie de micare este:
) t ( F kx x c x m = + + & & &
rezult eroarea:
( ) ( ) t F kx x c x m e + + = & & &
Prin ridicare la ptrat i integrare pe intervalul (0,T) obinem:
( ) ( ) [ ] dt t F kx x c x m dt e E
2
T
o
T
0
2
+ + = = & & &
91
Coeficienii necunoscui ai modelului Kelvin ) k , c , m ( se determin din
condiia ca eroarea s aib valoarea minim, rezult c derivatele pariale ale lui E n
raport cu coeficienii necunoscui, m, c, k, considerai variabili, trebuie s fie nule.
= + + =
T
0
T
0
T
0
T
0
2
0 dt ) t ( F x xdt x k dt x x c dt x m
m
E
& & & & & & & & &
= + + =
T
0
T
0
T
0
T
0
2
0 dt ) t ( F x xdt x k dt x c dt x x m
c
E
& & & & & &
Dac se adopt pentru excitaia modelului o funcie armonic:
) t sin( F ) t ( f + =
cu F amplitudinea excitaiei, - pulsaia i - unghiul de faz, atunci, rezult o
variaie armonic a parametrilor micrii:
t sin A x = & &
t cos
A
x
= &
t sin
A
x
2
=
Dup ce se nlocuiesc aceste expresii i efectum integrarea, obinem relaiile:
=
cos F
kA
mA
2
=
sin F
cA
Aceste relaii trebuie s fie verificate pentru orice pulsaie
i
. Dac se
consider aceste relaii pentru n pulsaii discrete, pentru care s-au msurat
acceleraiile maxime
i
A , fora maxim
i
F i defazajul
i
, se pot scrie n ecuaii
algebrice. Pentru cele n
2
ecuaii algebrice se calculeaz suma ptratelor abaterilor cu
relaia:
2
n
1 i
2
1
i
i i i 1
A
k mA cos F S
=
(
+ =
Pentru ca suma s fie minim, trebuie ca derivatele pariale n raport cu m i
k s fie nule:
0 cos F
kA
A mA 0
m
S
n
1 i
i i
2
i
i
i
2
i
1
=
(
|
|
.
|
\
|
=
( ) 0 / cos F mA A
kA
0
k
S
n
1 i
2
i i i i i
2
1
2
i 1
=
(
+ +
=
92
Rezolvnd sistemul n raport cu m i kse obine masa i rigiditatea
sistemului. n acelai mod obinem:
2
n
1 i
i
i
i i 2
cA
sin F S
=
(
=
iar din condiia de minim a sumei
2
S rezult:
c 0 sin F
A cA
0
c
S
n
1 i
i i
i
i
2
i
2
i 2
=
(
=
Introducnd valorile coeficienilor c , k , m n modelul teoretic, putem calcula
valorile
i
A
~
i
i
~
pentru diverse pulsaii
i
. Valorile calculate
i
A
~
i
i
~
se compar
cu valorile msurate
i
A i
i
cu ajutorul erorii, definit ca diferen ntre valorile
msurate i cele calculate:
i i A
~
A E =
i i
~
E =
Amplitudinea minim a erorilor va indica modelul teoretic optim pentru
sistemul studiat.
a) b)
Fig. 2.52
n fig. 2.52.a sunt prezentate erorile de amplitudine pentru trei modele
teoretice, iar n fig. 2.52.b sunt erorile de faz pentru aceleai modele, n cazul unui
izolator de vibraii din cauciuc. Rezult c eroarea de amplitudine minim este
asigurat de modelul neliniar.
93
3
METODE SI TEHNICI DE MSURARE I ANALIZ
A SEMNALULUI VIBROACUSTIC
3.1. Scheme generale pentru msurarea i analiza semnalului vibroacustic
n condiiile tehnicii actuale, msurarea i analiza vibraiilor i zgomotului, n
scopul controlului vibroacustic al sistemelor mecanice, necesit utilizarea unor lanuri
de procesare a semnalului care cuprind urmtoarele componente de baz (fig. 3.1):
traductor de semnal;
dispozitiv pentru condiionarea semnalului;
dispozitiv de analiz;
nregistrator.
Fig. 3.1
Traductorul de semnal are rolul de a converti energia mecanic a vibraiilor
sau a undelor acustice, n energie electric, oferind la ieire un semnal electric care s
poat fi procesat n continuare de lanul de msurare. Pentru msurarea vibraiilor
mecanice pot fi utilizai traductori parametrici (rezistivi, capacitivi, electromagnetici)
sau generatori (electrodinamici, piezoelectrici).
Realizrile tehnologice din domeniul materialelor piezoelectrice, n paralel cu
perfecionarea tehnicii electronice de procesare a semnalului, au fcut ca traductorul
piezoelectric s fie preferat pentru msurarea vibraiilor, avnd n acelai timp i o
serie de caliti deosebite: domeniu de frecven i dinamic extins, gabarit i mas
redus, construcie simpl i robust etc.
n figura 3.2 este prezentat caracteristica tipic a unui accelerometru
piezoelectric, a crui domeniu de frecven se limiteaz superior la cca. 30% din
frecvena de rezonan proprie traductorului.
94
Fig. 3.2
Frecvena limit superioar a traductorului de acceleraii depinde i de modul
de fixare a traductorului care poate fi: cu suport magnetic, cu tift filetat, lipire cu
adezivi. Cea mai bun metod de fixare a accelerometrului piezoelectric este cu tift
filetat, pe suprafa plan i neted.
Alegerea corect a tipului de traductor de vibraii se face n funcie de:
parametrul msurat (deplasare, vitez, acceleraie);
impedana mecanic a sistemului mecanic;
sensibilitatea i precizia traductorului;
domeniul de frecven;
condiiile de mediu.
Pentru conversia energiei acustice n energie electric este utilizat microfonul,
care poate fi: dinamic, piezoelectric sau tip condensator.
Microfonul trebuie s asigure fidelitate ntr-un domeniu dinamic i frecven
ct mai larg. n prezent microfonul tip condensator este cel mai des utilizat n
msurtorile de zgomot.
Sensibilitatea microfonului condensator scade odat cu micorarea diametrului,
ntruct crete rigiditatea diafragmei, iar variaia de capacitate este direct
proporional cu suprafaa diafragmei.
Microfoanele cu diametre mici sunt recomandate pentru msurarea zgomotului
n care predomin componentele de nalt frecven i atunci cnd se dorete
obinerea unui rspuns omnidirecional.
Pentru micorarea capacitii de cuplare a microfonului cu preamplificatorul i
pentru eliminarea semnalelor parazite, microfonul se monteaz direct pe corpul
preamplificatorului.
Alegerea microfonului pentru controlul acustic al sistemelor mecanice se face
considernd urmtoarele caracteristici:
domeniul de frecven cu rspuns liniar;
domeniul dinamic;
directivitate;
sensibilitate la vibraii, temperatur, la variaii de presiune atmosferic etc.
95
Dispozitivele de condiionare a semnalului vibroacustic sunt folosite n
lanurile de control vibroacustic n urmtoarele scopuri:
preamplificare;
adaptarea impedanelor;
derivarea sau integrarea semnalului;
filtrarea semnalului;
mediere n timp;
transformare de frecven;
conversie de semnal analog-digital;
limitare de suprasarcin etc.
Preamplificatoarele pentru traductorii de vibraii trebuie s realizeze n
special transformarea impedanei mari de ieire a accelerometrelor piezoelectrice, la o
valoare mic corespunztoare impedanei de intrare n amplificatoarele de msur,
precum i amplificarea reglabil a semnalului slab, generat de traductor, la o valoare
acceptabil. De asemenea ele trebuie s realizeze i integrarea sau derivarea
semnalului, pentru a putea msura cei 3 parametri caracteristici ai vibraiilor
(acceleraie, vitez sau deplasare). Preamplificatoarele pentru microfoane au funcii
similare ca preamplificatoarele pentru vibraii, cu excepia integrrii.
Analizorul poate s lucreze n domeniul frecven, domeniul amplitudine sau n
domeniul timp. Dezvoltarea tehnicii de analiz n timp real i n special a tehnicii de
prelucrare a datelor prin transformarea rapid Fourier, ofer posibiliti de cretere a
vitezei i preciziei de analiz.
Pentru stocarea semnalului, n vederea prelucrrii ulterioare sau a realizrii
analizei n frecven, se poate realiza nregistrarea acestuia pe band magnetic sau n
memorie magnetic, cu nregistrare digital. nregistrarea rezultatelor analizei se
poate face pe hrtie obinuit sau sensibil (foto), pe band magnetic, nregistrarea
n memorie magnetic, tiprirea pe imprimant, afiarea pe ecran.
Introducerea n schema de msurare a unui calculator, cu echipamente periferice
corespunztoare, permite prelucrarea automat a semnalului, realiznd o precizie
ridicat, posibiliti multiple de comparaie a rezultatelor etc.
Schema de excitaie, pentru ncercrile la vibraii, conine: traductoare de for,
vibrator, amplificator de putere, generator de semnal (fig. 3.1).
Traductorul de for poate fi: piezoelectric sau rezistiv.
Vibratorul poate fi: mecanic, hidraulic sau electrodinamic.
Vibratoarele mecanice i hidraulice sunt utilizate pentru realizarea unor excitaii
caracterizate prin fore i deplasri mari i permit excitaii ntr-un domeniu de
frecven limitat. Vibratoarele electrodinamice pot realiza un domeniu de frecven
larg, cu posibiliti superioare de control electronic al caracteristicilor excitaiei.
Amplificatorul de putere trebuie s asigure amplificarea semnalului fr
distorsiuni, n domenii de frecven i dinamice ct mai largi.
Excitatorul de control trebuie s permit realizarea de semnal sinusoidal, cu
frecven variabil i controlabil. Aparatele moderne sunt realizate n general n
construcii compacte, care includ: condiionarea semnalului, analiza, msurarea etc.
96
3.2. Metode de analiz a semnalului vibroacustic
3.2.1. Analiza n domeniul frecven
Analiza vibraiilor i zgomotului, n scopul controlului vibroacustic al
sistemelor mecanice, constituie o metod modern i eficient pentru determinarea
condiiilor de funcionare.
Analiza vibraiilor i zgomotului se poate face:
n domeniul frecven;
n domeniul timp;
n domeniul amplitudine;
cu metode speciale de analiz.
Analiza n domeniul frecven a vibraiilor i zgomotului generat de maini i
utilaje, reprezint o metod modern de control, pentru depistarea cauzelor
determinante, din urmtoarele motive:
modificri ale anumitor componente spectrale, n corelaie cu defecte evolutive
i care nu afecteaz sensibil nivelul de vibraii global, sunt detectabile n
spectrul de frecven;
o cretere a nivelului global de vibraii indic modificri funcionale, dar nu d
nici o indicaie asupra cauzei, cauzele fiind adesea relevate prin modificri
nsemnate ale unor componente din spectrul de frecven.
Analiza spectrului de frecven se poate face cu filtre (fig. 3.3):
cu band de lime constant;
cu band de lime procentual constant.
Fig. 3.3
Recomandrile de alegere a modalitilor de analiz sunt destul de complexe i
depind ntr-o mare msur nu numai de caracteristicile semnalului studiat, ci i de
performanele aparaturii.
Analiza de frecven cu banda de filtrare constant (31000 Hz) este de
preferat n cazul semnalelor staionare periodice, cu un numr mare de componente
armonice stabile n spectru sau n cazul studiului transmisiei vibraiilor, al producerii
deteriorrilor prin oboseal sau uzur, cu toate c la frecvene mari volumul
97
Fig. 3.4
rezultatelor obinute ngreuneaz interpretrile; o recomandare general indic banda
de filtrare ngust, cu lime constant, concomitent cu o scar liniar de frecvene,
pentru studiul vibraiilor, al cauzelor, al fenomenelor de rezonan n vibraii.
Analiza cu band de lime procentualconstant fa de frecven este
indicat, n acelai timp cu scara de frecven logaritmic (fig. 3.4), pentru
fenomenele la care primele armonici sunt importante i cu relativ instabilitate n
frecven datorit unor uoare fluctuaii de frecven ale excitaiei, turaiei etc.
n cazul analizei de frecven, cu filtre cu band cu lime constant, n fiecare
secund se pot studia B
2
/8B
2
/4 poziii de filtrare succesive (B este limea benzii n
Hz). Reducerea timpului de analiz se poate realiza rotind cu vitez amplificat
semnalul nregistrat. n felul acesta limea filtrului crete proporional, ceea ce
permite o vitez mai mare de baleiere a domeniului de frecven i deci un timp de
analiz mai redus, asigurnd n acelai timp aceeai rezoluie.
Posibiliti net superioare de reducere a timpului de analiz l ofer analiza
spectral n timp real, care se prefer ndeosebi la semnalele nestaionare n
amplitudine sau frecven.
Analizoarele n timp real, cu compresie de timp i filtrare digital, dup o
conversie analog digital, nregistreaz semnalul ntr-o memorie de tip digital.
Memoriile sunt recirculate cu vitez mrit, cu o amplificare deci a
frecvenelor, n scopul analizei digitale (1, 1/3, 1/12 octav).
Amplificarea frecvenelor, implicit posibilitatea de mrire a limii benzii de
filtrare n acest mod, are ca efect o important reducere a timpului necesar analizei.
Acelai efect l are i filtrarea prin prelucrarea digital a datelor din memorie
sau dintr-o nregistrare continu. n acest caz este de remarcat de asemenea c
prelucrarea semnalului se poate realiza n mod continuu, prin nregistrarea continu
de semnale noi, odat cu ndeprtarea celor vechi.
Filtrarea digital este indicat pentru filtrarea cu band de lime procentual
constant i scar logaritmic n frecven.
Tehnica de prelucrare a datelor, prin transformarea rapid Fourier (FFT Fast
Fourier Transform), a condus la dispozitive n care analiza unui fragment de semnal
se realizeaz digital, concomitent, pentru toate componentele, desigur cu eficien
98
sporit n timp i n precizia datelor obinute, cu recomandare pentru banda de filtrare
constant i scar liniar (fig. 3.3).
Este de remarcat de asemenea c la analizoarele de tip digital menionate exist
posibiliti de prelucrare la intervale i durate date de timp a unui numr prestabilit, n
funcie de precizia dorit, de fragmente de semnal care sunt mediate i ulterior
analizate sau prelucrate pentru determinarea spectrului, a funciilor de corelaie etc.
Prelucrarea datelor n acest mod permite i efectuarea analizelor mai dificile n
domeniul de amplitudine sau de timp, analize statistice etc.
n efectuarea analizei ntr-o modalitate sau alta intervin o multitudine de
parametrii specifici care depind fie de caracteristicile generale ale semnalului, fie de
aparatura de analiz sau nregistrare utilizat.
3.2.2. Analiza n domeniul timp
Analiza n domeniul frecven, dei foarte eficient, nu reprezint un
instrument universal capabil s furnizeze un rspuns despre starea mainilor i
utilajelor n orice condiii. n cazul unor excitaii prin oc, sau avnd caracter
impulsiv, rspunsul sistemului va fi format din componente corespunztoare
frecvenelor proprii ale structurii. n astfel de situaii defectele vor modifica mai puin
spectrul de frecvene al vibraiilor sau zgomotului, dar mult mai probabil vor
determina modificri sesizabile ct privete evoluia semnalului n domeniul timp.
Cea mai simpl modalitate de analiz n domeniul timp este medierea n timp i
exprimarea corespunztoare a rezultatelor fie ca mrimi globale fie n spectre de
frecven. nregistrarea evoluiei n timp a semnalului, implicit reinerea valorii
maxime, constituie o alt metod de analiz, iar compresia de timp ofer posibiliti
net sporite, n special la nregistrarea n memorie de tip digital.
Dispozitivele recente efectueaz, n timp real, concomitent analiza n domeniul
timp i frecven.
n vederea reducerii sau chiar eliminrii componentelor nedorite, se poate
realiza o operaie de mediere n domeniul timp, naintea efecturii analizei n
domeniul frecven.
Analiza semnalului n domeniul timp se constituie ca o modalitate principal
de studiu pentru semnale nestaionare tranzitorii i chiar staionare aleatorii n ce
privete punerea n eviden a unor frecvene dominante.
3.2.3. Analiza n domeniul amplitudine
n marea majoritate a cazurilor exist un mod tipic de evoluie n timp a
deteriorrilor cauzate prin fenomene de uzare. Iniial se manifest defecte locale,
singulare, care genereaz excitaii cu caracter impulsiv, de oc, a cror frecven
crete n timp i care determin apariia unor vrfuri ascuite n rspunsul structurii.
Distribuia amplitudinilor globale sau filtrate ntr-un interval de timp
determinat, constituie o soluie simpl de analiz a semnalului n domeniul
99
amplitudine. Dispozitive adecvate permit prelucrarea rezultatelor n vederea trasrii
de histograme sau curbe de distribuie.
Prelucrarea digital complex a semnalului, n scheme perfecionate, ofer
direct distribuii de probabilitate simple sau cumulate procentual, care simplific
considerabil interpretarea.
3.2.4. Analiza prin funcia de autocorelaie
Introducerea unor tehnologii superioare pentru prelucrarea datelor pe baza
algoritmului FFT a permis perfecionarea metodelor de analiz existente, precum i
introducerea unor metode noi, dintre care cele mai utilizate sunt: analiza prin funcia
de autocorelaie i analiza CEPSTRUM.
Analiza prin funcia de autocorelaie n domeniul timp indic msura n care
un semnal x(t) se coreleaz cu acelai semnal deplasat n timp, fiind definit prin
relaia:
+ =
T
0
dt ) t ( x ) t ( x
T
1
lim ) (
Reprezentarea grafic a funciei de autocorelaie, n funcie de deplasarea ,
formeaz corelograma procesului vibratoriu, a crei form furnizeaz unele indicaii
asupra coninutului n frecvene. Corelograma admite pentru = 0 un maxim, cu att
mai pronunat, cu ct coninutul n frecvene nalte este mai bogat.
Fig. 3.5
a) La limit, pentru un proces aleatoriu staionar ideal (zgomot alb), corelograma
are aspectul din (fig. 3.5.a);
b) proces aleatoriu de band larg (fig. 3.5.b);
c) proces aleatoriu de band ngust (fig. 3.5.c).
Din punct de vedere practic, aparatura care permite obinerea funciei de
autocorelaie folosete tehnica FFT pentru transferul datelor din domeniul timp n
domeniul frecven i apoi din nou n domeniul timp.
Rezultatele prezint interes pentru studiul periodicitii n semnale, separarea
ecourilor etc.
100
3.2.5. Analiza Cepstrum
Cuvntul CEPSTRUM a fost obinut prin anagramarea cuvntului
SPECTRUM, ntruct iniial analiza CEPSTRUM a fost definit ca o analiz a
spectrului de putere, al logaritmului spectrului de putere al semnalului din domeniul
timp. Dac se noteaz cu X (f) transformata direct Fourier a unei funcii de timp x(t),
spectrul de putere S
x
(f) este dat de relaia:
2
ift 2
2 2
x
dt e ) t ( x )] t ( x [ ) f ( X ) f ( S
+
= = =
Iar CEPSTRUMUL C
x
() este reprezentat prin relaia:
2
ift 2
x
2
x x
dt e ) f ( S ln )]} f ( S {ln[ ) ( C
= =
Ulterior, pentru analiza CEPSTRUM s-a impus o nou definiie bazat pe
utilizarea transformatei Fourier inverse asupra logaritmului spectrului de putere:
df e ) f ( S ln )] f ( S [ln ) ( C
ift 2
x x
1
x
= =
Variabila independent a CEPSTRUMULUI are dimensiuni fizice de timp i
are denumirea de cvefren.
Efectuarea analizei CEPSTRUM presupune procesarea semnalului x(t) dup
etapele indicate n figura 3.6, folosind analizoare dinamice de spectru, bazate pe
tehnica FFT, cuplate cu un calculator numeric.
Fig. 3.6
Fig. 3.6
Spre deosebire de spectrul de frecvene, CEPSTRUMUL este mai puin
sensibil la caracteristicile dinamice ale structurii care influeneaz relaia rspuns
excitaie. La aceeai excitaie, spectrul de frecvene depinde mult de punctul n care
se monteaz traductorul pe structur, n timp ce CEPSTRUMUL este mai puin
sensibil la modificarea punctului de msur.
Forma spectrului de frecvene poate fi de asemenea modificat considerabil de
schimbrile de faz introduse n procesul de propagare a semnalului.
Un alt avantaj important al analizei CEPSTRUM rezid n faptul c toate
benzile laterale, ale unei frecvene din spectru, sunt grupate n CEPSTRUM, n
principal, ntr-o singur linie, numit ramonic, care conine informaii semnificative
privind nlimea medie a benzilor laterale.
Dup identificarea n CEPSTRUM a unei serii de ramonice, n general, este
suficient s se determine numai prima i s se neglijeze cele de ordin superior.
Capacitatea analizei CEPSTRUM de a detecta unele periodiciti ascunse din
spectru ofer anumite avantaje n problemele practice de diagnosticare a defectelor.
( ) [ ] t x
( ) [ ]
2
t x ( ) [ ]
2
t x ln
( ) [ ] } t x {ln
2
1
x(t) ( )
x
C ( ) [ ] t x x(t)
101
Fig. 3.7
102
n fig. 3.7.a. este prezentat spectrul de frecvene cu 400 linii obinut prin
analiza n domeniul 3,5kHz 13,5kHz a semnalului obinut de la o cutie de viteze, n
care se evideniaz uor prezena primelor trei armonice ale frecvenei de angrenare,
f=4,3kHz, dar fr a putea fi evideniate cu claritate benzile laterale.
CEPSTRUMUL realizat pe baza acestui semnal i prezentat n fig. 3.7.b. indic
ca importante numai componentele de 85 Hz i 50 Hz corespunztoare vitezelor de
rotaie a arborelui, toate componentele semnificative din CEPSTRUM fiind ramonici
ale uneia dintre aceste dou frecvene.
Se constat experimental c un numr mare de factori (raportul semnal/
zgomot, limea de band a filtrelor, factorul de form al filtrelor, distana dintre
benzile laterale etc.) influeneaz valorile CEPSTRUM i de aceea trebuie s se
compare numai analize CEPSTRUM obinute n condiii identice.
Avantajul analizei CEPSTRUM, n comparaie cu analiza n frecven
obinuit, rezid n sensibilitatea sporit a acesteia i simplificarea interpretrii
rezultatelor experimentale, ntruct n CEPSTRUM vrfurile periodice din spectrul de
frecvene sunt cumulate.
3.2.6. Funcia de rspuns n frecven
Funcia de rspuns n frecven H(f), numit i funcia de transfer, este definit
ca un raport ntre transformatele Fourier directe ale rspunsului x(t) i excitaiei f(t)
ale unui sistem mecanic:
H(f) =
[ ]
[ ] ) t ( f
) t ( x
Dintre aplicaiile funciei de rspuns n frecven se menioneaz:
determinarea caracteristicilor sistemului mecanic;
determinarea impedanei mecanice, cnd excitaia f(t) este o for, iar rspunsul
x(t) o vitez;
studii privind efectul diverselor excitaii asupra unui sistem mecanic.
3.2.7. Metoda analizei modale
O structur mecanic real, alctuit dintr-o conexiune de elemente continue,
poate fi dinamic simulat printr-un sistem cu un numr finit de grade de libertate.
Precizia simulrii depinde de valoare acceptat pentru numrul gradelor de
libertate. Micarea sistemelor cu numr finit de grade de libertate este descris de un
sistem de ecuaii difereniale de ordinul doi, care se poate scrie sub form matriceal:
[ ] { } [ ] { } [ ] { } { } f x k x c x m = + + & & &
Metodele experimentale ale analizei modale urmresc determinarea
caracteristicilor dinamice ale structurilor mecanice, respectiv aprecierea matricelor
masei [m], de amortizare [c] i de rigiditate [k]. Deoarece aceste matrici nu pot fi
msurate direct, n tehnica experimental a analizei modale, caracteristicile dinamice
sunt deduse utiliznd alte mrimi, cum ar fi: pulsaiile proprii ale structurii,
103
amortizrile din sistem i forma modurilor proprii de vibraie, care la rndul lor pot fi
apreciate folosind funcia de rspuns n frecvent.
Un experiment de analiz modal necesit parcurgerea urmtoarelor etape:
stabilirea tehnicii de excitare a structurii;
stabilirea modului de extragere a datelor i de prezentare a acestora;
analiza datelor experimentale i extragerea caracteristicilor dinamice necesare
construirii unui model modal util n aplicaiile ulterioare.
n funcie de valoarea frecvenei, excitaia poate fi :
la frecvene cu valori fixe;
cu excitaie sinusoidal;
cu excitaie cu band larg de frecven.
Dup numrul punctelor de excitaie, excitaia poate fi:
ntr-un singur punct (cu un singur excitator);
n mai multe puncte (cu mai multe excitatoare).
Studiul experimental al vibraiilor forate ale structurilor mecanice la o
excitaie sinusoidal urmrete:
identificarea proprietilor specifice ale structurii mecanice (coeficieni de
amortizare, constante elastice etc.)
identificarea pulsaiilor proprii i a modurilor proprii de vibraii;
stabilirea unui model matematic, al structurii mecanice, n scopul unei analiza
ulterioare prin simulare;
verificarea studiilor teoretice privind transmiterea vibraiilor n structurile
mecanice.
Realizarea unui model matematic optim al structurilor mecanice i
determinarea parametrilor dinamici ai acestora, permite aprecierea comportrii
dinamice a acestora nc din faza de proiectare i deci realizarea de modificri
structurale n scopul atenurii vibraiilor i zgomotului structural.
Rspunsul structurii mecanice, pentru diverse valori ale excitaiei, se
nregistreaz grafic, obinnd diagrama amplitudine-frecven din care rezult:
valorile frecvenelor proprii, care coincid aproximativ cu valorile frecvenelor
pentru care diagrama amplitudine-frecven prezint vrfuri;
valoarea amortizrii corespunztoare fiecrui mod propriu de vibraie.
Analiza modal cu excitaia ntr-un punct
n cazul tehnicilor de analiz cu excitaie ntr-un punct, structura mecanic este
excitat n punctul i cu o for sinusoidal f
i
= F
i
sin t, iar rspunsul este msurat n
punctul j (fig. 3.8). Datorit manifestrii fenomenelor de rezonan, pe frecvenele
proprii ale structurii mecanice, puterea necesar pentru meninerea forei de excitaie
la un nivel constant este funcie de frecven, fapt ce implic intercalarea unei bucle
de reacie pentru meninerea forei de excitaie constant. Rspunsul structurii este
prezentat sub diverse forme: deplasri, viteze sau acceleraii.
104
Cunoscnd experimental valoarea excitaiei i valoarea rspunsului, pentru
diverse valori ale frecvenei de excitaie, se calculeaz valoarea receptanei (raportul
deplasare/for)
ji
ca o mrime complex;
ji
=(
ji
)
R
+i(
ji
)
I
care se reprezint grafic, obinnd diagrama amplitudine-pulsaie sau diagrama
Nyquist.
Din analiza diagramelor se extrag n primul rnd valorile pulsaiilor proprii, iar
n al doilea rnd, parametrii modali cu care se pot calcula matricele [m], [k], [c].
Fig. 3.8
Reprezentnd dependena receptanei cu pulsaia se obine o variaie cu o serie
de maxime la pulsaii foarte apropiate de pulsaiile proprii ale sistemului.
Atunci cnd pulsaiile proprii ale sistemului cu mai multe grade de libertate
sunt relativ deprtate, fiecare maxim poate fi apreciat ca rspunsul la rezonan al
unui sistem cu un singur grad de libertate.
Rezult c n cadrul acestei metode, valorile pulsaiilor proprii sunt identificate
cu pulsaiile pentru care se realizeaz vrfuri n diagrama amplitudine -frecven.
n cazul acestei metode, este necesar repetarea msurrilor n suficient de
multe puncte, pentru a avea certitudinea c odat cu modificarea lent pentru fiecare
punct al frecvenei, toate modurile proprii s-au manifestat n curbele de rspuns.
Atunci cnd amortizrile din sistem cupleaz modurile proprii de vibraii, sau
modurile proprii se suprapun, valorile teoretice ale pulsaiilor proprii sunt uor
diferite de valorile extrase din diagrama rspunsului.
A doua informaie ce poate fi extras din curba de rspuns n frecven este
valoarea amortizrii corespunztoare fiecrui mod propriu de vibraie, amortizare
care determin de fapt mrimea vrfului de rezonan. Fraciunea de amortizare
critic
r
se poate aprecia prin metoda punctelor de semiputere:
105
Fig. 3.9
) ( .
1
k
r ji r
r
=
dup care se determin masa modal cu relaia:
2
r
r
r
k
m
=
Rspunsul unei structuri mecanice, considerate ca un sistem liniar, poate fi
determinat pe baza principiului suprapunerii efectelor, avnd rspunsurile structurii n
modurile proprii, considernd c n fiecare mod propriu sistemul rspunde ca un
sistem liniar cu un grad de libertate.
Totui, ca urmare a contribuiei introduse de modurile proprii nerezonante,
rspunsul sistemului cu mai multe grade de libertate este diferit de rspunsul la
rezonan al sistemului cu un grad de libertate. Modificarea formei curbei rspunsului
ca rezultat al manifestrii modurilor nerezonante determin erori n estimarea
amortizrilor. Pentru a excita un mod propriu de vibraie, excitaia trebuie s fie
realizat cu mai multe fore, avnd o anumit distribuie n cadrul sistemului cu mai
multe grade de libertate.
3.3. Tehnica de analiz n frecven a semnalului vibroacustic
Analiza n frecven urmrete descompunerea unui semnal complex n
componente armonice, obinnd spectrul de frecven al semnalului.
Spectrul de frecven al vibraiilor i zgomotelor este utilizat la controlul,
diagnosticarea i monitorizarea strii de funcionare a mainilor.
Analiza n domeniul frecvent se realizeaz, clasic, prin trecerea semnalului de
analizat printr-un sistem care conine urmtoarele blocuri funcionale (fig. 3.10):
preamplificator de intrare;
filtru de band;
detector;
nregistrator sau display.
Semnal
de intrare
Fig. 3.10
r
1 2
2
r
2
1
2
2
r
f
f f
f 2
f f
=
unde f
r
este frecvena proprie a modului propriu,
iar f
1
i f
2
sunt frecvenele la care amplitudinea
micrii este redus cu 2 n raport cu valoarea
maxim la rezonan (fig. 3.9).
Constanta elastic k
r
se determin pe baza
valorii receptanei la rezonan:
Amplificator
intrare
Filtru Detector nregistrator
Display
106
Aparatele care realizeaz analiza de frecven se numesc, uzual, analizoare.
Analiza n domeniul frecvenei se poate clasifica astfel:
analiza de frecven cu filtre;
-cu lime de band constant;
-cu lime de band procentual constant;
analiza de frecven succesiv:
- n trepte;
- continu;
analiza de frecven n timp real (REAL TIME);
- cu filtre de tip analog n paralel;
- cu filtre de tip digital;
analiza Fourier (FAST FOURIER TRANSFORM , FFT).
Pentru realizarea analizei de frecven trebuie ndeplinite urmtoarele condiii
generale:
domeniul de frecven analizat trebuie s acopere domeniul de frecven al
fenomenului studiat;
puterea de rezoluie a filtrrii trebuie s fie ct mai ridicat;
timpul necesar analizei trebuie s fie ct mai redus;
Alegerea modalitilor de analiz se realizeaz n funcie de caracteristicile
semnalului studiat i de performanele aparaturii.
3.3.1. Analizoare analogice
Filtru de band are rolul de a separa componentele spectrale. Caracteristicile
importante ale unui filtru de band sunt: frecvena central f
0
, limea de band B i
selectivitatea (fig. 3.11).
Limea de band furnizeaz indicaii privind capacitatea filtrului de a separa
componente spectrale de frecvene apropiate.
Fig. 3.11
107
Selectivitatea indic capacitatea filtrului de a separa componente de niveluri
diferite. Pentru aprecierea selectivitii filtrelor cu lime de band procentual
constant, care au o caracteristic simetric pe scara logaritmic a frecvenelor, se
utilizeaz adesea parametrul selectivitate la o octav, care ne d atenuarea
caracteristicii filtrului pe o octav. De la aplicarea la intrarea unui filtru a unui semnal
sinusoidal, avnd frecvena n interiorul benzii de trecere a filtrului, i pn la
realizarea semnalului la ieire, la aceeai valoare final a amplitudinii, este necesar un
timp T
R
, numit timp de rspuns (fig. 3.12).
Fig. 3.12
ntre limea de band a filtrului B i timpul de rspuns T
R
, se poate scrie
relaia: 1 T B
R
, utilizabil direct pentru filtre cu lime de band constant.
Pentru filtrele cu lime de band procentual constant, este folosit relaia:
1 n b
R
n care
0
f
B
b = este limea procentual de band, iar
R 0 R
T f n = este
numrul de perioade ale frecvenei centrale
0
f n timpul
R
T .
Rezult c timpul de msurare cu un filtru de band de lime B trebuie s fie
minimum 1/B.
Detectorul are rolul de a evalua puterea medie coninut n semnalul alternativ
furnizat la ieirea filtrului.
n acest scop, detectorul conine un prim etaj de ridicare la ptrat a semnalului,
pentru a obine o mrime proporional cu energia instantanee, urmat de un etaj de
mediere pentru a furniza valoarea medie ptratic pe o anumit perioada T
A
.
nregistratorul. n cazul nregistrrii n curent continuu, semnalul este primit
de la un detector analogic i se poate stabili ntotdeauna o vitez de scriere suficient
de mare care s permit nregistrarea la viteze permise de detector.
n cazul nregistrrii n curent alternativ semnalul este primit direct de la filtru,
procesul de ridicare la ptrat i de mediere realizndu-se n nregistrator.
Analizoarele analogice pot fi:
cu filtre discrete;
cu filtru acordabil;
108
paralele n timp real;
cu compresia timpului.
3.3.2.Analizorul cu filtre discrete
Semnalul de la traductorul de vibraii este condiionat de un preamplificator i
aplicat unui grup de N filtre, ale cror benzi de frecven sunt alese astfel nct s
acopere tot domeniul de frecven dorit.
Detectorul este conectat succesiv la ieirea fiecrui filtru, pentru msurarea
puterii semnalului pe fiecare band de frecven (fig. 3.13).
Fig. 3.13
Viteza de baleiere a filtrelor poate fi controlat i sincronizat cu viteza unui
nregistrator de nivel care nregistreaz spectrul. Din considerente economice
numrul filtrelor ntr-un astfel de analizor este limitat.
3.3.3. Analizorul cu filtru acordabil
Acest analizor are un singur filtru cu frecven central reglabil, care poate fi
baleiat, pe ntreg domeniul de frecvene utilizat (fig. 3.14).
Filtru acordabil poate fi realizat att cu lime de band constant, ct i cu
lime de band procentual constant.
ntruct timpul de rspuns al unui filtru este cu att mai mare cu ct limea de
band este mai mic, viteza de baleiere trebuie corelat cu limea de band.
Fig. 3.14
Analizoarele cu filtre discrete sau cele cu filtru acordabil, pot analiza numai
semnale staionare. n acest scop semnalul trebuie nregistrat pe o bucl de band
magnetic sau ntr-o memorie numeric.
3.3.4. Analizorul paralel n timp real
Acesta obine ntregul spectru de frecvene n paralel, de la acelai semnal de intrare.
Analizoarele paralele, n timp real, permit obinerea mult mai rapid a spectrului,
fiind ns mai scumpe i cu rezoluie limitat.
109
Fig. 3.15
3.3.5. Analizorul cu compresia timpului
Timpul necesar realizrii analizei n frecven este limitat inferior de timpul de
rspuns al filtrului, care este legat de limea de band. Mrirea vitezei de analiz se
poate realiza prin creterea limii de band B, ceea ce ar implica o micorare a
rezoluiei analizorului. Pentru a menine aceeai rezoluie se poate realiza o
nregistrare a semnalului la o vitez, dup care, n scopul analizei, se red semnalul
cu o vitez de M ori mai mare, ceea ce face ca toate frecvenele s fie mrite de M
ori. In felul acesta se obine aceeai rezoluie, cu un filtru cu limea de band de M
ori mai mare, i deci un timp de analiz de M ori mai mic. O modalitate simpl de
realizare a compresiei timpului este de a nregistra semnalul pe bucl de band
magnetic (utiliznd un magnetofon cu modulaie n frecven) la o vitez mai mic,
iar redarea s fie la o vitez mai mare, obinndu-se un factor maxim de accelerare
M=10. Utilizarea unei memorii numerice pentru nregistrarea semnalului permite
ns, cu mult uurin, creterea vitezei de mii de ori.
Aceste analizoare nu pot realiza analiza n timp real.
3.3.6. Analizorul cu filtre numerice
Un filtru numeric este un bloc de calcul numeric, care primete la intrare o
secven de valori numerice (format obinuit din eantioane din semnalul obinut de
la un traductor n mod continuu), execut o serie de operaii numerice asupra fiecrii
valori de intrare i furnizeaz, la ieire, cte un eantion, pentru fiecare eantion
primit la intrare.
Analizoarele n timp real cu filtre numerice sunt construite pentru limi de
band de 1/3 octava ( 23 %), deci cu lime de band procentual constant i sunt
destinate att pentru controlul ct i pentru diagnosticarea i monitorizarea mainilor
n funcionare. Sunt utilizate de asemenea la msurarea i analiza zgomotului.
3.3.7. Analizorul FFT
Trecerea semnalului din domeniul timp n domeniul frecven i invers, se
poate realiza cu ajutorul transformatei Fourier:
X(f)= )) t ( x ( = dt e ) t ( x
ift 2
+
110
x(t)= df e ) f ( X ) f ( X (
ift 2 1
+
=
n cazul semnalelor periodice, trecerea n domeniul frecvene se poate realiza
prin descompunerea n serie Fourier, n procesul de transformare fiind necesar
numai o perioada a semnalului.
Fig. 3.16
Fig. 3.17
Fourier, periodicitatea ntr-un domeniu determinnd o evoluie continu n cellalt
domeniu. Dac semnalul n domeniul timp este discret i periodic, spectrul obinut n
domeniul frecven va fi de asemenea discret i periodic (fig. 3.18).
Dac n domeniul timp semnalul este descris prin N eantioane ntr-o perioad,
n domeniul frecven spectrul va conine de asemenea N eantioane.
Fig. 3.18
Deoarece semnalul generat de traductor are o variaie continu, este necesar
trecerea semnalului printr-un bloc de eantionare, care conine i un convertor
analog-digital (fig. 3.19).
Un semnal continuu i periodic, n
domeniul timpului, este transformat ntr-un
spectru discret n domeniul frecven (fig. 3.16).
X(f
k
) =
2
T
2
T
t if 2
dt e ) t ( x
T
1
k
x(t) =
t if 2
k
k
k
k
e ) f ( X
+ =
=
Un semnal discret, aperiodic, va genera
un spectru continuu (fig. 3.17).
X(f) =
n
ift 2
n
n
n
e ) t ( x
=
=
x(t
n
)= dt e ) f ( X
f
1
2
fs
2
fs
iftn 2
s
Se evideniaz astfel simetria ntre
domeniile timp i frecven a transformatelor
X(f
k
)=
N
k
in 2
1 N
0 k
n
e ) t ( x
N
1
x(t
n
)=
N
k
in 2
1 N
0 k
k
e ) f ( X
Transformata discret Fourier se preteaz
la o evaluare direct prin metode numerice,
utiliznd avantajele tehnicii de calcul numeric.
n anul 1965 a fost elaborat un algoritm de calcul
rapid al transformatei discrete Fourier (F.F.T.).
111
Fig. 3.19
Algoritmul FFT consider o nregistrare din domeniul timp ca un bloc format
din N eantioane egal distanate, pe care le transform ntr-un bloc de N eantioane
egal distanate n domeniul frecven. Toate eantioanele din domeniul timpului sunt
necesare pentru calculul fiecrei linii din domeniul frecven.
Frecvena cea mai joas ce poate fi evideniat de analiza FFT este
determinat de lungimea nregistrrii n domeniul timpului.
Frecvena maxim ce poate fi evideniat este:
f
max
=
R
T
1
2
N
unde: T
R
- durata nregistrrii; N- numrul de eantioane care este fixat prin procesul
de implementare al algoritmului FFT (uzual N = 1024)
Modificarea valorii pentru f
max
se realizeaz prin schimbarea duratei
nregistrrii. Calculele necesare efecturii algoritmului FFT necesit un timp finit,
funcie de numrul de eantioane N, dar i de viteza procesorului utilizat.
Dac acest timp de calcul T
FFT
< T
R
atunci analiza se numete analiza n timp
real. Frecvena pentru care T
R
devine egal cu T
FFT
determin limea de band
analizat n timp real. Analizoarele de frecven ce folosesc tehnica FFT fac parte din
categoria analizoarelor n timp real, putnd furniza, practic instantaneu, o
reprezentare grafic a spectrului pe un display ncorporat, spectru care este continuu
reactualizat.
Viteza de msurare a analizorului FFT este determinat de rezoluia msurrii
i de timpul de calcul necesar transformrii.
Rezoluia n frecven a analizorului FFT este determinat de numrul de linii
spectrale i de disponibilitatea de a realiza Zoom FFT. Majoritatea analizoarelor
FFT actuale ofer 400 componente reale n domeniul frecven.
Domeniul dinamic apreciaz capacitatea aparatului de a analiza semnale cu
amplitudine mic n prezena unor semnale cu amplitudine mare.
Utilizare unei scri logaritmice pentru amplitudine permite reprezentarea
simultan a unor componente care au raportul amplitudinilor mai mare de 1000.
Medierea numeric urmrete att creterea preciziei msurrii, atunci cnd
componentele spectrului au amplitudini variabile, ct i curirea de componente
parazite introduse de nivelul ridicat al zgomotului de fond sau de vibraiile generate
de mainile vecine.
Eliminarea zgomotului i a altor componente parazite, se poate realiza prin
mediere sincron, care impune existena unui trigger sincronizat cu maina de la care
se culege semnalul, ceea ce permite obinerea n domeniul timp a mai multor
secvene de semnal, sincronizate, care sunt mediate nainte de realizarea
transformrii. Prin mediere, semnalele parazite, nesincronizate, vor fi atenuate mult,
sau chiar anulate.
112
Memorarea valorilor de vrf, pentru fiecare frecven, la un numr de secvene
din domeniul timpului, permite urmrirea evoluiei n timp a acestora, ceea ce este
util n cazul ncadrrii analizorului dinamic ntr-un sistem de monitorizare, valorile de
vrf evideniind schimbrile de sarcin sau de vitez.
Analizorul dinamic are interfa standard pentru conectarea la nregistratorul
numeric sau echipamentul de calcul, ceea ce creeaz multiple posibiliti de stocare
automat a datelor de analiz.
Pentru monitorizarea strii mainilor pot fi preferate analizoarele n timp real
cu lime de band procentual constant, cu utilizarea unei scri logaritmice pentru
frecven, iar pentru diagnoza deteriorrii se vor prefera analizoarele cu lime de
band constant pe scara liniar n frecven.
Cnd se urmrete realizarea unui control de calitate, prin monitorizarea
spectrului, este suficient efectuarea analizei pe un domeniu limitat de frecvene, i
este preferat analiza cu lime de band constant.
3.3.8. Analiza Zoom FFT
Atunci cnd se dorete o rezoluie mare pe o poriune limitat de spectru, se
folosete aa numita analiz Zoom FFT.
Fig. 3.20
3.4. Instrumentaia virtual pentru msurarea i analiza semnalului
vibroacustic
3.4.1. Consideraii generale
Dezvoltarea tehnicii de msurare a vibraiilor i zgomotului, precum i
dezvoltarea tehnicilor de procesare a semnalului, au permis importante perfecionri
ale sistemelor de msurare i analiz, care au determinat o cretere a preciziei i o
simplificare a metodelor pentru controlul vibroacustic al sistemelor mecanice.
Introducerea n schema de msurare a unui calculator cu echipamente
periferice, permite prelucrarea automat a semnalului, realizndu-se o reducere
Domeniul de interes, cuprins ntre frecvenele
f
1
i f
2
se selecteaz mutnd originea pentru domeniul
de frecven la valoarea f
1
, concomitent cu trecerea
semnalului printr-un filtru numeric trece jos, pentru
eliminarea tuturor componentelor, cu excepia benzii
cuprinse ntre f
1
i f
2
(fig. 3.20).
Tehnica Zoom FFT este util pentru analiza
unor semnale modulate cu o frecven joas (semnale
generate de de vibraiile roilor dinate, rulmeni),
analiza semnalelor care conin un numr mare de
armonici, pentru separarea unor rezonane cu
frecvene foarte apropiate etc.
113
substanial a timpului necesar controlului vibroacustic, o precizie ridicat,
posibiliti multiple de comparaie a rezultatelor n vederea optimizrii sistemului
mecanic, n legtur cu comportarea vibroacustic.
Cu ajutorul plcilor de achiziie de date, fluxul de date numerice sau analogice,
provenite de la traductorii de vibraii sau zgomot, poate fi prelucrat sau analizat.
Prelucrarea datelor numerice sau analogice prin intermediul limbajului de
programare, permite crearea sau simularea unor aparate de msurare i analiz
(instrumente virtuale). Principalul avantaj al instrumentelor virtuale de msurare i
analiz const n flexibilitatea acestora fa de instrumentele clasice, putnd fi foarte
uor transformate prin programare.
Interfaa unui instrument virtual conine diverse dispozitive i aparate de
msur i analiza ntr-o form grafic, asemntoare aparatelor i dispozitivelor
clasice reale. Un instrument virtual este un modul de program realizat sub form
grafic, astfel nct acesta s se apropie foarte mult de instrumentele fizice similare.
Un program performant care permite realizarea instrumentaiei virtuale este
programul LabVIEW. Programarea unei aplicaii LabVIEW se face pe principiul
fluxului de date, instrumentul virtual fiind n realitate un modul de program, care
poate fi realizat i executat independent, sau poate fi inclus ntr-o alt aplicaie.
3.4.2. Prelucrarea numeric a semnalelor vibroacustice
Un sistem de prelucrare a semnalelor este un sistem care prin structura sa este
capabil s preia o serie de informaii din exterior, s realizeze o transformare a
acestora dup o serie de reguli bine stabilite i s ofere la exterior un rezultat
(rspunsul sistemului) dependent de informaia primit la intrare i de structura
intern a sistemului.
Semnalul este o mrime msurabil, cu o anumit variaie n timp. Dup natura
mrimii, semnalele pot fi electrice, electromagnetice, optice, mecanice etc.
Semnalul analogic este un semnal a crui variaie n timp este continu.
n natur marea majoritate a semnalelor sunt analogice.
Semnalul discret se caracterizeaz prin aceia c are valori nenule la momente
discrete de timp, iar n afara acestor momente are valoare nul.
Semnalul numeric este un semnal reprezentat ca o niruire de numere ce indic
valoarea semnalului la un moment dat.
Sistemul numeric este un sistem n care informaia este transmis i prelucrat
n totalitate sau n cea mai mare parte sub form de semnale numerice.
innd cont de faptul c, n marea majoritate a cazurilor, n procesele ce au loc
n instalaiile industriale, n aparate electrice i electronice sau n alte procese ce se
dorete a fi urmrite, semnalele sunt sub form analogic, se pune problema
transformrii acestora n semnale numerice, pentru a putea fi prelucrate ulterior cu
sisteme numerice de calcul. Aceast conversie se realizeaz cu circuite speciale,
numite convertoare analog numerice (CAN).
Pentru obinerea semnalului numeric, dintr-un semnal analogic, trebuiesc
realizate trei operaii de baz:
114
eantionarea semnalului;
cuantizarea (evaluarea semnalului eantionat);
codarea (transformarea semnalului cuantificat n coduri numerice).
Eantionarea const n transformarea semnalului continuu de intrare ) (t x ntr-
un semnal discret ) nT ( x , adic ntr-o succesiune de impulsuri ce se succed cu o
frecven constant n timp i care au ca amplitudine valoarea semnalului analogic de
intrare, la momentele de timp respective.
Durata impulsurilor este foarte mic (teoretic zero), iar n intervalul de timp
dintre dou impulsuri succesive, valoarea semnalului eantionat este nul.
Pentru a obine un semnal eantionat este necesar ca n circuitul prin care
circul semnalul ) t ( x s se introduc un modul de eantionare.
Principial, un modul de eantionare poate fi considerat ca un ntreruptor
normal deschis, care se nchide pentru o perioad foarte scurt de timp, la momentele
nT t = , permind astfel semnalului de intrare s treac la ieire, dup care revine n
poziia deschis.
Dup comutator se obine semnalul eantionat:
)} nT ( x { ) t ( x
e
=
Fig. 3.22
Valorile ) nT ( x reprezint eantioanele prin care este reprezentat semnalul
) t ( x . Semnalul ) t ( x
e
din fig. 3.22 este idealizat, deoarece n realitate comutatorul
rmne nchis un interval mic, dar finit t , astfel c impulsurile sunt de durat finit.
Eantionarea prezentat n figura 3.22 este periodic, deoarece
T
K este
acionat periodic.
Intervalul de timp T reprezint perioada de eantionare, iar frecvena de
eantionare este dat de relaia T 1 f = , iar f 2 = se numete pulsaia de
eantionare. Semnalul eantionat este un semnal discretizat n timp.
Acesta poate fi reprezentat ca o funcie de variabil nT sau, raportnd acest
termen la T, ca o funcie de variabil numeric n.
Deci eantionarea periodic a unui semnal analogic const n construirea
secvenei de valori )} nT ( x { ) t ( x
e
= .
Modelul de studiu al eantionrii este prezentat n fig. 3.23
Conform acestui model putem scrie: ) t ( ) t ( x ) t ( x
T e
=
innd cont de faptul c:
=
=
n
T
) nT t ( ) t (
115
Fig. 3.23
Rezult:
=
=
n
e
) nT t ( ) nT ( x ) t ( x
n relaiile anterioare funcia ) t ( se numete funcie impuls Dirac.
Funcia ) t (
T
se numete funcie delta periodic sau pieptenele lui Dirac,
avnd valoarea 1 pentru Z n , T n t = i valoarea 0 n rest.
Reprezentarea grafic a acestor funcii este prezentat n fig. 3.24.
O problem important, de care trebuie s se in seama n cazul procesului de
eantionare, este frecvena minim de eantionare sau, corespunztor, perioada
maxim ntre dou eantioane succesive, astfel nct semnalul eantionat s descrie
cu suficient fidelitate semnalul iniial, i dac este nevoie, s permit refacerea
acestuia din urm.
Condiia care trebuie pus, conform criteriului lui Nyquist, este ca frecvena de
eantionare s fie de cel puin dou ori mai mare dect frecvena maxim ce apare n
semnalul ce urmeaz s fie eantionat:
2
T
2 T f 2 f
max
e max e
Dac eantionarea se realizeaz cu o frecven de eantionare cunoscut
e
f ,
frecvena maxim a semnalului ce poate fi corect eantionat este:
2 f f
e M
=
Dac semnalul nu satisface condiia
M max
f f < atunci eantionarea nu se va
realiza corect, aprnd erori numite erori de aliasing.
Pentru a elimina deformaiile semnalului datorate aliasingului, se practic o
filtrare a semnalului nainte de intrarea n modulul de eantionare cu un filtru trece
jos, ce are frecvena de tiere acordat la cel mult 2 f
e
. Un astfel de filtru se mai
numete i filtru de gard.
Deoarece filtrul de gard nu poate fi realizat n practic n mod ideal, blocarea
componentelor spectrale n vecintatea frecvenei de tiere nu este perfect i este
necesar s se lucreze cu filtrul acordat la o frecven limit mai mic dect 2 f
e
.
Fig. 3.24
116
Cuantizarea.
Prelucrarea numeric a semnalelor cu ajutorul calculatorului presupune
reprezentarea acestor semnale printr-un numr finit de valori discrete.
Discretizarea trebuie fcut nu doar n timp ci i n amplitudine, ceea ce se
realizeaz prin operaia de cuantizare. Aceasta se efectueaz prin alegerea unui numr
corespunztor, dar finit, de niveluri de cuantizare.
Cuantizarea const n aproximarea eantioanelor cu nite trepte, cu amplitudine
prestabilit. Fiecrui eantion i se atribuie o treapt creia i va corespunde ulterior o
valoare binar dat. Acceptnd o eroare convenabil, ca i n cazul eantionrii, avem
la dispoziie, printr-o succesiune de bii, o reprezentare binar aproximativ a
semnalului analogic ) t ( x . Deci fiecare eantion se exprim numeric printr-un numr
finit de bii, rezultnd secvena ) n ( x
Q
. Semnalul diferen:
) n ( x ) n ( x ) n ( e
Q
=
se numete zgomot de cuantificare. Pentru ca secvena ) n ( x
Q
s aib o semnificaie
corespunztoare, este necesar ca semnalul analogic ) t ( x s se ncadreze ntr-o band
limitat. Practic filtrul de limitare a benzii trebuie s aib o atenuare de cel puin
dB 40 pentru frecvene mai mari dect jumtate din frecvena de eantionare.
Distribuia zgomotului de cuantizare este funcie de modalitatea concret prin
care se efectueaz cuantizare. Deoarece exist un numr finit de nivele de cuantizare,
toate semnalele care depesc valoarea maxim
max
E , sau care se situeaz sub
valoarea cea mai mic (
max
E ), vor fi rotunjite la aceste valori.
n general, asemenea procese de depire a valorilor maxime i minime sunt
nlturate prin alegerea corespunztoare a treptei de cuantizare Q, precum i printr-o
scalare corespunztoare a semnalului de intrare ) n ( x .
n afara acestor cazuri limit, semnalul care d eroarea de cuantizare ) t ( e
n
satisface relaia:
N n ,
2
Q
e
2
Q
n
Eroarea de cuantizare poate fi privit ca o secven aleatorie. Secvena de
valori ) n ( x
Q
se poate obine i prin utilizarea altor tipuri de cuantizri, ca de exemplu
trunchierea, cnd semnalul este reprezentat prin cel mai mare nivel de cuantizare,
care nu depete semnalul. Trunchierea este echivalent cu o rotunjire cu mai mult
de jumtate din treapta de cuantizare.
Din observaiile anterioare, rezult c eroarea de cuantizare are valoare medie
nul n cazul rotunjirii i egal cu 2 Q n cazul trunchierii.
Secvena de ieire, presupus cu frecven infinit, se reprezint astfel:
) n ( h e ) n ( h ) n ( x ) t ( x
n Q
+ =
unde ) n ( h este rspunsul sistemului la impulsul unitate. Termenul drept din expresia
anterioar poate fi interpretat ca o sum de doi factori: o ieire de semnal -
) n ( h ) n ( x i o ieire de zgomot - ) n ( h e
n
. Aceti doi factori determin raportul
117
semnal / zgomot. Funcie de numrul de bii, raportul semnal / zgomot (
SZ
R ) este dat
de relaia:
] dB [ 2 , 1 b 6 R
SZ
=
unde b este numrul de bii utilizai pentru reprezentarea unui eantion.
Codarea este operaia n urma creia, fiecrui eantion cuantificat i se asociaz
un cuvnt de cod, adic un set de numere binare, n conformitate cu un cod stabilit.
Numrul de bii asociai fiecrui eantion se numete rezoluia eantionrii.
Cu ct aceast rezoluie este mai mare, cu att se obine un semnal numeric ce
aproximeaz mai bine semnalul analogic de intrare.
Codarea este realizat de un circuit special, denumit codificator zecimal-binar,
care are un numr de
b
2 intrri de date i un numr de b ieiri. La ieire se va obine
numrul binar corespunztor intrrii cu rang cel mai nalt.
3.4.3. Plci de achiziie
Pentru a putea controla un proces cu ajutorul tehnicii de calcul sunt necesare
dou operaii de baz:
preluarea din procesul a unor informaii referitoare la starea acestuia la un
moment dat (parametri de proces, stri ale acestuia, semnale de avarie, evoluia
unor mrimi n timp);
furnizarea de ctre echipamentul de calcul a unor semnale de comand sau
reglare.
Pentru ca un sistem de calcul, utilizat pe post de calculator de proces, s poat
ndeplini cele dou sarcini eseniale prezentate anterior, este necesar ca acesta s fie
echipat cu o plac de extensie special, capabil s realizeze interfaarea procesului
cu sistemul de calcul. O astfel de plac este cunoscut n literatura de specialitate sub
denumirea de plac de achiziie.
Dei denumirea acesteia ar sugera c o astfel de plac permite doar preluarea
de informaii din sistemul studiat, n cele mai multe cazuri plcile de achiziie au
posibiliti de lucru mult mai largi. Astfel, cu ajutorul unei astfel de plci se pot
realiza o serie de operaii cum ar fi:
achiziii de semnale numerice de la senzori sau traductori numerici;
achiziii de semnale analogice, care sunt transformate n semnale numerice cu
ajutorul convertoarelor analog-numerice existente pe plac.
Intrrile analogice se utilizeaz pentru cuplarea de senzori sau traductori ce
furnizeaz semnale analogice (accelerometre, senzori optici, senzori magnetici,
mrci tensometrice, senzori de temperatur etc.);
ieiri numerice pentru comanda efectorilor de tip bipoziional (relee,
comutatoare statice, pornirea i oprirea unor aparate etc.);
ieiri analogice, obinute din semnalele numerice furnizate de echipamentul de
calcul cu ajutorul convertoarelor numeric-analogice;
temporizri i contorizri de mare precizie;
sincronizarea unor procese (pornirea achiziiei, oprirea acesteia etc.).
118
Modul n care pot fi utilizate plcile de achiziie n sistemele de calcul poate
diferi foarte mult, funcie de complexitatea i performanele plcilor, a sistemului de
calcul i a programelor de prelucrare a datelor utilizate.
n cazul utilizrii de sisteme relativ modeste, cu plci cu performane reduse i
un soft simplu, de regul singura soluie aplicabil este cea indirect (off-line).
Aceasta const n faptul c informaia achiziionat din proces este transferat
de plac ntr-o memorie tampon sau pe disc, ntr-un fiier.
Dup terminarea procesului de achiziie, se lanseaz n execuie programul de
prelucrare a datelor culese din proces, iar acesta va furniza unele rezultate i
informaii referitoare la evoluia procesului pe parcursul achiziiei de date.
Aceast metod de prelucrare numeric a semnalelor este n general greoaie,
presupunnd multe intervenii manuale din partea operatorului. Ca urmare, metoda
este puin aplicabil n automatizarea proceselor ce necesit luarea de decizii n timp
real. Astfel de sisteme, cu aplicabilitate n condiii de laborator, permit realizarea de
prelucrri complexe a semnalelor cu cheltuieli modeste.
La cealalt extremitate se afl sistemele complexe de achiziie i prelucrare
numeric a semnalelor. Acestea au n componena lor plci de achiziie performante,
cu un numr mare de intrri i ieiri, iar calculatoarele utilizate au instalate pachete de
programe complexe de prelucrare a informaiei prin metode numerice, programe ce
pot lucra direct cu datele preluate din memoria tampon a plcilor de achiziie.
Aceste date sunt prelucrate imediat cu algoritmi performani i drept rezultat se
elaboreaz un rspuns cu privire la evoluia sistemului, rspuns folosit pentru
elaborarea de comenzi destinate procesului i care sunt transferate n exterior, ctre
efectorii procesului, prin intermediul aceleiai plci instalate n sistem.
Astfel de plci de achiziie, mpreun cu pachetele de programe aferente, sunt
produse i de firma National Instruments. Aceast firm deine actualmente un loc
privilegiat pe piaa sistemelor de achiziie de date, datorit faptului c pune la
dispoziie beneficiarilor soluii complete, att hard ct i soft. Sistemele produse de
National Instruments au o serie de caracteristici cum ar fi:
modularitate;
performane superioare;
flexibilitate n configurare;
plci de achiziie programabile soft etc.
3.4.4. Limbajul de programare LabVIEW
Pe lng marea diversitate de plci pentru achiziia de date, firma National
Instrumants a mai creat i un suport software foarte puternic pentru achiziia,
prelucrarea i analiza numeric a semnalelor. Pe lng performanele deosebite i
modularitatea acestor pachete de programe, ele sunt realizate astfel nct au un nalt
grad de compatibilitate cu produsele hardware oferite de aceiai firm.
Principalele produse software oferite de National Instruments sunt limbajele de
programare LabVIEW i LabWindows/CVI. Ambele sunt limbaje de programare
vizual, dar diferena esenial dintre ele este faptul c LabVIEW lucreaz ca un
119
interpretor i are o interfa de programare exclusiv grafic (att n privina realizrii
interfeei utilizator ct i n privina descrierii algoritmului i a fluxului de date), pe
cnd LabWindows/CVI este un compilator de limbaj C, a crui mediu de programare
permite realizarea interfeei cu utilizatorulu (Front Panel) n mod interactiv, prin
metode vizuale, dar algoritmii de calcul sunt implementai prin programare clasic,
utiliznd de regul limbajul ANSI C (acesta asigurnd o compatibilitate ntre diversele
platforme).
Limbajul grafic LabVIEW a aprut ntr-o prim variant n anul 1983.
Denumirea acestuia provine de la prescurtarea din limba englez Laboratory
Virtual Instrument Engineering Workbench. Acest limbaj grafic este un mijloc de
programare destinat controlului, analizei i afirii datelor.
Prin utilizarea lui, rapiditatea i uurina realizrii programelor crete
considerabil, datorit modului intuitiv de programare bazat pe elemente grafice ce
simbolizeaz subprograme (subinstrumente grafice). Pentru a realiza instrumentul
virtual dorit, aceste elemente trebuiesc plasate ntr-o diagram, iar transmitere
parametrilor i a semnalelor ntre diferitele subinstrumente ale diagramei se face prin
conectarea ntre ele a terminalelor elementelor grafice (operaie denumit cablare).
Traseele astfel realizate, stabilesc i ordinea n care vor fi apelate subinstumentele.
Un subinstrument virtual este un modul de program realizat sub form grafic
pentru a se apropia ct mai mult de instrumentul fizic. Subinstrumentele virtuale pot
fi realizate i testate independent, pentru ca mai apoi s fie integrate n alte
instrumente mai complexe, asemntor cu limbajele de programare clasice, la care
procedurile sunt integrate n programul principal. Mai mult, orice subinstrument
poate lucra independent, fr a necesita prezena unui instrument virtual care s-l
apeleze. De asemenea, orice instrument virtual poate deveni, cu modificri minore
care n realitate nu modific structura acestora, un subinstrument.
3.4.5. Structura aplicaiilor LabVIEW
Finalitatea programrii n limbajul de programare grafic LabVIEW este
realizarea unui instrument virtual. Un instrument virtual este un modul de program
realizat sub form grafic, astfel nct acesta se apropie foarte mult de instrumentele
fizice similare. Orice aplicaie realizat cu programul LabVIEW este nregistrat pe
discul magnetic cu numele de Virtual Instrument sau pe scurt VI.
Utilizatorii programului LabVIEW utilizeaz i manevreaz instrumentele
virtuale ntr-un mod asemntor cu lucrul cu instrumentele reale.
Marele avantaj al utilizrii instrumentaiei virtuale este faptul c acestea pot fi
uor transformate prin programare. n cazul instrumentelor fizice, structura,
caracteristicile tehnice, modul de operare cu acestea sunt rigide, acestea fiind definite
la fabricarea instrumentului, iar ulterior nu mai pot fi modificate de ctre utilizator.
Dac se folosete instrumentaia virtual, utilizatorul primete o colecie
(bibliotec) de elemente separate, pe care le poate combina dup propriile dorine,
obinnd instrumentul dorit, cu caracteristicile cerute de problema concret ce trebuie
120
rezolvat. De asemenea, limbajul LabVIEW ofer o mare varietate de exemple, sub
form de instrumente deja implementate, care pot fi de asemenea modificate i aduse
la forma dorit. O aplicaie LabVIEW este compus n mare, din dou pri (ferestre)
distincte, dar care, n momentul rulrii aplicaiei, realizeaz un schimb continuu de
date ntre ele:
- o fereastr panou (Panel), pe care se afieaz instrumentele virtuale necesare
aplicaiei. Aceste instrumente pot fi indicatoare (grafice, numerice, text etc.) sau
elemente de control (comutatoare, poteniometre, liste de selecie etc.).
Fereastra panou este de fapt panoul de comand de la care se va comanda
instrumentul virtual, atunci cnd este pus n funciune. Privind aplicaia ca un
program, fereastra panou conine variabilele de intrare i de ieire necesare.
a) b)
Fig. 3.25.
- o fereastr diagram (Diagram) n care se realizeaz programul propriu-zis al
aplicaiei, realizat sub forma unei diagrame a fluxului de date (asemntoare unei
scheme bloc) cu simboluri care reprezint diverse funcii i subinstrumente virtuale i
legturile necesare ntre ele. Construirea modulelor se face pe principiul ncapsulrii.
n figura 3.25 este prezentat un analizor dinamic pentru controlul vibroacustic
al sistemelor mecanice, compus din fereastra panou (fig.3.25.a) i fereastra diagram
(fig.3.25.b).
3.5. Filtrarea digital a semnalului vibroacustic
3.5.1. Generaliti
O problem dificil ntlnit la controlul vibroacustic al sistemelor mecanice
este filtrarea semnalelor primite de la traductorul de semnal.
Instrumentele de procesare modern a semnalelor digitale au fcut posibil
nlocuirea filtrelor analogice, cu filtre digitale n aplicaii care necesit flexibilitate i
programabilitate. Filtrele digitale au urmtoarele avantaje, n raport ce cele analogice:
sunt programabile software;
sunt stabile i previzibile;
nu sunt afectate de erori dependente de temperatur sau umiditate i nu
necesit folosirea unor componente de precizie;
121
ofer un raport superior performan/cost.
Filtrele digitale din LabVIEW permit controlul unor parametri ca: ordinul
filtrului, frecvenele de tiere, gradul de ondulaie i atenuarea de stop-band.
Filtrele digitale VI (Virtual Instrument) descrise n aceast seciune au toate
caracteristicile necesare de proiectare, calcul, managementul memoriei i filtrarea
intern a datelor, facilitile fiind transparente pentru utilizator; acesta nu trebuie s
fie expert n filtre digitale sau teoria filtrelor digitale pentru a procesa datele.
n continuare vom discuta teorema eantionrii pentru a asigura o mai bun
nelegere a parametrilor filtrelor i modul n care acetia interacioneaz cu
parametrii de intrare.
Conform teoremei eantionrii, un semnal continuu n domeniul timp poate fi
reconstituit din eantioane egal distanate, discrete, dac frecvena de eantionare este
de cel puin dou ori mai mare dect cea mai mare frecven din spectrul semnalului.
Se poate spune c semnalul cercetat se poate eantiona la intervale egal
distanate de timp t fr a pierde informaii. Parametrul t se numete interval de
eantionare. Se poate obine frecvena de eantionare
s
f din intervalul de eantionare
cu formula: t / 1 f
s
= , ceea ce nseamn c, n concordan cu teorema eantionrii,
cea mai ridicat frecven pe care sistemul digital o poate procesa este: 2 / f f
s Nyq
=
i este cunoscut sub numele de frecven Nyquist. Aceast afirmaie este valabil i
pentru filtrele digitale.
3.5.2. Filtre cu rspuns infinit la impuls
Filtrele cu rspuns infinit la impuls (IRI), sunt filtre digitale cu impulsuri de
rspuns care pot fi teoretic de durat infinit. Ecuaia general care caracterizeaz
filtrele IRI este:
=
1 N
1 k
k i k
1 N
0 j
j i j
0
i
a b
y a x b
a
1
y
unde
b
N este numrul coeficienilor urmtori lui
j
b , iar
a
N este numrul
coeficienilor anteriori lui
k
a .
n proiectarea majoritii filtrelor digitale IRI (i n toate filtrele LabVIEW de
tip IRI), coeficientul
o
a este 1. Eantionul de ieire la indexul de eantionare i este
suma valorilor scalate de intrare prezente i anterioare (
i
x i
j i
x
cnd 0 j ) i a
valorilor scalate de ieire anterioare. Rspunsul unui filtru general de tip IRI la un
impuls ( 1 x
0
= i 0 x
j i
=
pentru ( ) 0 i ) se numete impuls de rspuns al
filtrului. Impulsul de rspuns al filtrului este ntr-adevr de lungime infinit pentru
coeficieni nenuli.
n aplicaii practice, totui, impulsul de rspuns al filtrelor stabile de tip IRI
tinde spre zero dup un numr finit de eantioane.
Filtrele IRI n LabVIEW au urmtoarele caracteristici:
122
Indicii negativi ai ecuaiei de mai sus sunt egalai cu zero, la iniializarea
filtrului VI;
Deoarece starea iniial a filtrului este considerat a fi zero (indicii negativi),
un regim tranzitoriu proporional cu ordinul filtrului apare nainte ca sistemul
s ajung la un regim stabil. Durata rspunsului tranzitoriu, sau ntrzierea,
pentru filtrele trece-jos sau trece-sus este egal cu ordinul filtrului;
Durata rspunsului tranzitoriu pentru filtrele trece-band i stop-band este
dublul ordinului filtrului.
Numrul de elemente n secvena filtrat este egal cu numrul de elemente din
secvena de intrare. Filtrul pstreaz valoarea strii filtrului cnd filtrarea este
complet. Avantajul filtrelor digitale IRI, comparativ cu filtrele cu impuls de rspuns
finit (IRF) este c filtrele IRI necesit de obicei mai puini coeficieni pentru a efectua
operaii de filtrare similare. Astfel, filtrele IRI execut filtrarea mult mai repede i nu
necesit resurse suplimentare de memorie, deoarece calculul se face direct.
Dezavantajul filtrelor IRI este c faza de rspuns este neliniar.
Dac aplicaia nu necesit informaii despre faz, cum ar fi monitorizarea
simpl a semnalului, folosirea filtrelor IRI este indicat. Se recomand folosirea
filtrelor IRF pentru aplicaii care necesit o faz de rspuns liniar.
Filtrele IRI sunt cunoscute i sub denumirea de filtre recursive sau medie-
mobil autoregresive (ARMA autoregressive moving-average).
3.5.3. Filtrare IRI de tip cascad
Filtrele IRI de tip direct sunt de multe ori sensibile la erorile introduse de
cuantificarea coeficienilor i de limitele computaionale ale preciziei.
n plus, un filtru proiectat astfel nct s fie stabil, poate deveni instabil odat
cu creterea lungimii coeficienilor, care este proporional cu ordinul filtrului.
O structur mai puin sensibil poate fi obinut prin mprirea funciei de
transfer din forma direct n seciuni de ordin inferior, sau nivele de filtrare.
Forma direct a funciei de transfer a filtrului, poate fi scris ca raport al
transformatelor z, dup cum urmeaz:
) 1 N (
1 N
1
1
) 1 N (
1 N
1
1 0
a
a
b
b
z a z a 1
z b z b b
) z ( H
+ +
+ + +
=
K
K
Prin mprirea ecuaiei n seciuni de ordin secund, funcia de transfer a
filtrului devine un produs de funcii de filtrare de ordin secund:
=
+ +
+ +
=
s
N
1 k
2
k 2
1
1
2
k 2
1
k 1 k 0
z a z a 1
z b z b b
) z ( H
K
,
unde
2
N
N
a
s
= este cel mai mare ntreg, mai mic sau egal cu
2
N
a
i
b a
N N > .
Aceast nou structur de filtru poate fi descris ca o cascad de filtre de ordin
secund. Fiecare stagiu individual este implementat folosind forma direct a structurii
de filtrare, deoarece necesit un numr minim de operaii aritmetice i un numr
123
minim de elemente de ntrziere (stri interne ale filtrului). Fiecare stagiu are o
intrare, o ieire i dou stri interne anterioare ( [ ] 1 i s
k
i [ ] 2 i s
k
).
Pentru filtrele cu o singur frecven de tiere (trece-jos i trece-sus), stagiile
de filtrare de ordinul II pot fi proiectate direct. Filtrul general de tip IRI trece-jos sau
trece-sus conine filtre de ordin secund n cascad.
Pentru filtrele cu dou frecvene de tiere (trece-band i stop-band), stagiile
de filtrare de ordinul IV reprezint o form mult mai natural. Filtrul general de tip
IRI trece-band sau stop-band conine filtre de ordinul IV n cascad.
3.5.4. Filtre Butterworth
Rspunsul n frecven al filtrelor Butterworth este uniform la toate
frecvenele, avnd i o descretere monoton de la frecvenele de tiere specificate.
Filtrele Butterworth sunt de lime maxim n trece-band i zero n stop-
band. n fig. 3.26 este dat rspunsul unui filtru Butterworth trece-jos. Avantajul
filtrelor Butterworth este o descretere uniform i monoton a frecvenei de rspuns.
Odat setat frecvena de tiere, LabVIEW seteaz panta tranziiei proporional cu
ordinul filtrului. Filtrele Butterworth de ordin superior se apropie de rspunsul ideal
al unui filtru trece-jos.
Fig. 3.26
3.5.5. Filtre Chebyshev
Filtrele Butterworth nu ofer ntotdeauna o aproximare a rspunsului filtrului
ideal, datorit suprapunerii lente dintre banda de trecere (poriunea de interes a
spectrului) i banda de stop (poriunea nedorit a spectrului).
Filtrele Chebyshev minimizeaz eroarea, n banda de trecere, prin cutarea
valorii absolute maxime a diferenei dintre rspunsul filtrului ideal i rspunsul de
filtrare dorit (eroarea maxim tolerabil n banda de trecere).
n fig. 3.27. este dat rspunsul unui filtru Chebyshev trece-jos. Se observ c
rspunsul de ondulaie echivalent n banda de trecere este constrns de eroarea de
ondulaie maxim tolerabil i suprapunerea ascuit apare n banda de stop.
124
Fig. 3.27
Avantajul filtrelor Chebyshev, comparativ cu filtrele Butterworth, este c
filtrele Chebyshev sunt caracterizate de o tranziie mai abrupt (ascuit) ntre banda
de trecere i banda de stop la un ordin mai redus al filtrului. Astfel se obin erori
absolute mai mici i viteze mai mari de execuie.
3.5.6. Filtre Chebyshev II sau filtre Chebyshev inverse
Filtrele Chebyshev II, cunoscute i sub denumirea de filtre Chebyshev inverse,
sunt similare cu filtrele Chebyshev, cu excepia faptului c filtrele Chebyshev II
distribuie eroarea peste banda de stop (opus benzii de trecere), i filtrele Chebyshev II
au limea maxim n banda de trecere (opus benzii de stop).
Filtrele Chebyshev II minimizeaz eroarea de vrf n banda de stop prin
cutarea valorii maxime absolute a diferenei dintre filtrul ideal i rspunsul de
filtrare dorit. n fig. 3.28. este dat rspunsul unui filtru Chebyshev II trece-jos.
Fig. 3.28.
Se observ c rspunsul de ondulaie echivalent n banda de trecere este
constrns de eroarea de ondulaie maxim tolerabil i suprapunerea monoton i
uniform apare n banda de stop. Avantajul filtrelor Chebyshev II comparativ cu
filtrele Butterworth este c filtrele Chebyshev II sunt caracterizate de o tranziie mai
abrupt (ascuit) ntre banda de trecere i banda de stop la un ordin mai redus al
filtrului. Astfel se obin erori absolute mai mici i viteze mai mari de execuie. Un
avantaj al filtrelor Chebyshev II fa de filtrele obinuite Chebyshev este distribuia
erorii n banda de stop n locul benzii de trecere.
125
4
CONTROLUL VIBROACUSTIC AL SISTEMELOR
MECANICE
4.1. Controlul prin vibraii
n funcionarea mainilor apar fenomene dinamice care genereaz vibraii.
Controlul prin vibraii al mainilor evideniaz modificri la nivelul forelor, al
solicitrilor din sistem sau la nivelul traseului undelor elastice i se realizeaz prin
msurarea vibraiilor mecanice. Micarea vibratorie ntr-un punct al unui sistem
elastic poate fi rspunsul la o excitaie aplicat sistemului, caracteristicile micrii
depinznd de proprietile dinamice ale acestuia (fig. 4.1).
Fig. 4.1
Excitaia poate fi dinamic exprimat prin fore, momente sau presiuni, sau
cinematic exprimat prin deplasarea, viteza sau acceleraia unui punct al
sistemului. La fel i rspunsul poate descrie micarea unui punct al sistemului sau
fora transmis n acel punct. Relaia excitaie rspuns depinde de caracteristicile
sistemului. Msurarea vibraiilor pentru control poate fi realizat n trei scopuri:
a) - msurarea rspunsurilor, n vederea comparrii cu limitele admisibile
stabilite prin standarde i norme;
b) - msurarea excitaiilor, n vederea ntocmirii programelor de ncercri la
vibraii;
c) - msurarea concomitent a excitaiei i rspunsului, pentru determinarea
caracteristicilor dinamice ale sistemului.
Prima categorie de msurtori se realizeaz n scopul stabilirii efectului nociv
al vibraiilor asupra oamenilor i cldirilor, pentru stabilirea strii de uzur a
mainilor, pentru controlul de calitate al produselor etc.
A doua categorie de msurri are drept scop identificarea surselor
perturbatoare i a legii de variaie n timp a acestora.
A treia categorie de msurri se face de obicei n condiii impuse de
experimentator, unica excitaie fiind o for (cuplu) sau deplasare armonic, sau un
impuls de form cunoscut.
La msurarea excitaiei sau rspunsului unui sistem elastic, intervin trei
categorii de mrimi:
mrimi care caracterizeaz micarea unui punct sau a unui element (deplasarea,
viteza, acceleraia);
mrimi care caracterizeaz solicitarea (fore, cupluri etc.)
mrimi auxiliare (frecvene, turaia, unghiul de faz etc.)
Excitaie Rspuns
Sistem elastic
126
O prim categorie de msurri urmresc desfurarea n timp a fenomenelor
vibratorii. Controlul global, de regul, consider una din caracteristicile vibraiei,
deplasare, vitez sau acceleraie, mediat n timp (valoare medie sau eficace) pe care
o compar cu limite prestabilite la nivelul ansamblului, dar n corelaie cu
funcionarea unor subansamble sau organe.
Depirea acestor limite conduce la decizii de modificare a regimului sau de
oprire pentru ntreinere i reparaii.
Limitele pentru vibraii, date n norme, au un caracter general, orientativ, iar
pentru o apreciere corect cu privire la starea de funcionare a mainilor, ndeosebi a
celor de mare complexitate i dimensiuni, necesit msurri de vibraii chiar pe
mainile analizate pentru determinarea concret a strii normale.
Fig. 4.2
Depirea cu 6-8 dB a nivelului de vibraii pentru starea normal indic
modificri notabile a strii de funcionare, iar depirea cu 20 dB (pentru frecvene
<1 kHz), indic defeciuni grave i necesitatea opririi pentru remedieri (fig. 4.2).
A doua categorie de msurri urmresc analiza n frecven a vibraiilor, prin
msurarea spectrului de frecven. Spectrul de frecven este util n procesul de
control, diagnosticare i monitorizare a mainilor.
Pentru identificarea surselor de zgomot i vibraii, din funcionarea mainilor,
se face o corelare a frecvenelor la care spectrul de frecven, determinat
experimental, prezint maxime, cu frecvenele surselor posibile de vibraii,
determinate teoretic pe baza parametrilor funcionali i constructivi ai sistemului cum
ar fi: turaia, numrul de dini ai roilor dinate, numrul corpurilor de rostogolire la
un rulment, numrul paletelor la o elice, numrul de nfurri la mainile electrice
etc. n general este util msurarea acelor cantiti care descriu cel mai adecvat
micarea vibratorie.
n cazul vibraiilor armonice, intensitatea acestora este caracterizat de
elongaia maxim. n cazul vibraiilor complexe, se recomand msurarea valorii
eficace (rdcina mediei ptratice).
Dintre cei trei parametri cinematici (vitez, acceleraie, deplasare) se
recomand msurarea vitezei, deoarece s-a observat c la multe maini, n limitele
turaiilor uzuale de lucru, spectrul de viteze este aproximativ constant.
n cazul vibraiilor armonice, ntre cei trei parametri cinematici se pot scrie
relaiile:
x x x
2
= = & & &
127
Din aceast cauz, msurrile de acceleraii tind s accentueze componentele
de nalt frecven, iar msurarea deplasrilor accentueaz componentele de joas
frecven (fig. 4.3).
Fig. 4.3
Totui, n alegerea mrimii msurate se ine cont i de limitele aparaturii de
msur, n ceea ce privete frecvena i amplitudinea vibraiilor.
Creterea preciziei n controlul vibroacustic se poate realiza prin:
creterea i sistematizarea volumului de informaii referitoare la
funcionarea normal sau cu diferite defecte a mainilor;
perfecionarea tehnicii experimentale n ceea ce privete traductorii,
condiionarea i ndeosebi procesarea semnalului;
corelarea rezultatelor experimentale cu consideraii i date teoretice pentru
identificarea surselor de vibraii sau a traseului de und.
4.2. Controlul prin zgomot
Cercetrile teoretice i experimentale au demonstrat c ntre nivelul de vibraii
i cel de zgomot, ntre caracteristicile vibraiilor i ale zgomotelor generate n
funcionare de sistemele mecanice sunt corelaii evidente.
Controlul prin zgomot a strii de funcionare a mainilor apare ca o soluie
imediat, mai ales n aprecierile subiective, pentru simplitatea i productivitatea
procedeului, mai ales pentru determinarea calitii produselor.
Controlul prin zgomot este dificil datorit condiiilor de mediu n care se face
msurarea, cu mai mult surse ce funcioneaz concomitent, precum i cu elemente de
reverberaie care sunt aproape inevitabile.
Pentru msurrile pe flux tehnologic, pentru subansamble (motoare, cutii de
vitez etc.) se recurge la camere cu izolare acustic fa de alte surse.
Unele aprecieri subiective (bti, fluierturi etc.) pot fi studiate prin analiza
obiectiv n frecven, cu vrfuri n frecven i implicit cu particulariti de
funcionare a componentelor (joc de tachei, abateri de poziie pentru axele roilor
dinate etc.). Efectul altor surse din mediul ambiant, al reverberaiei se nltur
eficient prin msurri n condiii de cmp liber artificial (camer anecoid).
128
n camera anecoid se pot determina i: puterea acustic a componentelor,
corelaiile vibraii-zgomot etc.
Cum costurile de amenajare a camerei anecoide sunt ridicate, acestea sunt utile
pentru mainile i aparatura de dimensiuni relativ reduse.
Pentru mainile i utilajele de mari dimensiuni, cu numeroase surse de zgomot,
se poate realiza, pentru controlul prin zgomot, msurarea n cmp apropiat, n situ,
pe baza unor experimentri prealabile.
n ultimul timp, dezvoltarea tehnicilor de procesare a semnalului digital, a
permis, cu relativ uurin, aplicarea metodei de evaluare i separare a surselor
acustice prin intensitate acustic.
4.2.1.Condiii pentru msurarea zgomotului
Msurarea caracteristicilor fizice ale zgomotului generat de maini i utilaje
urmrete urmtoarele obiective:
controlul de calitate prin zgomot, n scopul selecionrii produselor din acest
punct de vedere;
depistarea i evidenierea prin diagnostic a unor defecte de construcie, de
execuie sau de montaj;
compararea zgomotului emis de maini cu aceleai caracteristici;
determinarea nivelului de zgomot n scopul determinrii efectelor pe care le au
msurile de combatere.
Pentru efectuarea corect a msurrilor de zgomot se impun unele condiii
generale, iniiale, referitoare la:
cmpul acustic n care se fac msurrile;
plasarea microfonului n raport cu sursa acustic;
criteriile de apreciere ale zgomotului.
Msurrile de zgomot pentru control necesit, n primul rnd, condiii de cmp
acustic liber i separare zgomotului studiat de alte zgomote strine de surs.
Aceste condiii sunt realizate n camere anecoide, pentru surse de dimensiuni
mici sau medii. Pentru controlul n flux, innd seama de dificultile de amplasare a
camerelor anecoide, se utilizeaz camere de izolare acustic.
n cazul surselor de dimensiuni mari, pentru care construirea unor camere
anecoide ar fi dificil, zgomotul poate fi studiat, n anumite limite, n condiii de
cmp apropiat. n acest caz se recomand msurarea intensitii acustice.
Pentru a caracteriza o anumit surs de zgomot este necesar s se precizeze
puterea acustic emis, spectrul de frecven i factorul de directivitate.
Caracteristica de zgomot determinat pe baza rezultatelor msurrii, se
compar cu limitele admise de normele n vigoare sau cu un etalon de referin.
n timpul msurtorilor trebuie ca zgomotul de fond perturbator (cnd maina
nu funcioneaz) s fie constant, iar nivelul su acustic n tot spectrul de frecven s
fie cu cel puin 10dB mai mic dect nivelul acustic cnd maina funcioneaz.
129
Deoarece mainile, n general, nu produc un cmp acustic uniform, este
necesar s se fac msurtori n mai multe puncte n jurul lor, situate pe o suprafa
ipotetic de form semisferic (fig. 4.4.), cubic sau paralelipipedic (fig. 4.5.).
Fig. 4.4.
n care L
i
este nivelul presiunii acustice n punctul i.
Amplasarea punctelor de msurare depinde de mrimea i forma obiectului testat.
Pentru : L
max
<lm i
d
l
2 - semisfer;
L
max
>lm i
d
l
>2 - paralelipiped
Fig. 4.5.
Distana dintre microfon i surs
depinde de dimensiunile ncperii n care
se efectueaz msurrile, de nivelul
zgomotului de fond, de mrimea i forma
mainii i de gradul de uniformitate al
cmpului acustic produs de main.
Aprecierea nivelului zgomotului emis de o
main se face cu ajutorul nivelului
ponderat A al presiunii acustice L
A
, al
nivelului presiunii acustice msurat cu un
filtru de octav (spectrul zgomotului), al
nivelului puterii acustice L
P
i al nivelului
mediu al presiunii acustice L
m
care se
determin cu relaia:
=
=
n
1 i
10 / Li
m
10
n
1
lg 10 L
130
n care : L
max
- este dimensiunea liniar maxim a mainii;
L - lungimea;
d - diametrul sau limea mainii testate.
n cazul n care suprafaa ipotetic este o semisfer, se pot alege 8 sau 6 puncte
de msurare. Distana de la suprafaa obiectului de ncercat, la suprafaa de msurare
trebuie s fie de minimum 1m.
Microfonul se monteaz n fiecare punct dup direcia normalei la suprafaa
ipotetic de explorare i se protejeaz prin dispozitive speciale de curenii de aer
generai de funcionarea mainii.
Amplasarea punctelor de msurare n cazul unei suprafee ipotetice de form
paralelipipedic se face ca n fig. 4.5.
4.2.2.Camere anecoide
Camera anecoid (surd) reprezint o ncpere, izolat cu material
fonoabsorbant mpotriva zgomotelor externe i izolat antivibratoriu, n care sunetele
sunt absorbite aproape integral (99%) la incidena pe suprafeele limitrofe (fig. 4.6).
Camerele anecoide produc artificial condiiile cmpului acustic liber, fr unde
reflectate, fr influena altor surse i prezint unele avantaje n cazul controlului prin
zgomot. Dezavantajele sunt determinate de costul ridicat, de aproximativ 10 ori mai
mare dect n cazul camerei reverberante.
Camerele anecoide se cptuesc cu prisme sau corpuri cu form neregulat din
fibr mineral sau alt material fonoabsorbant, fiind prevzute cu izolaie
antivibratorie, podea din plas, ventilaie etc.
Fig. 4.6.
Calitile camerei anecoide se pot aprecia cu ajutorul urmtoarelor
caracteristici:
coeficientul de reflexie = 1- care este raportul dintre presiunea acustic a
sunetului reflectat i presiunea acustic a sunetului incident.
Acesta depinde de caracteristicile materialului fonoabsorbant, de forma i
131
dimensiunile prismelor absorbante.
abaterea de la legea 1/R d indicaii cu privire la natura cmpului acustic din
camera anecoid, n ceea ce privete diferenele fa de condiiile cmpului
acustic liber;
pentru izolaia fonic fa de exterior se recomand atenuri de 60 75dB,
astfel nct zgomotul de fond din camer s fie situat sub pragul de audibilitate;
izolaia antivibratorie, pe izolatori din cauciuc sintetic, trebuie s asigure o
frecven proprie redus (<10Hz).
4.2.3.Norme privind nivelurile admisibile de zgomot
Efectul nociv al zgomotului asupra organismului uman, a impus necesitatea
stabilirii unor nivele limit pentru zgomot, nivele ce depind de:
aspectul fizic al zgomotului;
modul n care acesta acioneaz asupra organismului uman i stingherete
munca;
posibilitile tehnice de aplicare a msurilor de combatere a zgomotului;
condiii economice.
Fig. 4.7
Pentru asigurarea proteciei
organismului uman sub raportul efectelor
locale (evitarea hipoacuziei profesionale),
nivelul global admis pentru zgomotul la
locul demunc se stabilete la valoarea de
90dB(A), care este nivelul acustic
echivalent.
Pentru estimarea i normarea
zgomotului se recomand utilizarea
familiei de curbe, avnd criterii de
zgomot Cz de la 0 la 115, curbele
limitnd nivelurile n 8 benzi de cte o
octav, cu frecvenele medii de: 63, 125,
250, 500, 1000, 2000, 4000, 8000 Hz
(fig. 4.7).
Recomandrile privind protecia
sub raportul efectelor generale se aplic
pentru locurile de munc la care se
efectueaz lucrri care solicit o
concentrare evident a ateniei.
n aceste cazuri nivelul global
admis variaz ntre 50 i 80 dB(A), iar
spectrul de frecven este limitat de
curbele C
z
45 i C
z
75.
132
4.3. Controlul prin intensitate acustic
4.3.1. Introducere
Controlul prin zgomot al mainilor complexe, n condiii de exploatare,
prezint o serie de dificulti:
condiiile de mediu nu satisfac, de regul, cerinele stricte de cmp liber sau
difuz (reverberant);
rezultatele sunt puternic influenate de zgomotul de fond sau de zgomotul altor
surse de zgomot;
spaiul insuficient nu permite realizarea suprafeelor de msurare tip semisfer
sau paralelipiped, cu plasarea microfoanelor la distane mai mari de (lungimea de
und analizat) sau la cel puin 2 3 ori cea mai mare dimensiune a sursei zgomot.
ntr-o msur apreciabil, aceste dificulti pot fi nlturate prin msurarea
intensitii acustice, cu consecine favorabile n precizia controlului, n
reproductibilitatea rezultatelor.
Tehnica msurrii intensitii acustice prezint interes pentru:
determinarea puterii acustice radiate de surse acustice;
localizarea surselor acustice;
determinarea absorbiei acustice;
determinarea pierderilor acustice prin transmisie.
Spre deosebire de presiunea acustic care este o mrime scalar, intensitatea
acustic este un vector care indic mrimea i direcia fluxului de energie acustic
pentru un punct dat, n W / m
2
.
Intensitatea acustic reprezint fluxul de energie acustic care strbate unitatea
de suprafa, perpendicular pe direcia de propagare a sunetului, n unitatea de timp.
c
p
v . p pvdt
T
1
lim I
0
2
T
0
= = =
[W/m
2
]
Unde: p = presiunea acustic;
v = viteza undei plane;
o
= densitatea aerului n stare de repaus;
c = viteza sunetului n aer, n stare de repaus.
Pentru c intensiatea acustic variaz n limite foarte largi, se utilizeaz
frecvent mrimea logaritmic, nivelul de intensitate acustic, definit prin relaia:
L
I
=10lg(I/I
0
) [dB]
unde: I = intensitatea acustic msurat, iar I
o
este valoarea de referin.
Pentru sunete care se propag n aer I
o
= 10
-12
W / m
2
.
n cazul unor unde sonore care se propag ntr-un cmp liber, intensitatea
acustic se poate calcula cu relaia:
I = p
2
/ c, unde produsul c se numete impedana caracteristic a mediului.
Rezult c intensitatea acustic se poate determina prin intermediul presiunii
acustice.
133
Intensitatea acustic se definete ca raportul dintre energia dE
r
care trece prin
elementul de arie dA, perpendicular ca poziie pe direcia de propagare a undei
acustice, n intervalul de timp dt i produsul dAdt (fig. 4.8).
Fig.4.8
poziii apropiate; = densitatea mediului; t = timpul; r = distana dintre
microfoane.
n figura 4.9 se prezint schema bloc de procesare a semnalului pentru
msurarea direct a intensitii acustice.
M = microfoane, PA = preamplificatoare, A = amplificator, X = circuit de nmulire,
F = filtru 1/3 octava, = sumator,
=integrator, = circuit de nmulire.
Fig. 4.9
Sonda pentru intensitate acustic (fig.4.10) se realizeaz prin dispunerea fa
n fa a dou microfoane identice, cu caracteristici plate de frecven n domeniul
studiat, separate printr-un distanier cu lungime r, ales n concordan cu domeniul
de frecven analizat i cu mrimea microfonului.
Fig. 4.10
Fie o direcie dat r: I
r
= < p (t).u
r
(t) >unde
u
r
(t)=dr/dt reprezint viteza particulei de fluid pe
direcia r, iar p(t) este presiunea acustic, parantezele
indicnd medierea n timp.
Se poate arta c: dt ) p p (
) r (
1
u
A B r
=
,
pentru: r << ; unde: p
A
i p
B
sunt presiunile n dou
r
134
Rezultatele msurrii intensitii acustice cu ajutorul sondei cu dou
microfoane sunt influenate de urmtoarele cauze:
efecte de presiune, considerate prin corecia: L
IP
= 10lg(p
a
/p
o
), T
o
= 273K
unde p
o
10 Pa, iar p
a
este presiunea atmosferic msurat cu barometrul;
efecte de temperatur, considerate prin corecia: L
IT
=10lg(T/T
0
)
unde T
0
= 273 K iar T este temperatura pentru mediul ambiant;
efectul frecvenelor mari: L
=10lg( I /I)
unde: I = intensitatea acustic msurat; I = intensitatea acustic real.
Odat cu creterea distanei trebuie utilizate distaniere ct mai scurte;
efectul de cmp apropiat apare atunci cnd intensitatea acustic are valori
diferite n dreptul celor dou microfoane, dac distana dintre sond i sursa
acustic are acelai ordin de mrime ca distana dintre microfoane.
Eroarea se reduce sub 1 dB dac raportul distanelor este mai mare de 23,
ceea ce este uor de realizat;
efectul frecvenelor joase.
La distane r reduse i la frecvene joase, erorile de apreciere cresc, dac este
o diferen de faz ntre cele dou canale de msur.
La propagarea n cmp acustic liber, intensitatea se poate determina i din
presiunea acustic.
c
p
v . p I
o
2
ef
= =
4.3.2. Msurarea puterii acustice cu ajutorul intensitii acustice
Puterea radiat de o surs se poate determina prin msurarea intensitii
acustice pe o suprafa convenabil care acoper sursa (fig. 4.11).
Fig. 4.11
cmpului acustic difuz, cu o densitate de energie acustic constant n spaiu.
Msurarea intensitii acustice poate fi realizat i n cmp acustic apropiat,
fr restricii de reflexie acustic a mediului ambiant sau de zgomot de fond.
dA I A d I P
S
n
S
= =
r r
Puterea acustic prezint interes att
pentru diagnosticarea calitii globale a
mainilor i utilajelor ct i pentru
compararea acestora.
Msurarea puterii acustice pe baza
nivelului de presiune acustic, este ntr-o
msur nsemnat influenat de distana
surstraductor, precum i de caracteristicile
mediului ambiant, necesitnd n acelai timp
condiiile cmpului acustic liber, sau
135
Rezult c determinarea puterii acustice prin msurarea intensitii acustice are
urmtoarele avantaje:
msurtorile pot fi efectuate n orice camer;
msurtorile pot fi efectuate n cmp acustic apropiat sau deprtat, cele n cmp
apropiat necesitnd un numr mai mare de puncte de msur;
forma suprafeei pe care se fac msurtorile poate fi oarecare;
este exclus influena altor surse de zgomot.
4.3.3. Identificarea surselor acustice
Localizarea surselor acustice sau a zonelor de absorbie acustic n sistemele
mecanice se poate realiza prin urmtoarele metode:
metoda comparaiei, care const n deplasarea sondei n poziie perpendicular
fa de suprafaa de explorare, deasupra suprafeei i n apropiere de ea; prezena
unei surse acustice semnificative n zona controlat conduce la modificri de spectru,
care se pot memora pentru comparaie i control ulterior (fig. 4.12.a);
Fig. 4.12.
metoda deplasrii continue, la care sonda se aeaz paralel cu suprafaa
controlat; trecerea unei surse acustice prin zona cu sensibilitate minim a sondei,
determin schimbarea de semn n reprezentarea unor zone anumite din spectru,
evideniind sursa de zgomot (fig. 4.12.b).
metoda trasrii unor cmpuri de egal intensitate, const n deplasarea unei
sonde deasupra unei suprafee date, n poziii date i determinarea mrimii
componentei normale a vectorului intensitate acustic; spectrele obinute sunt
memorate i apoi trasate pe contururi cu egal intensitate sau n trei dimensiuni,
pentru fiecare band sau domeniu de frecven studiat, ntr-un sistem de coordonate
care corespunde reelei poziiilor de msur.
Plasarea sondei printr-un suport special pentru fiecare punct de msur al
reelei, pe trei direcii, d posibilitatea determinrii vectorului intensitate acustic
(mrime i orientare ). Cmpurile de egal intensitate se traseaz cu culori diferite,
dup cum vectorul intensitate capt semnul + sau - , sau n sistem 3D.
Intensitatea acustic se consider pozitiv dac fluxul energetic se propag de
la suprafaa sursei ctre mediul exterior. Intensitatea negativ indic un flux energetic
de la mediul exterior ctre suprafa.
136
Stabilirea reelelor de msurare se face n aa fel nct s asigure fidelitatea
necesar (ct mai multe puncte de msurare) i de asemenea cerine economice de
timp (ct mai puine puncte de msurare).
n cazul utilizrii unor condiii de camer semianecoid i pe suprafa de
msurare semisferic, calculul puterii acustice se face cu relaia:
L
PI
=L
Ii
+10lgS+C
unde L
PI
= nivelul de intensitate acustic ( nivelul de referin 1pW/m
2
) msurat n n
puncte pe suprafaa S, n m
2
; C = corecia de temperatur i presiune cnd acestea
nregistreaz variaii importante fa de condiiile standard.
Suma L
Ii
se calculeaz cu relaia:
=
=
N
1 i
L 1 , 0
Ii
Ii
10
N
1
lg 10 L
pentru fiecare 1/3 band de octav.
4.4. Controlul prin emisie acustic
4.4.1. Introducere
Emisia acustic se manifest ndeosebi n domeniul frecvenelor nalte (>100 kHz),
prin unde elastice, detectabile ca vibraii, pe suprafaa componentelor de maini sau a
structurilor mecanice.
Emisia acustic poate fi generat de:
dislocri structurale, n domeniul deformaiilor elastice macroscopice;
transformri de faz n aliaje (formarea martensitei n oel);
realinierea, reorientarea sau creterea domeniilor magnetice;
fisurile, n apariia i creterea lor, ca rezultat al solicitrilor statice sau de
oboseal, cu evoluie ctre rupere;
microfrecrile la nivelul suprafeelor fisurilor sau ntre alte suprafee, fr
deplasri relative macroscopice;
degajrile de gaze n timpul coroziunii;
microciocnirile cu i ntre particule microscopice, libere;
scurgerea turbulent de fluid prin interstiii;
microdescrcrile sau microstrpungerile n componentele electrice sau
electronice;
Controlul prin emisie acustic prezint urmtoarele avantaje:
- posibilitatea de a realiza un control cu sensibilitate ridicat pe ntreg volumul
elementului sau structurii mecanice;
- posibilitatea de a localiza defectul n timp i spaiu i de a evidenia evoluia
defectului, fr ca rezultatele s fie influenate de orientarea defectului sau de
mrimea structurii;
- lanul de msur este relativ simplu, cu montaj rapid.
137
Dezavantajele metodei sunt:
- interferena posibil cu zgomotul de fond sau cu alte vibraii n acelai
domeniu de frecven, deci defectul nu este suficient definit;
- structurile controlate trebuie s se gseasc n stare de tensionare;
- rezultatele depind de particularitile constructive, de material i de defectele
de cuplare ale elementelor structurii;
-dificultile de realizare a aparaturii de procesare a semnalelor de emisie
acustic;
Aplicaiile obinuite au fost realizate n industria chimic i energetic
nuclear, maini unelte, aeronautic, construcii metalice, astfel:
-controlul n fabricaia i monitorizarea tehnologic pentru sudare, prelucrri
prin achiere, montaj etc.;
-controlul i ncercarea final de fabricaie: rezervoare i conducte, construcii
metalice, mbinri etc.;
-controlul i ncercrile pe parcursul exploatrii: rezervoare i conducte,
construcii i poduri metalice, maini rotative etc.;
-monitorizarea n exploatare: rezervoare i conducte, construcii i poduri
metalice, structuri metalice la nave aerospaiale etc.
a)
b)
Fig.4.12
4.4.2. Aparatura pentru controlul i diagnosticarea prin EA
Aparatura de msur i analiz prin EA, trebuie s poat separa semnalul de
E.A. de zgomotul de fond sau de alte semnale neimportante, prin filtrarea n
frecven, amplitudine sau timp. n fig. 4.13 este prezentat un lan de msur B&K.
Traductoarele folosite n tehnicile de detecie ultrasonor nu sunt recomandate
pentru captarea EA, datorit suprafeei mari de contact n raport cu lungimea de und
a vibraiei. Rezult deci necesitatea realizrii contactului pe suprafee ct mai reduse
(n pictur de ulei sau adeziv).
Etalonarea traductoarelor de EA se poate realiza prin metoda reciprocitii, prin
sfrmarea de gruni de nisip, metoda excitaiei prin oc sau scnteie, prin ruperea
pe suprafaa structurii sau a elementului studiat a unei mine de creion 2H cu
diametrul o,5, introdus ntr-un suport.
Analiza semnalului de emisie acustic arat o evoluie n
timp, fie cu amplitudine relativ constant (fig.4.12.a), fie de
timp impuls, n domeniul de frecven 100khz1Mhz
(fig.4.12.b). Creterea amplitudinii este determinat de:
mrimea tensiunilor mecanice, deformaia specific,
dimensiunile grunilor structurali, anizotropia i
neomogenitatea materialului, precum i de temperatura
joas;
emisia acustic declanat de micrile de dislocare este
de tip continuu, cu amplitudini reduse, spre deosebire de
sursa de tip transformri de faz sau fisuri, cu emisie de
tip impuls cu amplitudini mai mari.
138
Fig. 4.13
Preamplificatorul are rolul de adapta impedanele i de a transfera semnalul, cu
un zgomot de fond minim, n cazurile n care ntre traductor i aparatura de msur
este distan mare (de ordinul zecilor de metri).
Filtrul inclus n preamplificator are rolul de a elimina din semnalul de EA,
influena zgomotelor de natur mecanic, cum ar fi: ocurile mici sau frecrile.
Msurarea se poate realiza prin utilizarea voltmetrului cu mediere n timp sau
folosind osciloscopul cu sau fr memorie.
Pentru analiza semnalului n domeniul timp sau frecven dispozitivele de
analiz vor corespunde frecvenelor mari care se analizeaz.
4.4.3. Metode specifice de analiza a EA
a) Metoda numrrii impulsurilor. Pentru analiza EA prin aceast metod se
folosete n cadrul lanului de msurare, un dispozitiv de discriminare a nivelului de
amplitudine a impulsurilor, urmat de un numrtor de impulsuri n total sau pe
unitatea de timp (rata impulsurilor). Aceast metod se recomand n cazul
semnalelor de tip impuls.
b) Metoda de analiz n domeniul frecven furnizeaz informaii referitoare la
caracteristicile i modificrile sursei i traiectoriei undei. nregistrrile digitale n
domeniul 10kHz 1MHz, specifice emisiei acustice, pot fi aduse prin transformri de
frecven n domeniul audio, n care lucreaz majoritatea aparatelor de analiz.
4.4.4. EA i deformaia plastic
n cazul ncercrilor la traciune a epruvetelor netede n domeniul sarcinilor
corespunztoare limitei de curgere se constat o emisie acustic puternic dup care
activitatea de EA scade cu realizarea saturaiei de deformaie plastic, pentru a fi
reluat puternic odat cu evoluia spre rupere i odat cu apariia fisurii de rupere.
n fig. 4.14 sunt prezentate curbele caracteristice i emisia acustic la
dou tipuri de deformaii plastice. Pentru alte materiale emisia acustic este continu
i crete continuu odat cu creterea sarcinii (fig.4.15).
ncercrile experimentale au artat c ncrcarea structurii sub o anumit
sarcin, cu declanarea emisiei acustice, urmat de descrcarea structurii i de o nou
139
Fig. 4.14
Fig. 4.15
Fig. 4.16
140
ncrcare, este nsoit de o noua emisie acustic numai dac s-a depit nivelul iniial
de ncrcare, fenomen cunoscut sub numele de efectul Kaiser (fig. 4.16).
Acest efect st la baza tehnicilor de control pentru structurile puternic solicitate
cu pretenii de fiabilitate ridicat.
4.4.5. EA i ruperea materialelor
Ruperea prin fisuri a elementelor sau structurilor solicitate poate fi prevzut
prin emisie acustic, metoda oferind posibilitatea interveniei, naintea ruperii sau
apariia defectelor de mari proporii.
Fig. 4.17
Se poate constata c dislocrile de gruni evolueaz spre microfisuri, fisuri i
rupere ntr-un interval de timp suficient de mare pentru a permite depistarea.
Propagarea fisurilor prin oboseal, i implicit a emisiei acustice care o nsoete
ctre rupere, are la baz urmtoarele mecanisme: deformaii plastice n vrful zonei
plastice de rupere, microfracturile din zona deformaiilor plastice puternice sau n
vrful fisurii, atingerile suprafeelor n fisur.
Primul mecanism este dominant, cel de-al doilea se dezvolt la sarcinile
maxime ale ciclurilor de solicitare, n timp ce ultimul se observ n evoluia trzie a
fisurii.
4.4.6. Controlul tehnologic prin EA
Controlul tehnologic prin EA d indicaii asupra transformrilor de faz n
aliaje, asupra calitii componentelor realizate prin sudare, lipire cu adezivi, placare,
acoperire prin pulverizare, prelucrare prin deformare plastic.
La mbinrile sudate, zonele afectate termic se caracterizeaz prin gradieni de
temperatur cu valori ridicate, care pot conduce la fisuri, deformaii plastice, ca surse
de EA. n aceeai msur, pot constitui surse de EA i defectele de sudare:
incluziunile, porozitile, fisurile la cald sau la rece n timpul execuiei etc.
Dac unei fisuri deja declanate i se aplic
o solicitare extern, rezult o zon de deformaii
plastice importante. Dinamica procesului de
apariie a fisurilor este caracterizat de
aglomerri intense, deplasarea zonelor de
dislocare sau chiar ruperea grunilor de material
n zona de formare a fisurii. n cazul materialelor
metalice supuse la solicitri variabile i rupere
prin oboseal, emisia acustic apare mult nainte
de apariia fisurii de rupere, fiind datorat unei
intense activiti de tensionare deformare la
nivelul grunilor metalici (fig. 4.17).
141
Rezultate asemntoare au fost evideniate i la controlul prin EA al
mbinrilor sudate cu jet de electroni sau prin rezisten electric, n cazul mbinrilor
prin lipire cu adezivi, la prelucrarea prin deformare plastic etc.
4.4.7. Controlul prin EA al sistemelor mecanice
Controlul prin EA poate fi aplicat i organelor de maini i structurilor
mecanice n funciune n scopul depistrii apariiei unor fisuri de rupere static sau de
oboseal, al desprinderilor, al verificrii etanietii etc. Poziia sursei se poate stabili
pe baza unor ncercri prealabile sau prin calcule de orientare. Au fost realizate
ncercri experimentale de diagnosticare prin EA pentru cabluri, scule achietoare,
rulmeni, etanietatea supapelor la instalaiile cu abur, detecia defectelor la
componentele electrice sau a microdescrcrilor n condesatorii circuitelor integrate,
controlul componentelor i structurilor din materiale compozite, controlul
recipienilor i instalaiilor sub presiune etc.
4.5. Controlul surselor sonore prin funcia de coeren
4.5.1. Introducere
Procesul de control acustic implic identificarea surselor sonore precum i
determinarea caracteristicilor acestora.
Funcia de coeren permite determinarea contribuiei cantitative a surselor
sonore la semnalul global, n orice band de frecven.
Pentru identificarea surselor sonore, trebuie realizat analiza prin funcia de
coeren la nivelul spectrelor de putere, prin multiplicarea n domeniul frecven a
spectrului funciei de rspuns n putere, pentru o poziie oarecare, cu funcia de
coeren ntre semnalul acestei poziii i o alt poziie de referin.
n cazul n care semnalul global este generat prin aciunea mai multor surse de
semnal reciproc necoerente, atunci puterea coerent rezultant ne d contribuia
fiecrei surse la realizarea semnalului global.
Cercetrile teoretice i experimentale realizate n scopul identificrii surselor
acustice prin intermediul funciei de coeren s-au dezvoltat foarte mult n ultimele
decenii, fr s reueasc s elimine toate ambiguitile.
Dificultatea major a folosirii acestei metode n acustic const n faptul c,
sistemele acustice investigate sunt caracterizate mai mult de parametri distribuii i
mai puin de parametri localizai. De asemenea, un alt dezavantaj const n faptul c,
deseori, semnalele nu sunt pur aleatoare.
Dificultile practice ntmpinate n procesul de control sunt legate de:
coerena semnalelor;
probleme n obinerea semnalelor reprezentative ale sursei;
condiii de reverberaie.
n continuare sunt prezentate o serie de rezultate legate de erorile care apar n
procesul de identificare a surselor acustice cu ajutorul funciei de coeren.
142
4.5.2. Consideraii teoretice
Determinarea funciei de coeren se bazeaz pe teoria sistemului liniar. S
considerm un sistem liniar, definit n domeniul frecvenelor prin funcia de rspuns
H(), iar n domeniul timpului prin funcia de rspuns la impulsul unitate h(t).
Dac se noteaz cu x(t) semnalul de intrare care constituie excitaia sistemului,
atunci rspunsul sistemului va fi un semnal y(t), care se poate exprima prin integrala
lui Duhamel cu relaia (fig. 4.18):
Fig. 4.18
la ieirea din sistemul liniar, pe baza mrimilor cunoscute ale excitaiei:
+ =
2 / T
2 / T
T
xy
dt ) t ( y ) t ( x
T
1
lim ) ( R
) ( S ) ( H d e ) ( R
2
1
) ( S
xx
2
i
yy yy
=
=
) ( S ) ( H d e ) ( R
2
1
) ( S
xx
i
xy xy
=
=
cu:
=
d e ) ( R
2
1
) ( S
i
xx xx
i
+ =
2 / T
2 / T
T
xx
dt ) t ( x ) t ( x
T
1
lim ) ( R
unde R
yy
(), S
yy
(), S
xy
(), sunt: funcia de autocorelaie a semnalului y(t),
densitatea spectral a mediei ptratice i densitatea interspectral ntre excitaia x(t) i
rspunsul y(t); R
xx
(), i S
xx
(), sunt funcia de autocorelaie a semnalului x(t) i
densitatea spectral de putere.
Funcia de coeren dintre x(t) i y(t) este definit de relaia:
1
) ( S ) ( S
) i ( S
) (
yy xx
2
xy
2
xy
=
Semnalele x(t) i y(t) pot fi msurate direct, astfel nct se poate calcula uor
) (
2
xy
. n majoritatea cazurilor x(t) este semnal acustic sau vibraie, iar y(t) este
semnal acustic.
Prin calcularea funciei de coeren, se poate determina contribuia cantitativ a
semnalului de intrare x(t), la determinarea nivelului semnalului de ieire y(t).
De asemenea, se poate calcula densitatea spectral coerent cu relaia:
) ( S ) ( S
yy
2
xy
'
yy
=
x(t) y(t)
Sistem
liniar
=
t
d ) t ( h ) ( x ) t ( y
Prin aplicarea transformatei Fourier se pot
determina mrimile i funciile corespunztoare,
143
4.5.3. Cercetri experimentale
Pentru a stabili posibilitile oferite de analiza prin funcia de coeren, la
identificarea i caracterizarea surselor sonore au fost realizate cercetri experimentale
n camer anecoid. ntruct n camera anecoid nu exist cmp acustic reflectat, se
poate realiza calculul exact al densitii spectrale coerente.
Scopul experimentelor a fost acela de a dovedi justeea metodei coerenei
pentru identificarea surselor sonore.
n fig.4.19 este dat panoul diagram a instrumentului virtual pentru calculul
funciei de coeren iar n fig. 4.20 este prezentat lanul de msur pentru
determinarea funciei de coerent.
Fig.4.19
Difuzorul (I) produce zgomotul de fond n camera anecoid, iar difuzorul (II)
genereaz un semnal sonor x(t) msurat cu microfonul A. Semnalul rezultant y(t) se
msoar ntr-un alt punct B cu cel de-al doilea microfon.
Iniial s-au msurat semnalele x(t) i y(t) n prezena zgomotului de fond creat
de difuzorul (I) calculndu-se funcia de coeren.
A
B
Fig. 4.20
n figura 4.20 am notat: 1-generator de semnal; 2-amplificator de putere; I,II-
difuzoare; A,B-microfoane; 3-preamplificator; 4-convertor analog-digital; 5-
calculator; 6-imprimant.
Dac nivelul zgomotului de fond este acelai cu nivelul semnalului x(t), atunci
funcia de coeren tinde spre zero, pentru frecvene mai mari de 1,5 kHz (fig. 4.21).
n cazul n care nivelul zgomotului de fond este mai mic cu 10 dB fa de
nivelul semnalului x(t), atunci funcia de coeren are valori mai mari de 0,6
1
1
2
2
I
II
3 4 5 6
144
(fig.4.22). Cercetrile au fost realizate i ntr-o camer reverberant, prin aezarea
microfoanelor A i B la aceeai nlime i distan de sursa sonor.
Dac cele dou microfoane sunt aezate alturi (unghiul dintre microfoane
fiind egal cu 0 grade), funcia de coeren capt valoarea 1 i descrete substanial
la frecvene mari, atunci cnd unghiul este mai mare de 30 grade. Acest proces are
loc datorit fenomenului de interferen dintre unda direct i unda reflectat.
Pentru microfoanele amplasate la aceeai nlime fa de sursa sonor, dar
aezate vis--vis unul fa de altul ( = 180 grade), coerena este neglijabil pentru
toate frecvenele peste 500 Hz.
Fig.4.21 Fig.4.22
Rezult c la frecvene nalte, apar erori considerabile la identificarea surselor
sonore cu ajutorul funciei de coeren, datorit fenomenului de interferen a
semnalelor. Dac microfoanele sunt amplasate de-a lungul unei linii comune de la
sursa central de zgomot, dar situate la distane diferite fa de aceasta, funcia de
coeren msurat arat pierderea considerabil a coerenei, pentru frecvene mai
mari de 1 kHz.
n concluzie, funcia de coeren permite identificarea surselor sonore, precum
i determinarea contribuiei cantitative a acestora la realizarea cmpului acustic
rezultant ntr-un punct din cmpul sonor.
Aceast metod prezint dou avantaje principale:
a) nu este necesar schimbarea condiiilor ambientale pe parcursul desfurrii
cercetrilor experimentale;
b) poate fi folosit pentru a studia influena diverilor factori asupra surselor de
zgomot.
Factorul care restrnge domeniul de aplicabilitate a metodei coerenei la
identificarea surselor de zgomot din structura mainilor i utilajelor este, n special,
coerena surselor.
Pentru a mri precizia de identificare a surselor, trebuie ca ntre sursele sonore,
coerena s fie mai mic de 0,6, iar nivelul zgomotului de fond trebuie s fie mai mic
cu cel puin 10 dB fa de nivelul de zgomot al surselor sonore analizate.
145
5
CONTROLUL ACTIV AL VIBRAIILOR I
ZGOMOTULUI
5.1.Consideraii generale
Performanele dinamice ale sistemelor mecanice, n timpul funcionrii, pot fi
mbuntite prin alegerea adecvat a regimurilor de lucru, prin adoptarea unei
construcii optime, din punct de vedere al rezervei de stabilitate, sau prin aplicarea
unor msuri constructive sau de control activ.
Dezvoltarea tehnicii de msurare i analiz a vibraiilor, ca i dezvoltarea
tehnicilor de achiziie i procesare a semnalelor au permis importante perfecionri
ale sistemelor de control activ al vibraiilor. Realizarea sistemelor pentru controlul
activ al vibraiilor implic msurtori n situ realizate cu senzori/actuatori i
controlori, rezultnd sisteme cu multiple intrri i multiple ieiri (MIMO).
Studiile recente realizate asupra sistemelor MIMO au urmrit fiabilitatea
controlului sistemelor mecanice, cerine de procesare i precizia necesar
determinrii caracteristicilor structurale ale sistemului controlat.
Cercetrile experimentale efectuate au urmrit adugarea unor amortizri
active n sistem, n scopul obinerii unui control al comenzii sau a unui rspuns
automat, drept rspuns la aciunile externe. Controlul structurilor vibrante este studiat
n paralel cu dinamica poziionrii senzorilor i actuatorilor n locul micrilor
maxime, precum i plasarea actuatorilor n scopul anulrii micrii vibratorii a
structurii. n ultimii ani, se manifest o tendin de cretere a calitii i fiabilitii
sistemelor mecatronice, prin utilizarea unor sisteme senzoriale complexe care au
funcii de monitorizare, diagnostic i control activ. Realizarea unui sistem senzorial
inteligent, cuplat cu tehnici avansate de prelucrare a semnalelor, permite realizarea
unor sisteme performante de control activ al vibraiilor ceea ce nu garanteaz implicit
i o eficien deosebit n exploatare. Aceast eficien depinde i de fiabilitatea
interfeei cu maina sau de erorile de operare cu sistemul senzorial.
Din analiza sistemelor senzoriale implementate industrial n S.U.A. i Japonia
s-a desprins concluzia important c funcionarea fr defectri a sistemelor de
control activ necesit ca n viitor sistemele senzoriale inteligente trebuie s aib
ncorporate i funcii de autodiagnostic.
Implementarea cu succes a sistemelor de control activ al vibraiilor depinde de
realizarea unui model teoretic, realizat pe baza teoriei sistemelor, care s defineasc
dependena ieirilor traductorilor de vibraii de caracteristicile dinamice ale structurii,
astfel nct s se poat face o predicie a comportrii dinamice a sistemului.
Pe piaa mondial exist mai multe echipamente de control activ a vibraiilor n
timpul procesului de funcionare, care sunt alctuite din microcalculatoare, asociate
146
cu dispozitive de msur, care includ dispozitive de condiionare a semnalului de
vibraii i care l aduc n limite standard.
Optimizarea procesului de control activ al vibraiilor este o extensie logic a
supravegherii i diagnozei multisenzoriale. Dac semnalele de ieire ale traductorilor
pot caracteriza comportarea la vibraii a structurii, atunci se poate realiza o strategie
de comand n timp real pentru ndeplinirea unei funcii obiectiv.
Pentru a putea realiza acest lucru este necesar o nelegere senzorial, termen
prin care definim abilitatea sistemului de a combina informaiile mai multor
traductori pentru a lua o decizie de comand a procesului. Un sistem de control activ
se bazeaz pe realizarea unor algoritmi care s integreze informaiile de la mai muli
traductori inteligeni, termeni prin care definim o colecie de traductori de vibraii,
tehnici de procesare a semnalului i de calcul al unor caracteristici.
Sistemele de control activ al vibraiilor realizeaz o adaptare a programului de
comand, pentru ndeplinirea unui criteriu de optimizare.
n implementarea strategiilor de control activ optimal se folosesc, pe scar din
ce n ce mai larg, tehnici avansate de inteligen artificial, tehnica reelelor
neuronale, logica fuzzy sau algoritmi genetici pentru integrarea senzorial, extragerea
de caracteristici din semnalele acestora i luarea deciziilor. Dificultile controlului
activ al vibraiilor sunt legate de prezena zgomotului n datele de msur de la
senzori, care poate determina o oarecare instabilitate a procesului de control.
Succesul strategiei de control este limitat dac informaiile de intrare nu sunt
destul de bogate. n ultimile decenii a fost propus un numr mare de metode i tehnici
de proiectare a sistemelor de control activ al vibraiilor, avndu-se n vedere, n
special, proprietile de rejecie a perturbaiilor i n anumite cazuri stabilitatea
structural a sistemului, pe baza teoriei sistemelor.
Odat cu dezvoltarea noilor concepte n teoria modern a sistemelor i a
tehnicii de calcul, acestea au devenit instrumente la ndemna multor proiectani.
Teoriile uzuale de proiectare a sistemelor adaptive, pentru controlul activ al
vibraiilor se bazeaz pe urmtoarele ipoteze:
sistemul poate fi modelat i structura sa este cunoscut;
parametrii modelului sunt cunoscui.
n realitate, modelul utilizat nu reprezint, de regul, dect o aproximare a
sistemului fizic, valabil ntr-un domeniu restrns de funcionare, n care se
neglijeaz, n scopul simplificrii, efectul intrrilor secundare. Parametrii care
intervin trebuie, adesea, determinai experimental i de obicei se presupun constani.
Obinerea unor performane acceptabile ale sistemului adaptiv este determinat
de numeroase dificulti, datorit prezenei unor perturbaii care produc variaia
comportrii vibratorii. Teoria modern a sistemelor liniare constante nu poate fi
utilizat la proiectarea sistemelor adaptive, pentru controlul activ al vibraiilor, din
urmtoarele motive:
parametrii procesului vibratoriu nu pot fi cunoscui integral;
sistemele mecanice au n general o comportare neliniar;
caracteristicile de transfer variaz n timp;
acioneaz perturbaii aleatoare.
147
Dintre numeroasele tehnici propuse pentru controlul activ al vibraiilor, n
ultimile dou decenii s-a remarcat tehnica cu regulatoare autoacordabile, la care se
realizeaz identificarea on-line a parametrilor procesului vibratoriu i, pe baza
estimrilor obinute, se actualizeaz coeficienii unei legi de reglare cu structur
fixat. n cadrul acestei abordri exist un spectru larg de algoritmi de control activ
al vibraiilor obinui prin combinarea mai multor modele, algoritmi de identificare i
metode de proiectare a legii de comand.
n concepia actual a teoriei sistemelor, rezolvarea problemelor de control
activ al vibraiilor presupune parcurgerea ctorva etape importante.
1. Prima etap const n construcia modelului matematic al sistemului fizic,
capabil s descrie satisfctor comportarea dinamic a sistemului.
2. A doua etap const n elaborarea sistemului de comand, care s asigure
controlul activ al vibraiilor.
3. n ultima etap are loc implementarea sistemului de comand.
Tehnicile de comand adaptiv autoacordabil au fost elaborate n scopul
eliminrii unor dificulti care apar la controlul activ al vibraiilor sistemelor
mecanice, a cror comportare dinamic este cunoscut parial i care funcioneaz n
condiii variabile. Sistemele adaptive autoacordabile funcioneaz n bucl nchis i
utilizeaz o schem de estimare remisiv a parametrilor procesului vibrator, iar
valorile estimaiilor sunt folosite ntr-o procedur de proiectare on-line a unui
regulator de structur dat. Utilizarea sistemelor adaptive pentru controlul activ al
vibraiilor este recomandabil att pentru simplitatea posibil a schemei de comand,
ct i pentru eficiena procesului de comand.
Datorit dinamicii nemodelate, algoritmii de comand teoretic convergeni pot
deveni instabili. n acest sens este necesar dezvoltarea de cercetri pentru gsirea de
soluii pentru asigurarea robusteii sistemului, ceea ce implic i o complicare a
strategiei de comand. Utilizarea unui sistem adaptiv pentru controlul activ al
vibraiilor, necesit cunoaterea prealabil a dinamicii acestuia, sau specificarea unor
parametri de adaptare. O acordare corect a acestora implic specificarea de ctre
proiectant a unor parametri care apar n cadrul algoritmilor de estimare.
Alegerea corect a acestuia necesit cunoaterea dinamicii procesului vibrator
i a principiilor de proiectare a regulatoarelor autoreglabile. De asemenea, se impune
luarea unor msuri de siguran pentru evitarea unor fenomene nedorite ce pot s
apar n timpul funcionrii de durat a regulatoarelor adaptive.
Implementarea sistemelor adaptive implic autoadaptarea regulatorului ntr-un
timp care este funcie de ieirea sistemului i de semnalele de perturbaie, ceea ce
poate genera comenzi necorespunztoare care pot periclita sigurana sistemului
mecanic. Pentru a mri sigurana n funcionare a sistemului mecanic n perioada de
adaptare, se poate realiza o simulare numeric a regulatorului, n felul acesta
realiznd i o trecere rapid de la perioada de concepie la cea de implementare.
Simularea numeric se bazeaz, de obicei, pe o aproximare redus a dinamicii
sistemului mecanic, dar care, poate fi suficient, uneori, pentru luarea unor msuri
care s asigure un regim tranzitoriu de acordare de scurt durat, rmnnd ca n
momentul implementrii s se realizeze numai o acordare fin a regulatorului.
148
Noile echipamente de calcul, n timp real, au permis implementarea la scar
industrial a sistemelor adaptive, fiind aplicate eficient la automatizarea unor procese
industriale moderne, n domeniul piloilor automai, la sistemele militare, maini
unelte, roboi industriali etc. Identificarea sistemelor mecanice constituie o etap
obligatorie n proiectarea sistemelor moderne adaptive, ceea ce implic o cunoatere
suficient de precis a modelelor sistemice asociate proceselor vibratorii din sistemele
mecanice.
Identificarea analitic cere un efort de proiectare mare, modelele obinute fiind
complexe, neadecvate din punct de vedere sistemic i nu permite includerea efectelor
produse de aciunile perturbatoare aleatoare.
Concepia modern a proiectrii sistemelor adaptive este actualmente integrat
cu concepia sistemic i cu teoria identificrii experimentale a proceselor vibratorii,
necesitnd calculatoare performante, ntruct impune utilizarea unor algoritmi de
identificare i reglare sofisticai, dar eficieni.
Sistemele adaptive necesit msurarea mrimilor procesuale i prelucrarea n
timp real a datelor msurate, precum i stabilirea unui model dinamic minimal, care
s nglobeze efectul sistemic al tuturor perturbaiilor remarcabile, interne sau externe
procesului vibrator.
Identificarea unui proces vibrator necesit, n principiu, urmtoarele etape:
a) Determinarea unei clase de modele adecvat proiectrii algoritmilor de
reglare necesit n prealabil, o identificare analitic grosier, bazat pe cercetri
teoretice. Stabilirea modelului optim, din aceast clas, se face ulterior prin tehnicile
de identificare sistemic, care necesit o identificare sistemic, o reglare adaptiv i
care impune alegerea unei clase de algoritmi de reglaj adecvai.
Disponibilitile hard-software ale calculatorului de proces introduc restricii n
alegerea clasei algoritmilor de reglare care se determin pe baza unei ipoteze iniiale
fcut asupra modelului sistemic. Nu orice comand sistemic n procesul vibrator
este admisibil tehnic sau tehnologic i invers, nu orice intrare admis tehnic sau
tehnologic este optim.
b) Achiziia datelor de intrare/ieire i alegerea tipului de semnal de comand
implic existena n prealabil a traductoarelor de proces i a elementelor de execuie
adecvate. Pe lng semnalele de intrare, unele metode de identificare activ necesit
semnale de intrare tipice, introduse artificial i care, prin coninutul predefinit, permit
determinarea modelelor dorite. Majoritatea sistemelor adaptive utilizeaz algoritmi de
identificare on-line n bucl nchis.
c) Determinarea parametrilor modelului optim se face avnd la baz dou
principii teoretice: optimizarea parametric sau teoria estimaiei. n proiectarea
sistemelor automate adaptive este preferat teoria estimaiei n cazul proceselor
vibratorii afectate de perturbaii stohastice i de complexitate mare.
Noile echipamente mecatronice necesit folosirea unor sisteme adaptive
performante, pentru controlul activ al vibraiilor. Nevoia de optimizare a controlului
activ al vibraiilor va fi mai pregnant n domeniul sistemelor expert i a roboilor
inteligeni. Performanele sistemelor de control activ al vibraiilor depind i de modul
cum se face interfaarea la nivelul de hardware ct i la nivelul de control i software.
149
Realizarea unui sistem de control activ al vibraiilor implic:
un complex de senzori;
analiza i interpretarea semnalelor date de senzori;
stocarea energiei, conversia n lucru mecanic i controlul ntr-un ciclu de
funcionare;
tehnici de acionare precise care primesc semnalele de la senzori i menin
sistemul mecanic n funciune.
5.2. Sisteme de control al vibraiilor
5.2.1. Consideraii generale
Progresele recente n domeniul electronicii, informaticii i a sistemelor de
control a fcut posibil abordarea problemelor de vibraii ale sistemelor mecanice
ntr-o manier nou mult mai eficient.
n timp ce modalitatea tradiional de reducere a vibraiilor const n mrirea
rigiditii sistemelor mecanice sau utilizarea amortizrii, n prezent sistemele de
control sunt capabile s modifice rspunsul sistemului mecanic la solicitrile
dinamice, prin aplicarea adecvat a unor fore active, realiznd o reducere a
vibraiilor. Aceast soluie este utilizat n toate domeniile mecanicii structurilor, cu
aplicaii n construcii, inginerie mecanic i aeronautic.
De exemplu, n cazul unei structuri uoare de dimensiuni mari, proiectat
pentru a fi lansat n spaiu cu gravitaie redus, forele statice sunt reduse sau chiar
nule, ceea ce permite proiectarea unei structuri foarte uoare, aceasta fiind chiar una
din condiiile de baz impuse pentru orice structur ce urmeaz a fi plasat pe orbit.
Aceasta conduce la o frecven proprie de valoare foarte redus care poate fi
excitat cu uurin i pentru care amortizarea este redus.
Orice ncercare de a menine forele active i deplasarea n limitele rezonabile,
cu tehnici convenionale (spre exemplu prin rigidizarea structurii i adugarea
amortizrii) poate conduce la o cretere semnificativ a masei i deci a costului
construciei. Utilizarea unui sistem de control activ conduce la rezolvarea acestei
probleme ntr-o manier mult mai eficient i mai ieftin.
Un sistem mecanic prevzut cu actuatori, care i poate adapta forma
geometric sau i poate modifica caracteristicile mecanice, pentru a stabiliza un
numr de parametri de lucru, se numete sistem adaptiv. Deci un sistem adaptiv are
actuatori care permit modificarea controlat a strii i caracteristicilor sistemului.
150
O alt categorie de sisteme mecanice sunt acelea n care sunt prezeni i
senzorii. Nu este obligatoriu ca cele dou elemente (actuatorii i senzorii) s apar
mpreun ntr-un sistem. Un sistem care este att adaptiv ct i senzorial se numete
sistem controlat.
Sistemele active sunt sisteme controlate, n care este prezent i o surs
extern de energie, utilizat pentru controlul sistemului mecanic i modelat de
sistemul de control cu ajutorul informaiilor venite de la senzori.
Sistemele inteligente pot fi difereniate de sistemele active prin prezena ntr-o
mai mare msur a sistemului de control, care preia mai multe funcii.
Cele mai multe sisteme biologice intr n aceast categorie, iar un exemplu de
sistem inteligent este aripa unei psri care-i modific parametrii aerodinamici,
pentru a controla forele aerodinamice necesare zborului. n acest caz este controlat
att forma aripii ct i comportamentul dinamic al acesteia. n timp ce sistemul
central de control coordoneaz ntregul sistem, cele mai multe aciuni de control sunt
exercitate de subsistemele periferice distribuite n toat structura.
n toate tipurile de structuri controlate, sistemul de control trebuie s execute
o gam larg de sarcini. Acesta poate fi utilizat pentru a modifica unii parametri
critici n scopul de a adapta caracteristicile sistemului la condiiile de lucru.
Un exemplu de sistem de control este i un dispozitiv ce modific rigiditatea
lagrelor unui rotor, cu scopul de a varia turaia critic a acestuia n timpul pornirii,
pentru a permite trecerea din zona subcritic n cea supracritic, fr a trece prin
turaia critic. n acest caz nu este necesar un sistem de control foarte complicat i
poate fi utilizat chiar un control manual n cazul n care avem de a face cu o pornire
lent. Un alt exemplu n care pot fi utilizate sistemele lente de control sunt suspensiile
autovehiculelor, capabile s menin vehiculul ntr-o poziie prescris chiar i atunci
cnd apar fore statice sau cvasi-statice (cum ar fi forele centrifugale n curbele cilor
de rulare). n cazul n care sistemul de control trebuie s furnizeze fore pentru a
controla vibraiile, rspunsul acestuia trebuie s fie rapid.
Atunci cnd este suficient controlul ctorva moduri proprii ale structurii
mecanice (cum ar fi n cazul cldirilor nalte, a podurilor i a unor structuri spaiale)
cerinele pentru sistemului de control nu sunt foarte severe, acestea devenind dificile
atunci cnd perioada caracteristic a fenomenului ce trebuie inut sub control este
mic i deci frecvenele corespunztoare sunt mari.
Dac elementele structurii sunt mobile i este deja prezent un sistem de
control pentru micrile acestora, controlul comportamentului dinamic al sistemului
mecanic poate fi realizat prin coordonarea motoarelor ce acioneaz maina, cum este
151
cazul braelor de roboi sau a structurilor spaiale, n care comportamentul dinamic
este puternic afectat de modul n care actuatorii execut sarcinile lor de conducere a
elementelor structurale, n poziiile solicitate.
n viitor, aplicaiile controlului sistemelor mecanice, n particular folosind
sisteme de control activ, vor deveni din ce n ce mai accesibile.
Performanele superioare i reducerea costului sistemelor de control fac tot
mai posibil utilizarea acestora, mai ales dac sistemul de control complex, bazat pe
microprocesoare, este utilizat i n alte scopuri. Progresele recente n domeniul
reelelor neuronale deschid perspective foarte promitoare i n domeniul controlului
activ al structurilor mecanice. Sigurana n funcionare este o caracteristic impus
sistemelor de control ce realizeaz funcii vitale, cum ar fi zborul controlat de la
distan, iar aceste cerine pot avea influene puternice asupra costurilor att la nivelul
componentelor, ct i a sistemelor, n acest fel influennd negativ i aplicaiile pe
scar larg ale controlului activ.
5.2.2. Clasificarea sistemelor de control
Dezvoltarea exploziv n ultimele decenii a sistemelor de control i a
tehnologiile aferente face imposibil chiar i numai enumerarea lor n aceast lucrare
i de aceea vom prezenta, n continuare, doar cteva observaii cu privire la sistemele
de control, observaii ce ar putea fi utile la controlul vibraiilor.
Teoria clasic a controlului trateaz sistemele de control liniare sau cele care
pot fi liniarizate. Instrumentele de baz sunt aceleai cu cele ale dinamicii sistemelor
liniare: diagramele bloc, ecuaiile fazoriale, funciile de transfer i analiza cu valori
proprii pentru studiul stabilitii.
Sistemele de control pentru controlul dinamic al sistemelor mecanice pot fi
realizate utiliznd diferite tipuri de actuatori: mecanici, electrici, hidraulici sau
pneumatici. Prin urmare i tipurile de traductoare folosite pentru obinerea
informaiilor din sistem i sistemele de comand a actuatorilor sunt diverse.
n ultimul timp ns, sistemele electronice de comand au devenit mult mai
rspndite, att n cazul aplicaiilor electrice dar i n cazul aplicaiilor de
electromecanic, electrohidraulic etc. Partea electronic poate fi analogic sau
digital. Sistemele analogice sunt preferate n aplicaii simple, fiind mai ieftine dect
cele digitale. Odat cu rspndirea sistemelor bazate pe microprocesoare, sistemele
digitale au devenit tot mai folosite, n principal, datorit flexibilitii i posibilitii de
a realiza sarcini foarte complexe.
152
Sistemele de control activ sunt echipate cu surse externe de energie care
furnizeaz forele de control. Sunt cazuri n care cantitatea de energie necesar pentru
control este minim i n acest caz sistemul se numete semiactiv.
Sistemele active pot fi de asemenea manuale sau automate, dar numai cele
automate sunt importante n controlul activ al vibraiilor, mai ales dac este necesar
un control dinamic ct mai riguros.
Att sistemele de control active ct i cele pasive pot fi sisteme cu bucl
deschis sau cu bucl nchis. Sistemele de control cu bucl deschis, numite i
sisteme de control predeterminate, rspund la variaia parametrilor de intrare ai
sistemului controlat fr a msura parametrii de ieire, pentru a verifica dac
rspunsul sistemului este conform cu valorile dorite.
De exemplu, un sistem ce modific rigiditatea suporilor rotorului, n funcie
de viteza unghiular, este un sistem deschis. n sistemele cu bucl nchis, numite i
sisteme feedback, sistemul de control monitorizeaz ieirile din sistem, comparnd
valorile lor cu o serie de valori de referin predeterminate i folosete aceste
informaii pentru a controla sistemul.
Sistemele de control cu bucl deschis i cu bucl nchis pot fi folosite i
simultan, cum ar fi cazul sistemelor n care viteza de rspuns a controlerului este
mrit prin monitorizarea excitaiei i utilizarea acestei informaii pentru a ajuta la
controlul sistemului (tehnica feedforword reacie nainte).
Un exemplu de sistem de control activ, manual, cu bucl nchis este oferul
unui autovehicul. Un lagr magnetic activ este un exemplu de sistem de control activ
automat cu bucl nchis. Sistemele cu bucl nchis sunt preferate atunci cnd este
necesar un control precis, dar acest tip de sisteme de control sunt de regul mai
complexe i mai costisitoare dect sistemele cu bucl deschis. Atunci cnd controlul
este realizat prin mijloace mecanice este destul de dificil de a stabili care este
sistemul de control i care este sistemul controlat.
O alt clasificare obinuit a sistemelor de control este aceia care le mparte n
sisteme de reglare (regulatoare) i servomecanisme (sisteme de urmrire).
Un regulator este folosit pentru a menine un sistem ntr-o stare
predeterminat, care poate fi o poziie de echilibru sau o stare de micare cu o vitez
sau acceleraie impus, n condiiile existenei unor perturbaii externe. Arcul unui
pendul invers poate fi considerat un regulator, chiar dac acesta nu-i ndeplinete
sarcina n prezena unei perturbaii constante: dac o for constant F acioneaz
asupra pendulului (sistemul controlat) arcul nu este capabil s restabileasc poziia
vertical a acestuia. n cazul servomecanismelor referina se modific n timp, iar
153
sistemul de control tinde s obin la ieirea sistemului controlat o valoare care
urmrete referina. De asemenea, n acest caz ieirea poate fi o poziie, o vitez, o
acceleraie sau orice alt mrime dorit.
Sistemele de control pot fi cu o singur intrare i o singur ieire (SISO
single-input-single-output) sau cu mai multe intrri i mai multe ieiri (MIMO
multiple-input-multiple-output) numite i sisteme multivariabile. n primul caz o
singur ieire a sistemului controlat este determinat de o singur intrare a sistemului
de control. Acest caz nu este specific doar sistemelor cu un singur grad de libertate.
n cazul sistemelor cu mai multe grade de libertate controlul poate fi realizat
doar asupra unuia dintre ele, ori asupra unei combinaii de cteva variabile de stare.
De asemeni, un sistem cu un singur grad de libertate poate avea dou variabile
de stare, cum ar fi poziia i viteza, care pot fi controlate independent de un sistem de
control multivariabil. n sistemele de control multivariabile este de regul imposibil
de determinat dac o anumit intrare controleaz independent o singur ieire.
Aproape ntotdeauna apar interaciuni ntre diferite intrri i ieiri i deci
sistemul este cuplat. n cazul n care aceast interaciune nu apare i fiecare intrare
controleaz o singur ieire, sistemul poate fi divizat n mai multe sisteme SISO
(control descentralizat sau decuplat).
5.2.3. Sisteme liniare discrete controlate
n acest capitol vor fi luate n considerare doar structurile liniare controlate.
Aceasta nseamn c att sistemul controlat ct i sistemul de control trebuie
s se comporte liniar. n principiu, un sistem controlat poate fi studiat n acelai mod
ca i un sistem necontrolat.
Dac este luat n considerare abordarea n spaiul strilor, se obine un set de
ecuaii difereniale de ordinul I de acelai tip cu cele ntlnite n cazul sistemelor
necontrolate i pot fi studiate folosind aceleai procedee matematice.
Scopul principal al sistemelor de control este minimizarea rspunsului
sistemului mecanic la excitaiile exterioare acestuia, deci sistemul de control se va
comporta ca un amortizor foarte puternic.
S considerm un sistem mecanic linear cu mai multe grade de libertate, a
crei diagrama simplificat intrare-ieire este dat n fig. 5.1.a.
n fig. 5.1.b. este dat diagrama detaliat a sistemului de control realizat pe
baza ecuaiilor 5.1. Sistemul va fi asimilat cu o structur liniar, dependent de un
numr r de intrri independente )} t ( u { i care furnizeaz un numr m de ieiri
154
)} t ( y { , care pot fi diferite de cele n variabile de stare, dar care n cazul sistemelor
liniare pot fi exprimate n general ca i combinaii liniare ale variabilelor de stare.
Structura
{u(t)} {y(t)}
B C
A
{u} {y}
+
+
{z} {z}
.
a)
b)
Fig. 5.1
Recurgnd la reprezentarea prin variabile de stare, ecuaiile de micare ale
structurii pot fi scrise n forma:
+ =
+ =
)} t ( u ]{ D [ )} t ( z ]{ C [ )} t ( y {
)} t ( u ]{ B [ } z ]{ A [ } z {&
(5.1)
unde vectorul } z { conine cele n variabile de stare, ] A [ este matricea dinamic (cu n
linii i coloane) iar ] B [ este matricea de intrare (cu n linii i r coloane).
[C] este o matrice cu m linii i n coloane numit matrice de ieire.
Matricea ] D [ are m linii i r coloane i reprezint influena direct a intrrii
asupra ieirii, fiind numit i matricea de legtur direct. n continuare aceast
matrice va fi neglijat pentru a simplifica ecuaiile. Toate ecuaiile pot fi de asemenea
rescrise i cu matricea ] D [ inclus. Setul de matrici ] A [ , ] B [ , ] C [ i ] D [ alctuiesc
aa numitul cvadruplu al sistemului.
Ecuaiile (5.1) pot fi transformate n ecuaii algebrice prin transformarea
Laplace. Considernd c la momentul iniial 0 t = toate variabilele de stare erau
nule, ecuaiile sistemului n domeniul Laplace sunt:
=
+ =
)} s ( z ]{ C [ )} s ( y {
)} s ( u ]{ B [ )} s ( z ]{ A [ )} s ( z { s
(5.2)
Ecuaia ce leag ieirea sistemului de intrarea acestuia este:
)} s ( u ]{ B [ ]) A [ ] I [ s ]( C [ )} s ( y {
1
= (5.3)
iar funcia de transfer este:
] B [ ]) A [ ) I ( s ]( C [ )] s ( G [
1
= (5.4)
5.2.4. Controlabilitate i observabilitate
Spunem c un sistem este controlabil dac poate fi determinat o funcie
pentru intrrile )} t ( u { , definit n intervalul de timp de la t
o
la t
f
, care s permit
sistemului s treac din starea iniial ntr-o stare dorit, i n particular la o stare n
155
care toate variabile de stare sunt egale cu 0. Dac un sistem este controlabil pentru
orice moment iniial t
o
i pentru orice stare iniial, atunci sistemul este complet
controlabil. Pentru a verifica dac sistemul este controlabil, putem scrie matricea de
controlabilitate:
| | ] B [ ] A [ , ... ], B [ ] A [ ], B ][ A [ ], B [ ] H [
1 n 2
= (5.5)
Dac aceast matrice, cu n linii i r n coloane, are rangul n, atunci sistemul
este complet controlabil.
n mod similar, un sistem liniar este considerat observabil dac este posibil s
se determine starea acestuia la momentul t
o
din legile intrrilor )} t ( u { i cele ale
ieirilor )} t ( y { definite din momentul t
o
pn la momentul t
f
. Dac acest lucru poate
fi realizat pentru orice moment iniial t
o
i pentru orice starea iniial, atunci sistemul
este complet observabil. Pentru a verifica dac un sistem liniar cu parametri fici este
observabil, putem scrie matricea de observabilitate:
| |
T 1 n T T 2 T T T T
] C [ ) ] A ([ ..., , ] C [ ) ] A ([ , ] C [ ] A [ , ] C [ ] O [
= (5.6)
Dac aceast matrice, cu n linii i m n coloane, are rangul n, atunci
sistemul este complet observabil.
n cazul sistemelor cu o singur intrare i o singur ieire (SISO), matricele
] H [ i ] O [ sunt matrice ptratice de ordin n, i condiia rangului se reduce la o
condiie de nesingularitate. Este uor de verificat c n cazul unui sistem liniar cu un
singur grad de libertate, condiiile de observabilitate i controlabilitate sunt
ntotdeauna verificate. Acest lucru nu este ns ntotdeauna adevrat i n cazul
sistemelor cu mai multe grade de libertate, n care observabilitatea i controlabilitatea
trebuiesc verificate pentru fiecare caz particular.
5.2.5. Controlul n bucl deschis
S considerm o structur la care ata m un numr de actuatori ce acioneaz
cu o serie de fore de control } F {
c
. Ecuaia de micare a sistemului devine:
)} t ( u ]{ B [ )} t ( u ]{ B [ } z ]{ A [ } z {
c c e e
+ + = & (5.7)
unde vectorul de intrare extern } u {
e
i vectorul de intrare de control } u {
c
pot avea
dimensiuni diferite i prin urmare matricele ] B [
e
i ] B [
c
pot avea numere diferite de
coloane. Forele de control produse de actuatori sunt legate de intrrile de control
} u {
c
prin relaia } u ]{ T [ } F {
c c c
= . Un exemplu de sistem cu bucl deschis este un
sistem cu compensarea intrrii, n care un bloc funcional furnizeaz un set de intrri
156
de control } u {
c
ce depind de forele exterioare )} t ( F {
e
sau, mai general, de intrrile
externe )} t ( u {
e
, aplicate sistemului (fig. 5.2).
)} t ( u ]{ P [ } u {
e c
= (5.8)
B C
A
{u }
{y}
+
+
{z} {z}
.
c
c
P
+
e
B
{u }
e
Fig. 5.2
n fig. 5.2.se d diagrama bloc a structurii cu mai multe grade de libertate,
controlat de un sistem cu bucl deschis. Matricea de control a sistemului de control
] P [ are un numr de linii egal cu numrul de intrri de control i un numr de
coloane egal cu numrul intrrilor externe. Numrul total de ecuaii de micare ale
sistemului controlat poate fi obinut introducnd ecuaia (5.8) n ecuaia (5.7):
=
+ + =
)} t ( z ]{ C [ )} t ( y {
)} t ( u ]){ B [ ] P ][ B ([ } z ]{ A [ } z {
e e c
&
(5.9)
n general, un sistem cu bucl deschis necesit o comand la intrare care
aplicat acestuia determin o ieire dorit. Este deci necesar o foarte bun
cunoatere a dinamicii sistemului controlat i de regul controlul cu bucl deschis se
aplic ca o component de reacie nainte n sistemele de control cu reacie invers.
Rspunsul liber al sistemului nu este n acest caz afectat de prezena
sistemului de control, care influeneaz doar rspunsul forat. Aceast facilitate este
ns strns legat de linearitatea sistemului. Cu ajutorul transformatei Laplace i
considernd c la momentul t=0 toate variabilele de stare sunt nule, funcia de
transfer ce leag ieirile sistemului de intrrile externe poate fi uor calculat:
]) B [ )] s ( P ][ B ([ ]) A [ ] I [ s ]( C [ )] s ( G [
e c
1
+ =
(5.10)
Se observ c funciile de transfer ale sistemului de control depind de
variabila s.
5.2.6. Controlul cu bucl nchis
S considerm o structur controlat de un sistem cu bucl nchis (fig. 5.3).
Intrrile de referin )} t ( r { interacioneaz cu ieirile din sistem } y { pentru a furniza
157
intrri de control potrivite } u {
c
pentru un set de actuatori ce produc forele de
control. Actuatorii pot fi sisteme active dar pot fi i elemente pasive, cum ar fi un arc.
Fig. 5.3
n fig. 5.3.a. este dat diagrama bloc a sistemului cu mai multe grade de
libertate, controlat de o bucl de reacie invers, iar n fig. 5.3.b. se d diagrama bloc
general a unui sistem cu reacie invers n domeniul Laplace.
Funciile de transfer ale sistemului controlat i ale sistemului de control sunt
notate cu ) s ( G i respectiv ) s ( H .
Dac vom considera un sistem SISO (cu o singur intrare i o singur ieire),
fr nici o perturbaie exterioar, deci 0 )} t ( F {
e
= , atunci ieirea ) t ( y este legat de
intrarea de referin ) t ( r prin urmtoarea relaie scris n domeniul Laplace:
)] s ( y ) s ( H ) s ( r )[ s ( G ) s ( y = (5.11)
Funcia de transfer a buclei nchise este:
) s ( H ) s ( G 1
) s ( G
) s ( r
) s ( y
+
= (5.12)
n cazul sistemelor MIMO (cu mai multe intrri i mai multe ieiri), legtura
dintre intrare i ieire este dat de relaia:
)} s ( r )]{ s ( G [ )]) s ( H )][ s ( G [ ] I ([ )} s ( y {
1
+ = (5.13)
Ecuaia de stare a sistemului controlat este dat de asemeni de ecuaia (5.7),
dar acum intrrile de control } u {
c
sunt dependente de ieirile sistemului } y { i de
intrrile de referin )} t ( r { : } y ]{ P [ } r ]{ Q [ } u {
c
= (5.14)
unde dimensiunile tuturor vectorilor i matricelor depind de numrul intrrilor de
control i de referin i de numrul ieirilor sistemului. Ecuaia de micare a
sistemului controlat este:
( ) )} t ( u ]{ B [ )} t ( r ]{ Q ][ B [ } z { ] C ][ P ][ B [ ] A [ } z {
e e c c
+ + = & (5.15)
Dac sistemul de control este de tip regulator, vectorul } r { conine doar
constante ce definesc punctul de reglare. n cazul n care scopul sistemului de control
este de a menine structura ntr-o poziie de echilibru static, n condiiile n care avem
fore perturbatoare )} t ( F {
e
, intrarea de referin este egal cu zero i ecuaia de
158
micare poate fi simplificat. Trebuie remarcat faptul c prezena buclei de control
influeneaz att comportarea liber a sistemului ct i rspunsul forat al acestuia.
Astfel, stabilitatea real a sistemului poate fi afectat. Dei sistemul de control
are rolul de a mri stabilitatea structurii sau de a oferi o stabilitate artificial unui
sistem instabil, pot s apar i situaii n care sistemul de control introduce
instabiliti nedorite n unele moduri proprii de vibraii. De aceia trebuie studiat
comportamentul sistemului cu mult atenie pentru a evita astfel de situaii.
Diagrama bloc a structurii cu mai multe grade de libertate, controlat de un
sistem cu reacie invers a ieirii corespunztoare ecuaiei (5.15) este prezentat n
fig. 5.4. Acest tip de reacie invers este de obicei numit reacie invers a ieirii,
deoarece bucla este nchis utiliznd doar ieirile sistemului.
Fig. 5.4
Fig. 5.5
Proiectarea unui astfel de sistem de control const n determinarea matricelor
de transfer ] P [ i ] Q [ care permit sistemului s aib comportamentul dorit.
Un tip mult mai complet de reacie invers este reacia invers a variabilelor de
stare, prezentat n diagrama bloc a structurii cu mai multe grade de libertate din fig.
5.5, n care toate variabilele de stare sunt utilizate pentru a nchide bucla. Intrrile de
control sunt obinute n acest caz cu ecuaia } z ]{ P [ } r ]{ Q [ } u {
c
= , iar produsul
] C ][ P [ din ecuaia (5.15) trebuie nlocuit cu matricea ] P [ . De regul reacia invers
159
de stare este considerat o situaie ideal, iar din motive practice i datorit faptului
c este imposibil de msurat un numr mare de variabile de stare, se utilizeaz reacia
invers a ieirii.
Ca alternativ este utilizarea unui sistem ce estimeaz variabilele de stare pe
baza ieirilor disponibile, sistem numit observer. Acest lucru este posibil dac
sistemul este observabil. Observerul este un sistem capabil s genereze la ieire o
aproximare } z { suficient de exact a variabilelor de stare } z { ale sistemului, atunci
cnd la intrare primete ieirile } y { i intrrile } u { ale sistemului.
Ecuaia dinamic a observerului are forma:
} y ]{ D [ } u ]{ B [ } z ]{ A [ } z {
0 0 0
+ + = & (5.16)
unde dimensiunile matricelor pot fi determinate din numrul variabilelor de stare, de
intrare i de ieire ale sistemului. Schema unui sistem cu reacie invers a variabilelor
de stare bazat pe prezena unui observer este prezentat n fig. 5.6, unde matricea
] B [
0
a fost nlocuit cu matricea ] B [
c
. Intrrile de control sunt obinute ca n cazul
reaciei inverse de stare, unde este folosit starea estimat } z { furnizat de observer
n locul strii reale } z { .
Fig. 5.6
Utiliznd transformata Laplace i considernd c la momentul iniial t=0
valoarea tuturor variabilelor de stare este zero, funcia de transfer a buclei nchise,
care leag ieirile )} s ( y { ale sistemului de intrrile externe )} s ( u {
e
, cnd toate
intrrile de referin sunt egale cu zero, poate fi calculat cu uurin.
Pentru un sistem cu reacie invers a ieirii avem:
( ) ] B [ ] C )][ s ( P ][ B [ ] A [ ] I [ s ] C [ )] s ( G [
e
1
c
+ = (5.17)
i n acest caz funciile de transfer ale sistemului de control depind de
variabila Laplace s. Polii sistemului cu bucl nchis sunt n acest caz rdcinile
ecuaiei caracteristice:
160
( ) 0 ] C )][ s ( P ][ B [ ] A [ ] I [ s det
c
= + (5.18)
Ecuaii similare se obin i pentru sisteme cu reacie invers a strilor i
pentru funcii de transfer ce leag ieirile de intrrile de referin )} s ( r { .
5.2.7. Calculul matricelor de transfer prin metoda alocrii polilor
Eficiena unui sistem de control poate fi evaluat n cteva moduri, ncepnd
cu metoda determinrii erorii prin ncercri, utilizat nc n mod frecvent, pn la
cele mai sofisticate metode ale teoriei controlului optim. Ultima, aplicat tot mai des,
se bazeaz cel mai adesea pe minimizarea unor indici de performan cum ar fi
eroarea sistemului de control, costul sau energia necesar pentru funcia de control.
Indicii de performan pot fi de exemplu de forma:
| |
+ =
0
2
c 1
2
1
dt )} t ( u ]{ W [ )} t ( z ]{ W [ J (5.19)
unde cu } x { a fost notat norma euclidian a vectorului } x { . Aceast formulare se
utilizeaz atunci cnd se urmrete minimizarea integralei n timp a abaterii de la
condiia ca toate variabilele de stare s fie egale cu zero, cum ar fi erorile de control
i intrrile de control, care n anumite condiii sunt dependente de energia necesar
pentru funcia de control. Diferitele variabile de stare i diferitele intrri pot avea
influene diferite, iar matricele ] W [
1
i ] W [
2
sunt introduse ca indici de performan.
Proiectarea detaliat a sistemului de control depete cadrul acestei lucrri i
prin urmare vor fi date cteva detalii doar n privina metodei alocrii.
Fie un sistem cu reacie invers de stare i cu matrice de transfer constant.
Iniial considerm c sistemul are o singur intrare ) 1 r ( = i prin urmare
matricea de transfer ] P [ ce trebuie determinat este o matrice cu o singur linie i n
coloane. Matricea ] Q [ se reduce la un scalar iar matricea ] B [
c
este un vector de
ordin n. Pentru a descrie comportarea liber a sistemului n termenii frecvenelor
naturale, se stabilesc cele n frecvene naturale
1
s ,
2
s , ,
n
s ale matricei dinamice
] P ][ B [ ] A [
c
. Dac acestea sunt complexe, trebuie s avem i valorile conjugate
pentru a obine o valoare real a ctigului.
Ecuaia caracteristic a sistemului este n aceste condiii:
0 ) s s ( ... ) s s )( s s ( ]) P ][ B [ ] A [ ] I [ s det(
n 2 1 c
= = + (5.20)
Cele n valori proprii pot fi utilizate pentru a calcula cei n coeficieni ai
polinomului caracteristic. Egalnd cu zero membrul stng al relaiei (5.20) cu
161
coeficienii astfel calculai, se obin n ecuaii care se pot utiliza pentru a calcula cele n
elemente necunoscute ale matricei ] P [ . Calculul necunoscutelor se poate face uor
utiliznd formula lui Ackermann:
] N [ ] H ][ 1 , 0 ..., , 0 , 0 , 0 [ ] P [
1
= (5.21)
unde ] H [ este matricea de controlabilitate definit de ecuaia (5.5), iar matricea ] N [
este obinut din coeficienii: a
o
, a
1
,..., a
n-1
, ai polinomului caracteristic (indicii indic
puterea necunoscutei) cu ajutorul formulei:
] I [ a ... ] A [ a ] A [ a ] A [ ] N [
0
2 n
2 n
1 n
1 n
n
+ + + + =
(5.22)
Dac matricea de controlabilitate, care n cazul unui sistem cu o singur
intrare este o matrice ptratic, e nesingular, se poate calcula cu uurin matricea de
transfer ] P [ a sistemului de control. Totui aceasta este o situaie teoretic deoarece
n practic evaluarea numeric a matricei ] P [ pentru sisteme a cror ordin al matricei
dinamice este mai mare poate fi afectat de erori numerice mari.
n cazul sistemelor multivariabile situaia este mult mai complicat. Matricea
de transfer ] P [ are r linii i n coloane astfel nct numrul necunoscutelor este n r ,
n timp ce rdcinile ecuaiei caracteristice i coeficienii polinomului caracteristic
sunt doar n numr de n. Una din metodele de rezolvare a problemei const n a
considera c matricea ] P [ este de forma ] P }[ T { ] P [
1
= , unde } T { este un vector
format din r constante arbitrare iar ] P [
1
este o matrice necunoscut cu o linie i n
coloane. Problema multivariabil poate fi transformat uor ntr-o problem cu o
singur intrare, introducnd expresia anterioar pentru ] P [ n ecuaia caracteristic a
sistemului controlat, care n aceste condiii va deveni:
( ) 0 ] P }[ T ]{ B [ ] A [ ] I [ s det
1 c
= + (5.23)
Ecuaia (5.1) este ecuaia caracteristic a unui sistem cu aceiai matrice
dinamic ca a sistemului original dar cu matricea de transfer a intrrii transformat
din ] B [
c
n } T ]{ B [
c
. Astfel problema poate fi rezolvat, odat ce sunt stabilite cele r
constante ce intr n vectorul } T { . Faptul c sistemul iniial este controlabil nu
garanteaz ns c sistemul modificat are aceiai proprietate. Rezolvarea acestei
probleme depinde att de alegerea constantelor arbitrare dar i de caracteristicile
sistemului iniial.
5.2.8. Proiectarea observerului
S considerm un sistem controlat de o reacie invers a variabilelor de stare
bazat pe un observer. Ecuaiile ce permit studiul comportrii buclei nchise sunt:
162
} z ]{ P [ } r ]{ Q [ } u { , } y ]{ D [ } u ]{ B [ } z ]{ A [ } z {
, } z ]{ C [ } y { , } u ]{ B [ } u ]{ B [ } z ]{ A [ } z {
c 0 c 0 0
e e c c
= + + =
= + + =
&
&
(5.2)
Eroarea introdus de observer } e {
0
poate fi definit ca diferen dintre starea
actual a sistemului } z { i starea } z { aproximat de observer: } z { } z { } e {
0
= .
Scznd a treia ecuaie din (5.24) din prima ecuaie, obinem:
( )
( ) } u ]{ B [ } u { ] B [ ] B [
} e ]{ A [ } z { ] C ][ D [ ] A [ ] A [ } e {
e e c 0 c
0 0 0 0 0
+ +
+ + = &
(5.3)
Matricele ] A [
0
i ] B [
0
definesc comportamentul observerului. Dac sunt ndeplinite
condiiile: ] C ][ D [ ] A [ ] A [
0 0
= i ] B [ ] B [
c 0
= , ecuaia (5.5) se reduce la:
( ) } u ]{ B [ } e { ] C ][ D [ ] A [ } e {
e e 0 0 0
+ = & (5.26)
Considerm c ecuaia (5.26) descrie comportamentul liber al sistemului.
Dac prile reale ale tuturor valorilor proprii ale matricei
] C ][ D [ ] A [ ] A [
0 0
= sunt negative, eroarea introdus de observer tinde la zero
atunci cnd timpul tinde la infinit, iar observerul este stabil. Astfel, observerul poate
fi proiectat stabilind un set de valori proprii pentru matricea ] A [
0
a cror pri reale
sunt negative i apoi minimiznd intervalul de timp dintre momentul n care a fost
estimat vectorul de stare i momentul la care este dat vectorul de stare actual.
Alegerea polilor trebuie s fie un compromis ntre dorina de a avea un
rspuns rapid i necesitatea de a elimina perturbaiile.
Calculul matricei ] D [
0
, astfel nct matricea ] A [
0
s aib valorile proprii
dorite, este simpl. Aici matricea corespunztoare este
T
0
T T
] D [ ] C [ ] A [ iar metoda
alocrii polilor permite calculul elementelor matricei ] D [
0
, ceea ce nseamn c
rangul matricei de observabilitate ] O [ este n, deci sistemul este observabil.
n acest caz procedura este simpl dac sistemul are o singur ieire, n timp
ce pentru sisteme multivariabile trebuiesc fcute unele alegeri arbitrare.
Ecuaia de stare pentru sistemul complex prezentat n fig. 5.8 este:
)
`
+
)
`
+
)
`
=
)
`
} 0 {
} r ]{ Q ][ B [
} u ]{ B [
} u ]{ B [
} e {
} z {
] C ][ D [ ] A [ ] 0 [
] P ][ B [ ] P ][ B [ ] A [
} e {
} z {
c
e e
e e
0 0
c c
0
&
&
(5.27)
Ecuaia caracteristic a sistemului cu bucl nchis este:
0
] C ][ D [ ] A [ ] I [ s ] 0 [
] P ][ B [ ] P ][ B [ ] A [ ] I [ s
det
0
c c
=
(
+
+
(5.28)
163
sau echivalent:
( ) ( ) 0 ] C ][ D [ ] A [ ] I [ s det ] P ][ B [ ] A [ ] I [ s det
0 c
= + + (5.29)
Rdcinile ecuaiei (5.29) sunt valorile proprii ale sistemului controlat
nsumate cu valorile proprii ale observerului iar pri ale ecuaiei caracteristice pot fi
rezolvate separat.
5.2.9. Legi de control fundamentele
n paragraful precedent am considerat c controlerul furnizeaz o serie de
intrri de control } u { sistemului controlat, intrri determinate ca nite combinaii
liniare dintre ieirile sistemului } y { sau ale variabilele de stare } z { i intrrile de
control )} t ( r { . n cazul controlului ieirilor, dac numrul r al intrrilor este egal cu
numrul m al ieirilor i cele dou matrice de transfer ] P [ i ] Q [ sunt egale, legea de
control de acest tip poate fi simplificat n continuare la forma
}) y { } r ]({ K [ } e ]{ K [ } u {
p y p
= = , unde elementele vectorului )} t ( e {
y
reprezint
erorile ieirilor sistemului, iar matricea ] K [
p
conine coeficienii de transfer ai
sistemului de control.
Acest tip de control este numit control proporional (transferul n acest caz
fiind numit transfer proporional). Controlul proporional realizeaz o corecie
important atunci cnd erorile instantanee sunt mari. Are marele avantaj c este foarte
simplu, ns are i cteva dezavantaje cum ar fi o scdere a preciziei n anumite
situaii i posibilitatea producerii instabilitilor.
ntr-un anume sens acest tip de control rigidizeaz sistemul.
O alt posibilitate, aplicabil de asemenea la sistemele liniare, este aa
numitul control derivativ, care n cazul sistemelor cu o singur intrare i o singur
ieire, poate fi scris n forma:
dt
de
K u
y
d
=
Acest tip de control reacioneaz mai mult la creterea erorii dect la eroarea
efectiv, realiznd o corecie mai important atunci cnd eroarea are o rat de cretere
mai mare. Controlul derivativ introduce n sistem o amortizare i mrete astfel
stabilitatea. Are ns dezavantajul c este insensibil la erorile constante i prea puin
sensibil la erorile ce se acumuleaz lent. Este astfel posibil s cauzeze o deviaie a
ieirii sistemului, dar acest dezavantaj nu este critic n controlul sistemelor mecanice,
unde sistemul de control are sarcina de a preveni vibraiile, iar reacia sa la forele
statice sau cvasistatice are o importan redus.
164
n micarea armonic, eficiena sa crete o dat cu frecvena perturbaiei.
O a treia lege fundamental de control este legea de control integral, care
poate fi exprimat prin relaia:
=
t
0
y i
dt ) t ( e K u
Un astfel de sistem de control reacioneaz la acumularea erorilor i
determin o aciune de control cu reacie lent. Dezavantajul su este n primul rnd
acela c este insensibil la frecvene ridicate i este predispus la introducerea n sistem
a instabilitilor.
Datorit diferitelor caracteristici ale legilor de control, adesea se utilizeaz o
lege ce combin tipurile de control prezentate anterior i uneori chiar i alte tipuri de
control bazate pe derivate sau integrale de ordin superior. Acest tip de control este
numit control proporional-integral-derivativ (PID). n domeniul Laplace, relaia
dintre intrrile de control ale sistemului ) s ( u i eroarea ) s ( e
y
pentru un sistem de
control de tip PID cu o intrare i o ieire poate fi exprimat prin relaia:
) s ( e K
s
1
K sK ) s ( e ) s ( P ) s ( u
y i p d y
|
.
|
\
|
+ + = = (5.30)
Ecuaia (5.30) definete transferul sistemului de control ca funcii n domeniul
Laplace. n cazul reaciei inverse de stare, intrrile de control sunt influenate de toate
variabilele de stare ale sistemului, i prin urmare i de viteze.
Un control pur proporional are n acest caz unele dintre proprietile
controlului derivativ i n particular are un efect de amortizare. Trebuie observat c
funcia de transfer este de regul o funcie de variabila Laplace s sau n cazul
rspunsului armonic, o funcie de frecvena care depinde de configuraia fizic
efectiv a sistemului de control. Un prim efect, care adesea este nedorit, este datorat
imposibilitii tuturor sistemelor de control i a actuatorilor de a reaciona instantaneu
la intrrile date de senzori. Pentru a modela aceast ntrziere se consider c
sistemul de control acioneaz ca un sistem de ordinul unu, deci sistemul este condus
de o ecuaie diferenial de ordinul I. Pentru un controler proporional cu o singur
intrare i o singur ieire o astfel de ecuaie are forma:
y
ke u u = + & .
Funcia de transfer a sistemului de control n acest caz este:
+
=
s 1
1
k
) s ( u
) s ( e
y
(5.31)
Semnificaia fizic a parametrilor k i este urmtoarea: k este factorul de
amplificare a sistemului de control, iar este constanta de timp a unei intrri n
165
treapt. Rspunsul adimensional ) t ( g a unui sistem de ordinul 1, la o intrare de tip
treapt unitate este dat de relaia (5.32).
) e 1 ( k ) t ( g
/ t
= (5.32)
Rspunsul n frecven a unui sistem de ordinul unu poate fi obinut cu
uurin din funcia de transfer (5.31) nlocuind pe s cu i.
Separnd partea real de cea imaginar, obinem:
) arctg( ,
1
k
)] ( H [
,
1
k
| ) ( H | ,
1
k
)] ( H [
2 2
2 2
2 2
=
+
=
+
=
+
=
(5.33)
Fig. 5.7
Fig. 5.8
n fig. 3.8 este dat diagrama Bode a rspunsului n frecven pentru un
sistem de ordinul I. Frecvena circular = / 1
g
este aa numit frecven de tiere.
Trebuie observat c perioada corespunztoare frecvenei de tiere definit aici
nu coincide cu constanta de timp, avnd valoarea = 2 T
g
.
166
Sistemul de ordinul unu acioneaz deci ca un filtru trece jos cu o atenuare, la
frecvene mai mari dect frecvena de tiere, de 6 dB/octav sau 20 dB/decad.
Un astfel de sistem introduce i un defazaj al rspunsului care crete de la
zero la frecvene foarte sczute, la 90 atunci cnd frecvena tinde la infinit.
La frecvena de tiere defazajul este 45. Eficiena sistemului de control scade
rapid la frecvene mai mari dect frecvena de tiere.
n cazul sistemelor de control multivariabile, o lege ce permite introducerea
unei anumite ntrzieri ntr-un sistem cu reacie invers de la ieire este:
}) y { } r ]({ P [ } u { } u {
c c
= + &
Ecuaia sistemului controlat poate fi exprimat prin relaiile:
( ) } y ]{ P [ } r ]{ Q [
1
} u {
1
} u {
} z ]{ C [ } y {
} u ]{ B [ } u ]{ B [ } z ]{ A [ } z {
c c
e e c c
=
=
+ + =
&
&
(5.34)
Sau altfel scris:
)
`
+
)
`
(
(
=
)
`
} 0 {
} u ]{ B [
} r ]{ Q [
1
} 0 {
} u {
} z {
] I [
1
] C ][ P [
1
] B [ ] A [
} u {
} z {
e e
c
c
c
&
&
(5.35)
Asemntor, n cazul reaciei inverse realizate prin intermediul unui observer,
ecuaia de stare a sistemului controlat poate fi scris n forma:
( ) } z ]{ P [ } r ]{ Q [
1
} u {
1
} u {
} y ]{ D [ } u ]{ B [ } z ]{ A [ } z {
} u ]{ B [ } u ]{ B [ } z ]{ A [ } z {
c c
0 c 0 0
e e c c
=
+ + =
+ + =
&
&
&
(5.36)
Sau altfel scris:
(
(
(
} u ]{ B [
} 0 {
} u ]{ B [
} 0 {
} r ]{ Q [
1
} 0 {
} e {
} u {
} z {
] C ][ D [ ] A [ ] 0 [ ] 0 [
] P [
1
] I [
1
] P [
1
] 0 [ ] B [ ] A [
} e {
} u {
} z {
e e
e e
0
c
0
c
0
c
&
&
&
(5.37)
Constanta de timp a combinaiei dintre sistemul de control i actuatori este un
parametru foarte important i poate impune alegerea unei metode de studiu
particulare, mai ales atunci cnd se lucreaz cu frecvene nalte.
n cele mai multe cazuri sistemul de control poate fi modelat ca un sistem de
ordinul I doar cu o aproximare foarte grosier. Toate tipurile de sisteme de control
pot furniza o ieire limitat n amplitudine. Cnd se atinge rspunsul maxim, apare
167
fenomenul de saturaie i amplificarea scade o dat cu creterea semnalului de la
intrare, obinndu-se astfel un rspuns neliniar.
Pe lng prezena frecvenei de tiere, o dependen a legii de control de
frecven poate fi obinut prin introducerea unui compensator cu o lege
corespunztoare ) s ( K . De exemplu, dac frecvenele perturbaiilor sunt bine
determinate, un sistem de control ideal trebuie s aib o amplificare foarte mic, cu
excepia frecvenelor perturbaiilor ce trebuiesc suprimate.
Un suport ce izoleaz un sistem mecanic de perturbaiile exterioare trebuie s
se comporte ca un sistem foarte rigid pentru toate frecvenele, cu excepia celor care
trebuiesc suprimate, i pentru care rigiditatea trebuie s tind la zero.
Utiliznd un compensator, rspunsul n frecven al sistemului poate fi ajustat
astfel nct acesta s rezolve n mod optim sarcinile pentru care a fost proiectat.
Pentru aceasta se utilizeaz sisteme de control electronice, care pot fi
proiectate pentru a obine aproape orice funcie de transfer dorit i permit ca ieirea
solicitat s nu depeasc limita maxim. n multe cazuri, unii din parametrii
sistemului nu sunt cunoscui cu precizie sau sunt predispui la modificarea n timp.
Sunt multe exemple din domeniul dinamicii structurilor, cum ar fi cazul
amortizrii cu histerezis, care este puin cunoscut i este afectat de muli parametri
ntr-un mod adesea imposibil de controlat.
Unul dintre avantajele sistemelor de control cu reacie invers este acela c
ele pot de regul s compenseze aceste efecte nedorite, msurnd direct ieirile i
acionnd pentru a le pstra n limitele fixate. Sistemele de control cu reacie invers
sunt de asemenea capabile s compenseze incertitudinile i variaiile parametrilor lor.
Un sistem care este puin afectat de schimbrile condiiilor de operare, prin
variaia parametrilor i prin perturbaiile exterioare este considerat un sistem robust,
robusteea fiind una din cerinele de baz ale sistemului de control.
n general sensibilitatea mrimii q la variaia parametrului este msurat de
derivata q . Calculnd sensibilitile caracteristicilor principale ale sistemului
(valori proprii, rspunsul n frecven etc.) la variaia parametrilor critici este posibil
stabilirea robusteii acestuia. Sensibilitatea rdcinii
, i
S a celei de a i-a rdcin
i
s a
funciei de transfer la parametrul , poate fi definit astfel
) ln(
s s
S
i i
, i
=
|
.
|
\
|
(5.38)
168
Derivata este n cele mai multe din cazuri calculat numeric, dnd o mic
variaie parametrului aflat n studiu i calculnd o valoare nou pentru valoarea
caracteristic a sistemului.
5.2.10. Abordarea modal a controlului sistemelor mecanice
Ecuaiile de micare ale sistemelor controlate, atunci cnd acioneaz forele
de control } F {
c
, pot fi reduse la forma modal prin intermediul vectorilor proprii ai
sistemului neamortizat:
} F { ] [ } F { ] [ } ]{ K [ } ]{ C [ } ]{ M [
e
T
c
T
+ = + + & & & (5.39)
Trebuie observat c relaia (5.39) este valabil att pentru sisteme discrete ct
i pentru sisteme continue, cu singura diferen c n cazul sistemelor continue sunt
teoretic o infinitate de moduri proprii. Vectorii proprii vor fi considerai normalizai
astfel nct masele modale vor avea valoare unitar, deci matricea masei modale este
o matrice unitar. Matricea de amortizare modal nu este n general o matrice
diagonal iar modurile proprii nu sunt decuplate. Cu toate acestea, deoarece
structurile n cele mai multe cazuri au o amortizare foarte slab, cuplarea modurilor
este destul de redus iar matricea modal de amortizare poate fi aproximat cu o
matrice diagonal anulnd elementele care nu sunt pe diagonal.
Ecuaia modal n spaiul fazelor este:
=
+ + =
} z ]{ C [ } y {
)} t ( u ]{ B [ )} t ( u ]{ B [ } z ]{ A [ } z {
e e c c
&
(5.40)
unde:
(
=
(
=
(
=
)
`
=
] 0 [
] T [ ] [
] B [ ,
] 0 [
] T [ ] [
] B [
] 0 [ ] I [
] K [ ] C [
] A [ ,
} {
} {
} z {
e
T
e
c
T
c
&
(5.41)
iar matricea de transfer a ieirii leag ieirea } y { a sistemului de coordonatele
modale. Dac matricea de amortizare are form diagonal, prima ecuaie din (5.40) se
decupleaz ntr-un numr de perechi de cte dou ecuaii, fiecare contribuind cu o
singur coordonat modal. Aceast decuplare care de obicei este doar aproximativ,
nu mai poate fi aplicat odat ce n ecuaie este inclus un sistem de control cu bucl
nchis. Cuplajul datorat sistemului de control poate fi foarte puternic, mult mai
puternic dect cel corespunztor amortizrii care este de asemenea neglijat.
169
ntr-un fel, efectul aciunii sistemului de control poate fi de asemenea asimilat
cu cel al unei amortizri foarte puternice i unele moduri proprii ale sistemului de
control pot fi chiar supraamortizate. n acest caz nu se mai poate presupune c avem
amortizri mici. Separat de cuplajul puternic datorat amortizrii introduse, prezena
sistemului de control schimb aspectul modurilor proprii.
Este adevrat c aspectul modurilor proprii poate fi exprimat ca o combinaie
a modurilor proprii ale sistemului necontrolat, dar aceasta duce mai departe la
accentuarea cuplrii modale. Datorit acestei cuplri, rezultatele obinute considernd
doar un numr limitat de moduri proprii n proiectarea sistemului de control
reprezint doar o aproximare a comportamentului modelului complet.
n particular, erorile introduse de faptul c ieirea sistemului } y { este
influenat doar de modurile proprii ce au fost neglijate se numesc erori de observare.
Erorile introduse de faptul c forele de control ale sistemului de control nu
influeneaz doar modurile proprii considerate ci i pe cele neglijate sunt numite erori
de control. Aceste erori pot determina sistemul s se comporte ntr-un mod diferit de
cel prevzut, iar n unele cazuri poate duce chiar la instabilitatea sistemului.
Trebuie reinut faptul c sistemele active sunt predispuse la instabilitate
deoarece energia este furnizat structurii, iar dac acest lucru are loc ntr-un mod
necorespunztor se poate ajunge la excitarea unor moduri proprii, n loc de
amortizarea lor.
Dac se utilizeaz un observer pentru a aproxima doar un numr redus de
moduri proprii, este mult mai bine s se utilizeze o ecuaie ce consider vectorii } z {
(de ordin n care conin coordonatele modale i derivatele lor) i } z { (de ordin
r
n , cu
n n
r
< , i care conin valorile estimate ale coordonatelor modale pentru care se face
controlul i derivatele lor):
)
`
+
)
`
+
)
`
+
)
`
=
)
`
} r ]{ Q ][ B [
} r ]{ Q ][ B [
} 0 {
} u ]{ B [
} 0 {
} u ]{ B [
} z {
} z {
] P ][ B [ ] A [ ] C ][ D [
] P ][ B [ ] A [
} z {
} z {
0
c e e e e
0 0 0
c
&
&
(5.42)
unde ultimul termen ce conine intrarea de referin )} t ( r { n cele mai multe cazuri se
poate neglija.
Matricele au dimensiuni diferite i se combin astfel nct s se obin o
matrice dinamic a buclei nchise care are n n + linii i tot attea coloane. Valorile ei
proprii sunt rdcinile buclei nchise a sistemului, iar studiul lor permite estimarea
erorilor. Pericolul apariiei erorilor sugereaz necesitatea evitrii abordrii modale
cnd se proiecteaz sistemul de control pentru o structur.
170
Controlul modal a fost totui utilizat cu succes n multe cazuri oferind o
soluie simpl de proiectare a sistemului de control, mai ales atunci cnd numrul
modurilor proprii considerate este mic. Posibilele pericole datorate erorilor trebuiesc
avute ntotdeauna n vedere i de multe ori este recomandat o evaluare a efectelor
modurilor proprii de ordin superior.
De notat c ecuaiile (5.40) i (5.42) se menin i n cazul sistemelor continui,
odat ce caracteristicile lor modale au fost determinate.
Ele conin doar o form de control proporional, dar forele de control sunt
legate de vitezele modale, sistemul de control furniznd o form de amortizare
asemntoare cu cea din cazul controlului derivativ.
5.3. Strategii de control activ
5.3.1. Introducere
Cauza primar a zgomotului generat de maini n funcionare sunt vibraiile
mecanice generate de surse localizate n interiorul mainilor.
Vibraiile sunt micri oscilante care apar ca rezultat al aplicrii unor fore
oscilante sau variabile asupra unei structuri. Vibraiile pot fi continui sau
intermitente, periodice sau neperiodice. Natura oscilaiei depinde de natura forei
exercitate i de natura structurii.
Sursele de vibraii sunt generate de toate mecanismele care realizeaz fore
variabile n funcionare. Numai o cantitate foarte mic din energia sursei de vibraii
este radiat direct, majoritatea energiei fiind transmis prin structurile mainii ctre
suprafeele exterioare i convertit n sunete radiante (zgomot).
Structurile i sistemele mecanice se proiecteaz n vederea realizrii unor
performane superioare sub diferite tipuri de sarcini exterioare, n particular sarcini
dinamice i tranzitorii. n prezent exist trei strategii fundamentale pentru controlul
rspunsului acestor sisteme:
control pasiv;
control activ;
control semi-activ.
Tradiional, vibraiile mecanice i zgomotul au fost reduse prin aplicarea de
tehnici de amortizare pasiv, prin folosirea unor materiale care absorb vibraiile.
n acest caz, structurile mecanice trebuie s aib n componena lor izolatori
pentru disiparea energiei, ceea ce conduce la creterea performanelor sistemelor
respective. Acest tip de control nu necesit o surs de energie exterioar, principalul
avantaj fiind reprezentat de robusteea acestor izolatori.
Ca dezavantaj se menioneaz imposibilitatea modificrii coeficientului de
amortizare, ceea ce conduce la comportri diferite n cazul schimbrii condiiilor
exterioare, de exemplu la frecvene joase, amortizarea pasiv are un efect limitat.
171
Cercetrile recente n procesarea semnalului digital i n tehnologia de actuare
au deschis posibilitatea folosirii controlului activ pentru reducerea vibraiilor
mecanice i a zgomotului. Deoarece aceste tehnici se folosesc cel mai bine pentru
frecvene joase, acestea au fost completate cu tehnici convenionale de amortizare
pasive, care sunt mai eficiente la frecvene nalte.
Sistemele de control semi-activ sunt recent dezvoltate, ele realiznd un
compromis ntre sistemele de control pasive i cele active. Acesta const, n
modificarea proprietilor componentelor pasive utiliznd controlul activ.
Sistemele de control semi-activ nu sunt capabile s introduc energie ntr-o
structur, dar se pot obine rezultate favorabile prin disiparea selectiv a energiei.
De exemplu, controlul semi-activ al vibraiilor este folosit pentru a aplica o
for secundar cu ajutorul creia se elimin solicitarea exterioar primar prin
modificarea proprietilor structurii, cum ar fi rigiditatea i amortizarea.
Spre deosebire de sistemele active, sistemele de control semi-activ controleaz
forele care se opun micrii structurii respective.
n sistemele de control activ sunt utilizate, n special, dou tipuri de control
pentru eliminarea perturbaiilor: controlul feedback (reacie invers) i controlul
feedforward (reacie anticipat).
5.3.2. Controlul feedback
n cazul controlului feedback, prezentat principial n figura 5.9, mrimea de
ieire y este comparat cu mrimea de referin r, rezultnd eroarea y r e = care
este introdus n regulatorul H(s) i aplicat sistemului G(s).
La proiectarea sistemului de control feedback trebuie realizat o acordare
optim a regulatorului automat H(s), n scopul asigurrii criteriilor de stabilitate i de
performan ale sistemului de control.
Fig. 5.9
n cazul structurilor slab amortizate, controlul feedback este utilizat n dou
scopuri distincte i complementare, pentru realizarea unei amortizri active i pentru
realizarea unui control feedback al micrii sistemului. Amortizarea activ realizeaz
atenuarea vrfurilor de rezonan ai funciei de transfer a circuitului nchis:
( )
( )
( ) GH 1
GH
s r
s y
s F
+
= =
n acest caz F(s) are valori foarte apropiate de G(s) cu excepia vrfurilor de
rezonan, unde amplitudinea este redus.
172
Amortizarea activ poate fi realizat cu amplificri moderate i fr un model
al sistemului fizic, avnd o stabilitate garantat, cu condiia ca actuatorii i traductorii
folosii s aib o dinamic corespunztoare.
Deoarece actuatorii i traductorii au o dinamic finit rezult c orice sistem de
control cu amortizare activ va fi eficient ntr-o band de frecven finit.
Obiectivele controlului activ pot urmri i realizarea unei poziii variabile a
sistemului mecanic la o valoare dorit, n prezena unor perturbaii externe, ntr-un
domeniu de frecven impus.
Reducerea efectului perturbaiilor externe necesit valori mari ale produsului
GH, n banda de frecven n care perturbaiile sunt semnificative. Dar GH >> 1 dac
funcia de transfer F(s) a circuitului nchis este egal cu 1, ceea ce nseamn c
mrimea de ieire y urmrete mrimea de intrare r cu acuratee.
n general, pentru a realiza aceasta, avem nevoie de o strategie complex care
implic un model matematic al sistemului de control activ.
5.3.3. Controlul feedforward
Acest control este preferat atunci cnd este disponibil un semnal de referin
corelat cu perturbaia i folosete un filtru adaptiv pentru filtrarea perturbaiilor.
n figura 5.10. este prezentat schema de principiu a controlului feedforward,
care a fost dezvoltat n special pentru controlul zgomotului, dar este foarte eficient i
pentru controlul vibraiilor. Semnalul de referin este corelat cu semnalul generat de
vibraia primar, dup care este trecut printr-un filtru adaptiv i aplicat din nou la
intrarea sistemului ca semnal secundar.
Fig. 5.10
Coeficienii filtrului adaptiv sunt modificai n aa fel nct eroarea semnalului
de ieire s fie minim. n acest scop se genereaz o vibraie secundar care anuleaz
efectul vibraiei primare, n locul n care sunt plasai traductorii de eroare.
Desigur, nu exist nici o garanie c rspunsul global al sistemulului este redus
i n alte locaii, putnd exista locuri n care rspunsul s fie amplificat.
Controlul feedforward este eficient n tot sistemul atunci cnd este dominant
un singur mod de vibraie.
Amortizarea activ poate s atenueze vibraia n zona rezonant, n timp ce
controlul feedforward se realizeaz pentru orice frecven, prin generarea unui
semnal de vibraie n opoziie de faz cu vibraia primar, pentru a o anula complet.
173
Metoda nu are nevoie de un model al sistemului ntruct procedura de adaptare
se bazeaz pe msurarea rspunsului la impuls.
Controlul feedforward este mai puin sensibil la faza de ntrziere, fa de
controlul feedback i de aceea poate fi folosit la controlul semnalelor de frecven
nalt din domeniul acusticii.
Metoda este foarte bun pentru controlul activ al vibraiilor n band ngust,
dar au fost dezvoltate i aplicaii n band larg de frecven.
Limitarea principal a controlului feedforward este dat de faptul c filtrul
adaptiv are nevoie de un semnal de referin corelat cu vibraia primar. Semnalul de
referin este dat de un traductor plasat pe calea de propagare a perturbaiei.
Controlul feedforward poate fi considerat ca un control local spre deosebire de
controlul feedback care este global.
Pentru perturbaiile generate de mainile rotative semnalul de referin poate fi
considerat semnalul dat de un traductor de turaii, care msoar turaia unui arbore n
micare de rotaie. n tabelul 5.1 sunt prezentate avantajele i dezavantajele celor
dou metode de control.
Tabelul 5.1
Tipuri de control Avantaje Dezavantaje
Feedback;
Amortizare
activ;
Model de baz
(LQG, h);
- nu necesit model;
- garanteaz funcionarea
sistemului;
- are efect global;
- atenueaz toate perturbaiile
de la frecven de rezonan.
- este eficient numai n zona
de rezonan;
- banda de frecven limitat;
- amplific perturbaiile n
afara domeniului de
frecven controlat.
Feedforward;
Filtru adaptiv
(filtru LMS);
- nu necesit model;
- band de frecven larg;
- lucreaz mai bine n band
ngust de frecven;
- are nevoie de un semnal de
referin;
- este un control local;
- rspunsul poate fi amplificat
n alte zone ale sistemului;
- necesit un calcul laborios
n timp real.
5.4. Sisteme adaptive
5.4.1. Caracteristicile generale ale filtrelor adaptive
Filtrul adaptiv poate s-i optimizeze caracteristica prin modificarea
parametrilor funcionali, fiind constituit dintr-un filtru digital, cu parametri reglabili
i un algoritm adaptiv, concretizat ntr-un bloc de calcul ce determin valorile optime
pentru coeficieni, realiznd o reglare automat a acestora. Alegerea algoritmilor
adaptivi, pentru diverse structuri de filtre, se realizeaz innd seama de urmtorii
factori:
174
viteza de convergen, exprimat prin numrul de iteraii necesare pentru a se
ajunge la o soluie suficient de apropiat de cea optim, n condiiile unui
mediu staionar;
dezadaptarea ce exprim msura n care forma final a erorii medii ptratice
difer fa de eroarea medie ptratic dat de filtrul optim;
capacitatea de urmrire a variaiilor statistice ale semnalelor, n condiiile n
care acestea nu sunt staionare;
robusteea algoritmului este legat de capacitatea acestuia de a opera chiar n
cazul unor date care ridic probleme de calcul numeric;
complexitatea algoritmului evaluat prin numrul de operaii aritmetice
efectuate n fiecare iteraie i capacitatea de memorie necesar;
structura se refer la modul de implementare hardware a filtrului i a
algoritmului adaptiv;
proprietile numerice sunt legate de erorile de cuantizare, stabilitate
numeric, precizia numeric n reprezentarea coeficienilor.
Un algoritm este numeric robust dac este insensibil la variaia numrului de
bii cu care se opereaz.
5.4.2. Configuraii de sisteme adaptive
n raport cu funciile pe care le ndeplinesc, sistemele adaptive pot fi realizate
n patru configuraii:
a) Identificarea adaptiv urmrete modelarea unui sistem necunoscut cu
ajutorul unei funcii de transfer raionale. n acest caz se aplic acelai semnal de
testare x att sistemului ct i filtrului adaptiv, obinndu-se la ieirea sistemului
necunoscut un semnal dorit pentru ieirea filtrului adaptiv (fig. 5.11).
Fig. 5.11
Dac sistemul este dinamic, modelul va fi i el variabil n timp.
Pentru ca rspunsul n domeniul timp ale celor dou sisteme s coincid trebuie
s coincid i funciile de transfer. Dac sistemul necunoscut este un sistem cu
rspuns finit la impuls (fr poli n afara originii), filtrul adaptiv va fi i el un filtru cu
rspund finit la impuls (FIR). Identificarea corect a sistemului necunoscut ntr-o
gam ct mai larg de frecvene depinde de alegerea semnalului test. Identificarea
sistemelor este o problem major pentru controlul activ al vibraiilor i zgomotului.
175
b)Modelarea invers
Aceast configuraie permite identificarea unui sistem necunoscut prin
conectarea acestuia n cascad cu filtrul adaptiv (fig. 5.12).
Dac eroarea este nul rezult c funcia de transfer global a sistemului
necunoscut i a filtrului adaptiv se reduce la o ntrziere. Deci, n general, funcia de
transfer a filtrului adaptiv va aproxima inversul funciei de transfer a sistemului
necunoscut, fr s fie o identitate din cauza prezenei inevitabile a zgomotului.
Schema de modelare are avantajul c anuleaz efectul unei funcii nedorite.
n cazul modelrii inverse, filtrul adaptiv este un filtru cu rspuns infinit la
impuls (IIR), avnd numai poli la distan finit.
Fig. 5.12
Realizarea unor filtre adaptive cu rspuns infinit la impuls este o problem
mult mai dificil dect a unor filtre FIR.
Modelarea invers este posibil numai dac sistemul necunoscut este de faz
minim, ntruct, n caz contrar ar rezulta un filtru instabil i se prefer prima metod.
Dac sistemul are numai poli este mai uor de realizat modelarea invers care
presupune un filtru adaptiv FIR.
c) Configuraia predictiv
Predicia presupune o estimare a unei valori viitoare a semnalului aplicat, ceea
ce nu se poate realiza fizic. Pentru a evita acest obstacol, se aplic filtrului secvena
de intrare ntrziat, iar ieirea acestuia este comparat cu eantionul prezent
(fig.5.13).
Fig. 5.13.Configuraie predictiv
Prin minimizarea erorii, se realizeaz o predicie optim a semnalului de
intrare. Se poate utiliza ieirea 1, realizndu-se filtrarea erorii de predicie, sau
ieirea 2, sistemul lucrnd ca predicator.
Eventual, poate fi utilizat un filtru cu coeficieni identici cu cei ai filtrului
adaptat, pentru a filtra direct semnalul nentrziat.
Configuraia predictiv se poate utiliza la controlul activ al zgomotului, la care
producerea semnalului pentru anularea zgomotului poate fi modelat cu ajutorul unor
generatoare de zgomot cuplate cu un filtru liniar, de tip IIR, eventual fr nuluri la
distan finit. La fiecare moment de eantionare, se determin i eroarea de predicie.
176
d) Configuraia pentru suprimarea interferenelor
n aceast configuraie se urmrete reducerea unui semnal perturbator,
suprapus peste semnalul util, dac se dispune de un semnal puternic corelat cu
perturbaia (fig. 5.14). Semnalul primar este format din semnalul util peste care se
suprapune un semnal perturbator.
Trebuie creat un semnal asemntor celui perturbator care s fie sczut din
semnalul primar, folosind un semnal de referin. Acesta este creat de filtrul adaptiv.
Fig. 5.14
5.4.3. Filtre Wiener cu rspuns finit la impuls
Fie d(n) semnalul util, v(n) zgomotul suprapus peste semnalul util i x(n)
semnalul perturbat, care reprezint valorile msurate. S presupunem c x(n) i d(n)
reprezint realizri particulare ale unor procese staionare, cu valori medii nule.
Notnd cu J(n) rspunsul filtrului, dorim ca filtrul s estimeze ct mai fidel
semnalul dorit d(n) (fig. 5.15), deci ne propunem s determinm filtrul astfel nct
acesta s minimizeze eroarea definit de relaia: e(n) = d(n) j(n)
Fig. 5.15
Ca funcie cost (reprezint funcia de estimare a controlului) se poate utiliza
eroarea medie ptratic definit de relaia:
{ }
2
) n ( e E J =
n cazul filtrelor Wiener funcia cost este definit printr-o medie statistic a
ptratului modulului erorii, iar expresia coeficienilor optimi este dependent de
funciile de autocorelaie ale secvenei de intrare i corelaia ntre aceasta i valoarea
dorit d(n). Aceste medii statistice sunt n unele cazuri necunoscute, aa nct o
alegere mai practic a funciei cost o poate constitui suma ptratelor modulelor
erorilor, efectuat pe un interval dat.
2
i
i n
2
1
) n ( e J
=
=
Metoda de optimizare care pornete de la minimizarea funciei cost este
cunoscut sub denumirea de metoda celor mai mici ptrate.
177
Dac vom considera o structur de filtru transversal prezentat n fig. 5.16,
putem scrie:
) n ( x ) n ( w ) n ( d ) k n ( x ) n ( w ) n ( d ) n ( j ) n ( d ) n ( e
H
1 N
0 k
*
k
= = =
=
x(n) = [x(n), x(n-1),..., x(n-N+1)]
T
,
S presupunem c dispunem de setul de eantioane:
x(1), x(2),..., x(M), cu M>N
Exist diverse posibiliti de alegere a limitelor de nsumare i
1
i i
2
.
Avnd n vedere c n expresia lui J intervin eantioane de la i
1
-N+1 la i
2
, o
alegere normal a acestor doi parametri este i
1
=N, i
2
=M, aa nct n expresia lui J
intervin numai eantioanele cunoscute ale observaiei.
Fig. 5.16
Vor trebui deci determinai coeficienii filtrului, pentru care:
2
M
N n
) n ( e J
=
= este minim.
Filtrele cu rspuns finit la impuls prezint avantajul simplitii, att ca structur
de realizare, ct mai ales, sub aspectul algoritmilor adaptivi utilizai.
Aceste filtre asigur performane satisfctoare n multe aplicaii, motiv pentru care
au fost intens utilizate n practic. Exist totui situaii n care se impune utilizarea
unor filtre cu rspuns infinit la impuls (IIR). Filtrele IIR au avantajul c pot realiza
maxime pronunate (rezonane), ceea ce este mai dificil de obinut cu un filtru FIR.
5.4.4. Sisteme adaptive cu semnale de prob
Semnalele de prob sunt utilizate n sistemele de control activ n scopul
identificrii sistemului, putnd fi: semnale sinusoidale, semnale de tip impuls sau
zgomot alb.
Zgomotul alb este cel mai utilizat semnal de prob, pentru c nu perturb
sensibil procesul de funcionare normal. n figura 5.17 este prezentat schema de
principiu a unui sistem adaptiv cu semnal de prob de tip zgomot alb.
Peste semnalul de intrare x este suprapus zgomotul alb n
i
generat de
generatorul G. Rspunsul sistemului este compus din rspunsul la semnalul de intrare
178
x i rspunsul la zgomotul alb n
i
. Circuitul de adaptare cuprinde elementul de
identificare (corelatorul automat), care permite obinerea funciei pondere a
sistemului w(), elementul de calcul EC, care stabilete modificarea parametrilor de
acord ai regulatorului i elementul de execuie EE
ad
al circuitului de adaptare, care
modific parametrii de acord.
Fig. 5.17
Elementul de calcul acioneaz conform indicelui de performan IP i
genereaz un semnal de comand H prin care sunt apreciate caracteristicile dinamice
ale sistemului.
Modificarea funciei w(t) sub influena perturbaiei parametrice determin o
variaie a lui H i elementul de execuie EE
ad
acioneaz n sensul modificrii unui
parametru al regulatorului pentru a compensa aceast modificare.
n general, modelul matematic al sistemelor adaptive continue are forma unor
ecuaii difereniale neliniare cu coeficieni variabili. Comportarea sistemului n
ansamblu depinde n mod esenial de performanele tranzitorii ale circuitului de
adaptare, asigurndu-se n acest mod gradul de invarian dorit ale performanelor
sistemului. Verificarea stabilitii i calculul rspunsului tranzitoriu al circuitului de
adaptare se realizeaz greu, din cauza complexitii modelului matematic.
La proiectarea unui sistem adaptiv trebuie s se asigure o identificare continu,
n mod automat, cu precizie ct mai mare, a sistemului precum i elaborarea strategiei
de conducere a procesului n concordan cu variaiile parametrilor care
caracterizeaz procesul.
5.5. Alegerea actuatorilor pentru controlul activ al vibraiilor
5.5.1. Introducere
n structurile inteligente, n care se urmrete controlul activ al vibraiilor, este
necesar utilizarea actuatorilor, traductorilor i a controllerului. Dei n ultimii ani s-
au fcut progrese semnificative n proiectarea controllerului, n privina aparaturii, al
algoritmilor de control i a softului, acetia nu se potrivesc ns la proiectare cu
actuatorii i traductorii.
179
Actuatorii sunt module din structura sistemelor mecatronice care utilizeaz
puterea generat de o surs pentru a aciona elementele componente urmtoare, n
micare de rotaie sau n micare de translaie. Construcia actuatorilor depinde de
natura sursei de energie, cel mai des fiind utilizate energia electric, hidraulic sau
pneumatic, care sunt convertite n micare mecanic prin utilizarea motoarelor
rotative sau liniare. Energia electric reprezint cea mai frecvent sursa de energie
utilizat, ceea ce explic i marea diversitate a motoarelor electrice. Actuatorii
electrici sunt cei mai rspndii n componena sistemelor mecatronice.
Actuatorii pot fi configurai n dou moduri:
cu aciune direct;
cu aciune inerial.
Actuatorii electrici pot fi: cu reluctan variabil, electrodinamici,
magnetostrictivi, piezoelectrici.
Actuatorii electrodinamici au fost folosii muli ani n testarea sistemelor
mecanice la vibraii, avnd un pre redus, dar un gabarit mare i o mas mare,
raportate la fora generat, motiv pentru care sunt utilizai n prezent numai la unele
sisteme de control activ.
Actuatorii magnetostricitivi i piezoelectrici au cptat o utilizare mai larg n
ultimul timp ntruct sunt mai compaci i pot genera fore mari, raportate la mrimea
lor. Actuatorii de vibraii sunt utilizai cu succes la izolarea activ a vibraiilor la
autovehicule, elicoptere, motoare navale etc.
La controlul vibraiilor de nalt frecven, generate de angrenajul de acionare
al elicei elicopterului, care se propag n suportul acesteia i respectiv n fuzelaj, sunt
utilizai actuatorii magnetorestrictivi care pot genera fore variabile cu frecven
nalt i sunt compaci.
5.5.2. Caracteristicile actuatorilor, necesare la izolarea activ a vibraiilor
S considerm sistemul prezentat n figura 5.18, care reprezint un actuator plasat
ntre o surs de vibraie i un receptor, cu rigiditile dinamice
s
k , i respectiv
r
k .
Fig. 5.18
S notm cu
r
k rigiditatea dinamic intern a actuatorului i cu
a
F fora pe care
trebuie s o dezvolte actuatorul pentru a aduce receptorul n stare de repaus.
180
Pentru a determina condiiile pe care trebuie s le ndeplineasc actuatorul, ca
s realizeze aceast funcie, vom presupune c micarea vibratorie este dominant pe
o singur ax. Comportarea dinamic a sistemului este descris de ecuaiile:
r r r
x k F =
( )
s r i r a
x x k F F =
unde
r
F este fora intern dintre actuator i receptor. Dac receptorul este adus n
stare de repaus, atunci
r
x = 0 i rezult 0 F
r
= . Pentru a ndeplini aceast condiie,
fora dezvoltat de actuator trebuie s fie egal cu:
s i a
x k F =
Dac vom lua n considerare interaciunea dintre surs i actuator, rezult c
fora dezvoltat de actuator
a
F are aceeai mrime, dar este de sens opus fa de fora
creat de rigiditatea dinamic intern a actuatorului. Se observ c nu exist nici o
for intern ntre surs i actuator. Rezult c deplasare sursei
s
x este egal cu
deplasarea liber, care reprezint deplasarea sursei n absena oricrei mase auxiliare
condus de fora
p
F . Prin urmare actuatorul trebuie s aib capacitatea de a genera
deplasri care s egaleze deplasarea liber a sursei.
Aceast deplasare poate fi msurat cu uurin sau prescris, dac se cunoate
puterea sursei i rigiditatea dinamic intern.
Se poate vedea c efectul controlului activ al vibraiilor este de a deconecta,
ntr-un sens dinamic, receptorul de la surs. Sursa va vibra ca i cum nu este ataat
de receptor, iar receptorul va rmne n stare de repaus.
Pentru stabilirea caracteristicilor actuatorului este util s considerm actuatorul
separat de restul sistemului.
Actuatorul poate fi caracterizat de doi parametri: fora de blocare care poate fi
generat
b
F i deplasare liber
f
x . Fora de blocare este fora pe care actuatorul o
genereaz cnd este blocat micarea acestuia, iar deplasarea liber este deplasarea
realizat de actuator atunci cnd micarea acestuia este liber, fr constrngeri.
Rigiditatea dinamic intern
i
k a actuatorului este legat de cele dou variabile
prin ecuaia:
f i b
x k F =
Rezult c n condiii suboptimale, de control activ, actuatorul prezentat n
figura 5.18, poate fi considerat ca un actuator neconstrns care trebuie s nving
propria rigiditate dinamic intern. Dac deplasarea liber a actuatorului este mai
mare dect deplasarea liber a sursei, atunci actuatorul este capabil s izoleze
receptorul de surs. Dac nu este ndeplinit aceast condiie atunci deplasarea
actuatorului trebuie amplificat pn cnd | x | | x |
s f
>> .
Odat cu creterea capacitii de deplasare rezult o scdere corespunztoare a
forei de blocare datorit legii conservrii energiei. Pentru un actuator neblocat,
puterea instantanee furnizat de actuator
f b
v F este constant, indiferent de
amplificarea vitezei libere
f
v (
f
v este viteza liber a actuatorului, care este legat de
deplasarea liber prin relaia:
f f
x i v = , unde 1 i = , iar este pulsaia).
181
Rezult c dac vom amplifica deplasarea liber cu factorul de amplificare A,
atunci fora de blocare va fi atenuat cu factorul A, iar rigiditatea dinamic intern a
dispozitivului devine:
2
i
A / k .
Exist situaii, cnd la actuator sunt conectate elemente adiionale; n figura
5.19.b este prezentat actuatorul montat n paralel cu un element adiional, iar n figura
5.19.c actuatorul este montat n serie cu elementul adiional.
Elementul adiional montat n paralel, de rigiditate
par
k , poate fi montat de
exemplu pentru a susine sarcina static a sursei sau receptorului, iar elementul
adiional n serie poate introduce n model o rigiditate adiional sau o mas, putnd fi
asociat cu mecanismul de deplasare amplificat, discutat mai sus.
Dac elementul adiional este montat n paralel atunci fora de blocare este
neafectat, dar mrimea efectiv a dinamicii interne a actuatorului este suma
rigiditii dinamice interne a actuatorului original i rigiditatea dinamica a
elementului adiional. Deplasarea liber este redus prin factorul: ( )
i par
k / k 1+
n cazul n care rigiditatea dinamic a elementului paralel este comparabil cu
rigiditatea dinamic intern a actuatorului atunci elementul adiional va fi un factor
important care determin deplasarea liber a actuatorului. n cazul elementului
adiional montat n serie cu actuatorul, deplasarea liber nu este afectat, n schimb
fora de blocare este atenuat cu factorul
i s
k / k 1+ , unde k
s
este rigiditatea
elementului adiional. Acesta ns nu trebuie s aib un efect asupra performanelor
actuatorului. Dac elementul adiional este o mas rigid m, atunci rigiditatea
dinamic a masei adiionale este m k
2
m
= , iar deplasarea liber este redus cu
factorul
i m
k / k 1+ , iar fora de blocare este neafectat.
a) b)
c)
Fig. 5.19
n acest caz, la frecvene joase, rigiditatea
m
k are valori mici i nu influeneaz
deplasarea liber a actuatorului, n timp ce la frecvene nalte, raportul
i m
k / k poate
avea valori mari determinnd o reducere a deplasrii libere.
182
5.6. Stabilitatea sistemelor de control activ
O condiie necesar, dar nu i suficient, pentru ca un sistem automat s poat
fi utilizat n practic este stabilitatea sistemului, respectiv proprietatea sistemului de a
restabili prin aciunea s-a un nou regim staionar, n condiiile n care sub aciunea
variaiei mrimii de intrare sau a perturbaiilor a fost scos din regimul staionar
anterior. Pentru un sistem stabil durata regimului tranzitoriu este limitat.
Un sistem instabil nu este utilizabil, deoarece nu poate realiza pe cale automat
o lege de dependen dorit ntre mrimea de ieire i cea de intrare.
Verificarea stabilitii unui sistem automat reprezint cea mai important faz a
analizei unui sistem, ntruct, gradul de stabilitate al unui sistem automat d o
informaie global despre comportarea sistemului.
Stabilitatea relativ a unui sistem caracterizeaz gradul de stabilitate i se
definete n raport cu variaia unor parametri ai sistemului. Acesta permite
determinarea valorilor optime ale parametrilor sistemului care asigur performanele
cele mai bune. Un sistem este stabil dac rspunsul liber, sau rspunsul la intrarea
impuls unitar, tinde spre zero, atunci cnd timpul tinde spre infinit.
0 ) t ( y lim
l
t
=
n general, un sistem stabil este acela care la intrri limitate are ca rspuns
ieiri limitate.
Pentru mbuntirea stabilitii sistemelor de control activ sunt utilizate mai
multe metode, dintre care cele mai uzuale sunt: modificarea factorului de amplificare
al sistemului deschis, folosirea unor elemente de corecie de tip anticipativ sau a unor
circuite de tip derivativ plasate pe calea de reacie.
Micorarea factorului de amplificare al sistemului deschis, n vederea corectrii
stabilitii se poate aplica numai la sistemele de tip zero i de tip unu.
Scderea factorului de amplificare la sistemele de tip zero determin, ns, o
cretere a erorii n regim staionar al rspunsului la semnal treapt, determinnd i o
reducere a preciziei sistemului de control.
Introducerea n sistem a unui element de anticipaie are ca efect o mbuntire
a vitezei de rspuns a sistemului i poate determina i o cretere a gradului de
stabilitate pentru anumite sisteme.
O mbuntire a stabilitii relative a unui sistem de control se poate obine i
prin utilizarea unei reele de corecie de ntrziere, n cazul n care este impus
valoarea coeficientului de eroare a sistemului, avnd ca efect: reducerea lrgimii
benzii de frecven a sistemului, creterea duratei procesului tranzitoriu i mrirea
preciziei, prin creterea valorii coeficientului de eroare, pentru o stabilitate relativ
dat. Folosirea unei corecii de tip anticipaie ntrziere mbin avantajele
ambelor tipuri de corecii prezentate, determinnd o comportare dorit a sistemului
pentru o band de frecven mai mic dect poate realiza reeaua de anticipaie.
Pentru analiza stabilitii sistemelor de control activ se poate utiliza criteriul
algebric Routh-Hurwitz sau criteriul frecvenial Nyquist.
183
5.7. Transmiterea puterii vibraiei n structurile mecanice i utilizarea ei
n controlul activ al vibraiilor
5.7.1. Introducere
Msurarea puterii vibraiilor permite o evaluare unitar a energiei poteniale i
cinetice a acestora.
Reducerea vibraiei transmise, prin reducerea forei transmise sau a
amplitudinii vitezei, neglijnd unghiul fazei relative, poate s nu fie neaprat o soluie
reuit.
Pe de alt parte, o mbuntire poate fi asigurat prin reducerea puterii nete a
vibraiei transmise unei structuri.
n continuare este prezentat o metod de reducere a puterii vibraiei transmise
unei structuri, prin controlul activ al vibraiei cu ajutorul unui semnal de eroare, care
este proporional cu puterea vibraiei transmise, utiliznd n acest scop un filtru
adaptiv LMS. Puterea transmis poate fi utilizat pentru a minimiza funcia cost n
sistemele de control activ al vibraiei, ceea ce presupune o serie de dificulti n
implementarea sa.
5.7.2. Puterea vibraiei transmise n cazul unei excitaii armonice.
Excitaia armonic care acioneaz asupra unui sistem elastic poate fi
exprimat sub form complex. Valoarea instantanee a puterii transmise poate fi
calculat cu relaia:
) v f
( ) v ( ) f
( v f P = =
unde
f i v sunt conjugatele complexe ale forei, respectiv vitezei, f i v sunt partea
real a forei i respectiv vitezei. Fora i viteza pot fi exprimate prin componentele
reale i imaginare:
*
1
f (f f )
2
= +
*
1
v (v v )
2
= +
Rezult:
* *
1
f v [ (f v ) (f v )]
2
= +
unde
*
f i
*
v sunt complexele conjugate ale forei i respectiv vitezei.
Integrnd puterea n funcie de timp i mprind-o la timp, vom obine puterea
medie. Fora i viteza pot fi scrise sub forma:
j t
f F e
+
=
j t
v V e
+
=
unde este pulsaia excitaiei, iar i sunt unghiurile de faz.
Dac nlocuim n ecuaiile anterioare obinem expresia puterii:
184
1
P FV[cos(2 t ) cos( )]
2
= + + +
Primul termen cosinus din aceast ecuaie este o funcie periodic, avnd
pulsaia egal cu dublul pulsaiei excitaiei. Al doilea termen cosinus este constant i
dependent de faza relativ ( ) dintre fora de excitaie i viteza vibraiei.
Puterea medie a vibraiei transmise se obine integrnd ecuaia n funcie de
timp i mprind la durata considerat. Valoarea medie a primului termen cosinus din
ecuaie se egaleaz cu zero i rezult:
t
1
f v FVcos( )
2
< > = sau sub forma
* *
t
1 1
f v (fv ) (f v)
2 2
< > = =
Cu aceast relaie se poate determina partea real a puterii medii n cazul unui
zgomot tonal, dar nu poate fi utilizat la zgomotul aleator.
5.7.3. Evaluarea puterii transmise cu ajutorul unui semnal de eroare
n continuare se prezint o metod simpl pentru generarea unui semnal
proporional cu puterea medie a vibraiei transmise la o frecven fundamental, care
poate fi utilizat ca semnal de eroare la controlul activ feedforward al vibraiei, cu
ajutorul unui filtru adaptiv de tip LMS. Metoda necesit heterodinarea unui semnal de
for i vitez, trecut printr-un filtru trece-jos, cu un semnal de referin.
Semnalul rezultat are aceiai frecven cu semnalul de referin i are o
amplitudine proporional cu puterea medie.
Transmiterea puterii vibraiei ntr-o structur mecanic este rezultatul unei
fore externe care poate fi msurat prin mai multe metode. Dou dintre cele mai
uzuale metode implic utilizarea unei matrice de accelerometre montate pe suprafaa
structurii sau o pereche format dintr-un traductor de for i unul de acceleraie,
montate n zona de aciune a forei externe.
Cele dou metode necesit cteva procesri adiionale ale semnalului, pentru
obinerea unui singur semnal, din dou semnale diferite. Problema utilizrii
transmiterii puterii vibraiei ca o funcie cost, cu un controller activ de tip LMS,
necesit calculul puterii unui semnal, care are frecvena egal cu dublul frecvenei
semnalului de referin. ntruct semnalul de eroare nu este corelat cu semnalul de
referin, rezult c algoritmul LMS nu va realiza minimizarea funciei cost.
La izolarea activ a vibraiei unei maini rotative aezat pe o suspensie
elastic, sursa principal a puterii vibraiei este ntotdeauna maina care vibreaz.
Puterea vibraiei este transmis printr-un izolator activ de vibraie care are un
actuator de control, n paralel cu un arc. Structura suportului are o amortizare finit,
care disip energia vibraiei. Pentru msurarea puterii vibraiei transmise, traductorii
de vitez i for pot fi fixai n conexiunea dintre izolatorul activ i suportul mainii.
Semnalul de referin poate fi obinut de la un tahometru ataat mainii rotative.
185
5.7.4. Consideraii teoretice
Pentru a calcula puterea transmis a vibraiei, semnalele de for i vitez
trebuie multiplicate mpreun. Semnalele electrice generate de traductoare pot fi
combinate cu ajutorul unui multiplicator electronic analog sau digital.
S considerm un semnal de referin x(t), un semnal de vitez v(t) i un
semnal de for f(t) date de relaiile:
t sin X ) t ( x =
) t sin( V ) t ( v + =
) t sin( F ) t ( f + =
unde: - este pulsaia semnalului de referin;
- X, V i F sunt amplitudinile reale ale semnalului de referin, vitez
i respectiv for;
- i sunt unghiurile de faz relativ ale semnalelor de vitez i de
for, fa de semnalul de referin.
Iniial vom considera produsul dintre semnalul armonic al forei f(t) i
semnalul armonic al vitezei v(t) care poate fi scris sub forma:
+ + +
= ) t 2 cos( [
2
V F
) t ( v ) t ( f cos(-)]
Ecuaia are o component armonic avnd pulsaia egal cu dublul pulsaiei
semnalului de referin i o component constant. Semnalul poate fi trecut printr-un
filtru trece-jos, pentru a extrage componenta constant (FV/2)cos(). Semnalul
obinut prin filtrare poate fi multiplicat cu semnalul de referin pentru a obine un
semnal P care este proporional cu puterea transmis, la pulsaia semnalului de
referin.
) t sin( ) cos(
2
RFV
P =
Semnalul reprezentat de ultima ecuaie este proporional cu puterea transmis a
vibraiei i poate fi utilizat ca semnal de eroare de un controller activ de vibraie.
Semnalul de eroare trebuie corelat cu semnalul de referin, ca parte a
condiiilor Wiener-Hopf ale aloritmului LMS.
Aceast metod nu este bun pentru controlul activ al semnalelor aleatoare,
ntruct operaiunea de filtrare are un timp stabilit finit i se realizeaz nainte ca
semnalul constant proporional cu puterea s fie obinut. n figura 5.20 este prezentat
diagrama bloc a sistemului de control activ, care utilizeaz puterea transmis ca un
semnal de eroare.
Semnalul de referin x(n) este aplicat asupra structurii determinnd vibraia
structurii cu fora principal de rspuns F
p
(n) i viteza de rspuns primar v(n) =
H
v
.F
p
, unde H
v
este funcia de transfer dintre fora principal F
p
(n) i viteza de
rspuns corespunztoare.
Semnalul de referin este simultan furnizat unui controller adaptiv, care se
adapteaz mai ncet, n comparaie cu rata de schimbare a semnalului de referin
186
x(n). Controllerul adaptiv filtreaz semnalul de referin pentru a obine un semnal de
control F
c
(n), dat de relaia:
F
c
(n) = W(n).X(n)
unde W(n) este un vector al coeficienilor filtrului W(n) iar X(n) este un vector al
valorilor trecute ale semnalului de referin. Acest semnal de control poate fi aplicat
unui vibrator de control care genereaz fora de control asupra structurii.
Fig. 5.20
Semnalul de control trece prin calea de anulare care poate fi modelat
matematic prin funcia de transfer H . Rspunsul amplificatoarelor de putere, al
vibratoarelor de control i al senzorilor de eroare (vitez i for) este inclus n funcia
de transfer a cii de anulare. Filtrul cii de anulare poate fi determinat folosind un alt
filtru adaptiv, ct timp funcioneaz controllerul sau poate fi determinat nainte de
utilizarea controllerului.
Viteza de rspuns deriv din multiplicarea forei de rspuns aplicat structurii
cu o funcie de transfer H
v
care este o funcie a dinamicii mecanice a sistemului.
Semnalul de control i semnalul primar sunt sumate algebric, astfel nct fora
total de rspuns F(n), care acioneaz asupra structurii, datorit aciunii surselor
primare de control, este dat de relaia:
F(n) = F
p
(n) F
c
(n) = F
p
(n) - W(n).X(n)
Viteza de rspuns corespunztoare esteV(n) = H
v
.F(n). Fora aplicat i viteza
de rspuns a structurii sunt combinate pentru a obine o msur a puterii transmise.
Urmnd procedura descris anterior, semnalele de for i vitez sunt
combinate astfel nct:
P
1
(n) = F(n).H
v
.F(n)
Ieirea din primul multiplicator P
1
(n) este filtrat trece-jos pentru a extrage
doar componenta continu a semnalului. Practic acesta este obinut cu un filtru trece-
jos, analog sau digital, cu frecvena de tiere n jurul a 10 Hz.
Filtrul trece-jos are o funcie de transfer dat Q, iar ieirea filtrului este dat
de: P
2
(n) = Q.P
1
(n)
Semnalul filtrat trece-jos P
2
(n) este multiplicat cu semnalul de referin x(n)
pentru obinerea semnalului de eroare e(n) la frecvena semnalului de referin, a
crei valoare medie este proporional cu puterea transmis ntr-o structur:
e(n) = x(n).P
2
(n)
187
Combinnd ecuaiile putem scrie semnalul de eroare ca:
e(n)=x(n).Q.H
v
.[F
p
(n)W.X].[F
p
(n)W.X]=x(n).Q.H
c.
Z.Z
unde: Z = F
p
(n) W.X
Funcia cost folosit de algoritmul LMS este dat de J = E[e(n)
2
], unde E este
operatorul statistic de ateptare. Substituind n funcia cost obinem:
J = E{[x(n).Q.H
v
.Z.Z].[ x(n).Q.H
v
.Z.Z]
T
unde exponentul T reprezint vectorul transpus.
Suprafaa de eroare are forma concav i este ntotdeauna pozitiv, ntruct
ptratul unui numr real Z este pozitiv.
5.7.5. Cercetri experimentale
Metoda de generare a unui semnal electric proporional cu puterea vibraiei a
fost investigat experimental prin msurarea puterii transmise ntr-o grind simplu
rezemat.
Multiplicarea i filtrarea trece-jos a semnalelor de vitez i for a fost realizat
cu un circuit analogic. Ieirea multiplicatorului a fost filtrat trece-jos, sub 10 Hz,
pentru a obine componenta DC a semnalului electric. Pentru amplificarea semnalelor
DC de nivele mici, a fost utilizat un amplificator de tensiune DC care a asigurat o
amplificare de 20 dB. Acest lucru a fost necesar pentru a putea multiplica
componenta DC, obinut n prima faz a procesului de multiplicare, cu semnalul de
referin, n cel de-al doilea multiplicator. La ieirea multiplicatorului rezult un
semnal proporional cu puterea vibraiei, la frecvena semnalului de referin.
Pentru structuri cu amortizare redus, semnalele de for i vitez sunt
defazate cu 90
o
, ceea ce face ca funcia cosinus a diferenei de faz s fie apropiat de
zero. Acest rezultat se obine n cazul semnalelor de amplitudini mici i de aici
rezult necesitatea liniarizrii sistemului.
Multiplicarea i filtrarea trece-jos a fost de asemenea implementat cu ajutorul
unei plci de achiziie AT-MIO-16E realizat de National Instruments i a softului
LabVIEW realizat de aceeai firm. Intrrile n placa de achiziii au fost semnalele de
referin, for i vitez.
Semnalele de for i vitez au fost multiplicate i filtrate cu ajutorul unui filtru
trece-jos de tip eliptic, cu frecvena de tiere de 30 Hz.
Semnalul de la ieirea din filtru a fost amplificat digital prin deplasarea biilor.
Semnalul rezultat a fost constant i a fost multiplicat n continuare cu semnalul
de referin. Semnalul obinut prin multiplicare este proporional cu puterea vibraiei
transmise la frecvena semnalului de referin, fiind cuplat la un canal de ieire al
plcii de achiziii de date. Raportul semnal/zgomot al sistemului de procesare a fost
mbuntit semnificativ cu ajutorul unui circuit analogic.
n fig. 5.21 este prezentat schema standului de control iar n fig. 5.22 este dat
schema lanului de procesare utilizat pentru verificarea metodei de control activ.
Pentru realizarea unei excitaii armonice s-a folosit un vibrator electrodinamic
4802/4817B&K alimentat cu amplificatorul de putere 2708B&K, comandat de
excitatorul de control 1047B&K. Excitaia sinusoidal a fost aplicat asupra unui
188
Fig.5.21
Fig. 5.22
189
izolator de vibraii ataat unei grinzi de dimensiuni: b=100 mm, h=10 mm i l=1000
mm. La baza izolatorului a fost montat un accelerometru 4335 B&K pentru
msurarea vitezei grinzii, la mbinarea cu izolatorul de vibraii.
Puterea vibraiei transmise a fost msurat cu ajutorul unui traductor de for
tensometric rezistiv, cuplat la puntea tensometric SC-2043-SG National Instruments
i un accelerometru 4335B&K cuplat la amplificatorul de sarcin 2635B&K, care
permite integrarea semnalului de acceleraie, pentru obinerea vitezei.
Semnalele de for i vitez i cele de referin au fost transmise plcii de
achiziie de date AT-MIO-16E National Instruments.
Excitatorul de control 1047B&K furnizeaz un semnal sinusoidal pentru
amplificatorul de putere care comand vibratorul electrodinamic i un semnal de
referin care este transmis plcii de achiziie. Testarea a urmrit compararea puterii
transmise cu semnalul de eroare obinut la ieirea plcii de achiziie, pentru a verifica
proporionalitatea, ntr-un domeniu de frecven cuprins ntre 40-200 Hz.
n fig. 5.23 este prezentat diagrama de variaie a tensiunii obinute la ieirea
plcii de achiziie, la diverse frecvene de referin i diagrama teoretic a puterii
transmise a vibraiei.
Fig. 5.23
Msurtorile au fost fcute n domeniul de frecven 40-200 Hz.
Tensiunea de la ieirea plcii de achiziie a fost amplificat cu 25 dB, pentru ca
diagrama de variaie s se suprapun aproximativ peste valorile calculate ale puterii
transmise a vibraiei. Din fig. 5.23 rezult c semnalul generat prin utilizarea metodei
propuse este aproximativ proporional cu puterea transmis a vibraiei.
Metoda combinrii semnalelor de vitez i for asigur un semnal proporional
cu puterea vibraiei transmise la frecvena conductoare. Acest semnal poate fi folosit
ca funcie cost ntr-un controller activ de vibraii de tip feedforward.
5.8. Controlul activ al vibraiilor la sistemul cu dou grade de libertate
S considerm un sistem format din dou mase m
1
i m
2
, legate prin arcuri i
amortizoare, excitat cu o for sinusoidal
0
F(t) F sin t = (fig. 5.24). Pentru controlul
activ al micrii se fixeaz un actuator de control ntre cele dou mase.
Ecuaiile difereniale de micare se obin punnd condiia de echilibru dinamic
(fig.5.24.b) pentru fiecare mas din sistem, conform principiului lui dAlambert:
190
Fig. 5.24
1 1 1 1 2 1 1 2 C
m x c (x x ) k (x x ) F(t) Q + + = && & &
(5.1)
2 2 1 1 2 1 1 2 C
m x c (x x ) k (x x ) Q = && & &
(5.2)
unde: - x
1
i x
2
sunt deplasrile independente ale celor dou mase rigide m
1
i
m
2
ale sistemului elastic;
- k
1
i k
2
reprezint rigiditile arcurilor;
- c
1
i c
2
sunt coeficienii de vscozitate ai amortizoarelor;
-
0
F(t) F sin t = este fora perturbatoare;
- Q
C
este fora de control activ.
5.8.1. Determinarea forei pentru controlul activ din condiia ca
deplasarea s fie nul
Actuatorul de control trebuie s furnizeze o for de anulare care s furnizeze
puterea vibraiei transmise la masa m
2
. n acest scop, vom presupune c actuatorul de
control furnizeaz o for de control care menine n stare de repaus masa m
2
, deci
reduce puterea transmis la zero. Acest lucru poate fi fcut utiliznd tehnici de
control de tip feedforward. Utilizarea unor tehnici de tip feedback nu este posibil
ntruct necesit un coeficient feedback infinit, ceea ce nu este practic.
Dac masa m
2
este staionar rezult c deplasarea acesteia este zero:
2
x 0 =
2 2
x j x 0 = = &
2
2 2
x x 0 = = &&
Ecuaiile (5.1) i (5.2) se reduc la:
2
1 1 1 1 1 1 C
m ( x ) k x c x F(t) Q = + &
2
1 1
C 2
1
(k j c )F(t)
Q
m
+
=
(5.3)
191
1 1 1 1 C
0 k x c x Q = + + &
C 1 1 1
Q (k j c )x = +
Rezult din relaia (5.3) c n cazul unui control optim, deplasarea masei m
2
este determinat de fora perturbatoare F(t) i de mrimea masei m
1
i nu de mrimea
rigiditii sau amortizrii suportului masei m
2
.
Fora de control va fi ntotdeauna egal n modul i opus ca sens forei elastice
dezvoltat de arcul k
1
i forei elastice dezvoltat de amortizorul C
1
.
Sistemele de izolare activ a vibraiilor pot fi concepute n aa fel nct n
timpul exploatrii s nu apar fore i momente care s nu poat fi anulate de fora
dezvoltat de actuatorul de control.
Controlul activ se poate aplica mai multor sisteme de izolare activ a
vibraiilor, reducnd la zero rspunsul fiecrui izolator n parte, deci se reduce
puterea vibraiei transmis la suport.
Rezult c la frecvene foarte joase, fora de control va fi comparabil cu fora
perturbatoare, ceea ce va crea dificulti practice n realizarea controlului.
Aceast analiz poate fi extins considernd o excitaie n band larg, ceea ce
va conduce la acelai rezultat. S-a dovedit c este posibil anularea complet a
vibraiei masei m
2
. Practic, un controller adaptiv de tip feedforward necesit un
semnal de referin care este corelat cu fora de excitaie de band larg, acesta
nefiind afectat de actuatorul de control.
n practic este dificil de obinut un asemenea semnal de referin. ntruct
semnalul de referin trebuie s fie cauzal, deci controllerul adaptiv trebuie s aib
suficient timp pentru calculul forei de control, din momentul obinerii semnalului de
referin, pn la aplicarea forei de control necesar pentru anularea vibraiei.
Dac controllerul nu are timp suficient, atunci actuatorul de control nu va putea
anula vibraia, va putea furniza doar o amortizare suplimentar n sistemul elastic.
Un experiment de izolare activ a vibraiilor, n cazul unei excitaii de band
larg, poate fi fcut utiliznd o surs de zgomot alb ca semnal de referin pentru un
controler adaptiv i un circuit de ntrziere care reine semnalul ntr-o memorie de tip
buffer circular, astfel nct controlerul adaptiv s aib timp suficient pentru calculul
forei de control optime. Semnalul ntrziat poate fi utilizat pentru comanda unui
amplificator de putere care alimenteaz un generator de vibraii pentru generarea unei
perturbaii primare.
5.8.2. Determinarea forei pentru controlul activ, din condiia ca puterea
vibraiei transmise s fie minim
La punctul anterior s-a presupus pentru calculul forei de control optime c
deplasarea masei m
2
este zero, ceea ce nseamn c transmiterea puterii vibraiei la
masa m
2
este nul, stabilindu-se condiiile necesare.
O alt metod pentru determinarea forei de control o constituie determinarea
ecuaiei puterii transmise pe baza forei de control, care poate fi rezolvat pentru a
determina puterea minim transmis. Ecuaiile difereniale de micare pentru sistemul
cu dou grade de libertate pot fi scrise matriceal sub forma:
192
2
C 1 1 1 1 1 1
2
C 2 1 1 2 1 2 1 2
F(t) Q x m k j c k j c
Q x k j c m (k k ) j (c c )
( + + ( (
=
( ( (
+ + + +
care poate fi scris mai compact sub forma:
C 11 12 1
C 21 22 2
F(t) Q A A x
Ax
Q A A x
( ( (
= =
( ( (
Deplasarea poate fi determinat prin inversarea matricei A, astfel nct B = A
-1
,
matricea B avnd coeficieni scalari, dai de ecuaiile:
11 12 11 12
21 22 21 22
B B A A
B B A A
( (
=
( (
22 12
21 11 11 22 12 21
A A
1
A A A A A A
(
=
(
Ecuaia (5.1) poate fi rezolvat astfel:
0 C 1 11 12
C 2 21 22
F Q x B B
Q x B B
( ( (
=
( ( (
(5.4)
Fora care acioneaz asupra masei m
2
se obine innd seama de fora de
control Q
C
cu ncrcarea arc-amortizor notat cu Q
b
. Viteza masei m
2
este dat de
derivata deplasrii x
2
(t).
Puterea medie P a vibraiei transmise la masa m
2
este:
*
b C 2
1
P [(Q Q )( j x ) ]
2
= + (5.5)
unde este partea real a termenului din parantezele ptrate, iar exponentul *
reprezint conjugata complex. Ecuaia (5.5) poate fi aranjat astfel nct termenul
vitez s apar primul. Dac l eliminm pe j lund partea imaginar ( ),
determinm o schimbare de semn la fel cum am obine conjugata transpus, din
matricea forei rezult matricea deplasrii.
*
2 b C
P [x (Q Q )]
2
= + (5.6)
Rearanjnd ecuaia (5.4) deplasrile x
1
i x
2
pot fi scrise sub forma:
1 11 0 C 12 C
x B (F Q ) B (Q ) = + (5.7)
2 21 0 C 22 C
x B (F Q ) B (Q ) = + (5.8)
b 1 2 1 1 2 1
Q k (x x ) j c (x x ) = + (5.9)
Aceste ecuaii pot fi introduse n ecuaia (5.6) fcnd substituiile necesare
pentru a determina puterea medie a vibraiilor transmise:
H H
C C C 1 2 C
P [Q aQ Q b b Q d]
2
= + + + (5.10)
unde:
1 1 1 2 1
a G (k j c )G G = + + (5.11)
1 1 1 1 3
b G (k j c )G = + (5.12)
H H H H
2 0 21 1 1 2 0 21
b F B (k j c )G F B = + + (5.13)
H H
0 21 1 1 3
d F B (k j c )G = + (5.14)
H H
1 22 21
G B B = (5.15)
2 22 21 11 12
G B B B B = + (5.16)
193
3 21 0 11 0
G B F B F = (5.17)
Exponentul H reprezint conjugata complex medie i transpusa unui vector.
n acest caz, elementele B
11
, B
12
, ... sunt scalare i, de aici ncolo exponentul H
va reprezenta doar conjugata complex. Transpusa are mai mult relevan pentru
grind, unde elementele B
11
, B
12
, ... sunt vectori sau matrice.
Termenii ecuaiei (5.10) pot fi descrii ca o rezisten a sursei de control.
Dac ar fi avut valoarea zero, sursa de control ar fi fost incapabil s transmit
orice putere de vibraie. Dac ar fi avut valori negative, ar fi absorbit energia de
vibraie n timpul oscilaiei.
b
1
reprezint capacitatea sistemului de control de a absorbi puterea sursei
primare;
b
2
reprezint capacitatea sistemului de control de a suprima ieirea sursei
primare de putere;
d este puterea vibraiei transmise n structura suport fr control activ.
Separnd termenii a, b1 ,b2 i d n parte imaginar i parte real i grupnd
doar prile imaginare mpreun, putem aranja ecuaia (5.10) n forma:
i i r
T T i r i 1
c c c 2 2 c
r r i
1
b a a
P q q q b b q d
2 b a a
( (
( = + + +
` ( (
)
(5.18)
unde termenii
(r )
a ,
(i)
a ,
(r )
b , ... reprezint prile reale, respectiv, imaginare a
scalarilor compleci a, b
1
, b
2
, i d.
Cu exponentul T se noteaz matricea transpus i:
r
C
c
i
C
Q
q
Q
(
=
(
(5.19)
Ecuaia (5.18) poate fi convertit ntr-o expresie echivalent, dup cum
urmeaz:
{ }
T T
c c c T c (i)
P q q q q d
2
= + + + (5.20)
unde:
(i) (i)T (r ) (r )T
T
(r ) (r)T (i) (i)T
a a a a 1
2 a a a a
( +
= =
(
+ +
(5.21)
(i)T (i)
2 1
(r )T (r)
2 1
b b 1
2 b b
( +
=
(
(5.22)
Pentru minimizarea ecuaiei (5.18) trebuie ca derivatele pariale ale prilor
reale i imaginare ale forei de control s fie egale cu zero:
T
( )
=
(5.23)
T
T
( )
( )
= +
(5.24)
T
( )
=
(5.25)
Punnd condiia ca derivatele pariale s fie zero, rezult:
194
r T (i) i i T r r T i i r T
C C C 1 2 T
C
(Putere)
(a ) Q (a (a ) )Q (a ) Q b (b )
Q
= + + + +
(5.26)
r i i i
C 1 2
Q inv(2a )(b b ) = + (5.27)
r T r i T i T r r r T
C C r C 1 2 i
C
(Putere)
(a ) Q (a ) Q a Q b (b )
Q
= + + +
(5.28)
i i r r
C 1 2
Q inv(2a )(b b ) = + (5.29)
n acest caz toi termenii ecuaiilor (5.26)...(5.29) sunt scalari, ceea ce
nseamn c operaia de transpunere poate fi ignorat.
Partea real i imaginar a forei de control pot fi nlocuite n ecuaia puterii
(5.18) pentru gsirea puterii minime pentru controlul activ optim al vibraiei masei
m
2
. Puterea de ieire real pentru controlul pasiv cnd
c
q 0 = , este dat de relaia:
(i)
pasiv
1
P c
2
= (5.30)
O reducere a puterii de ieire, ca rezultat al aciunii forei de control activ, va fi
obinut atunci cnd este respectat ecuaia (5.31):
'
pasiv activ
P P P 0 = > (5.31)
Cu alte cuvinte, vectorii for de control trebuie s satisfac urmtoarea
inegalitate, pentru a determina o micorare a puterii de ieire:
cT c cT T c
q q q q 0 + + < (5.32)
Funcia:
(c) cT cT T c
L(q ) q q q = + (5.33)
are un minim dat de relaia:
T 1
min
L
= (5.34)
Ecuaia (5.34) descrie puterea minim transmis la masa m
2
.
Aceast ecuaie poate fi rezolvat numeric.
5.8.3. Analiza eficienei controlului activ
Eficiena controlului activ al izolrii vibraiilor este determinat de:
utilizarea msurtorilor de putere ca un criteriu de eroare;
poziionarea actuatorului de control sau a forei de control aplicate;
erorile de msurare a funciilor de transfer i a formei de und a vibraiilor, n
cazul unei rezoluii n frecven inadecvat;
erorile de conversie a semnalului analog n digital i invers;
neliniaritile sistemului de control, al filtrelor, vibratoarelor i
amplificatoarelor de putere;
sensibilitatea transversal a accelerometrelor.
Erorile n amplitudine i faz n transmiterea puterii la masa m
2
sunt prezentate n
fig. (5.25) i (5.26). Analiza diagramelor prezentate n fig. (5.25) arat c erori mici
n amplitudine pot determina reducerea performanelor izolrii active a vibraiilor.
195
Fig. 5.25.
O eroare de 0,1% n amplificarea forei de control ne d o reducere de 60 dB n
puterea transmis, n loc de o reducere total aa cum rezult teoretic. Practic, ns,
acest rezultat este foarte bun. n fig. 5.26 sunt prezentate diagramele de variaie a
puterii transmise la masa m
2
n cazul unui defazaj sub-optimal al forei de control.
Din analiza diagramelor rezult c o eroare de 1
o
n faza de control a forei ne
d o reducere a puterii transmise a vibraiilor n jur de 40 de dB, n loc de o reducere
infinit, aa cum rezult teoretic.
O msurare exact a puterii transmise necesit utilizarea unor traductoare cu
erori de faz neglijabile. n realitate, toate traductoarele produc erori de faz.
Erorile de faz generate de traductor pot avea o component constant n timp
i una aleatoare, variabil n timp.
S considerm o eroare de faz la msurarea forei
b c
Q Q + , care acioneaz
asupra masei m
2
. Puterea transmis la masa m
2
este dat de relaia:
*
2 b c
P [x (Q Q )(cos( ) jsin( ))]
2
= + + (5.36)
Fig. 5.26.
196
Dezvoltnd aceast ecuaie obinem:
H H
c c c 1 2 c
P [(Q aQ Q b b Q c)(cos( ) jsin( ))]
2
= + + + + (5.37)
Se poate arta c eroarea de faz va corupe valoarea msurat a puterii
transmise cu un procent din puterea reactiv. n acest caz, fora de control
c
Q ce
minimizeaz ecuaia (5.37) este independent de eroarea de faz .
Din analiza diagramelor prezentate in fig. (5.27) rezult c puterea transmis la
masa m
2
este minimizat, n cazul controlului pasiv i activ, atunci cnd eroarea de
faz n msurarea forei este de 0
0
, -2
0
i +2
0
.
Rezult c, n acest caz, controlul activ nu este afectat de erorile de faz.
Fig. 5.27
n cazul unei grinzi simplu rezemate, eroarea de faz poate afecta rezultatul
cnd aciunea unei fore de-a lungul unei axe transversale este combinat cu aciunea
unui moment de rotaie aplicat asupra masei m
2
.
Erorile aleatoare de faz determinate de traductoare, vor muta suprafaa de
eroare a puterii transmise, atunci cnd partea real a forei de control este variat n
jurul valorii optimale.
Fig. 5.28
197
Din figura 5.28 rezult c puterea transmis este minimizat de aceeai for de
control, indiferent de eroarea de faz, obinndu-se un control maxim.
Cum toi traductorii produc erori de faz aleatoare, rezult c suprafaa de
eroare se va muta n continuare i deci va fi dificil pentru controlerul adaptiv s
convearg spre o soluie optim.
Din analiza rezultatelor teoretice rezult urmtoarele concluzii:
utilizarea unei fore de control egal cu ncrcarea sistemului superior arc-
amortizor, ne d o putere transmis la masa m
2
egal cu zero;
puterea transmis n sistemul mecanic poate fi redus la zero, n cazul unui
sistem multiplu de izolatori activi de vibraie, dac forele perturbatoare sunt
coliniare cu forele dezvoltate de actuatorii de control, ceea ce se poate realiza
practic;
erorile aleatoare de faz ale traductoarelor utilizate la msurarea puterii
transmise, determin o mutare a suprafeei de eroare a puterii transmise, ceea
ce face ca un controler adaptiv s nu poat converge uor spre o soluie optim.
5.9. Controlul activ al transmiterii puterii vibraiei ntr-o bar
5.9.1. Modelul teoretic
Pentru studiul transmiterii puterii vibraiei, s-a considerat un model teoretic
format dintr-o mas rigid, izolat activ de o bar simplu rezemat, asupra masei
acionnd o for vertical de excitaie i un moment de rotaie (fig. 5.29).
Fig. 5.29
Izolatorul activ este format dintr-un sistem de izolare pasiv (arc-amortizor) i
un element de izolare activ (actuator de control), care dezvolt o for de reaciune
de-a lungul axei verticale z.
Dac momentele de rotaie aplicate masei rigide sunt mici, valorile negative ale
puterii transmise de-a lungul axei verticale pot realiza o izolare pasiv a vibraiei.
n continuare sunt prezentate dou metode de control adaptiv al puterii
transmise a vibraiilor, atunci cnd putem neglija puterea vibraiei, datorat
momentelor de rotaie.
198
Pentru calculul izolrii active se determin o for de control optim, dup care
se demonstreaz c aceast soluie reduce la zero puterea vibraiei transmis la bar.
Excitaia Q
o
a unui corp rigid se poate considera, n general, sub forma unui
vector cu 6 dimensiuni:
T
o x y z x y z
Q [F F F M M M ] = (5.38)
unde F i M sunt forele i momentele dup trei direcii rectangulare.
Arcul va aciona asupra fiecrei mase cu o for egal i de semn contrar:
b b t
t
Q Q K(D D ) = = (5.39)
unde Q
t
, Q
b
, D
t
, D
b
sunt vectorii for i deplasare a masei superioare i respectiv
inferioare iar K este matricea diagonal complex de rigiditate a izolatorului, care
poate fi exprimat sub forma:
i i
k (1 j ) + , unde: i = 1,...,6, este fraciunea de
amortizare, iar j 1 = . Deplasarea masei superioare este dat de:
t t T
0
D [R ] D = (5.40)
D
0
este vectorul deplasare complex al centrului de mas al masei superioare,
definit sub forma:
T
0 0 0 0 x0 y0 z0
D x y z =
(5.41)
unde x
0
, y
0
, z
0
reprezint cele 3 deplasri liniare, iar
x0
,
y0
,
z0
sunt deplasrile
unghiulare, iar
t T
[R ] este transpusa matricei de legtur ntre momente i deplasrile
transversale, care este definit sub forma:
t
t t
t t
t t
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
R
0 z y 1 0 0
z 0 x 0 1 0
y x 0 0 0 1
=
(5.42)
unde (x
t
, z
t
, z
t
) este punctul unde corpul rigid este conectat la izolator.
Pentru o descriere precis a comportrii dinamice a barei, trebuie incluse n
model un numr suficient de moduri proprii de vibraii. Deplasarea barei se poate
determina ca o sum a modurilor proprii de vibraii (1, ..., p), fiind dat de relaia:
b b T
p
D [R ] w = (5.43)
unde
b T
[R ] este transpusa funciilor modale a fiecrui grad de libertate, fiind definit
de relaia (5.44), iar w
p
este amplitudinea complex modal, dat de relaia (5.45).
199
b b b
b b b b b
b b b
b
b b b b b
b b b
b b b b b
h x x x
cos( ) 0 sin( ) 0 cos( ) 0
2L L L L L
h 2 x 2 x 2 2 x
cos( ) 0 sin( ) 0 cos( ) 0
2L L L L L R
2P P x P x P P x
cos( ) 0 sin( ) 0 cos( ) 0
L L L L L
=
M M M M M M
(5.44)
T
p 1 2 P
w [w , w ,..., w ] = (5.45)
Ecuaiile de micare ale masei rigide i ale barei sunt:
b b b
p p c
Z w R Q R Q = (5.46)
t t t
0 0 0 c
Z D Q R Q R Q = + (5.47)
unde Z
0
este impedana barei dat de relaia:
0
0
0 2
0
x
y
z
m 0 0 0 0 0
0 m 0 0 0 0
0 0 m 0 0 0
Z
0 0 0 I 0 0
0 0 0 0 I 0
0 0 0 0 0 I
=
(5.48)
unde m
o
este masa corpului rigid, I
x
, I
y
, I
z
sunt momentele de inerie ale centrului de
greutate, iar este pulsaia forei perturbatoare.
Z
p
este impedana barei definit ca:
1 11 12 1p
21 2 22 2p
p
p1 p2 p pp
x C C C
C x C C
Z
C C x C
=
L
L
M M O M
L
(5.49)
unde contribuia modului de vibraie de ordinul i este dat de:
2 2 2
I I I I I
x m ( j ) = + (5.50)
I b
1
m SL
2
= (5.51)
2 2
b
I 2
b
I EI
L S
(rad/sec) (5.52)
iar ineria montajului inferior al sistemului este luat n calcul prin termenul:
b 2
I ',I
b b
I x I' x
C m sin sin
L L
= (5.53)
200
Vectorul for de control a izolatorului activ de vibraii este dat de:
c c c c c c T
c x y z x y z
Q [F F F M M M ] = (5.54)
unde indicele superior c reprezint actuatorul de control.
Ecuaiile (C.9) i (C.10) pot fi exprimate compact sub form matriceal astfel:
t c
0 11 12 0
b c
p 21 22
D A A Q R Q
w A A R Q
+
=
(5.55)
unde coeficienii matricei A sunt:
t t T
11 0
A Z R K[R ] = + (5.56)
t b T
12
A R K[R ] = (5.57)
b t T
21
A R K[R ] = (5.58)
b b T
22 p
A Z R K[R ] = + (5.59)
Puterea transmis n bar este definit de relaia:
b H b
c
Puterea {[D ] (Q Q )}
2
= + (5.60)
unde (x) este partea imaginar a expresiei din parantez. Putem converti ecuaia
(5.60) sub forma:
T T T i
c c c c
Puterea {[q ] q [q ] [ ] q c }
2
= + + + (5.61)
unde:
i i T r r T
T
r r T i i T
a [a ] a [a ] 1
[ ]
2 a [a ] a [a ]
+
= =
+ +
(5.62)
i T i
2 1
r T r
2 1
[b ] b 1
2 [b ] b
+
=
(5.63)
unde q
c
este definit n ecuaia (4.29) iar matricele reale a
r
, a
i
, b
1
r
, ... reprezint partea
real, respectiv imaginar a matricelor complexe a, b
1
, b
2
i d. Exponentul T
reprezint transpusa matricei, iar matricele complexe sunt:
1 2 1
a G KG G = (5.64)
1 1 3
b G KG = (5.65)
2 4 2 4
b G KG G = (5.66)
4 3
d G KG = (5.67)
unde:
t T H b b T H b
1 21 22
G (R ) B R (R ) B R = (5.68)
t T t t T b b T t b T b
2 11 12 21 22
G (R ) B R (R ) B R (R ) B R (R ) B R = + (5.69)
t T b T
3 11 0 21 0
G (R ) B Q (R ) B Q = (5.70)
T H b
4 0 21
G Q B R = (5.71)
unde termenii B sunt dai de urmtoarele ecuaii:
11 1 1
11 12 22 21
B {A A A A }
= (5.72)
201
11 1 1
22 22 21 12
B {A A A A }
= (5.73)
1 1 1
12 11 12 22 21 11 12
B A A {A A A A }
= (5.74)
1 21 1 1
21 22 11 12 22 21
B A A {A A A A }
= (5.75)
Minimul ecuaiei quadrice pentru putere este dat de ecuaia:
T 1
Puterea
2
= (5.76)
Dac presupunem c actuatorul de control produce o for egal i opus ca
sens forei elastice i rezistente din elementele izolatorului (arc-amortizor), obinem:
b t
c
Q k(D D ) = (5.78)
unde D
t
i D
b
sunt vectorii deplasare la captul superior i inferior al izolatorului, Q
t
i Q
b
sunt vectorii for care acioneaz la capetele izolatorului, Q
c
este vectorul forei
de control activ, iar k este matricea de rigiditate a izolatorului.
n cazul ideal, actuatorul de control trebuie s furnizeze fore i momente de
rotaie necesare, pentru toate axele de vibraie.
n cazul acestui model, vom presupune c ncrcarea primar a masei rigide,
este format dintr-o singur for vertical, care nu genereaz moment de rotaie.
Substituind ecuaia (5.1) n matricele care descriu micarea barei i a corpului
rigid, rezult:
0 0
p p
Z 0 D Q
0 Z w 0
=
(5.79)
Rezult c, dinamic, sistemul bar-izolator este decuplat, deci matricea
amplitudinilor modale w
p
este zero i puterea vibraiei nu este transmis barei.
5.9.2. Identificarea sistemului
Rspunsul sistemului este determinat prin msurarea coeficienilor de influen
pentru fora de control primar i secundar.
Toate forele de control n
c
i toate forele primare n
p
au valoarea zero, cu
excepia unei singure fore primare considerat egal cu unitatea. Deplasarea i fora
sunt msurate de senzorii de eroare, n domeniul de frecven analizat. Acest proces
este repetat pentru fiecare for primar i for de control. Deplasarea i fora,
msurate de traductorii de eroare sunt efectiv funcii de transfer ntre fora
perturbatoare i deplasare, ntre fora perturbatoare i fora la traductorii de eroare,
ntruct s-a considerat o ncrcare unitar a structurii elastice. Aceste funcii de
transfer pot fi folosite pentru determinarea forelor de control optime.
5.9.3. Determinarea forelor de control optime
Deplasarea i fora msurate de traductorii de eroare pot fi descrise de vectorii
d
t
i f
t
, care au lungimea n
e
, fiind dai de:
202
t dp p dc c
d Z f Z f = + (5.71)
t fp p fc c
f Z f Z f = + (5.72)
unde f
p
i f
c
sunt vectorii coloan a forei primare, respectiv a forei de control, de
lungime n
p
i n
c
; Z
ij
este o funcie de transfer ntre deplasare i for (indicele i
reprezint fora primar, iar j reprezint fora de control).
De exemplu, Z
fc
este o matrice de dimensiune (n
e
. n
c
), care face transferul ntre
fora msurat la traductorii de eroare i fora de control.
Aceste definiii pot fi utilizate pentru definirea puterii medii a vibraiei
transmise ntr-o structur, astfel:
H
t t
Puterea Im(d f )
2
= (5.73)
unde exponentul H reprezint transpusa, iar este viteza unghiular n rad/s.
nlocuind ecuaiile (5.71) i (5.72) n ecuaia (5.73) se obine puterea transmis
n funcie de fora de control q
c
:
H H H i
c c c c
Puterea (q q q q d )
2
= + + + (5.74)
unde:
r
c
c
i
c
f
q
f
=
(5.75)
i i T r r T
T
r r T i i T
a (a ) a (a ) 1
2 a (a ) a (a )
+
= =
+ +
(5.76)
i T i
2 1
r T r
2 1
(b ) b 1
2 (b ) b
+
=
(5.77)
unde matricele reale
r
c
f ,
i
c
f ,
r
a ,
i
a ,
r
b ,... reprezint prile reale respectiv imaginare
ale matricelor complexe f
c
, a, b
1
i b
2
, iar constanta complex c este definit ca:
H
dc fc
a Z Z = (5.78)
H
1 dc fp p
b Z Z f = (5.79)
H H
2 p dp fc
b f Z Z = (5.80)
H H
p dp fp p
c f Z Z f = (5.81)
Transmiterea puterii ntr-un sistem elastic, n cazul unei izolri pasive a
vibraiei (
[ ]
T
c
q 0, 0 = ) este dat de
i
c 2 . Minimul ecuaiei (5.73) este dat de:
T 1 i
min
Puterea ( c )
2
= + (5.82)
ceea ce corespunde unui vector al forei optime de control, dat de relaia:
1
c optimal
(q )
= (5.83)
203
5.9.4. Izolarea pasiv pentru o excitaie simultan for i moment
Momentul de rotaie apare n cazul n care fora primar este decalat fa de
centrul de greutate al masei rigide. Dac fora primar creeaz i moment de rotaie,
atunci puterea total (P
t
) a vibraiei este format din puterea (P
f
) dat de forele
primare i viteza de translaie i puterea (P
m
) dat de momentele de rotaie i vitezele
unghiulare.
t f m
P P P = + (5.84)
Plecnd de la principiul conservrii energiei, puterea transmis trebuie s fie
mai mare ca zero (P
t
> 0), att timp ct puterea este absorbit, valori negative ale
puterii transmise de-a lungul axei z (P
f
< 0) apar atunci cnd puterea creat de
momentele de rotaie (P
m
) este mai mare dect mrimea puterii transmise de forele
verticale de translaie (
m f
P P 0 > > ).
Valori negative ale puterii transmise de-a lungul unei axe pot s apar atunci
cnd o conversie a unei unde elastice are loc n condiiile limit ale structurii.
Dac vom considera o bar semi-infinit neamortizat, simplu rezemat la un capt,
atunci o und elastic care se propag spre captul rezemat va fi reflectat napoi.
Reazemul simplu va restriciona deplasarea barei pe axa vertical z, dar va
permite rotaia liber n jurul axei Oy. Dac unda incident este generat prin
aplicarea unei fore verticale asupra barei, unda se va propaga de-a lungul barei spre
reazem. Deplasarea barei se va face n principal pe axa z i numai o mic rotaie n
jurul axei Oy. Cnd unda ajunge n reazem, va fi generat o for de reacie, iar unda
reflectat se va propaga n lungul barei, producnd o deplasare mai mare pe axa z,
fr s se realizeze o conversie a undei.
Dac vom aplica barei un moment de rotaie, unda generat de acesta se va
propaga n lungul barei, spre reazem, producnd n principal o rotaie a barei n jurul
axei Oy, fr s genereze un moment de reacie. Energia undei incidente se conserv
n energia unei unde reflectate care genereaz o deplasare pe axa z.
Acest mecanism de conversie a tipurilor de und determin o nsumare a
puterilor incidente pe axa z i a puterilor reflectate, rezultnd valori negative ale
puterii transmise de-a lungul axei z a izolatorului activ.
n cazul unei excitaii prin for pe direcia vertical z, puterea transmis n
bar are valori pozitive. Funcia cost determinat pe baza puterii transmise este
ntotdeauna pozitiv, i are o soluie global unic pentru fora de control, deci
actuatorul de control poate anula complet vibraia.
Dac vom aplica peste fora primar vertical i un moment de rotaie, este
posibil s apar valori negative ale puterii transmise pe axa vertical, deci funcia cost
nu va fi ntotdeauna pozitiv. n continuare, vom compara o serie de funcii cost,
pentru a stabili eficiena reducerii puterii totale a vibraiei transmis n bar.
Cei mai muli cercettori folosesc o funcie cost bazat pe ptratul acceleraiei,
ntruct accelerometrele pot fi ataate uor pe structura receptoare, genernd n
acelai timp un semnal potrivit pentru utilizarea unui algoritm FX-LMS.
204
Suprafeele de eroare ale funciilor cost bazate pe ptratul acceleraiei sau
ptratul forei, la baza izolatorului, sunt definite pozitiv i au un minim global unic.
Algoritmii cu gradient pant, cum este i algoritmul FX-LMS, vor converge
spre acest minim global. n figura 5.30 este prezentat puterea total transmis n bar
pentru izolare pasiv la o for de ncrcare F
t
=1N i un moment de rotaie M
y
=
0.005N.m i pentru cinci cazuri de izolare activ, care au un minim global unic.
Fig. 5.30
Cele cinci cazuri sunt: minimizarea ptratului acceleraiei de-a lungul axei z,
suma dintre ptratul acceleraiei pe axa z i ptratul acceleraiei de rotaie n jurul
axei Oy, ptratul forei de-a lungul axei z, suma dintre ptratul forei pe axa z i
ptratul momentului de rotaie n jurul axei y i puterea total transmis de-a lungul
axelor y i z.
La 35 Hz exist o rezonan de rotaie, care nu poate fi controlat
corespunztor de actuatorul de control, care este orientat de-a lungul axei verticale z.
Este de ateptat, ca la aceast frecven, izolarea vibraiei s fie ineficient, dar
controlul activ nu ar trebui s aib un efect negativ, n raport cu controlul pasiv.
Acest lucru se ntmpl deoarece o parte a puterii vibraiei pe axa z, poate fi
folosit pentru anularea puterii vibraiilor de rotaie n jurul axei y.
Minimizarea ptratului acceleraiei sau ptratului forei pe axa vertical z,
reduce la zero puterea transmis pe axa z anulnd efectul de reducere a puterii
micrii de rotaie n jurul axei Y.
O mbuntire a izolrii vibraiei poate fi obinut prin minimizarea sumei
ptratului acceleraiilor pe axa z i n jurul axei y.
Dac funcia cost este suma ptratelor acceleraiilor de-a lungul axei z i n
jurul axei y, atunci valoarea funciei cost pentru izolarea activ, este ntotdeauna mai
mic dect cea obinut pentru izolarea pasiv (fig. 5.31)
Performana izolrii active a vibraiei, prin utilizarea unei funcii cost ca sum
a ptratelor acceleraiilor pe axa vertical z i n jurul axei de rotaie y, este mult mai
sczut fa de utilizarea funciei cost ca sum a ptratelor acceleraiilor pe axa z, cu
excepia frecvenei de rezonan a micrii de rotaie n jurul axei y, cu riscul de a
mri vibraia de translaie pe axa vertical.
205
Fig. 5.31
Acest lucru determin o mrire a puterii totale transmise, n comparaie cu
cazul n care este minimizat ptratul acceleraiei pe axa z. Cnd minimizm ptratul
acceleraiei pe axa z, atunci puterea transmis i acceleraia pe axa z, este redus la
zero, ceea ce face ca puterea total transmis n bar s fie determinat numai de
puterea transmis prin micarea de rotaie, n jurul axei y.
Minimizarea puterii transmise pe axa vertical este o alegere nepotrivit pentru
funcia cost, cnd avem momente de rotaie, ntruct, acestea pot determina o cretere
pe ansamblu a puterii transmise, mai mare dect n cazul izolrii pasive.
Se poate arta c atunci cnd amortizarea sistemului receptor crete, erorile de
faz n msurarea puterii nu afecteaz minimizarea puterii transmise.
Msurarea practic a puterii transmise necesit ca unghiul de faz a semnalului
generat de traductorii de for i vitez s fie acelai. Precizia de faz tipic pentru
traductorii de for i accelerometrele Bruel&Kjaer este mai mare de 0.5
o
.
Erorile de faz n msurarea puterii transmise pot reduce performanele izolrii
active, atunci cnd utilizm puterea transmis ca funcie cost pentru a fi minimizat.
Performana izolrii active nu este compromis de erorile de faz dac utilizm
funciile cost bazate pe ptratul acceleraiei sau ptratul forei.
Fig. 5.32.
206
n fig. 5.32 se compar puterea total transmis n bar atunci cnd utilizm un
traductor de putere ideal, pentru minimizarea puterii totale transmis n bar i
respectiv pentru un traductor de putere cu o eroare de faz 0.5
o
. Rezult c
performana izolrii active este mai sczut dect izolarea pasiv, pentru frecvenele
la care apar rezonanele vibraiilor torsionale, atunci cnd cresc erorile de faz.
La alte frecvene, eroarea de faz are un efect negativ neglijabil, asupra
performanelor izolatorului.
5.10. Controlul activ al vibraiilor generate de angrenaje, modulate n
amplitudine i/sau frecven
5.10.1.Consideraii generale
Controlul activ al vibraiilor modulate n amplitudine i/sau frecven a fost
realizat n scopul atenurii vibraiilor i zgomotului angrenajelor.
Testele pentru modulaii n amplitudine i frecven au fost realizate n band
ngust, cu sau fr rezonan, cu ajutorul unui dispozitiv de control cu o intrare i o
ieire folosind un filtru adaptiv FIR (finite - impulse - response).
Studiile teoretice au urmrit optimizarea amplasrii actuatorilor i a
traductorilor n cazul unui arbore de susinere a roilor dinate, supus unei perturbaii.
Rezultatele experimentele au demonstrat eficiena controlului activ al
vibraiilor modulate.
Vibraiile generate n funcionare de transmisiile prin roi dinate, pot fi
modulate n amplitudine i/sau frecven, datorit fluctuaiilor n ncrcarea dinilor i
a variaiei vitezei unghiulare a roilor dinate. Cele dou modulaii genereaz n jurul
frecvenelor de angrenare i a armonicilor acestora benzi laterale de frecven,
determinnd o cretere a nivelului de zgomot.
Spectrul de frecven al vibraiilor generate de main are energia distribuit,
n principal, la un numr de componente armonice. n sistemele cu roi dinate,
cercetrile au evideniat un fenomen de modulaie a forei de angrenare n
amplitudine i/sau n frecven, ct i combinaia acestor modulri. Procesul de
modulaie produce vibraii cu amplitudine mare n benzile laterale ale frecvenelor de
angrenare i armonicelor acestora.
Zgomotul corespunztor vibraiei n benzile laterale ale frecvenelor, poate
avea o influen semnificativ asupra nivelului global al zgomotului generat de
procesul de angrenare i n special asupra percepiei acestuia.
n scopul stabilirii fezabilitii controlului activ al perturbaiilor produse de
fenomenul de modulaie, n comportarea vibratorie a unei structuri rezonante simple,
au fost realizate cercetri teoretice i experimentale pe un sistem simplu format dintr-
o bar de susinere. n literatura de specialitate sunt prezentate lucrri de control activ
al vibraiilor i sunetului armonic, implicnd i turbulene n band larg.
Cteva lucrri au abordat i studii legate de perturbaiile periodice multi -
frecven realiznd o comparaie a diferitelor metode de control pentru anularea
distorsiunilor n band ngust. n continuare sunt prezentate cercetrile realizate n
207
scopul stabilirii posibilitilor de realizare a controlului adaptiv feedforward, cu o
singur intrare i o ieire (SISO), pentru reducerea vibraiilor transversale al unei bare
simplu rezemate, excitat de fore perturbatoare periodice, modulate n amplitudine i
frecven. Pentru a genera fora de control necesar a fost utilizat un filtru digital FIR
pentru filtrarea semnalului de referin, corelat cu turbulena vibratorie.
Coeficienii filtrului digital au fost ajustai cu ajutorul algoritmului LMS pentru
a micora rspunsul grinzii, folosind un accelerometru ca detector de eroare.
Fig. 5.33.
n figura 5.33 este prezentat diagrama bloc a sistemului de control
feedforward, unde semnalul de referin feedforward f (m) i semnalul perturbator
( ) d m au fost considerate asemntoare. Ca rezultat al funciei de transfer ( ) C z
dintre ieirile filtrului FIR i al traductorului de eroare ( ) e m , semnalul de referin
trebuie s fie prefiltrat de o funcie de transfer ( )
C z , nainte de a fi folosit n
algoritmul adaptiv, pentru a preveni instabilitatea. Rezultatul prefiltrrii l reprezint
semnalul filtrat ( )
f
f m . Funcia de transfer a fost modelat de un filtru FIR cu 25 poli
i zero, pentru care coeficienii au fost determinai off-line, nainte de a ncepe
controlul.
Semnalele perturbatoare au fost modulate sinusoidal n amplitudine sau
frecven, funciile de modulare fiind de asemenea sinusoidale. Semnalul modulat n
amplitudine F
AM
(t) este dat de relaia:
( )
AM c 0 m
F Asin( t) 1 m sin t = + = (
( ) ( ) ( )
{ }
c 0 c m
=A sin( t) m / 2 sin t / 2 ( +
(5.85)
unde
c
i
m
sunt frecvenele unghiulare de transport i modulaie, iar A este
amplitudinea de transport, m
o
este adncimea de modulaie, amndou fiind
considerate egale cu unitatea.
Semnalul reprezentat de ecuaia (5.85) poate fi exprimat ca sum a 3 semnale,
un semnal de transport i dou benzi laterale, una nalt i una joas (
c
m
).
n fig. 5.34 este dat spectrul semnalelor perturbatoare modulate n amplitudine (AM)
i n frecven (cu A = 1 i 1 m
0
= n ecuaia 5.85), iar in figura 5.35 este dat spectrul
208
Fig. 5.34
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
p
FM c m m 0 m c p m
p 1
p
c m c m
F t Acos t sin t A{J cos t 1 J
cos p t 1 cos p t
=
= + = + (
(
+ +
(5.86)
Fig. 5.35.
semnalelor perturbatoare modulate n amplitudine i n frecven (cu A = 1 i
m
2 = ), unde
m
este indexul de modulaie sau deviaia maxim de faz iar ( )
p m
J
este funcia Bessel de primul tip, ordinul p i argument
m
. Ecuaia (5.86) arat c
semnalele FM conin o component de transport i un numr infinit de benzi laterale
la frecvenele ( )
c m
p . Amplitudinea componentei de transport i a benzilor
laterale depinde de funcia Bessel apropiat. S-a folosit un index de modulaie
m
2 = i amplitudinea A = 1.
209
5.10.2. Cercetri teoretice
Studiile teoretice i simulrile pe calculator au urmrit stabilirea poziiei
optime a traductorului i a actuatorului, precum i determinarea ordinului filtrului
FIR. n fig. 5.36 este prezentat schematic poziia sursei perturbatoare
d
x , a sursei de
control
c
x i a accelerometrului de eroare
a
x , de-a lungul barei simplu rezemate, de
lungime L. Sursa perturbatoare a fost poziionat lng reazemul grinzii (
d
x =0,785 l),
pentru a excita un numr mare de moduri proprii de vibraii.
Poziiile sursei de control i a traductorului de erori (
c a
x 0, 75l, x 0,125l = = )
au fost alese pe baza unui studiu semianalitic, descris n continuare, n aa fel nct s
poat atenua vibraiile armonice, pe o poriune mai mare a grinzii, la frecvene pn
la 800 Hz, nu numai n dreptul traductorului de erori. Banda de frecven de 800 Hz,
include primele trei frecvene proprii ale grinzii (77, 308 i 123 Hz).
Funcia cost a fost definit ca valoare medie spaial a amplitudinii variaiei
acceleraiei y(x, t) && , de-a lungul grinzii de lungime L, la o perturbaie armonic
primar i este o funcie ptratic a amplitudinii i fazei sursei de control secundare i
a sursei primare, avnd un singur minim.
Fig. 5.36.
( )
x
2
L
0
2
t , x y dx ) t , x ( y
L
1
& & & & =
|
.
|
\
|
=
(5.87)
Pentru o perturbaie armonic
t j
d d
e F ) t ( F
= la
d
x x = , unde
d
F este fora i
este frecvena perturbaiei, rspunsul la schimbarea strii normale a grinzii se obine
ca o sum a modurilor proprii de vibraii:
( ) ( )
( )
+
=
1 n
t j
d
n n
2 2
n
d n n
b
d
e F
2 j
x x
m
1
) t , x ( y (5.88)
unde
n
reprezint modul propriu de vibraii la frecvena proprie
n
, iar
n
este
fraciunea de amortizare critic, corespunztoare modului propriu de vibraie de
ordinul n, iar m
b
este masa barei.
De asemenea, fora de control ( )
t j
c c
e F t F
= va da la
c
x x = urmtorul rspuns:
( ) ( )
( )
+
=
1 n
t j
c
n n
2 2
n
c n n
c
e F
2 j
x x
m
1
) t , x ( y (5.89)
Ca rspuns la deplasarea barei i a semnalului de intrare de control avem:
210
( ) ( ) ( )
( )
( )
( ) ( ) | |
( )
=
= +
+
= + =
1 n
t j
n n
1 n
c n c d n d
n n
2 2
n
t j
n
c d
e x a
x F x F
2 j
e x
m
1
t , x y t , x y t , x y
(5.90)
unde coeficienii sunt dai de ecuaia:
( ) ( )
( )
c cn dn
n n
2 2
n
x n d n d
n
F a a
2 j
x F x F
m
1
a + =
+
+
= (5.91)
Pentru o vibraie armonic, funcia cost definit de ecuaia (5.87) poate fi
exprimat ca:
( ) ( ) ( )
=
L
0
4
dx t , x y t , x y
L
(5.92)
Substituind ecuaia (5.90) n ecuaia (5.92), obinem:
( ) ( ) ( )
=
=
(
=
1 n
2
n
4
1 m
m m
L
0
1 n
n n
4
a dx x a x a
L
(5.93)
unde asterixul indic conjugarea complex care a fost fcut considernd proprietatea
de ortogonalitate modal, definit de relaia:
( ) ( )
mn
L
0
n m
dx x x
L
1
=
(5.94)
unde
mn
este operatorul Kronecker care este egal cu 1, pentru m = n i
mn
= 0 pentru
m n.
Cu ecuaia (5.92) funcia cost din ecuaia (5.94) poate fi exprimat ca funcie
ptratic a lui
c
F n concordan cu relaia:
( ) ( )( )
(
(
+ |
.
|
\
|
+ |
.
|
\
|
+
|
|
.
|
\
|
=
+ + = + =
=
1 n
2
dn c dn
1 n
cn dn
1 n
cn c c
2
1 n
cn c
4
1 n
c cn dn c cn dn
4
2
1 n
c cn dn
4
a F a a a a F F a F
F a a F a a F a a
(5.95)
Fora de control
c
F care minimizeaz funcia cost n ecuaia (5.95) este dat de:
( )
=
1 n
2
cn
dn
1 n
cn
opt c
a
a a
F (5.96)
i produce o funcie cost minim
min
dat de:
(
(
(
(
(
|
|
|
|
|
.
|
\
|
=
=
2
1 n
cn
2
1 n
dn cn 2
1 n
dn
4
min
a
a a
a (5.97)
211
Expresia din ecuaia (5.97) a fost evaluat la diferite frecvene, pentru o poziie
dat a actuatorului pentru a determina atenuarea maxim de-a lungul grinzii, pentru a
gsi poziia convenabil a actuatorului. Cel mai eficient control poate fi obinut prin
poziionarea n acelai loc a surselor de control i perturbaie.
n acest caz, sursa de control optim ar avea aceeai amplitudine ca perturbaia
i o diferen de faz de 180, reprezentnd
d c
F F = , iar minimul funciei cost n
ecuaia (5.97) ar fi zero pentru toate frecvenele.
Actuatorul de control a fost poziionat la x = 0,125 L, astfel ca perturbaia i
controlul s fie simetrice fa de centrul barei. Pentru toate modurile de vibraii a fost
considerat acelai raport de amortizare modal 01 , 0
n
= . Pentru aceast poziie a
actuatorului au fost controlate numai rezonanele, n timp ce anti-rezonanele au fost
influenate nesemnificativ. Acest rezultat s-a produs pentru c la rezonan, rspunsul
grinzii a fost dominat de un singur mod de vibraii i aciunea de control a redus
aceast contribuie pn cnd modurile reziduale au devenit importante.
ntre rezonane, un numr mare de moduri au contribuit la rspuns i atta
timp ct excitaia modal a determinat perturbaia i sursele de control au fost n faza
pentru modurile impare i defazate pentru modurile pare, s-a realizat un control
redus, deoarece aciunea de control a micorat amplitudinea modurilor impare i a
mrit amplitudinea modurilor pare i invers.
n figura 5.37, curba continu a fost obinut prin plasarea actuatorului de
control la x = 0,75 L, iar accelerometrul la L 5 , 0 x x
a
= = .
Atenuarea la toate frecvenele a fost posibil pn la frecvena de 800 Hz i a
inclus primele trei rezonane, rezultnd reducerea efectului controlului pe msura
apropierii de armonica a patra.
Fig. 5.37
Controlul s-a fcut la antirezonan la fel de bine ca i la rezonan, pentru
frecvene mai mici de 800 Hz, pentru c sursa de control a fost relativ protejat la
perturbaie i putem avea la primele trei moduri aceeai faz cu perturbaia.
212
La frecvene mai mari dect a patra frecven proprie, actuatorul ar putea doar
s controleze rezonana, dei actuatorul nu a fost pe un nod al acestui mod propriu.
n general, cu ct sursa de control e mai aproape de sursa perturbatoare, cu att
domeniul de frecven n care controlul este mai eficient este mai mare.
Dac controlul i perturbaia acioneaz n acelai loc, domeniul de frecven
controlat este teoretic infinit.
5.10.3. Poziionarea traductorului
Analizele realizate au oferit o metod de poziionare a actuatorului n aa fel ca
acceleraia global a grinzii s fie minim. Pentru implementarea unui dispozitiv de
control care s minimizeze funcia cost se impune msurarea acceleraiei pe toat
lungimea grinzii, ceea ce este practic imposibil. Pentru a rezolva aceast problem, a
fost utilizat un traductor pentru msurarea acceleraiei ntr-un punct poziionat pe
bar n aa fel nct minimizarea semnalului de ieire a traductorului s conduc la o
minimizare optim a lui . Rspunsul dat de ecuaia (5.97) poate fi egalat cu zero, la
a
x x = , obinnd fora de control:
( ) ( )
( ) ( )
d
1 n
c n a n n
1 n
d n a n n
c
F
x x A
x x A
F
(
(
(
(
=
(5.98)
unde coeficienii funciei amplitudine se obin cu ecuaia:
( ) +
=
n n
2 2
n b
n
2 j
1
m
1
A (5.99)
Pentru o perturbaie armonic, prin minimizarea deplasrii vitezei sau
acceleraiei se obin rezultate identice. Dup determinarea forei de control
c
F din
ecuaia (5.98), aceasta poate fi nlocuit n funcia cost din ecuaia (5.96) pentru a
determina dac aceast minimizare local va produce i o atenuare global.
n figura 5.38 este dat funcia cost cu actuatorul de control la
L 75 , 0 x x
c
= = i accelerometrul montat la L 125 , 0 x x
a
= = .
Rezult c minimizarea rspunsului traductorului de acceleraie la x
a
= 0,125 L
produce un rezultat similar cu minimizarea funciei cost, ntruct n acest caz,
traductorul este poziionat aproape de captul grinzii, unde poate observa mai multe
moduri de vibraii. Configuraia actuatorului i traductorului prezentat n figura 5.36
a fost folosit i n simulrile pe calculator i experimentele realizate pentru controlul
vibraiei la toate frecvenele pn la aproximativ 800 Hz. Pentru controlul vibraiilor
modulate cu benzi laterale de frecven este necesar s fie controlate perturbaiile la
rezonan ct i la celelalte frecvene.
213
5.11. Controlul activ al vibraiilor la angrenaje cu ajutorul unei
configurri speciale a traductorilor i a actuatorilor
5.11.1.Modelul teoretic pentru determinarea forelor secundare de control
Angrenajele au o pondere mare n structura mainilor, fiind n acelai timp
surse importante de vibraii i zgomot. Controlul pasiv al vibraiilor generate de
angrenaje este dificil i din aceste motive au fost implementate de curnd o serie de
metode de control activ.
Pentru a atenua vibraiile angrenajului, sunt generate fore secundare de trei
actuatori fixai pe angrenaj. Fora secundar echivalent este calculat prin
liniarizarea modelului dinamic al angrenajului.
Cercetrile experimentale au urmrit realizarea controlului activ al vibraiilor
unui angrenaj cu ajutorul a 3 actuatori magnetorestricitivi plasai direct pe roi i trei
accelerometre care msoar acceleraia unghiular a angrenajului, informaie
procesat de sistemul de control feedforward.
n continuare este prezentat un sistem de control pentru reducerea vibraiilor
unui angrenaj (fig. 5.38.), determinate de variaia rigiditii dinilor n angrenare.
Modelul dinamic al angrenajului creat permite determinarea forei secundare
necesar pentru a atenua vibraiile roilor dinate. De asemenea, se propune o schem
de configurare posibil a actuatorilor i traductorilor, pentru care sunt date i cteva
rezultate experimentale. Presupunnd c momentele de torsiune ( )
1
M i ( )
2
M
sunt funcii de , atunci ecuaiile difereniale de micare pentru roata conductoare i
cea condus se obin scriind ecuaia de echilibru a momentelor fa de axa de rotaie:
1 1
'
1 1 n 1
J M cos R F M = & & (5.100)
2 2
'
2 2 2 n
J M M cos R F = + & & (5.101)
unde
n
F este fora normal de contact dintre dinii angrenai,
2 1
R , R sunt razele
cercurilor de rostogolire,
'
2
'
1
M , M sunt momente de torsiune determinate de frecare,
este unghiul de presiune, iar
2 1
J , J sunt momentele de inerie.
n ecuaiile (5.100) i (5.101), ( )
1
M i ( )
2
M pot fi reprezentate ca produsul:
=
=
cos R F M
cos R F M
2 n 2
1 n 1
unde: ( ) + =
n n n
F F F
n care:
n
F este valoarea medie a forei din angrenare, iar ( )
n
F este componenta
variabil n timp, de-a lungul liniei de angrenare.
Rezult c deplasarea relativ dintre roata condus i cea conductoare, de-a
lungul liniei de angrenare, este dat de relaia: ( ) = cos R R x
2 2 1 1
Combinnd ecuaiile (5.100) i (5.101) obinem:
0
F cos ) , x ( ' F x ' c x = + + & & & (5.102)
214
Fig. 5.38
n care:
|
|
.
|
\
|
+ = cos
J
R M
J
R M
x ' c
2
2
'
2
1
1
'
1
&
( ) ( ) ( )
|
|
.
|
\
|
+ =
2
2
2
2
1
2
1
n n
cos
J
R
J
R
F F , x ' F
|
|
.
|
\
|
+ =
2
2
2
2
1
2
1
n n
cos
J
R
J
R
F F
Fora de contact dintre dinii angrenai poate fi determinat prin:
( )( ) + = cos x x cos a 1 k ) , x ( F
0
(5.103)
unde k este valoarea constant a rigiditii, a este valoarea maxim a raportului
rigiditii, iar
0
x este abaterea maxim de la deplasarea relativ proiectat.
Substituind ecuaia (5.103) n (5.102) i considernd o funcie periodic pentru
excitaie i rigiditate de forma:
( ) = cos x ' e
0
( ) | | ( ) | | ( ) + = + = cos a 1 k 2 t ' k t ' k
obinem: ( ) ( ) ( ) ( ) + + = + + ' e ' K F F t x ' k x ' c x
n n
& & & (5.104)
n care:
2
2
2
1
2
1
J
R
J
R
+ =
Ecuaia (5.104) poate fi rescris folosind diferite notaii, prin nmulirea cu
masa echivalent a roilor:
( )
2 1
2 1
m m 2
m m 1
m
+
=
=
Ecuaia rezultat reprezint sistemul oscilant liniar, a crui schem este
prezentat n fig. 5.39.
215
Fig. 5.39
Aceasta simplific modelul de angrenare a dou roi, la un sistem liniar cu un
singur grad de libertate, a crui ecuaie poate fi scris sub forma:
( ) ( ) ( ) ( ) ( ) + + = + + e k F F t x k x c x m & & & (5.105)
unde x m& & reprezint fora de inerie, x c& este fora de amortizare, ( ) ( ) t x k este fora
elastic datorat rigiditii dinilor n contact, F este variaia n timp a sarcinii,
( ) ( ) e k este excitaia prin micare.
Masa m n ecuaia (5.105) este masa echivalent a roilor angrenate, rezultat
din modelul rotaional.
Pentru a investiga interaciunile dintre fore principale, excitaia prin micare i
fora elastic datorit rigiditii dinilor, ecuaia (5.105) poate fi scris:
( ) ( ) | | ( ) ( ) ( ) | | ( ) + + + = + + + 1 f f 1 2
a
& & &
(5.106)
n care ( )
E
x
= este coordonata adimensional a deplasrii, E este o deplasare
unitar, t
n
= este variabila n timp, este indicile de modulaie a rigiditii,
este variaia rigiditii, f este fora variabil n timp, este funcia de excitaie a
deplasrii. Variaia adimensional a rigiditii ( ) N a fost considerat de form
armonic:
( ) ( ) = N cos (5.107)
( ) 0 = (5.108)
( ) ( ) = N cos f N f
a
(5.109)
Ecuaia (5.106) poate fi scris n termenii excitaiei cvasistatice echivalente:
( ) | | { } ( ) ( ) | | { } ( ) | | + = + + + , f
1 1 2
& & &
(5.110)
unde ( ) , f
poate fi calculat sau msurat n condiii cvasistatice, considernd
viteza de rotaie a roilor 0 sau poate fi determinat din ecuaia (5.106) i
(5.107) considernd : 0 , 0 = =
& & &
( )
( )
( ) +
+
=
1
f f
, f
a
(5.111)
Funcia ( ) | |
1
1
+ este o funcie periodic n N care poate fi exprimat n
serie Fourier:
216
( ) | | ( )
= +
0 n
n
1
nN cos a N cos 1 (5.112)
n care n este indicele armonicii de angrenare, iar coeficienii
n
a sunt dai de relaiile:
K 1,2,3, n cu
1
1
2
a
1
1
a
n
2
2
n
2
0
=
|
|
.
|
\
|
=
=
(5.113)
Pentru a lua n considerare efectele ncrcrii variabile n timp a angrenajelor i
efectele variaiei rigiditii dinilor asupra armonicelor superioare ale frecvenei de
angrenare, se nlocuiesc termenii rigiditii n ecuaia (5.110) cu valoarea medie a
acestora i astfel se obine o ecuaie diferenial cu coeficieni constani:
( ) ( ) | | = + + , f
2
& & &
(5.114)
Ecuaia diferenial (5.114) aproximeaz ecuaia diferenial (5.110) obinut
pentru o excitaie parametric cu neglijarea considerrii instabilitii.
Rezult c ecuaia diferenial liniar este un model adecvat pentru studiul
vibraiilor torsionale ale angrenajelor.
n continuare se determin forele secundare pe care trebuie s le dezvolte
actuatorii montai pe roata dinat, pentru a anula vibraia armonic a acesteia.
Dac aceste fore sunt cunoscute, pot fi alei actuatorii potrivii.
Ecuaia (5.114) mpreun cu (5.107), (5.108), (5.109), (5.111), (5.112) i
(5.113) devine:
( ) ( ) ( ) ( )
=
+ = + +
0 n 0 n
n n
N cos nN cos a f nN cos a f 2
& & &
(5.115)
Ecuaia (5.115) mpreun cu (5.107), (5.108), (5.109), (5.111), (5.112) i
(5.113) devine:
( ) ( ) ( )
( ) ( ) | ( ) ( )| + +
+ + = + +
=
N 1 n cos N 1 n cos
2
a
f
N cos fa nN cos a f 2
1 n
n
0 n
0 n
& & &
(5.116)
Grupnd termenii, ecuaia (5.116) poate fi scris:
( ) ( ) = + +
=
nN cos C 2
0 n
n
& & &
(5.117)
unde coeficienii fiecrei armonici a frecvenei de angrenare din ecuaia (5.116) sunt
dai de: f
2
a
f a C
1
0 0
+ = (5.118)
f
2
a
a f a C
2
0 1 1
|
.
|
\
|
+ + = (5.119)
K 2,3,4, n , f
2
a
2
1 a
f a C
1 n n
n n
=
|
.
|
\
|
+
+ =
+
(5.120)
217
Forele secundare pentru controlul activ al vibraiilor, se determin din condiia
ca vibraia roilor dinate s fie nul, deci ecuaia (5.19) trebuie egalat cu zero i
rezult rata forei:
=
+
2 0
1
a a 2
a 2
f
f
(5.121)
Rezultatul obinut n ecuaia (5.121) arat c raportul dintre fora dezvoltat de
actuatori poziionat pe roat i fora de angrenare este indicele de modulaie a
rigiditii obinut n cazul n care nu exist excitaie prin micare n timpul
angrenrii roilor dinate.
La prima vedere, aceast concluzie pare s limiteze aplicaiile schemei de
control propuse pentru controlul activ al vibraiilor roii dinate.
Pentru a mri rata de contact a dinilor n angrenare, coeficientul de modulaie
a rigiditii poate fi mic, de asemenea, fora transmis ntre dinii aflai n angrenare,
este dependent de viteza liniar a punctului de contact i de puterea transmis n
angrenaj. Deci, n cazul unei anumite configuraii a sistemului de angrenaje, schema
de control poate fi aplicat.
5.11.2. Configurarea traductorilor i actuatorilor
Chiar dac modelul teoretic analizat la punctul anterior este util n
determinarea forei de control necesare, trebuie luat n considerare angrenajul real,
atunci cnd cercetm configurarea actuatorilor. n continuare, se propune o
configuraie special a actuatorilor pentru generarea forelor secundare necesare
pentru anularea vibraiei torsionale a roii dinate, precum i configuraia special a
traductorilor, pentru msurarea vibraiei torsionale a roii dinate.
Pentru a echilibra fora care acioneaz la centrul roii i momentul de torsiune
creat de fora normal din angrenare
n
F care este funcie de timp, sunt necesari trei
actuatori montai la 120, unul fa de altul, aa cum este prezentat n fig. 5.40.
Vom nota forele dezvoltate de cei trei actuatori aflai la distanele
a
r , fa de
axa de rotaie cu
3 2 1
f , f , f . Fora normal n angrenaj,
n
F , acioneaz la distan r ,
de axa de rotaie, de-a lungul liniei de angrenare, la un unghi de presiune , fa de
direcia tangenial. Actuatorii trebuie s anuleze variaiile forelor, pe cele dou
direcii x i y i fluctuaiile momentului de torsiune generat de ctre fora normal
n
F . Ecuaiile de echilibru a forelor pe cele dou axe i a momentelor fa de centrul
de rotaie O pot fi scrise sub forma:
( ) =
|
.
|
\
|
+ +
|
.
|
\
|
+ + + sin F
3
4
t sin f
3
2
t sin f t sin f
n 0 3 0 2 0 1
(5.122)
( ) =
|
.
|
\
|
+ +
|
.
|
\
|
+ + + cos F
3
4
t cos f
3
2
t cos f t cos f
n 0 3 0 2 0 1
(5.123)
218
= + + cos r F r f r f r f
n a 3 a 2 a 1
(5.124)
Fig. 5.40
Combinnd ecuaiile (5.122), (5.123) i (5.124), rezult fora
pentru fiecare actuator:
( )
)
`
+
(
= cos r
3
2
1 n cos r 2
r 3
F
f
a
a
n
n
(5.125)
unde + = = t 1,2,3,..., n .
Rata maxim a forei, pentru fiecare actuator, la o for normal
n
F , raportat
la o rotaie a roii, poate fi determinat din ecuaia (5.125), prin derivarea acesteia n
raport cu timpul i egalarea cu zero:
|
|
.
|
\
|
+ =
co
r
r
2
3
1
F
f
a
max
n
n
(5.126)
Se poate vedea c maximul ratei este independent de frecven.
ntruct cei trei actuatori sunt poziionai simetric, maximul ratei forei pentru
fiecare actuator este acelai, fiind diferit numai prin diferena de faz.
Traductorii au fost configurai ntr-un mod similar cu actuatorii. Dac vom
considera c acceleraia instantanee a roii n direcia x este
x
a , n direcia y este
y
a i
acceleraia unghiular & & , atunci acceleraiile
3 x 2 x 1 x
a , a , a msurate de fiecare
traductor pot fi scrise:
( ) ( ) r t cos a t sin a a
0 y 0 x 1 s
+ + + + = & & (5.127)
r
3
2
t cos a
3
2
t sin a a
0 y 0 x 2 x
+
|
.
|
\
|
+ +
|
.
|
\
|
+ = & & (5.128)
r
3
4
t cos a
3
4
t sin a a
0 y 0 x 3 x
+
|
.
|
\
|
+ +
|
.
|
\
|
+ = & & (5.129)
Combinnd ecuaiile (5.127), (5.128) i (5.129), rezult ecuaia acceleraiei
roii dup cele trei axe:
( ) ( ) ( ) | |
3 s 2 s 1 s x
a cos 3 sin a cos 3 sin a sin 2
3
1
a + + + = (5.130)
219
( ) ( ) ( ) [ ]
3 s 2 s 1 s y
a cos sin 3 a cos sin 3 a cos 2
3
1
a + + + = (5.131)
( )
3 s 2 s 1 s
a a a
r 3
1
+ + = & & (5.132)
Folosind ecuaiile (5.130), (5.131), (5.132), acceleraia instantanee a roi poate fi
obinut din valorile celor trei acceleraii msurate de cele trei traductoare fixate pe
roat.
5.12. Absorbitorul dinamic activ de vibraii
5.12.1. Introducere
Absorbitorul dinamic este un sistem oscilant complet sau incomplet care se
ataeaz unei structuri n vederea eliminrii vibraiilor acesteia, atunci cnd asupra
structurii acioneaz fore perturbatoare periodice, a cror pulsaie este egal cu
pulsaia proprie. Sistemul oscilant reprezentat de structur se numete sistem primar
sau fundamental, iar absorbitorul dinamic se numete sistem ataat sau auxiliar.
n punctul su de aplicaie, absorbitorul dinamic acioneaz asupra masei
primare cu o for de aceeai frecven cu fora perturbatoare, dar de sens opus.
Absorbitorul dinamic poate fi proiectat odat cu structura ale crei vibraii
trebuie eliminate sau poate fi adugat ulterior. Acesta poate aciona asupra ntregii
structuri, sau poate fi ataat unui anumit element, a crui funcionare produce vibraii
de ansamblu ale structurii.
Absorbitorul dinamic poate fi utilizat pentru eliminarea vibraiilor axiale, de
ncovoiere, de rsucire, oscilaiile de ruliu ale navelor etc.
n figura 5.41 sunt prezentate cele mai uzuale modele de absorbitori dinamici.
Absorbitorii dinamici se utilizeaz n urmtoarele scopuri:
eliminarea vibraiilor axiale i de rsucire ale mainilor rotative ;
eliminarea vibraiilor paletelor de turbin, la rotorul principal al elicopterelor i
la elicele navelor ;
eliminarea vibraiilor produse de vnt i de seisme la liniile electrice aeriene,
poduri, turnuri, cldiri etc.
Absorbitorii dinamici pot fi clasificai n: absorbitori dinamici pasivi i
absorbitori dinamice activi.
Absorbitorii dinamici pasivi nu folosesc surse exterioare de energie, au o
structura simpl i funcioneaz cu eficien bun ntr-un domeniu de frecvena
relativ ngust.
Absorbitorii dinamici activi sunt eficieni pentru o band larg de frecvene
perturbatoare. La aceti absorbitori, elementul elastic i cel amortizor sunt nlocuite
cu un element activ, a crui comanda se regleaz n funcie de cerinele instantanee de
funcionare, folosind energie din exteriorul sistemului, elementul activ fiind de cele
mai multe ori un dispozitiv electrohidraulic sau electrodinamic.
220
Fig. 5.41.
Absorbitorii dinamici adaptivi reprezint o soluie eficient pentru controlul
activ al vibraiilor, n special n cazul perturbaiilor armonice.
5.12.2. Studiul teoretic al absorbitorului dinamic
S considerm o main de mas m, aezat pe fundaie prin intermediul unui
izolator elastic de rigiditate k
1
, asupra creia acioneaz o for perturbatoare
armonic t sin F
o
(fig. 5.42). Dac pulsaia a forei perturbatoare coincide cu
pulsaia proprie
o
a sistemului, apare rezonana.
Pentru a evitarea fenomenului de rezonan trebuie modificat k
1
, m
1
sau .
Sunt cazuri n care aceste modificri nu sunt posibile, datorit unor
considerente constructive, funcionale sau de alt natur.
n acest caz pentru a evita rezonana se transform sistemul iniial (principal),
care are un grad de libertate, ntr-un sistem cu dou grade de libertate, prin adugarea
unui sistem elastic auxiliar numit absorbitor dinamic.
Dac se scrie ecuaia fundamental a dinamicii, proiectat pe direcia micrii
pentru cele dou mase se obine :
0 ) x x ( k x m
t sin F x k x ) k k ( x m
1 2 2 2 2
o 2 2 1 2 1 1 1
= +
= + +
& &
& &
(5.133)
Introducnd n ecuaiile 5.133 soluii armonice de forma :
221
Fig. 5.42
t sin A ) t ( x
t sin A ) t ( x
2 2
1 1
=
=
(5.134)
Se obine sistemul algebric:
1
2
2 2
2
2 2 2 2 2 1 2
0 2 2 1
2
1 2 1
A
m k
k
A 0 ) m k ( A A k
F A k A ) m k k (
= = +
= +
(5.135)
nlocuind aceast valoare n prima ecuaie se obine:
2
2
2
2 2
2
1 2 1
o 2 2 2
1
k ) m k )( m k k (
F ) m k (
A
+
= (5.136)
Rezult c 0 A
1
= , pentru
2
2
a
m
k
= =
Dac sistemul funcioneaz la rezonan, rezult:
1
1
o
m
k
= =
Se observ c pentru absorbitorul dinamic simplu relaia de dimensionare este:
2 1
1
m
k
m
k
2
=
Dac, asupra mainii acioneaz fore perturbatoare armonice de pulsaie
constant, egal cu pulsaia:
2
2
1
1
2
m
k
m
k
= = , amplitudinea A
1
a masei m
1
este nul.
Prin ataarea absorbitorului dinamic, numrul de grade de libertate ale
sistemului primar crete cu o unitate, crescnd i numrul de pulsaii proprii i deci
222
pericolul apariiei rezonanei. Pentru a mri eficiena absorbitorului dinamic, ntr-un
domeniu de frecven mai larg, se poate introduce n sistemul secundar un element
activ n paralel cu elementul elastic al sistemului secundar (fig. 5.43), care s
dezvolte o for a crei amplitudine i faz sunt funcie de deplasarea masei primare
i care reduce sau anuleaz micarea acesteia.
Dac fora generat de elementul pasiv este proporional cu deplasarea x
2
a
masei m
2
, constanta de proporionalitate fiind k
e
, atunci ecuaiile difereniale ale
micrii celor dou mase sunt:
Fig. 5.43
0 x k ) x x ( k x m
t sin F x k x k ) x x ( k x m
2 e 1 2 2 2 2
o 2 e 1 1 2 1 2 1 1
= + +
+ = + +
& &
& &
De obicei, elementul activ funcioneaz numai la frecvene joase, iar la
frecvene nalte sistemul se comport ca un absorbitor dinamic pasiv.
Eficacitatea elementului activ poate fi apreciat comparnd amplitudinea
vibraiilor masei primare, produse de fora perturbatoare cnd acesta se afl n
funciune, cu cea din situaia n care elementul activ nu lucreaz.
5.12.3. Construcia absorbitorului dinamic adaptiv
Absorbitorul dinamic adaptiv are n structura sa un mecanism adaptabil, cu
ajutorul cruia se poate modifica on-line frecvena proprie a absorbitorului.
n cazul absorbitorului dinamic adaptiv, controlul activ al vibraiilor se
realizeaz prin modificarea masei sau a rigiditii absorbitorului (fig. 5.44).
n numeroase aplicaii, controlul activ al absorbitorilor dinamici se realizeaz
acionnd asupra masei, dei, puterea necesar pentru modificarea rigiditii arcului
este mai mic, dect puterea necesar pentru a modifica direct masa absorbitorului.
223
Fig. 5.44 Fig. 5.45
n cazul absorbitorului adaptiv prezentat n figura 5.45, controlul activ al
vibraiilor se realizeaz prin modificarea rigiditii absorbitorului, modificnd poziia
celor dou mase ale absorbitorului, de-a lungul barelor de susinere.
Aceast metod poate fi considerat ca o metod adaptiv pasiv de control a
vibraiei. Poziia masei absorbitorului este determinat cu ajutorul unui traductor
liniar de deplasare. Metodele adaptiv-pasive implic utilizarea unor elemente pasive
de control care pot fi optimizate ntr-un domeniu de frecven.
Absorbitorii adaptivi au fost utilizai la controlul dezechilibrului arborilor n
micare de rotaie. Absorbitorul dinamic adaptiv de vibraii, cu rigiditate variabil,
are urmtoarele avantaje:
construcie i exploatare simpl;
funcionare ntr-un domeniu larg de frecven;
pre de cost sczut;
consum energetic redus.
5.13. Controlul activ al zgomotului la ventilatoarele axiale
5.13.1. Introducere
Ventilatoarele axiale de rcire sunt surse frecvente de zgomot n cazul
sistemelor electronice. Zgomotul aerodinamic produs de ventilatoarele axiale are
dou componente importante, fiind format dintr-o component de rotaie i una
turbionar. Mecanismele de generare a componentei de rotaie au fost studiate pe
larg, aceasta fiind determinat de impulsurile de aer create de trecerea paletelor
printr-un punct dat i prezint vrfuri discrete n spectrul de frecven la frecvena
fundamental 60 / z n f
r
= i armonicele acesteia, n care z reprezint numrul de
palete, iar n este turaia rotorului n rot/min.
Componenta turbionar a zgomotului aerodinamic este produs de pulsaiile
aerului care apar la trecerea curentului de aer n jurul unor obstacole fixe sau n jurul
paletelor n micare, avnd energia repartizat pe o serie de componente armonice ale
frecvenei de rotaie i un nivel cu 20 30 dB mai redus dect nivelul componentei
de rotaie, care are valori importante n domeniul de frecven 100 600 Hz.
n foarte multe sisteme electronice este dificil s se realizeze o atenuare
acustic pasiv semnificativ n acest domeniu de frecven.
224
Din aceast cauz, cercetrile recente prezentate n literatura de specialitate n
acest domeniu au urmrit perfecionarea sistemelor active pentru controlul
zgomotului de frecven joas generat de ventilatoare.
Acest lucru este posibil ntruct, la frecvene joase, energia acustic se
propag, la ventilatoarele axiale, prin unde plane. Controlul activ al zgomotului
generat de ventilatoare a devenit viabil recent ca urmare a dezvoltrii software i
hardware n domeniul procesrii semnalului digital (DSP).
5.13.2. Determinarea experimental a radiaiei acustice a ventilatoarelor
axiale
Eficiena unui sistem de control activ, al zgomotului generat de ventilator,
depinde de caracteristicile cmpului acustic creat de acesta.
Pentru determinarea experimental a caracteristicilor cmpului acustic generat
de ventilatorul axial testat au fost realizate msurri ale directivitii cmpului acustic
cu ajutorul lanului de msurare i analiz prezentata n fig. 5.46.
Pentru msurarea directivitii cmpului acustic microfonul a fost fixat, iar
ventilatorul a fost rotit din 5
o
n 5
o
, msurndu-se nivelul minim i maxim al
presiunii acustice ntr-o perioad de 5 secunde, pentru fiecare poziie a ventilatorului
i pentru fiecare 1/3 de octav.
n figura 5.47 i 5.48 sunt prezentate rezultatele msurtorilor corespunztoare
frecvenei de rotaie f
1
= 225 Hz i respectiv zgomotul de band lat.
Din analiza celor doua diagrame rezult c zgomotul rotaional are maximul
dominant n domeniul 0 50
o
, n timp ce zgomotul de band lat nu este evident
direcionat.
Fig.5.46
Rezult c zgomotul rotaional poate fi atenuat prin amplasarea unei singure
surse de zgomot, defazat cu 180
o
fa de zgomotul generat de ventilator.
Msurarea zgomotului ventilatorului n domeniul timp arat c acesta are o
variaie de 5 dB n timp de 5 s.
225
Fig. 5.47 Fig. 5.48
5.13.3. Sistemul de control activ al zgomotului
Cercetrile experimentale au urmrit determinarea atenurii realizate de
sistemul de control prin generarea unui cmp acustic defazat cu 180
o
fa de cmpul
acustic realizat de ventilator.
Monitorizarea interferenei dintre cmpurile acustice generate de cele dou
surse (ventilator i difuzor) se realizeaz cu ajutorul unui microfon amplasat la
jumtatea distanei dintre sursele acustice.
n figura 5.49 este prezentat schema lanului de control activ.
Fig. 5.49
5.13.4. Algoritmul de predicie pentru controlul activ al zgomotului
n figura 5.50 este prezentat schematic sistemul de control activ feedback al
zgomotului, n care e(n) reprezint semnalul digital de eroare, iar y(n) este semnalul
digital antizgomot.
226
n figura 5.51 este prezentat diagrama bloc echivalent a sistemului de
control, n care v(n) reprezint semnalul de la sursa de zgomot; d(n) este semnalul
datorat erorii de sensibilitate a microfonului, e(n) este zgomotul rezidual de la
microfon; j(n) este semnalul antizgomot de la sistemul de control feedback; P(z)
reprezint calea principal acustic de la sursa de zgomot la microfon; W(z) este
funcia de transfer a filtrului digital adaptiv; H
e
(z) reprezint eroarea cii de semnal.
Dup aplicarea transformrii z asupra semnalului digital d(n) i e(n), semnalul
eroare, dup sumare, poate fi exprimat prin relaia:
) z ( H ) z ( W 1
) z ( D
) z ( E ) z ( H ) z ( W ) z ( D ) z ( E
e
e
= + = (5.137)
n domeniul frecvenei normalizate, ecuaia (5.137) se poate scrie i sub
forma:
2
e
dd ee
) ( H ) ( W 1
1
)( ( S ) ( S
= unde S
ee
() i S
dd
() reprezint densitatea
spectral a mediei ptratice a semnalului de zgomot rezidual e(n) i respectiv a
semnalului msurat de microfon d(n), iar W() i H
e
() sunt spectrele de putere
normalizate ale lui W(z) i respective H
e
(z).
Densitatea spectral S
ee
() are valoarea minim atunci cnd
2
e
) ( H ) ( W 1
are valoarea maxim. Semnalul eroare tinde la 0 atunci cnd amplitudinea
rspunsului filtrului adaptiv i eroarea cii W()H
e
() .
Fig.5.50
Acest rezultat poate fi obinut dac rspunsul filtrului adaptiv W().
Dar S
ee
() cnd W()H
e
() 1.
Ecuatia (5.137) poate, de asemenea, fi scris sub forma:
( )
) z ( H ) z ( W 1
) z ( D ) z ( H z H
) z ( D ) z ( E
e
e
+ = (5.138)
227
Fig. 5.51
5.13.5. Algoridmul de predicie pentru semnalul zgomotului primar
Semnalul de la microfon, prezentat n fig. 5.50, nu este disponibil, ntruct este
combinat cu semnalul antizgomot y(n).
Dac funcia de transfer a cii de eroare poate fi msurat cu acuratee n avans
i dac matricea reprezentrii poate fi inversat, exceptnd ntrzierea de propagare
dintre difuzor i microfon, atunci problema esenial devine una de predicie a
semnalului de zgomot primar d(n).
Cerinele de baz ale algoritmului de predicie a semnalului de zgomot primar
este de a estima semnalul de zgomot primar d(n) i de a utiliza predicia ca semnal de
intrare pentru filtrul adaptiv W(z).
Dup ce se face transformata z a semnalelor prezentate n figura 5.52 obinem:
) z ( Y ) z ( H ) z ( E ) z ( D
e
=
E(z) i Y(z) fiind disponibile pe sistemul de control activ feedback.
Dac funcia de transfer a cii de eroare este aproximat prin C(z), rezult:
C(z) H
e
(z) i deci ) z ( Y ) z ( C ) z ( E ) z ( D
Completnd sistemul de control cu un filtru LMS se obine sistemul prezentat
n figura 5.52.
Zgomotul primar x(n) este estimat cu relaia:
=
=
=
1 M
0 i
i
) i n ( y c ) n ( e ) n ( x
unde c
i
= 0,1,2,3m-1 sunt coeficienii filtrului de estimare a erorii C(z) iar m este
ordinul filtrului cu rspuns finit (FIR) care produce semnalul de zgomot primar
modificat X
/
(). Estimarea funciei de transfer H
e
(z) poate fi fcut offline sau on
line. Dup ce se face transformata z a semnalelor prezentate n fig. 5.53 se obine:
) z ( Y ) z ( C ) z ( E ) z ( X = (5.140)
Cu ecuaia (5.140) se obine:
) z ( Y ) z ( C ) z ( H ) z ( D ) z ( X
e
+ = (5.141)
Dac filtrul adaptiv, care modeleaz eroarea cii, converge la H(e), rezult C(z)
H
e
(z) i deci X(z) D(z) sau x(n) d(n). W(z) poate fi nlocuit cu H
e
(z) pentru o
convergen mai lent a erorii ctre zero. Dac funcia de transfer a cii secundare
Rezult c semnalul eroare tinde la 0 cnd:
) z ( D
) z ( H ) z ( W 1
) z ( D ) z ( H ) z ( W
e
e
=
(5.139)
lucru posibil dac semnalul primar de zgomot
D(z) este periodic i
) z ( H ) z ( W 1
) z ( H ) z ( W
e
e
este egal
cu o ntrziere care este multiplu a perioadei
semnalului.
228
H
e
(z) poate fi modificat cu o ntrziere, rezult H
e
(z) = z
-
, i deci sistemul prezentat
n figura 5.39 poate fi redus la o schem de predicie cu filtru adaptiv standard.
Fig. 5.52
5.12.6. Testarea sistemului de control activ
n fig. 5.53 este prezentat spectrul de frecven al zgomotului primar generat de
ventilator, n care se evideniaz componenta spectral a zgomotului rotaional (225
Hz) a crui nivel este cu aproximativ 15dB mai mare dect componentele spectrale
aleatoare ale zgomotului turbionar.
Fig. 5.53
Fig. 5.54
n fig. 5.54 este prezentat spectrul
zgomotului msurat atunci cnd
funcioneaz sistemul de control
activ, din care rezult o atenuare mai
mare de 10 dB a componentei
spectrale fundamentale a zgomotului
rotaional i de 7 dB pentru armonica
a doua, n timp ce nivelul global al
zgomotului a sczut de la 62 dB(A)
la 60 dB(A). Cercetrile
experimentale au demonstrat foarte
clar eficiena sistemului de control
activ al zgomotului pentru reducerea
componentei spectrale fundamentale
a zgomotului rotaional i a
armonicilor acesteia, prin utilizarea
unei singure surse acustice de
anulare. Nu este ns clar dac
tehnica controlului activ poate fi
utilizat eficient pentru anularea
zgomotului de band larg, generat
de ventilator.
229
6
DIAGNOSTICAREA I MONITORIZAREA
VIBROACUSTIC A SISTEMELOR MECANICE
6.1.Diagnosticarea dezechilibrrii pieselor n micare de rotaie
Dezechilibrul pieselor n micare de rotaie constituie o surs important i
frecvent de vibraii la maini i utilaje, mai ales n cazul unor turaii ridicate.
Fig. 6.1
Fig. 6.2
Condiia de echilibru este : e =
M
r . m
, n care e se numete dezechilibru specific.
Procesul prin care se realizeaz coincidena ntre centrul de greutate al discului
i axa de rotaie se numete echilibrare static sau primar.
Echilibrarea static este eficient n cazul rotoarelor la care masa neechilibrat
poate fi separat ntr-un plan i echilibrat prin adugarea sau eliminarea unei mase n
acel plan.
Dac dimensiunea axial a rotorului este mai mare dect diametrul acestuia,
masele neechilibrate genereaz n afara forelor centrifuge perturbatoare i un cuplu
neechilibrat, care reprezint momentul rezultant al tuturor forelor neechilibrate, n
raport cu centrul de greutate al acestuia i care tinde s produc o deplasare
unghiular a axei principale de inerie a rotorului fa de axa de rotaie (fig. 6.2).
Procesul prin care se realizeaz coincidena dintre axa de rotaie i axa de
inerie principal a rotorului se numete echilibrare dinamic sau secundar.
Cauzele dezechilibrului pot fi :
erorile de execuie i montaj
(excentricitatea fusurilor, dezaxarea
lagrelor etc.);
neomogenitatea materialului (incluziuni n
piesele turnate, variaii de densitate la
piesele laminate sau forjate etc );
configuraia nesimetric a pieselor;
fenomene aerodinamice etc.
Cazul cel mai simplu de dezechilibru este
cel al unui disc de mas M al crui centru de
greutate se afl la distana e fa de axa de rotaie
i se rotete cu viteza unghiular (fig. 6.1). n
acest caz se produce o for centrifug F =
M.e.
2
, care poate fi anulat prin ataarea unei
mase m aflate la distana r fa de axa de rotaie.
230
Echilibrarea dinamic se realizeaz n dou sau mai multe plane.
Un rotor echilibrat dinamic va fi echilibrat i static, reciproca nefiind valabil.
Datorit forelor centrifuge create de masele dezechilibrate, n lagre apar fore
dinamice care sunt formate dintr-o component primar datorit masei neechilibrate
din planul lagrului i o component secundar datorit cuplului neechilibrat.
Nivelul vibraiilor msurat pe lagr va fi direct proporional cu rezultanta
forelor create de masele neechilibrate.
Se poate defini dezechilibrul la nivelul lagrului cu ajutorul unui vector a crui
mrime este dat de mrimea forei rezultante care acioneaz n lagr (msurat prin
nivelul de vibraii) i al crui unghi este dat de direcia de aciune a forei rezultante,
care poate fi determinat precis prin compararea fazei semnalului periodic creat de
vibraia lagrului cu un semnal periodic de referin, obinut dintr-o poziie de
referin a piesei n rotaie. Nivelul vibraiilor poate fi msurat n funcie de
acceleraie, vitez sau deplasare.
Deoarece recomandrile i standardele de echilibrare sunt date n funcie de
vitez i pentru a asigura o utilizare eficient a gamei dinamice a aparatelor se
recomand nivelul vibraiei n funcie de vitez.
Echilibrarea dinamic a rotoarelor se poate realiza prin montarea acestora pe
maini de echilibrat sau n condiii reale de funcionare pe propriile lagre, cu ajutorul
echipamentelor portabile de echilibrat.
n ambele situaii se urmrete determinarea vectorului dezechilibru n fiecare
din planele de echilibrare. n principiu, o main de echilibrat conine un sistem de
reazeme deplasabile pe care se monteaz rotorul de echilibrat, o unitate de acionare
i o unitate de msurare. Transmiterea micrii de rotaie de la unitatea de acionare
la rotor se realizeaz printr-un arbore cardanic, transmisie prin curea, cuplaje, jeturi
de aer, sisteme electrice etc.
Determinarea strii de dezechilibru a rotorului se poate face:
prin msurarea efectelor produse de dezechilibru n reazemele rotorului;
prin crearea de fore cu ajutorul unor dispozitive speciale, care s compenseze
forele generate de dezechilibru.
Mrimea i faza forelor suplimentare furnizeaz informaiile necesare
realizrii echilibrrii.
6.1.1. Planele de echilibrare
Planele alese pentru fixarea maselor de echilibrare sunt numite plane de
echilibrare. Discurile sunt n mod obinuit echilibrate ntr-un singur plan.
Un disc echilibrat ntr-un singur plan funcioneaz corect dac distana dintre
lagre este suficient de mare. Echilibrarea ntr-un singur plan este justificat atunci
cnd timpul disponibil pentru echilibrare este mic. i n cazul discurilor este necesar
ca echilibrarea s se realizeze n doua plane, ct mai ndeprtate unul de cellalt, n
mod obinuit n apropierea fusurilor rotorului.
n cazul rotorilor elastici se utilizeaz obligatoriu mai mult de dou plane de
echilibrare. Rotorul elastic trebuie echilibrat mai nti la o turaie sczut prin
231
plasarea maselor q
1
i q
2
n planele de echilibrare, poziionate ct mai aproape de
capetele rotorului.
Ulterior, la o turaie apropiat de turaia critic se fixeaz o mas suficient de
mare q
3
, n planul de echilibrare 3, simultan cu poziionarea unor mase q
3
/2 n planele
de echilibrare 1 i 2, n poziie opus cu masa de echilibrare q
3
, astfel nct s nu fie
deteriorat echilibrarea preliminar realizat la viteze mici.
Fig. 6.3
6.1.2. Echilibrarea rotorilor pe stand
Standul de echilibrare al rotorilor trebuie s permit determinarea, printr-o
metoda oaresare, a maselor de echilibrare, ct i poziia unghiular a acestora n
planele de echilibrare alese.
Considernd sistemul elastic al unui stand de echilibrat format din rotor i
sistemul de rezemare, acesta poate fi studiat n cel mai simplu caz cu ajutorul unui
model cu un singur grad de libertate, a crei pulsaie proprie este:
o
=
p
m M
k
+
n care : M = masa rotorului , n Kg ; m
p
= masa auxiliar, n Kg;
k = rigiditatea sistemului, n N / m.
Dac viteza de rotaie la echilibrare este <
o
, suspensia rotorului este rigid.
Exist rotori pentru care viteza de lucru
are o valoare apropiat de turaia critic de
ordinul 2 sau 3.
n aceste situaii, trebuie considerate
plane de echilibrare suplimentare pentru a
obine o echilibrare corect, dup cum
urmeaz (fig.6.3):
3 plane de echilibrare pentru
evitarea efectelor primei turaii critice;
4 plane de echilibrare pentru
evitarea efectelor la a doua turaie critic;
5 plane de echilibrare pentru
evitarea efectelor la a treia turaie critic.
Operaia de modificare a distribuiei
masei rotorului se poate realiza n planele
de echilibrare prin:
mase suplimentare;
eliminarea de mas;
redistribuirea masei rotorului.
Modul I
Modul II
Modul III
232
Forele create de dezechilibrul rotorului sunt transmise elastic la supori i sunt
n faz cu deplasarea (fig. 6.4). n cazul rezemrii rigide, se monteaz traductori care
dau un semnal proporional cu fora centrifug.
Dac >>
o
, suspensia rotorului este moale, fora creat de dezechilibrul
rotorului este n antifaz cu deplasarea. La suspensia moale, traductorii msoar
micarea liniar a lagrului.
Fig. 6.4
Perfecionarea aparaturii electronice de msurare i analiz a vibraiilor, a fcut
ca standurile de echilibrat s fie realizate cu supori rigizi sau moi, ntruct acetia au
o comportare mai stabil, fa de standurile care lucreaz la rezonan.
6.1.3. Sistemul de msurare pentru echilibrare
Utilizarea standurilor de echilibrat cu suspensie moale sau rigid este
determinat de tipul de traductor, tipul de rotor care poate fi echilibrat i de
dezechilibrarea rezidual admisibil. Standurile de echilibrat pot fi mprite n:
standuri de echilibrare prin gravitaie;
standuri de echilibrat centrifugale;
echipamente pentru echilibrare n situ .
Standurile de echilibrare prin gravitaie sunt de tipul: cu cuite orizontale, cu
role sau cu pendul.
La mainile de echilibrat centrifugale, echilibrarea se face prin msurarea
amplitudinii i fazei micrilor sau reaciunilor produse de forele de dezechilibrare.
Sistemele de msurare includ traductori de viteze sau acceleraii pentru
determinarea amplitudinii i traductori piezoelectrici pentru msurarea amplitudinii
forelor. Coreciile privind distribuia maselor de echilibrare se fac empiric, sau prin
calcul cu ajutorul calculatorului.
233
Separarea planelor de echilibrare poate fi obinut cu ajutorul unor circuite
electronice de calcul asociate standului de echilibrat. Aceste circuite permit calculul
maselor de echilibrare, dac este cunoscut distana dintre lagre, distana dintre
planele de echilibrare i poziia centrului de greutate.
Echipamentele moderne de echilibrare folosesc pentru msurarea vibraiei
accelerometre piezoelectrice care au o construcie simpl i robust, precum i un
domeniu extins de frecven. Pentru semnalele cu nivel redus i pentru impedan
ridicat este necesar o condiionare prealabil a semnalului ntr-un amplificator de
sarcina. Msurarea unghiului se poate realiza cu ajutorul unui traductor magnetic sau
fotoelectric i al unui fazmetru, utiliznd lanul de msurare din fig. 6.5. Traductorul
magnetic, emite un impuls la fiecare rotaie.
Fig. 6.5
Msurarea vibraiei lagrelor se realizeaz cu ajutorul vibrometrului, nivelul
vibraiei indicat de vibrometru, mpreun cu unghiul indicat de fazmetru dau vectorul
ce reprezint dezechilibrul i direcia acestuia.
Utilizarea filtrului trece band, permite filtrarea semnalului armonic generat de
dezechilibru, care are frecvena egal cu frecvena de rotaie (f
i
=n/60[Hz]) i deci
eliminarea erorilor generate de semnalele parazite.
Utilizarea filtrului de band nu este recomandat atunci cnd n timpul
ehilibrrii rotorului se transmit la lagrele acestuia i vibraiile generate de alte surse
de vibraii (motor de acionare, transmisii mecanice, fore aerodinamice etc.).
Filtrul este conectat la vibrometru ca un filtru exterior i trebuie acordat riguros
pe frecvena de rotaie a rotorului, pentru a evita erorile de faz care pot s apar i
deci erori de citire a unghiului de poziie a dezechilibrului.
Utilizarea unei uniti trigger, permite eliminarea acestor erori de faz.
6.1.4. Echilibrarea n situ
Adesea, echilibrarea rotorilor este dificil din cauza greutii i a gabaritului
foarte mare. n aceste cazuri, echilibrarea rotorilor trebuie realizat n condiiile de
funcionare, utiliznd echipamente portabile de echilibrare, care sunt mai dificil de
utilizat dect mainile de echilibrat, dar au un domeniu mai larg de utilizare, putnd fi
234
folosite i n procesul de monitorizare i diagnosticare a mainilor, prin analiza
spectrelor de vibraii.
n acest caz, vibraiile generate de rotor n timpul funcionrii sunt msurate
prin montarea traductorilor de vibraii pe carcasele lagrelor.
Calibrarea echipamentului de echilibrare se realizeaz prin introducerea n
sistem a unei valori cunoscute a dezechilibrului n planele de echilibrare i msurarea
caracteristicilor de transfer ntre planele de dezechilibrare i poziia de msurare.
Dac sistemul are o comportare liniar i se asigur coincidena de faz ntre
schimbrile de dezechilibru i schimbarea comportrii vibratorii a sistemului, atunci
pot fi determinate prin calcul masele de echilibrare necesare. n timpul determinrilor
trebuie meninut constant turaia rotorului i poziia traductorului de vibraii.
Pentru echilibrarea ntr-un singur plan se determin iniial amplitudinea vitezei
vibraiilor v
o
i faza
o
, fa de o poziie de referin marcat pe rotor, dup care se
oprete rotorul i se fixeaz o mas de prob M
T
ntr-o poziie arbitrar.
Rotind rotorul la aceeai turaie, se obine amplitudinea vitezei v
1
i unghiul de
faz
1
, mrimi care permit construirea diagramei vectoriale din fig. 6.6.
Fig. 6.6
Mrimea masei de corecie este:
T
o 1
o
C
M
v v
v
M
= , care trebuie plasat la un
unghi
c
. n cazul unei comportri neliniare a sistemului, sau dac alegerea masei
este necorespunztoare, trebuie repetat operaia de echilibrare.
Procedura pentru echilibrarea dinamic este asemntoare cu cea pentru
echilibrarea static. Aceasta const n determinarea efectului unei mase de prob
cunoscute care se ataeaz la rotor. Diferena const n faptul c msurtorile trebuie
efectuate n cele dou plane ale lagrelor. Pentru echilibrarea dinamic, trebuie fcute
dou determinri, introducnd un dezechilibru cunoscut n dou plane de echilibrare.
Aceste probe sunt necesare pentru a permite definirea tuturor termenilor
matricei coeficienilor de influen.
235
Pentru a realiza echilibrarea dinamic sunt necesare urmtoarele faze:
a) Se determin dezechilibrul iniial n cele dou plane de echilibrare (prin
modul i unghi de faz): ) , V ( V
0 , 1 0 , 1 0 , 1
i ) , V ( V
0 , 2 0 , 2 0 , 2
;
b) Se ataeaz o mas de prob cunoscut
1
m n primul plan de echilibrare,
ntr-o poziie arbitrar cunoscut, dup care se determin efectul masei de prob prin
vectorii vibraiilor n cele dou plane ale lagrelor (modul i unghi de faz):
) , V ( V
1 , 1 1 , 1 1 , 1
i ) , V ( V
1 , 2 1 , 2 1 , 2
;
c) Se ndeprteaz masa
1
m i se ataeaz o mas de prob
2
m n al doilea
plan de echilibrare, la un unghi arbitrar i cunoscut, dup care se msoar vectorii
vibraiilor n cele dou plane ale lagrelor (prin modul i unghi de faz):
) , V ( V
2 , 1 2 , 1 2 , 1
i ) , V ( V
2 , 2 2 , 2 2 , 2
;
Pe baza acestor msurtori se pot trasa diagramele vectoriale din fig. 6.7
Fiecare diagram vectorial din fig. 6.7 este analog diagramei vectoriale
realizat pentru echilibrarea static.
Fig. 6.7
236
Cu toate acestea, n cazul echilibrrii n dou plane, cnd o mas de prob este
fixat n unul din planele de echilibrare, ea are un efect n ambele plane de msurare.
De aceea pentru a echilibra complet rotorul, este necesar s adugm mase de
corecie n ambele plane de echilibrare, astfel nct rezultanta vectorilor
corespunztori vibraiilor generate de masele de corecie din fiecare plan s anuleze
vectorii corespunztori vibraiei iniiale:
0 , 1
V i
0 , 2
V . Acest lucru poate fi obinut
prin modificarea masei i poziiei unghiulare a corpurilor de prob astfel nct s fie
modificat modulul i direcia diferenei de vectori:
0 , 1 1 , 1
V V ,
0 , 1 2 , 1
V V , etc.
Din punct de vedere matematic, problema const n gsirea a doi operatori
vectoriali, ) , Q ( Q
1 1 1
i ) , Q ( Q
2 2 2
care satisfac urmtoarele ecuaii:
= +
= +
0 , 2 0 , 2 2 , 2 2 0 , 2 1 , 2 1
0 , 1 0 , 1 2 , 1 2 0 , 1 1 , 1 1
V ) V V ( Q ) V V ( Q
V ) V V ( Q ) V V ( Q
(6.1)
Prin rezolvarea sistemului obinem:
0 , 1 1 , 1
0 , 1 2 , 1 2 0 , 1
1
V V
) V V ( Q V
Q
= (6.2)
) V V )( V V ( ) V V )( V V (
) V V ( V ) V V ( V
Q
0 , 1 1 , 1 0 , 2 2 , 2 0 , 1 2 , 1 0 , 2 1 , 2
20 1 , 2 0 , 1 0 , 1 1 , 1 0 , 2
2
= (6.3)
Astfel am gsit doi vectori: ) , Q ( Q
1 1 1
i ) , Q ( Q
2 2 2
cu ajutorul crora se
pot determina masele de compensare i poziiile n care acestea trebuie montate.
Astfel:
1 1 1 comp
m Q M = (6.4)
2 2 2 comp
m Q M = (6.5)
Poziiile la care trebuiesc montate masele de compensare
1 COMP
M i
2 COMP
M
sunt date de unghiurile
1
i respectiv
2
. Aceste unghiuri se msoar fa de poziiile
n care au fost ataate masele de prob
1
m i respectiv
2
m , poziii care au fost
marcate pe rotor n timpul operaiilor de msurare.
6.1.5. Alegerea maselor de prob
Echilibrarea dinamic necesit o corecie de prob realizat prin adugarea (de
regul temporar) a unei mase de prob pe rotor. Efectul acestei mase de prob asupra
amplitudinii i fazei vibraiei, msurate n timpul funcionrii de prob a rotorului,
permite calculul coreciei permanente ce trebuie fcut asupra rotorului.
Coreciile de prob trebuiesc realizate n aceleai plane i la aceleai raze la
care se vor face coreciile permanente.
Valoarea maselor utilizate pentru coreciile de prob nu trebuiesc luate la
ntmplare. Stabilirea acestor mase se face n concordan cu standardele n vigoare.
Conform standardul internaional ISO 1940 (Calitatea echilibrrii corpurilor
rigide n micare de rotaie) echilibrarea se realizeaz n urmtoarele etape:
237
funcie de treapta de calitate a rotorului i viteza maxim de rotaie, se
determin dezechilibrul specific cerut n ] kg / mm g [ ;
se determin masa rotorului n ] kg [ i raza la care se vor face coreciile n
] mm [ ;
se calculeaz masa rezidual maxim
RM
M n ] g [ cu relaia:
] g [
] mm [ r corectiilo raza
] kg [ rotrului masa ] kg / mm g [ specific rul dezechilib
M
RM
=
o mas de prob este potrivit dac este de 5 pn la 10 ori mai mare dect masa
rezidual maxim calculat anterior.
La fel ca n cazul echilibrrii statice, masele i unghiurile de corecie se pot
calcula utiliznd diagramele vectoriale. Deoarece n cazul echilibrrii dinamice acest
procedeu devine mult prea complicat, se recomand utilizarea unui calculator
programabil i a unui program special conceput pentru echilibrare.
6.1.6. Determinarea calitii echilibrrii
Pe baza datelor experimentale se accept c dezechilibrul admisibil al unui
rotor este proporional cu masa acestuia i se definete dezechilibrul specific e ca
raport ntre dezechilibrul rezidual admisibil n Kg.mm i masa rotrului n Kg.
Dezechilibrul specific e poate fi considerat ca excentricitate a centrului de
mas al rotorului, n cazul unui dezechilibru static.
Recomandarea IS0-1940-1973 i n concordan cu aceasta, STAS 10729-76,
stabilete gradele de calitate a echilibrrii, prezentndu-se i dezechilibrul rezidual
admisibil, pentru fiecare grad. n fig. 6.8 sunt prezentate limitele superioare ale
dezechilibrului specific n funcie de frecvena de rotaie.
Gradele de calitate a echilibrrii G sunt indicate prin valoarea produsului
] s mm [ e
1
i formeaz o proporie geometric cu raia 2.5 (4000; 1600; 630;
250; 100; 40; 16; 6.3; 2.5; 1; 0.4), pentru echilibrri de mare precizie putndu-se
utiliza grade intermediare de calitate a echilibrrii.
n general, pentru rotorul rigid, echilibrat n dou plane de echilibrare se poate
considera o jumtate din tolerana dezechilibrului pentru fiecare plan de echilibrare.
Un rotor se consider rigid dac turaia maxim a acestuia nu depete 0.7 din
prima sa turaie critic (de ncovoiere).
n cazul rotorului rigid, dezechilibrul rezidual se menine la toate turaiile din
domeniul de funcionare, ntruct la rotorul rigid nu apar deformaii, respectiv
deplasri de mas rezidual datorit forelor centrifuge, care s duc la o modificare
mai important a strii de echilibrare, n funcie de turaie.
Mrimea dezechilibrului rezidual al rotorului se calculeaz cu relaia:
u = m.r [g.mm].
238
n care m este masa de dezechilibru, n kg, iar r este distana de la masa de
dezechilibru pan la axa de rotaie, n mm. Dezechilibrul specific se calculeaz cu
relaia:
(
=
kg
mm . g
M
u
e
n care M este masa rotorului, n kg.
Fig. 6.8
Valorile admise pentru dezechilibrul specific sunt considerate pentru
echilibrarea pe fusuri, n lagrele proprii. Dac echilibrarea rotorului se face n mai
multe etape, valorile admise pentru dezechilibru specific se refer la echilibrarea n
etapa actual. n cazul rotorilor care funcioneaz la mai multe turaii, valorile admise
ale dezechilibrului rezidual specific se aleg pentru turaia nominal maxim.
n cazul n care echilibrarea se face n dou plane (fig. 6.9), valorile admise ale
dezechilibrului rezidual al rotorului n planele I i II, se calculeaz cu relaia:
1 2
c 2
I
l l
l l
e M u
= i
1 2
1 c
II
l l
l l
e M u
=
unde M este masa rotorului, n kg;
e-dezechilibrul rezidual specific admisibil, n mm;
l
1
, l
2
- distanele de la reazemul A pn la planele de corecie 1 i 2, n mm;
239
l
c
- distana de la reazemul A pn la centrul de greutate G, n mm.
Fig. 6.9
n cazul dispunerii simetrice a planelor de corecie, fa de centrul de greutate:
u
I
= u
II
= 0.5M.e
n cazul rotorului de mas M n form de disc, montat pe un arbore de mas M
a
mic, echilibrat ntr-un singur plan:
+ =
3
M
M e u
a
La proiectarea unei maini trebuie stabilite urmtoarele condiii pentru
realizarea echilibrrii:
poziia planelor de echilibrare;
valoarea maxim a dezechilibrului pentru fiecare plan de echilibrare;
suprafeele de rezemare ale rotorului n maina de echilibrat;
turaia de echilibrare.
6.2. Diagnosticarea transmisiilor prin roi dinate
De obicei, angrenajele reprezint cele mai importante surse de zgomot i
vibraii din structura mainilor i utilajelor mecanice, avnd o pondere nsemnat n
determinarea nivelului global de zgomot i vibraii. Sursele de excitaie n
funcionarea transmisiilor prin roi dinate pot fi interne sau externe sistemului.
n prima categorie se includ: ncrcarea variabil a unei perechi de dini,
deplasrile relative cauzate de rigiditatea variabil a danturii, deplasrile relative
variabile sau ocurile cauzate de erorile de angrenare, forele de frecare variabile ca
sens, forele axiale variabile ca poziie la angrenajele cu dini nclinai, excitaiile din
lagrele cu rulmeni sau cu alunecare etc.
Excitaiile externe sunt generate de variaia cuplului de acionare sau a cuplului
rezistent, care este specific fiecrei maini sau utilaj mecanic.
Comportarea vibroacustic a angrenajelor este influenat de urmtorii
parametri:
parametrii constructivi (modul, unghiul de nclinare al dintelui, flancarea
dintelui, material etc.);
parametrii tehnologici (clasa de precizie, eroarea de form a profilului,
rugozitatea flancurilor active, eroarea de direcie a dintelui etc.);
240
parametri de exploatare (viteza, sarcina, ungerea)
n tabel 6.1 sunt sintetizai parametrii constructivi ai angrenajelor i carcasei care
influeneaz nivelul de zgomot si vibraii.
Tabelul 6.1
Parametrul analizat Domeniul de
valori analizat
Influena creterii valorii
parametrilor asupra zgomotului
nclinarea dintelui 0 40 20 dB
Rigiditatea materialului - 12 db
Gradul de acoperire 1 12 3 dB
Flancarea dintelui (0 0.02)mm 6 dB
Modulul 1 12 2 dB
Numrul de dini z 2z 3 dB
Deplasarea specific de profil 0.092 0.883 1 dB
n ceea ce privete alegerea elementelor geometrice, o dificultate o constituie
asigurarea simultan a cerinelor de rezisten i a celor vibroacustice.
Erorile de execuie i de montaj determin deplasri relative suplimentare ale
roilor, care se suprapun peste cele determinate de rigiditatea variabil a danturii.
Creteri importante ale nivelului de zgomot, cu circa 20 dB, sunt determinate
de erorile de form ale profilului, care au frecvene ridicate, frecvene care pot s
coincid cu frecvenele proprii relativ mari ale transmisiei.
Creterea calitii suprafeelor de lucru ale flancurilor are un efect pozitiv
asupra nivelului de zgomot, remarcndu-se o reducere cu 3-4 dB a nivelului de
zgomot la dantura rectificat n raport cu dantura frezat.
Nivelul de vibraii i zgomot produs de un angrenaj n funcionare crete cu
ncrcarea transmis i cu viteza unghiular. Se constat c o dublare a nivelului de
ncrcare are ca efect o cretere a nivelului de zgomot cu 3-4dB, iar dublarea turaiei
produce o cretere cu 6-7dB, la aceeai ncrcare. Funcionarea angrenajului trebuie
s se realizeze la turaii care s evite fenomenul de rezonan. Influena vscozitii
uleiului asupra comportrii vibroacustice a angrenajelor este neglijabil.
6.2.1. Analiza n frecven a semnalului vibroacustic generat de angrenaje
n mod obinuit, spectrul de frecvene al vibraiilor i zgomotelor produse de
transmisiile cu roi dinate prezint vrfuri la urmtoarele frecvene:
a) Frecvena de angrenare i armonicele acesteia;
b) Componente secundare (accidentale);
c) Benzi laterale de frecvene;
d) Armonicele joase ale frecvenei de rotaie.
a) Armonicele frecvenei de angrenare
Vrfurile din spectrul de frecven corespunztoare frecvenei de angrenare i
armonicelor acesteia sunt create de ocurile periodice care apar n procesul de
angrenare datorit abaterilor de la profilul ideal aprute n procesul de prelucrare sau
rezultate n exploatare printr-o uzare neuniform a flancurilor.
241
De asemenea ocurile sunt create i de variaia periodic a deformaiei dinilor
aflai n angrenare, datorit repartiiei sarcinii transmise.
Referitor la uzarea flancurilor se poate arta ca acesta este mai mare de o parte
i alta a cercului de rostogolire, ceea ce provoac o distorsiune considerabil a
vibraiei uniforme generate de procesul de angrenare i aceast uzare este evideniat
mai bine la armonicele superioare ale frecvenei de angrenare dect la frecvena de
angrenare (fig. 6.10).
Fig. 6.10
b) Componentele secundare (accidentale) apar ca i componentele frecvenei
de angrenare, dar corespund unui numr diferit de dini i sunt datorate erorilor
cinematice din lanul cinematic al mainii de danturat. Aceste componente au
tendina s se atenueze prin rodarea angrenajului n tipul funcionrii.
c) Benzi laterale
Benzile laterale din jurul frecvenelor de angrenare i al armonicelor acestora
pot fi, n general, explicate prin modulaia n amplitudine sau frecven a vibraiei
uniforme a angrenajului datorit unor defecte locale. De exemplu, btaia radial a
danturii, sau excentricitatea arborilor de susinere a roilor dinate, face ca cercurile
de divizare ale celor dou roi aflate n angrenare s nu rmn tangente pe toat
durata rostogolirii.
Din aceast cauz, peste vibraia de frecven relativ mare corespunztoare
frecvenei de angrenare f
a
, se suprapune cea de frecven joas corespunztoare
frecvenei de rotaie a roii f
1
, rezultnd o vibraie modulat n amplitudine.
n cazul limit al modulaiei de 100%, componenta f
1
dispare, rmnnd
frecvenele laterale caracteristice modulaiei:
f
1i
= f
a
- f
1
i f
1s
= f
a
+ f
1
ntruct procesul de modulaie este distorsionat de erorile de prelucrare, iar
modulaia nu se realizeaz n procent de 100%, n spectrul de frecvene apar vrfuri i
la frecvenele:
jf - f f
1 a ji
= i f
js
= f
a
+ jf
1
cu j=2,3..
242
De asemenea, orice fluctuaie n ncrcarea dintelui va avea tendina s
genereze o variaie a amplitudinii vibraiei, deci apare o modulaie n amplitudine.
n acelai timp, aceste fluctuaii n ncrcarea dintelui, determin fluctuaii ale
vitezei unghiulare i deci apare i o modulaie n frecven. Cele dou modulaii (n
amplitudine i n frecven) determin o cretere a amplitudinii benzilor laterale de
frecven, aflate la o distan n spectru egal cu frecvena de modulaie.
Fiecare modulaie cu o frecven pur tinde s dea o familie de benzi laterale
de frecven, iar n cazul n care modulaia nu este pronunat aceasta poate fi
reprezentat de dou sau trei grupuri de benzi laterale.
n aceste condiii, efectul adiional al frecvenei de modulaie este de a crete
numrul benzilo
d) Armonicele joase ale frecvenei de rotaie
Acestea corespund impulsurilor cumulate ce se repet la fiecare rotaie a roii.
Modulaia n amplitudine sau frecven are tendina s dea semnale simetrice.
Orice asimetrie a semnalului poate fi interpretat ca un impuls aditiv i care de
asemenea d un numr de armonice ale frecvenei respective. n afara frecvenelor
menionate dependente de turaie, n spectrul de frecven mai pot sa apar i alte
componente semnificative, dependente de turaie, corespunztoare unor moduri
proprii de vibraie pentru transmisia cu roi dinate, carcas etc.
De exemplu, datorit variaiei n timp a rigiditii dinilor aflai n angrenare,
vibraiile angrenajelor sunt parametrice i se caracterizeaz prin existena mai multor
domenii de instabilitate la frecvene egale cu fraciuni raionale, multipli sau
submultipli ai frecvenelor proprii ale sistemului.
Domeniile de instabilitate apar la frecvene critice date de relaia:
( ) N / f f f
j i cr
+ = , n care f
i
i f
j
sunt frecvenele proprii ale sistemului;
i,j = 1,2..,n, n - numrul de grade de libertate, iar N=1,2..
Tot datorit rigiditii variabile a danturii rezonanele apar i cnd frecvena de
excitaie f
e
corespunde cu una din subarmonicele frecvenei proprii fundamentale f
i
,
deci cu ( )
i
f n / 1 , unde: n=2,3,4
Rezult deci c n spectrul de frecvene apar un numr mare de componente
spectrale detectabile, fapt care subliniaz dificultile unei identificri uoare i
corecte.
6.2.2. Frecvene proprii critice la angrenaje
Pentru optimizarea dinamic a cutiilor de vitez cu roi dinate este necesar
cunoaterea spectrului de frecvene proprii i a frecvenelor de excitaie.
La sistemele slab amortizate, cum sunt cutiile de viteze cu roi dinate, este
necesar s se evite fenomenul de rezonan, care produce o mrire a forelor dinamice
din angrenaje, nsoit de o cretere a emisiei de zgomot i o reducere a siguranei n
funcionare. n cazul sistemelor de acionare complexe, care utilizeaz cutii de viteze
cu trepte multiple, spectrul frecvenelor proprii i cel al frecvenelor de excitaie
prezint foarte multe vrfuri i din considerente economice, nu se poate asigura
243
condiia primordial a optimizrii (neegalitatea frecvenelor proprii cu cele ale
excitaiei). Se definesc ca fiind frecvene proprii critice, frecvenele proprii pentru
care frecvenele dinamice ce apar n angrenare devin foarte mari.
Determinarea frecvenelor proprii critice se poate realiza cu ajutorul analizei
modale. n cazul unei cutii de viteze cu n angrenaje se definesc pulsaiile proprii
critice, valorile pulsaiilor proprii pentru care suma forelor dinamice maxime din
cele n angrenaje are valori relative mari.
Rezult c valorile pulsaiilor proprii critice sunt date de pulsaiile pentru care
expresia [52]:
2
i
i
s
n
1 s
i
i
a
2
1
E
=
are valori relative mari, unde:
( ) ( )
( ) ( )
n
2
i
n 1
2
i
1
2
i
1 j
2
i
j i
s
m a .... m a
a a
a
+
=
+
iar:
i
j
a reprezint amplitudinea vibraiei gradului de libertate j n modul propriu de
vibraie i,
i
este fraciunea de amortizare critic corespunztoare modului propriu de
vibraie i, iar m
n
reprezint masa corespunztoare gradului de libertate n.
6.2.3. Diagnosticarea vibroacustic la cutiile de viteze cu roi dinate cu
ajutorul analizei CEPSTRUM
Detecia unui defect n condiii de funcionare se poate realiza prin compararea
nivelurilor de vibraii sau zgomot cu nivelurile admisibile.
Utilizarea nivelurilor admisibile standard nu este recomandat, ntruct
impedana mecanic variaz mult chiar la cutii de viteze de acelai tip.
n acelai timp, impedana mecanic variaz cu frecvena i deci utilizarea
criteriilor de apreciere absolute, pe spectre de frecvene, ar putea conduce la rezultate
incerte. De aceea, pentru rezolvarea problemelor de diagnosticare se recomand
utilizarea unor niveluri de referin de vibraii i zgomot msurate atunci cnd cutia
este recunoscut a fi n perfect stare de funcionare i care vor servi ca baz pentru
criteriile de determinare.
Analiza spectrului de frecven al zgomotului sau vibraiilor generate de cutiile
de viteze, permite att detectarea defectelor incipiente ct i diagnosticarea cauzei
defectului, ntruct pune n eviden frecvenele la care s-au produs modificri
semnificative de nivel i care pot fi corelate cu frecvenele vibraiilor generate de
defecte mecanice (dezechilibrri, cuplaje cu joc etc.).
Analiza evoluiei n timp a spectrului de frecven permite aprecierea strii
mecanice a cutiei de viteze.
Pentru identificarea surselor de zgomot i vibraii din cutiile de viteze se face o
corelare a frecvenelor corespunztoare maximelor din spectrogramele determinate
experimental, cu frecvenele surselor posibile de vibraii i zgomot calculate pe baza
parametrilor constructivi i funcionali ai cutiei de viteze.
244
Fig. 6.11
n cazul cutiilor de viteze cu roi dinate, zgomotele i vibraiile specifice
procesului de angrenare sunt modulate n amplitudine sau n frecven datorit
defectelor de concepie, execuie i exploatare i de regul genereaz n spectrul de
frecven benzi laterale de frecvene grupate n jurul frecvenelor de angrenare i a
armonicelor lor, localizate la multiplii frecvenelor de modulaie.
n diagnosticarea defectelor cutiilor de viteze cu construcie relativ complicat,
determinarea acestor frecvene de modulaie poate constitui un indiciu suplimentar i
important. n acest scop, pentru detecia periodicitilor din spectrul de frecvene al
245
cutiilor de viteze i determinarea cu precizie a frecvenei de modulaie se utilizeaz
tehnica de analiz CEPSTRUM.
n figura 6.11.a este reprezentat spectrul de frecvene la o cutie de viteze
nainte de reparaie, n care se evideniaz frecvena de angrenare (333 Hz) i
armonicile acesteia precum i benzile laterale de frecven, iar n figura 6.11.b este
dat spectrul de frecven la aceeai cutie de viteze dup reparaie, n care a aprut o
component secundar la 429 Hz.
n analiza CEPSRUM, componentele de frecventa de 40 ms i 170 ms au un
nivel ridicat indicnd frecvena de rotaie a arborelui de 8,3 Hz i respectiv a treia
armonic de 25 Hz. Modulaia de 8,3 Hz a rezultat ca urmare a dezaxrii arborelui,
care a fost corectat n timpul reparaiei, iar a treia armonic a rezultat n urma unei
uzri neuniforme a flancurilor roii dinate printr-un rodaj excesiv n timpul
fabricaiei.
Dup reparaie, componenta de 40 ms a disprut, iar componenta de 170 ms s-a
redus datorit inversrii pinionului pe arbore, n scopul angrenrii pe flancul opus.
Pentru a studia posibilitile de diagnosticare oferite de analiza CEPSTRUM,
n Catedra Organe de Maini din Universitatea Tehnic Gh. Asachi Iai au fost
realizate cercetri de diagnosticare vibroacustic pe cutia de viteze a mainii de alezat
i frezat.
Fig. 6.12
Iniial, au fost nregistrate spectrele de frecvene i analiza CEPSTRUM, de
referin, pe cutia acceptat ca fiind n condiii corespunztoare de funcionare, n
care pot fi identificate frecvenele de angrenare ale roilor dinate cuplate precum i
armonicele acestora (fig. 6.12).
n continuare a fost introdus o roat dinat cu btaie radial, n lanul
cinematic al cutiei de viteze analizate, ceea ce a produs modificri ale spectrului de
frecven la frecvena de angrenare i armonicele acesteia i respectiv n analiza
CEPSTRUM, la frecvena de rotaie a roii, de 10,55 Hz (fig. 6.13).
246
Fig. 6.13
Prezena rotii defecte n lanul cinematic studiat, din cutia de viteze, a
modificat nivelul global al zgomotului cu numai 3 dB, de la 79 dB(A) la 82 dB(B).
Aceast cretere arat c s-a modificat starea de funcionare a cutiei de viteze,
fr s pun n eviden cauza acestei modificri.
n spectrul de frecvene, vrful corespunztor frecventei de angrenare de 253,3
Hz care este generat de roata analizat a crescut cu 20,5 dB fa de nivelul de
referin, iar n analiza CEPSTRUM, amplitudinea ramonicei 1 de 94,7 ms, care
corespunde frecvenei de modulaie de 10,55 Hz, egal cu frecvena de rotaie a roii
studiate, a crescut de aproximativ 3 ori fa de nivelul de referin.
n spectrele de frecven ale zgomotului generat de cutia de viteze dup
introducerea roii excentrice, de o parte i alta a frecvenei de angrenare i
armonicelor acesteia, se pot observa benzi laterale de frecven generate de btaia
roii dinate.
Pentru a separa convenabil benzile laterale este necesar s se fac analiza de
frecven cu filtre cu limea de band mai mic cu un ordin dect distana minim
dintre benzile laterale.
Se constat experimental c un numr mare de factori (raportul semnal/zgomot,
limea de band i factorul de form al filtrelor, distana dintre benzile laterale etc.)
influeneaz valorile CEPSTRUM i de aceea trebuie s se compare numai analize
CEPSTRUM obinute n condiii identice.
Avantajul analizei CEPSTRUM, n comparaie cu analiza de frecven
obinuit, rezid n sensibilitatea sporit a acesteia i simplificarea interpretrii
rezultatelor experimentale, ntruct n CEPSTRUM, vrfurile periodice din spectrul
de frecvene sunt cumulate.
247
6.3. Diagnosticarea rulmenilor
6.3.1. Consideraii generale
Pentru rulmeni, considerai separat, nivelul de vibraii i zgomot este unul
dintre indicatorii globali de calitate, reflectnd eficiena tehnologiilor specifice de
finisare i montare.
n funcionare, nivelul de zgomot i vibraii al rulmenilor montai se coreleaz
cu starea lor de defectare, indicnd prezena, eventual mrimea defectelor i
permind intervenii pentru evitarea accidentelor.
n rulmeni, generarea vibraiilor i zgomotului are urmtoarele cauze:
modificarea poziiei corpurilor de rulare n zona ncrcat a rulmentului
determin modificarea poziiei contactelor i a ncrcrilor, realiznd
modificarea periodic a rigiditii contactelor i sistemului, cu favorizarea
apariiei vibraiilor de tip parametric;
micarea neuniform a corpurilor de rulare, ca urmare a solicitrilor diferite n
funcie de poziie, conduce la frecri i ciocniri ale corpurilor de rulare cu
inelele sau colivia;
realizarea contactelor cu rostogolire pe suprafee cu abateri dimensionale de
form i poziie (diferene de diametre, btaie frontal sau radial a cilor de
rulare, excentricitate, ovalitate, poligonalitate, ondulaii, rugozitate);
deplasarea corpurilor de rulare peste impuriti plasate pe suprafeele de
contact, peste defecte sau deteriorri localizate (ciupituri de tip pitting, uzur
abraziv, amprente etc.)
Diagnosticarea rulmenilor prin zgomot i vibraii poate fi realizat n scopul:
cercetrii fenomenelor dinamice din timpul funcionrii;
controlului tehnologic al rulmenilor sau utilajelor de rulmeni pentru evaluarea
nivelului global de precizie dimensional, de form i poziie al construciei
interioare n cazul rulmentului separat sau montat n dispozitive i standuri
speciale. Dac rulmentul este montat ntr-un ansamblu, ncercarea poate urmri
i calitatea montajului (precizia dimensional, de form i poziie), pe lng
calitatea de execuie a rulmentului;
monitorizarea utilajelor cu rulmeni; rulmentul montat ntr-un ansamblu poate
fi diagnosticat n legtur cu starea lui de deteriorare.
6.3.2. Diagnosticarea pentru studiul fenomenelor dinamice
Pentru studiul fenomenelor dinamice din rulment, acesta se monteaz separat
pe un stand, cu caracteristici ridicate de sileniozitate sau ntr-o camer anecoid cu
frecven limit inferioar de max. 250 Hz.
Antrenarea arborelui pe care se monteaz rulmentul pe inelul interior, se face
din exterior, cu motor electric sau turbin de aer. Datorit nivelului redus de zgomot,
248
diagnosticarea prin zgomot a rulmenilor montai ntr-un ansamblu care conine i alte
surse, de regul mai mari, prezint dificulti nsemnate.
n cazul msurrii vibraiilor, traductorul de vibraii poate fi aezat direct pe
inelul exterior sau pe carcase de studiu montate pe acesta.
Cercetrile experimentale realizate n scopul diagnosticrii fenomenelor
dinamice din rulmeni au evideniat urmtoarele aspecte mai importante:
principala cauz a zgomotului i vibraiilor rulmenilor o constituie deplasarea
corpurilor de rulare pe ci de rulare cu abateri dimensionale, de form i
poziie, cu neregulariti etc.
ntre nivelul de zgomot i nivelul de vibraii al aceluiai rulment, msurat n
aceleai condiii exist o corelaie evident ndeosebi n cazul analizei globale
sau a analizei de frecven cu band larg (1/3 oct);
tipul i dimensiunile rulmentului influeneaz zgomotul i vibraia; astfel, un
rulment protejat i etanat, uns cu unsoare consistent are un nivel de vibraii
cu 3-4 dB mai redus, dect un rulment deschis, uns cu ulei; rulmenii cu bile
sunt mai silenioi dect rulmenii cu role (5-10 dB);
sarcina nu influeneaz substanial nivelul de zgomot i vibraii, cu excepia
sarcinilor axiale impuse pentru anularea jocurilor din rulmeni;
viteza de rotaie are o influen mare asupra nivelului de zgomot i vibraii,
influen care crete o dat cu frecvena;
ntre ungerea cu unsoare consistent i ungerea cu ulei nu au fost sesizate
diferene relevante; fa de un rulment neuns, ungerea reduce totui nivelul
global de vibraii cu 3 13 dB i respectiv, 10 24 dB la 10 kHz i nivelul de
zgomot cu 4 5 dB, n banda 0.6 1 kHz i cu 8 22 dB n banda 2-7 kHz;
montarea rulmentului ntr-o carcas moale produce o reducere a nivelului de
zgomot i vibraii (la turaii pn la 6000 rot/min, cu 6 dB), iar montarea ntr-o
carcas cu strngere de 25m produce o reducere de peste 10dB.
Analiza n domeniul timp sau frecven a semnalului emis de rulmeni a permis
evidenierea unui numr nsemnat de vrfuri semnificative, corelate cu urmtoarele
frecvene specifice cinematicii i dinamicii rulmenilor:
frecvena de rotaie a inelului interior: | | Hz
60
n
f
i
=
frecvena de rotaie a coliviei fa de inelul exterior fix:
|
|
.
|
\
|
= cos
d
D
1
120
n
f
m
w
ce
frecvena de rotaie a coliviei fa de inelul interior n rotaie:
|
|
.
|
\
|
+ = cos
d
D
1
120
n
f
m
w
ce
frecvena de rotaie a corpurilor de rulare fa de inelul exterior fix:
249
(
(
|
|
.
|
\
|
=
2
m
w
w
m
be
cos
d
D
1
D 120
d n
f
unde: n este turaia arborelui i a inelului interior;
D
w
diametrul corpului de rulare;
d
m
- diametrul mediu al rulmentului;
- unghiul de contact.
Poziia vrfurilor n spectrul de frecven a rulmentului n funcie de natura
defectului este dat n tabelul 6.2.
Tabelul 6.2
Element Tipul abaterii geometrice Poziia vrfului n spectrul de
frecven , Hz
Btaie radial f
i
Ondulaie
i ci
pf mZf
Inel interior
Defect singular(pitting)
i ci
pf mZf
Inel exterior Ondulaie
Defect singular (pitting)
ce
mZf
Variaia de diametru
ce
mf
Ondulaie
ce be
pf mf 2
Corp de rostogolire
Defect singular
ce be
pf mf 2
cu m=1,2,3, , p=0,1,2,3,.. , Z=nr. corpurilor de rulare.
La aceste frecvene ale armonicelor excitaiei se mai poate aduga i frecvena
care corespunde succesiunii intrareieire a corpului de rostogolire din defecte
singulare:
(
(
|
|
.
|
\
|
=
2
m
w m
be
cos
d
D
1
b 2
d n
f
unde b este lungimea defectului pe circumferina cii de rulare.
Se observ n primul rnd numrul mare de componente detectabile, fapt care
subliniaz dificultile unei interpretri i identificri corecte.
Fig.6.14
250
n figura 6.14 este prezentat spectrul de frecven a unui rulment radial cu
defecte pe inelul interior. n afara vrfurilor dependente de turaie, analizele efectuate
au evideniat i vrfuri specifice unor rezonane, independente de turaie ca poziie n
spectrul de frecven. La aceste frecvene se mai adaug i urmtoarele frecvene:
-armonicele i subarmonicele frecvenei de rotaie a arborelui:
i
mf sau f
i
/m
(cu m ntreg i pozitiv), ndeosebi la turaii mai mari de 3000 rot/min.;
-armonicele i subarmonicele frecvenei de rotaie a coliviei: mf
ce
sau f
ce
/m;
-frecvenele proprii ale arborelui sau coliviei.
Analiza spectrului de frecven, n scopul diagnosticrii sau monitorizrii
presupune determinarea prin calcul a tuturor frecvenelor enumerate.
n scopul simplificrii analizei se recomand:
utilizarea analizei CEPSTRUM, innd seama de numrul mare de armonice;
filtrarea frecvenelor armonicelor date de rotaia arborelui;
separarea frecvenelor dependente de turaia arborelui de cele independente;
utilizarea tehnicilor de discriminare a amplitudinii vrfurilor din spectru.
Coincidena dintre frecvenele msurate i evidente ca vrf de amplitudine i
frecvenele calculate poate oferi date cu caracter de diagnostic.
6.3.3. Diagnosticarea rulmenilor n fluxul tehnologic
Diagnosticarea prin vibraii sau zgomot n fluxul tehnologic se recomand n
vederea obinerii unei indicaii globale asupra preciziei de execuie i a eficienei
operaiilor de splare, ndeosebi pentru rulmenii de dimensiuni mici i mijlocii
destinai unor sisteme silenioase, vibraii reduse sau uniformitate n rotire.
Diagnosticarea prin vibraii este, de regul, de preferat datorit simplitii
operaiei i n acest scop rulmenii de controlat se monteaz cu inelul interior pe un
arbore n rotaie, care la rndul su este montat pe lagre silenioase.
Msurarea se face sub o sarcina de control radial sau axial.
Analiza semnalului n raport cu o referin considerat acceptabil, urmrete;
nivelul global de vibraie n dB;
nivelul de vibraie n benzi de frecven relativ largi;
nivelul de vibraie n banda ngust de frecven, n timp real;
analiza n timp a semnalului.
Evoluia n timp a semnalului generat de rulment, ofer, pe baza unei etalonri
prealabile, numeroase elemente calitative i cantitative de diagnostic cum ar fi:
dispunerea aleatorie a semnalului cu amplitudini medii reduse, fr vrfuri
semnificative, corespunde unei excitaii prin rugozitate i ondulaii considerate
la niveluri normale (fig. 6.15.a);
suprapunerea peste semnalul de fond, descris mai nainte, a unor vrfuri
echidistante n timp, cu periodicitate bine definit, n concordan cu viteza de
parcurgere a contactelor, indic prezena pe cile de rulare a unor defecte
localizate (fig. 6.15.b);
251
defectele localizate pe cile de rulare determin apariia unor vrfuri de semnal
cu periodicitate relativ, datorit micrii neuniforme a corpurilor de rulare
(fig. 6.15.c);
vrfuri similare, dar cu poziie i amplitudine variabile sunt determinate de
impuriti, praf, particule abrazive rmase pe suprafeele de contact dup
splare (fig. 6.15.d);
a) c)
b) d)
Fig. 6.15
Raportul dintre amplitudinea vrfurilor maxime i amplitudinea vibraiilor,
considerate ca uniforme pe ecranul osciloscopului, reprezint factorul de vrf n
domeniul timpului i este considerat ca un indice de calitate.
Controlul i diagnosticarea tehnologic se pot aplica i rulmenilor montai pe
utilaje, cu traductorul de vibraie plasat ct mai aproape de rulmentul controlat, dar
apar dificulti n interpretarea corelaiilor dintre vibraie sau zgomot i defectele
tehnologice ale rulmenilor, ntruct n spectrul de frecven pot s apar i vrfuri
dependente de condiiile de montaj sau funcionare.
6.3.4. Diagnosticarea rulmenilor n funcionare
n vederea prevenirii unei deteriorri brute a rulmentului, cu consecine n
defectarea altor elemente ale utilajului n funciune, se recomand controlul i
monitorizarea n funcionare (rulmeni pentru lagre mari, roi de autovehicole etc.).
n acest caz se prefer controlul prin vibraii, cu aparatur mobil sau fix cu
prelevri de date la intervale determinate de timp, sau n mod continuu, cu informaie
pentru un singur punct de control, sau pentru mai multe, concomitent sau prin
multiplicare. Cea mai simpl metod o constituie utilizarea sondei acustice, aezat
ct mai aproape de rulmentul controlat.
Sonda transmite prin contact direct aparatului auditiv vibraiile captate prin
contact direct, oferind astfel informaii cu caracter subiectiv asupra strii rulmenilor.
Pentru controlul, monitorizarea, diagnosticarea obiectiv a semnalului de
vibraie, se recomand ca traductorul de vibraii s fie plasat ct mai aproape de zona
252
ncrcat a rulmentului analizat, pentru a asigura un traseu direct undei elastice ctre
traductor.
Aprecierea strii rulmentului prin nivelul global de vibraii, ofer indicaii
imediate, cu costuri reduse, cu condiia existenei unei etalonri prealabile, care s
localizeze vibraia captat de traductor i s permit excluderea de interpretare a unor
defectri din structura mainii.
Analiza n domeniul timp, beneficiind de asemenea de avantajele unei aparaturi
simple, ofer posibilitatea detectrii defectelor, prin vrfurile poziionate periodic n
timp, pentru defectele de pe corpurile de rulare.
Analiza n domeniul frecven evideniaz de regul, vrfuri, a cror poziie
este determinat de prezena defectelor pe cile de rulare sau corpurile de rulare.
Creterea deteriorrilor pe cile de rulare determin o cretere a spectrului de
frecven n domeniul 1kHz100kHz; determinnd i o cretere a factorului de vrf.
Particulele de contaminare (particule metalice de uzur, praf etc.) i fac
prezena prin modificri ale spectrului att n zonele frecvenelor de excitaie, ct i
pe ntreg spectrul de frecven.
Efectul defectelor de suprafa produse prin oboseala de contact, ca i al
particulelor de contaminare pe ntreg spectrul de frecven se explic prin condiiile
de microoc n care se realizeaz contactul pe defecte sau particule.
Impulsul de oc acioneaz ca un impuls treapt cu componente pe ntreg
domeniul de frecven. Cercetrile experimentale au artat c domeniul de frecven
audio al rulmenilor este aglomerat de numeroase frecvene greu de separat i explicat
care aparin att rulmenilor cu defecte, ct i celor fr defecte, n timp ce domeniul
de frecven cuprins ntre 50200 kHz este caracteristic unor defecte prin pitting, n
acest domeniu rulmenii fr defecte nu produc modificri semnificative.
Pe baza acestor observaii a fost conceput oc-pulsmetru, cu traductor de
vibraii cu frecven de rezonan de 32 kHz i cu domeniul dinamic care s asigure
un raport de 1000 ntre semnalul specific unui rulment cu pitting i semnalul unui
rulment fr defect.
n raport cu un nivel de referin, determinat pentru fiecare turaie, s-au stabilit
urmtoarele domenii pentru diagnosticare:
0-20 dB - indic condiii bune de funcionare, rulmeni fr defecte;
20-35 dB - funcionare nrutit, care necesit o analiz a cauzelor;
35-65 dB - defecte vizibile, durabilitate sczut, necesit nlocuirea
rulmenilor.
O metod apreciat este metoda energiei de vrf care utilizeaz rezonana
traductorului pentru amplificarea semnalului n domeniul ultrasonic.
Aceast metod folosete traductori cu frecven de rezonan de 2535 kHz i
un filtru suplimentar trece sus, peste 15kHz.
Pentru defecte incipiente, mici zgrieturi, sunt recomandai traductori cu
rezonan la 80120 kHz i filtre electronice adecvate acestor frecvene.
Atunci cnd rulmenii funcioneaz ntr-un ansamblu n care sunt ocuri de
contact (angrenaje, supape etc.) sau fenomene de cavitaie sau turbulen, detecia
defectelor rulmenilor n domeniul ultrafrecvenelor este adesea dificil.
253
6.4. Diagnosticarea lagrelor cu alunecare
Dei lagrele cu alunecare, ca surse de zgomot i vibraii, sunt neglijabile n
construcia mainilor i utilajelor mecanice, acestea pot determina o perturbaie
suplimentar n funcionarea lanurilor cinematice, de regul, cu efect secundar i
reprezint o cale important de transmitere a energiei de vibraii la carcas.
n cazul lagrelor cu alunecare, zgomotul i vibraiile generate n timpul
funcionrii sunt determinate n principal de frecare.
Alimentarea insuficient cu lubrifiant a lagrului, suprancrcarea acestuia sau
inversarea sensului de rotaie a fusului conduc la micorarea peliculei de lubrifiant i
apariia fenomenului de arcu, care produce un zgomot al crui spectru prezint
vrfuri la o frecven egal cu frecvena de rotaie a arborelui. Lagrele de alunecare
cu joc radial mare genereaz n spectrul de zgomot i vibraii vrfuri evidente i la
subarmonicele frecvenei de rotaie a fusului f
1
(f
1
/2 , f
1
/3).
La mainile cu turaii ridicate poate s apar o instabilitate a peliculei de
lubrifiant care are ca efect o cretere a nivelului de vibraii, cu componente spectrale
dominante la frecvene subarmonice egale cu (0,43 0,48)f
1
.
Lagrul capt o comportare instabil mai ales atunci cnd aceste frecvene
coincid cu una dintre frecvenele proprii ale arborelui.
Cnd arborele se rotete cu o frecven dubl fa de frecvena critic, apare de
asemenea o funcionare instabil ntuct, n acest caz, procesele parazite generate de
funcionarea lagrului se manifest cu frecvene apropiate de cea critic.
n scopul reducerii nivelului de vibraii i zgomot generate de lagrele cu
alunecare se recomand:
Fig. 6.16
6.5. Diagnosticarea transmisiilor prin lan
Transmisiile prin lan produc vibraii i zgomot n funcionare datorit:
efectului poligonal i funcionrii neuniforme;
angrenrii cu oc a zalelor cu dinii roilor de lan;
impreciziei de execuie a roilor de lan (bti radiale sau frontale, erori de pas
sau profil etc.) sau a lanului ;
asigurarea unei ungeri corespunztoare;
modificarea turaiei arborelui n vederea evitrii
funcionrii la turaia critic sau la dublul
acesteia;
n cazul unor sarcini mari, variabile ca direcie
sau mrime, se vor utiliza lagre radiale cu mai
multe zone portante, pentru a evita ruperea
filmului de lubrifiant i pierderea stabilitii
fusului;
echilibrarea arborelui cu reperele ce se monteaz
pe acesta pe lagrele proprii.
254
variaiei mrimii i sensului cuplului transmis.
Frecvena excitaiilor periodice create de aceste cauze perturbatoare este egal
cu frecvena de angrenare a zalelor cu cele dou roi de lan:
60
n . z
k
60
n . z
k f
2 2 1 1
a
= = [Hz] , n care:
- n
1
i n
2
sunt turaiile celor dou roi, n rot/min;
- z
1
i z
2
sunt numerele de dini ale celor dou roi de lan;
- k=1,2, ordinul de mrime al armonicelor, generate de aceste cauze
perturbatoare. n diagnosticarea transmisiilor prin lan trebuie considerate i
frecvenele proprii ale celor dou ramuri ale transmisiei sau ale elementelor
componente ale acesteia, care prezint un spectru larg, corespunztor numrului de
grade de libertate ale acestora.
Fig. 6.17
sarcini dinamice suplimentare reduse se recomand mrirea preciziei de execuie a
lanului i a roilor de lan, micorarea distanei dintre axe, realizarea unei ntinderi
optime a lanului determinat experimental i evitarea fenomenului de rezonan.
6.6. Diagnosticarea transmisiilor prin curele
Zgomotul transmisiilor prin curele este generat de variaia forelor de frecare la
alunecarea relativ a curelei pe roi, prin fenomene aerodinamice i la curele cu
mbinri, prin trecerea mbinrii peste roile de curea.
Dei zgomotul produs de transmisiile prin curele este, n general redus, se pot
face i aici recomandri cu privire la:
asigurarea unei ntinderi optime;
folosirea unor curele placate cu material plastic sau cauciuc;
utilizarea de roi de curea din materiale nemetalice care au capacitatea mare de
amortizare a vibraiilor;
utilizarea curelelor trapezoidale n locul curelelor late care au un nivel de
zgomot mai redus.
Roile de antrenare defecte produc n spectrul de frecven componente
armonice cu frecvena de rotaie a roii i armonicele acestora, iar cureaua defect
genereaz vrfuri n spectru la frecvena:
n fig.6.17 este prezentat un spectru
tipic al zgomotului generat de o transmisie
prin lan. Vrful din spectru notat cu 1
corespunde frecvenei de angrenare, vrfurile
2, 3 i 4 cu armonicile acesteia, iar vrfurile A
i B din spectru corespund frecvenelor
proprii ale roilor de lan i arborilor pe care
sunt montate acestea.
Pentru realizarea de transmisii prin lan
cu nivel redus de vibraii i zgomot i deci cu
255
L
x . v
f
c
= unde: v - reprezint viteza curelei; x - numrul de roi de curea;
L - lungimea curelei.
Cureaua defect poate fi detectat cu ajutorul unui stroboscop, prin fixarea
imaginii.
6.7. Diagnosticarea transmisiilor prin came
n cazul transmisiilor cu came folosite mai ales la mainile-unelte automate i
la utilaje din industria textil, apariia zgomotului exagerat este legat de producerea
unor ocuri la revenirea n contact a tachetului cu cama, dup acceleraii mari,
datorit unor pofile necorespunztoare dinamic. Nivelul zgomotului datorat acestor
cauze crete o dat cu creterea turaiei.
Pentru micorarea forelor de inerie se recomand ca elementele componente
s fie executate din materiale uoare, iar pentru a asigura frecvenele proprii ridicate,
elementele transmisiei trebuie s fie ct mai rigide.
6.8. Diagnosticarea mainilor electrice rotative
Zgomotul generat n funcionare de mainile electrice rotative poate fi produs
prin aciune mecanic, aerodinamic sau magnetic.
Zgomotul mecanic este determinat de dezechilibrul pieselor mainii aflate n
micare de rotaie, de eforturile dinamice variabile n timp, care apar n lagre n
cazul execuiei i a montajului necorespunztor, de vibraia periilor la mainile
electrice cu colector etc.
Zgomotul periilor depinde de calitatea periilor i a suprafeelor de alunecare,
de modul de ghidare n suporii port-perii, de presiunea periilor pe suprafaa de
contact, precum i de fenomenul de comutaie.
Nivelul zgomotului produs de perii crete odat cu mrirea turaiei i a
numrului de lamele colectoare.
n spectrul de frecvene al zgomotului generat de perii apar componente
armonice ale frecvenei fundamentale care se calculeaz cu relaia:
f
1
= nz/60 (6.1)
-unde: n este turaia, n rot./min.; z reprezint numrul lamelelor colectoare.
Zgomotul aerodinamic este cauzat de circulaia forat a aerului de rcire n
interiorul mainii datorit ventilatorului i a rotorului, de rezonana aerului din
golurile i orificiile rotorului i statorului mainii i are un caracter armonic, frecvena
componentei fundamentale calculndu-se cu relaia (6.1), n care z reprezint
numrul de palete ale ventilatorului, pentru zgomotul generat de ventilator, sau
numrul de crestturi ale rotorului pentru zgomotul generat de rotor.
Zgomotul magnetic este specific mainilor electrice i se datoreaz forelor
magnetice periodice din ntrefierul mainii electrice, forelor magnetomotoare sau
cmpurilor magnetice parazite.
256
Nivelul zgomotului magnetic poate crete mult dac frecvena unghiular a
cmpurilor magnetice parazite este egal cu frecvenele armonice ale cmpului
principal, ca de exemplu n cazul motoarelor asincrone.
Frecvena vibraiilor produse de cmpurile magnetice parazite este egal cu
dublul frecvenei unghiulare a cmpului magnetic.
Forele magnetice alternative parazite apar n cazul n care statorul nu este
circular, rotorul nu are o simetrie axial sau nu este centrat i creeaz vibraii
suplimentare. Crestturile rotorului produc un zgomot magnetic avnd caracter
armonic, frecvena componentei fundamentale f
1
se calculeaz cu relaia (6.1), n
care prin z se va nota numrul de crestturi ale rotorului.
Nivelul zgomotului crete foarte mult n cazul n care frecvena proprie a
elementelor polare sau a poriunii dintre dou crestturi coincide cu frecvena f
1
.
Zgomotul magnetic are n spectrul de frecven vrfuri la frecvena
fundamental egal cu frecvena reelei electrice (50Hz) i o serie de armonici ale
acesteia. Nivelul zgomotului produs de mainile electrice rotative crete o dat cu
creterea puterii i a turaiei. Suprapunerea tuturor surselor de vibraii n cazul
motoarelor electrice conduce la apariia unui spectru larg de fore i momente
perturbatoare. Cercetrile experimentale privind nivelul excitaiilor care apar la
motoarele trifazate cu rotor n scurt circuit, avnd puterea n domeniul 0,6 7,5 kW
au artat c spectrul de frecven care prezint interes este cuprins ntre 16 i 530 Hz.
Acelai domeniu se poate considera i n cazul n motoarelor de curent
continuu utilizate la acionarea mainilor i utilajelor mecanice.
Msurile de reducere a zgomotului mainilor electrice rotative urmresc, n
principal, reducerea zgomotului la surs, precum i micorarea radiaiei acustice n
mediul nconjurtor. Zgomotul mecanic poate fi redus printr-o echilibrare static i
dinamic a rotorului, prin utilizarea lagrelor cu alunecare n locul celor de
rostogolire, prin prelucrarea corespunztoare a colectorului i prin alegerea unei
presiuni optime a periilor pe colector.
Reducerea zgomotului magnetic se poate obine prin nclinarea crestturilor
rotorului, micorarea ntrefierului, prin realizarea unor bobinaje simetrice.
La motoarele asincrone, zgomotul magnetic se poate reduce prin utilizarea de
rotoare cu crestturi dublu nclinate. Eliminarea forelor magnetice radiale se poate
realiza prin adoptarea unui numr par de crestturi pentru rotor.
Dei reducerea intensitii cmpului magnetic prin micorarea curentului de
excitaie contribuie la reducerea zgomotului, aceast msur implic o mrire a
gabaritului motorului, la aceeai putere. Pentru evitarea rezonanei mecanice n
funcionarea mainii trebuie mrit rigiditatea acesteia pentru a obine frecvene
proprii ridicate. Zgomotul aerodinamic poate fi redus prin micorarea rezistenei
aerodinamice a reelei de ventilare. n acest scop se vor realiza forme aerodinamice
pentru orificiile radiale de ventilare n stator sau rotor, se vor utiliza ventilatoare cu
palete aerodinamice, vor fi evitate din construcia mainii coturile i trangulrile
jetului de aer de rcire, fiind prevzute piese aerodinamice de dirijare a aerului.
Pentru evitarea formrii de rezonatori acustici, golurile i orificiile existente n
rotorul i statorul mainii electrice de turaie ridicat, se vor umple cu material
257
fonoabsorbant. n cazul mainilor electrice de turaie ridicat se vor utiliza rotoare de
diametru mic, urmrindu-se n acelai timp micorarea rezistenei aerodinamice, o
reducere important a nivelului de zgomot obinndu-se prin folosirea de atenuatoare
de zgomot la canalele de admisie i evacuare a aerului (eficiente pentru frecvene mai
mari de 300Hz). Micorarea radiaiei acustice a mainilor electrice de mare putere se
poate realiza i prin utilizarea unor carcase fonoizolante i fonoabsorbante, care
trebuie s asigure i o rcire corespunztoare a mainii.
6.9. Diagnosticarea transformatoarelor
n cazul transformatoarelor, zgomotul este generat n principal de vibraiile
miezului datorit magnetostriciunii care depinde de inducia magnetic i de
parametrii fizici i structurali ai tolelor.
Nivelul zgomotului poate s creasc i la strngeri necorespunztoare ale
miezului, cnd fluxurile transversale produc modificarea cmpului magnetic n
straturile miezului, n mbinri, genernd fore periodice i vibraii ale acestora, a
cror amplitudine depinde de neuniformitatea tolelor, de construcia mbinrilor, de
calitatea asamblrii etc.
Fluxurile transversale apar din cauza variaiilor locale ale permeabilitii
magnetice, a variaiilor de grosime i a abaterilor de la planeitate a tolelor, care
conduc la saturaii locale. De asemenea, fluxurile transversale apar i n zonele de
mbinare ale coloanelor cu jugurile, datorit ntrefierurilor care se formeaz.
Zgomotul produs de vibraiile transversale ale tolelor este amplificat de
fluxurile de dispersie ale transformatoarelor, care apar la funcionarea n sarcin
asimetric. La aceste aciuni se adaug forele magnetice longitudinale care se
exercit n tole n zona ntrefierurilor. Frecvena fundamental a vibraiilor provocate
de magnetostriciune sau de fluxurile de dispersie este egal cu dublul frecvenei
reelei de alimentare, n spectrul de frecven, evideniindu-se i armonicele acesteia.
n afara acestor influene, trebuie considerat i rezonana mecanic a
elementelor cuvei sau a miezului.
La transformatoarele mari apar i alte surse de zgomot nepermanent, cum sunt
ventilatoarele, pompele de ulei, comutatoare de reglaj sub sarcin etc.
Pentru micorarea zgomotului produs de magnetostriciune este necesar
micorarea induciei n coloane i juguri, utilizarea tablelor omogene avnd grosime
uniform, fr ondulaii, asigurarea unei asamblri i strngeri corespunztoare a
circuitului magnetic. Atenuarea zgomotului produs de transformator se poate realiza
prin aezarea acestuia pe reazeme vibroizolante, prin utilizarea de bariere
fonoabsorbante n interiorul cuvei, prin carcasarea fonoizolant i fonoabsorbant.
6.10. Diagnosticarea ventilatoarelor
Zgomotul ventilatoarelor reprezint o sum de componente determinate de
fenomenele fizice care nsoesc funcionarea ventilatoarelor.
258
Cele mai importante procese sunt cele aerodinamice, mecanice i
electromagnetice, iar zgomotele care nsoesc aceste fenomene se numesc
,,aerodinamice , ,,mecanice i ,,electromagnetice.
n zgomotul electroventilatorului se deosebete zgomotul propriu ventilatorului
i zgomotul elctromotorului de antrenare. Zgomotul produs de ventilator este o
combinaie ntre zgomotul aerodinamic i cel mecanic, n timp ce zgomotul
electromotorului este o combinaie a celor trei componente.
Zgomotul aerodinamic este determinat de pulsaiile de vitez i presiune ale
aerului n timpul funcionrii ventilatorului.
Componenta de baz a zgomotului aerodinamic este produs de vrtejurile
(turbioanele) care apar la trecerea curentului de aer printre paletele ventilatorului i ca
urmare a curgerii aerului prin canalele difuzoarelor, formate de aceste palete.
Intensitatea zgomotului produs de vrtejuri depinde de dimensiunile i forma
corpurilor pe lng care are loc curgerea i de viteza curentului de aer.
Formarea de vrtejuri are loc chiar n condiii optime de curgere n jurul
corpului i se amplific mult la cele mai mici abateri fa de condiiile optime.
Puterea acustic a zgomotului generat de vrtejuri poate fi evaluat cu relaia:
2
2
6
2
3
D u
c
k W =
unde: k este un coeficient care ine seama de forma geometric a elementului n jurul
cruia are loc curgerea, de unghiul de afluen, de valoarea numerelor M i Re; c este
viteza sunetului;
Frecvena fundamental a zgomotului produs de vrtejuri la curgerea aerului n
jurul unei plci de lungime l, dispus sub un unghi fa curentul de aer, se poate
calcula cu relaia: i
sin l
v
Sh f
v
=
unde: Sh este numrul Stronhal (pentru plci: Sh = 0,18 0,2);
i = 1,2,3 reprezint ordinul armonicii.
ntruct unghiul de atac i viteza se schimb continuu n lungul paletelor,
rezult c zgomotul aerodinamic generat de palete va avea frecven variabil, ceea
ce creeaz un spectru continuu de frecvene ntr-o band larg de frecvene.
A doua component a zgomotului aerodinamic este generat de curgerea
neomogen a aerului pe lng elementele fixe i are frecvena fundamental f
1
dat de
relaia (6.1), n care z reprezint numrul de palete ale rotorului, iar n este turaia
acestuia. Zgomotul generat de neomogenitatea curentului de aer este predominant la
ventilatoarele axiale care au la admisie dispozitiv director.
O component important a zgomotului aerodinamic este creat de pulsaiile
de vitez i presiune n cazul unei curgeri turbulente ale aerului, acest zgomot fiind
inevitabil. Evaluarea aproximativ a nivelului de zgomot creat de curgerea turbulent
se poate face cu relaia:
v lg 50 L
T
[dB]
La viteze de curgere de v = 20 100m/s rezult un nivel de zgomot de 65100dB.
259
Sursele productoare de zgomot prin aciune aerodinamic sunt create de
curgerea laminar sau turbulent a aerului prin orificii sau de-a lungul unor suprafee
fixe sau mobile. n acest caz intensitatea zgomotului produs depinde de forma
geometric a orificiilor, conductelor sau suprafeelor prin care are loc curgerea
aerului, de viteza aerului, de debitul i vscozitatea cinematic a acestuia.
Zgomotul aerodinamic poate avea n spectrul de frecven o component
predominant, fiind asemntor zgomotului de ,,siren sau poate avea un spectru de
frecvene continuu, n cazul unei curgeri turbulente a aerului.
n general, zgomotul produs de ventilatoare are dou componente principale: o
component de rotaie i o component turbionar.
Turbulena curentului de aer genereaz turbioane de dimensiuni i micri
aleatorii determinnd un zgomot cu spectru larg.
n funcie de curbura paletelor, ventilatoarele centrifuge pot fi realizate cu
palete curbate nainte (fig. 6.18.a) , napoi (fig. 6.18.b) sau radiale(fig. 6.18.c)
a) b) c)
Fig. 6.18
Ventilatoarele cu palete curbate nainte realizeaz o vitez i o turbulena mai
mare a aerului i deci au nivel mai mare al zgomotului turbionar, n special n
domeniul frecvenelor nalte, ntruct, au numr mai mare de palete.
Ventilatoarele cu palete curbate napoi genereaz un zgomot aerodinamic de
frecven joas i de intensitate mai mic, ntruct viteza relativ a aerului este mai
redus, iar numrul de palete este mai mic dect la ventilatoarele cu palete curbate
nainte. Paletele radiale genereaz un zgomot cu nivel cuprins ntre nivelul
zgomotului generat de paletele curbate nainte i nivelul zgomotului produs de
paletele curbate napoi. La ventilatoarele axiale, nivelul zgomotului turbionar crete
odat cu creterea grosimii bordului de fug al paletelor.
Zgomotul aerodinamic produs de toate ventilatoarele crete n cazul n care
exist coturi la intrarea i ieirea din carcasa acestora, suprafee cu muchii ascuite,
obstacole n punctele de admisie sau de evacuare a aerului, sau n cazul unui profil
necorespunztor al paletelor.
Dac gradientul de presiune pe suprafaa paletelor este cresctor, pe partea
convex a paletei se pot desprinde vrtejuri, care genereaz zgomotul turbionar cu un
spectru de frecven de band larg. Aceste fenomene pot fi reduse la minim, dac se
utilizeaz palete cu bordul de fug curbat. Zgomotul ventilatorului poate fi amplificat,
n cazul n care apare rezonana carcasei ventilatorului sau a conductelor de admisie
sau evacuare. Zgomotul ventilatorului depinde de presiunea static, de vitez, debit i
diametrul rotorului. Cmpul acustic generat de ventilator este neuniform, mai ales n
cazul ventilatoarelor mari. Ventilatoarele axiale funcioneaz la turaii ridicate i din
aceast cauz produc nivele ridicate ale zgomotului n domeniul frecvenelor nalte.
260
Ventilatoarele axiale cu palete profilate au un nivel acustic cu 23dB mai
redus n cazul unui regim de funcionare optim.
Dac se utilizeaz palete directoare la intrarea n rotorul ventilatorului, fluxul
de aer devine neomogen, ceea ce provoac o cretere a nivelului de zgomot cu
aproximativ 6dB. Reducerea zgomotului aerodinamic al ventilatoarelor axiale se
poate realiza prin:
adoptarea unor profile aerodinamice optime pentru toate suprafeele care intr
n contact cu fluxul de aer i n special pentru suprafeele paletelor;
mrirea numrului de palete, ceea ce poate s determine o reducere a nivelului
de zgomot cu 58dB;
micorarea dimensiunilor obstacolelor din calea fluxului de aer, care trebuie s
aib o form aerodinamic;
tratarea carcasei ventilatorului cu material fonoabsorbant;
micorarea vitezei periferice a rotorului prin alegerea corespunztoare a
parametrilor instalaiei de ventilare;
alegerea unor valori optime pentru unghiul de atac al paletelor, n scopul
reducerii la minim a formrii turbioanelor n zona bordului de atac al acestora;
micorarea vitezei de curgere a aerului, prin alegerea corespunztoare a
seciunii de trecere prin conducte i grilele instalaiei de ventilare.
ntruct zgomotul aerodinamic conine un numr mare de componente
spectrale, acestea pot excita carcasa ventilatorului sau conductele de admisie sau
evacuare, la rezonan, contribuind la creterea nivelului de zgomot.
Apariia fenomenului de rezonan poate fi evitat prin izolri vibroacustice
exterioare. n cazul conductelor, se prefer izolarea acustic interioar, ntruct se va
reduce att zgomotul produs de curentul de aer ct i vibraia conductei.
Analiza caracteristicilor acustice ale ventilatoarelor a artat c nivelul cel mai
redus al puterii sonore a zgomotului generat de ventilator corespunde regimurilor
nominale de funcionare a acestora, la un randament maxim al ventilatorului.
Pentru debite mai mari sau mai mici dect cel nominal, se produce o cretere a
nivelului puterii sonore pn la 58 dB, n domeniul de lucru al ventilatoarelor.
Ventilatoarele centrifuge, de regul, au un spectru continuu de frecven al
puterii sonore, cu o evideniere clar a componentelor spectrale discrete
corespunztoare frecvenei de rotaie a paletelor i armonicele superioare ale acesteia.
Spectrul continuu este determinat de zgomotul generat de vrtejuri i de
zgomotul stratului limit care apare la curgerea pe lng paletele rotorului i pe lng
peretele carcasei, fiind determinat de pulsaiile de presiune n stratul limit i n
zonele de rupere. Componentele discrete ale zgomotului produs de ventilator sunt
generate de neuniformitatea curentului de aer datorit numrului finit de palete ale
rotorului i prezenei carcasei spirale i n special a limbii care nu asigur o
funcionare simetric a ventilatorului pe circumferina rotorului. Nesimetria
ventilatorului centrifug conduce la inegalitatea puterii sonore radiate prin orificiile de
aspiraie i refulare. Aproape la toate ventilatoarele, nivelul puterii sonore a
zgomotului radiat pe partea de refulare este n medie cu 26dB mai mare dect
nivelul de zgomot radiat pe partea de aspiraie.
261
Reducerea zgomotului aerodinamic produs de curgerea turbionar n canalele
ventilatorului axial se poate realiza i prin montarea unor turbionatori pe suprafaa
conului de absorbie sau n canale, care fac ca punctul de curgere a aerului s se
deplaseze n afara marginilor paletelor, ceea ce are ca efect o diminuare a turbulenei
aerului i o reducere a zgomotului cu 515dB. n cazul ventilatoarelor cu palete
radiale nclinate nainte, montarea turbionatorilor determin o reducere a nivelului de
zgomot cu 1520dB, reducere care se poate evalua cu relaia:
5 / 1
3
2 4
p
Q n
200 L
=
unde: n reprezint turaia, n rot/min; Q-debitul, n m
3
/s; p-presiunea, n N/m
2
.
Pentru mbuntirea comportrii acustice a ventilatoarelor se recomand ca la
proiectarea acestora s se ia i urmtoarele msuri:
s se adopte o form aerodinamic, pentru forma elementelor constructive
dispuse n curentul de aer;
s se asigure o profilare continu a elementelor de intrare ale ventilatorului;
obstacolele care nu pot fi nlturate din curentul de aer, la ventilatoarele axiale
i echicurent, vor fi dispuse pe ct posibil mai departe de rotor;
aparatul director, la intrarea ventilatoarelor axiale, mrete zgomotul i pentru
mbuntirea comportrii acustice a acestuia, se recomand ca numrul
paletelor sale s fie ct mai diferit de numrul de palete ale ventilatorului;
pentru acionarea ventilatorului se va folosi un electromotor cu zgomot minim;
Ventilatoarele centrifuge n echicurent sunt mai silenioase dect ventilatoarele
cu carcas spiral. Se recomand utilizarea amortizoarelor de tip activ.
Turbionatorii pot produce o reducere a presiunii realizat de ventilator,
reducere care poate fi compensat prin mrirea diametrului D al rotorului sau prin
creterea turaiei n.
Reducerea componentelor discrete la ventilatoarele radiale cu 1020dB se
poate face prin utilizarea paletelor nclinate, ceea ce produce i o micorare a
nivelului global al zgomotului cu 515dB.
Unghiul optim de nclinare al paletelor este de 15
o
.
Reducerea zgomotului turbionar i de rotaie al ventilatoarelor centrifuge se
poate realiza prin:
micorarea vitezei periferice a rotorului, prin alegerea corespunztoare a
parametrilor instalaiei de ventilare sau prin utilizarea unor ventilatoare de
turaie mic;
realizarea unor profile aerodinamice optime pentru suprafeele de curgere a
aerului. Paletele trebuie s aib bordul de fug rotunjit;
alegerea unor valori optime pentru unghiul de atac al paletelor, pentru reducerea
la minim a formrii turbioanelor n zona bordului de atac al paletelor;
micorarea vitezei de curgere a aerului prin alegerea corespunztoare a seciunii
de trecere prin conductele i grilele instalaiei de ventilare;
funcionarea ventilatorului la randament maxim;
262
reducerea numrului de palete i utilizarea unui numr par de palete.
6.11. Diagnosticarea motoarelor cu ardere intern
Un motor cu ardere intern este o structur complex care este excitat att de
fore create de procesul de combustie ct i de fore determinate de organele
motorului aflate n micare.
Procesul de ardere, determin presiuni cu variaie rapid n timp i de aceea
acioneaz ca o surs principal de vibraii. Spectrul de frecvene al presiunii din
cilindru este influenat de o serie de factori, dintre care cei mai importani sunt: tipul
sistemului de ardere, sistemului de injecie, ciclul de lucru al motorului, parametrii de
regim ai motorului.
Sistemul de ardere.
Spectrul presiunilor din cilindrul pentru motoarele cu injecie direct (ID) i
cele cu injecie indirect (II) este aproape identic, existnd o diferen major numai
n ceea ce privete frecvena oscilaiilor presiunii, care pentru sistemul ID este n jur
de 5000 Hz fa de 2000 Hz la sistemul II, fenomen care este atribuit modurilor
naturale de vibraie diferite ale gazului n camerele de ardere. Forma camerei de
ardere are o deosebit influen asupra amortizrii oscilaiilor, lucru pus n eviden
de forma vrfului din zona frecvenelor nalte a spectrului frecvenelor.
Sistemul de injecie.
Creterea avansului injeciei determin o cretere att a valorii presiunii n
poriunea iniial a spectrului, ct i a amplitudinii vrfului n zona frecvenelor
iniiale. O injecie gradat determin o micorare a amplitudinii vrfului de spectru n
raport cu o injecie rapid.
Ciclul motorului.
Pentru o aceeai putere, ciclul n doi timpi funcioneaz cu un nivel mai ridicat
a componentelor cu frecven joas pn la armonica cinci, dup care nivelul
spectrului generat de ciclul cu doi timpi devine mai mic cu pn la 6dB fa de cel
generat de ciclul n patru timpi.
Parametrii de lucru.
ntruct diagrama presiunii din cilindru i menine aproximativ aceeai form
i mrime pe ntreg domeniul de turaii, prin dublarea turaiei se nregistreaz numai
o deplasare spre dreapta a spectrului, fr o modificare semnificativ a formei
acesteia.
Pentru frecvene de pn la 100 Hz creterile presiunii din cilindru se identific
cu frecvena de rotaie i cu jumtate din valoarea acesteia, n timp ce la frecvene
mai mari, pn la 800 Hz, diagramele indic o tendin general de cretere a
nivelului presiunii cu turaia, corespunztor unei rate de 90 db/decad.
n cazul uni motor diesel cu timp de injecie constant, sarcina influeneaz n
foarte mic msur spectrul presiunii din cilindru.
Pentru un motor cu distribuie tip pomp de injecie, n lipsa sarcinii, spectrul se
apropie de cel al unui motor cu aprindere prin scnteie nregistrnd i reducerea cu
circa 10 dB n zona frecvenelor nalte.
263
Excitaia de natur mecanic.
Excitaiile determinate de impactul supapelor cu scaunele, sau de pompa de
injecie, au o evoluie n timp foarte apropriat de cea a forelor derivate din procesul
de ardere i vor prezenta n consecin spectrul de form similar, dei au
amplitudini mai mici. Se detaeaz dintre aceste fore cea determinat de btaia
pistonului, care este o excitaie de tip impact, determinat de schimbarea sensului
forei ce acioneaz asupra pistonului pe o direcie perpendicular pe axa cilindrului.
Acest fenomen se produce n cazul motoarelor cu ardere intern de construcie
clasic, n apropierea P.M.E i P.M.I.
Creterea jocului dintre piston i cilindru determin o cretere sensibil a
nivelului de vibraie i zgomot. Creterea mrimii alezajului motorului determin o
cretere a jocului piston cilindru i a masei pistonului rezultnd i o cretere rapid
a forei de lovire, astfel nct, la motoarele foarte mari, aceste fore de lovire a
pistonului de pereii cilindrului devin predominante n raport cu forele generate de
ardere. Creterea vitezei pistonului determin o cretere a forei de impact, spectrul
nregistrnd o cretere n amplitudine.
n cazul motoarelor, spectrul de zgomot prezint amplitudini apreciabile n
domeniul frecvenelor nalte ceea ce indic existena unei importante surse de vibraii
n acest domeniu.
Efectul unor parametrii de proiectare asupra caracteristicilor vibraiilor.
Principial, motoarele pot fi: n linie, sau boxer.
Principala deosebire ntre cele dou construcii se afl n modurile de vibraii
de ncovoiere n domeniul frecvenelor joase.
a)Influena numrului de lagre paliere.
Sprijinirea arborelui pe un numr mai mare de lagre paliere are ca rezultat
creterea frecvenei fundamentale de ncovoiere.
Astfel, n cazul unui motor cu patru cilindri sprijinit pe trei lagre paliere,
modul fundamental pentru vibraiile de ncovoiere este situat n domeniul 400 800
Hz, n timp ce pentru un motor cu aceeai cilindree i numr de cilindri, dar la care
exist cinci lagre paliere, domeniul de frecvene al modului fundamental este 800
1000 Hz.
O influen mai pregnant o are modul de rezemare a arborelui cotit asupra
vibraiei pereilor carcasei.
Vibraiile capacelor motorului.
S-a constatat c n mod obinuit capacele constituie sursa predominant a
zgomotului emanat de motor i c o reducere apreciabil a zgomotului motorului se
poate realiza printr-o mbuntire a calitii capacelor. Capacele turnate din aluminiu
sau font realizeaz o atenuare mai mare dect capacele ambutisate din tabl de oel.
Zgomotul radiat de motor.
Procesul de ardere acioneaz ca o excitaie, ca urmare a creterii rapide a
presiunii, ceea ce induce vibraii tranzitorii n ntreaga structur a motorului, care se
propag ctre suprafeele exterioare.
264
Amplitudinea maxim a zgomotului emis de structura unui motor diesel ca
urmare a unei excitaii sinusoidale de amplitudine constant, se nregistreaz n
domeniul 1000 2000 Hz, care este tipic pentru motoarele auto cu structura de baz
din font turnat.
n cazul motoarelor cu dimensiuni mari, amplitudinea maxim a rspunsului se
nregistreaz la frecvene mai joase. Creterea nivelului spectrului presiunii din
cilindru, prin creterea vitezei, determin o cretere a nivelului de zgomot cu 30
dB/decad, similar cu panta spectrului presiunilor.
Reducerea zgomotului produs de motoare se poate realiza prin:
reducerea amplitudinii forelor determinate de procesul de ardere, sau de cauze
mecanice n domeniul de frecven important din punct de vedere acustic;
modificarea cilor de transmitere a acestor fore prin introducerea de amortizri
adiionale sau prin rigidizarea structurii motorului.
6.12. Diagnosticarea mainilor unelte
6.12.1. Surse de vibraii i zgomot la mainile-unelte
Procesul de prelucrare pe maini-unelte este nsoit ntotdeauna de vibraii,
care influeneaz negativ, n primul rnd precizia dimensional i de form a
suprafeelor generate, calitatea suprafeei prelucrate, durabilitatea sculei achietoare,
nivelul de vibraii constituind un factor de limitare a productivitii mainii-unelte.
Sursele de vibraii i zgomot la mainile-unelte achietoare pot fi legate direct
de specificul construciei mainii, sau de procesul de achiere (fig. 6.19).
Mainile-unelte moderne sunt structuri dinamice complexe, avnd n
componena lor: transmisii prin roi dinate, lanuri, lagre cu alunecare sau
rostogolire, mecanisme cu came, cuplaje, echipamente hidraulice, electrice i
pneumatice etc.
Datorit complexitii structurale, diagnosticarea prin vibraii i zgomot la
mainile-unelte este dificil, i pentru simplificarea operaiilor de identificare a
surselor de vibraii i zgomot se pot grupa elementele n diverse combinaii
funcionale ale mainii (motoare de acionare, lanul cinematic sau de avans, sistemul
de ungere etc.) dup care se studiaz vibrograma.
Problemele legate de diagnosticarea surselor de vibraii specifice organelor de
maini ale mainilor-unelte au fost abordate n cursurile precedente. n continuare vor
fi analizate numai sursele de vibraii dependente de procesul de achiere.
Vibraiile forate generate de procesul de achiere sunt determinate de
urmtorii factori:
variaia seciunii achiei la prelucrarea suprafeelor ntrerupte sau a
semifabricatelor cu adaos de prelucrare variabil;
variaia vitezei de achiere, sau a direciei de avans la mainile de copiere;
neuniformiti ale micrii principale de avans;
variaia duritii materialului prelucrat etc.
265
Soluia constructiv
Dimensionarea
Precizia de execuie i montaj
Parametrii funcionali
Amortizare din sistem
Form
Parametrii geometrici
Modul de fixare
Form
Dimensiuni
Modul de fixare
Parametrii sistemului
elastic
Parametrii procesului
de achiere
Procesul de frecare
Defazajul dintre
for i deplasare
Fig. 6.19
Aciunea simultan a acestor factori determin o excitaie a sistemului cu un
pronunat caracter aleator, ponderea excitaiilor aleatoare fiind comparabil cu cea a
excitaiilor periodice, ceea ce creeaz multiple posibiliti de apariie a fenomenului
de rezonan. Frecvenele excitaiilor periodice pot s coincid cu frecvena de rotaie
a arborelui principal, cu frecvena de intrare n achie a tiului frezei, cu frecvena de
angrenare etc.
Autovibraiile care apar n procesul de achiere au urmtoarele cauze mai
importante:
a) Ineria procesului de achiere se manifest printr-o ntrziere a variaiei
forei de achiere n raport cu variaia poziiei relative pies - scul, ceea ce creeaz
un exces de energie dup fiecare perioad de oscilaie a sistemului elastic, cu
favorizarea apariiei de autovibraii. Efectul este cu att mai important cu ct viteza
de achiere este mai mic, capacitatea de deformare plastic a materialului de
prelucrat este mai mare i cu ct grosimea achiei este mai mare.
b) Vibraiile regenerative explic apariia autovibraiilor la achiere pe baza
efectului produs de ondulaiile suprafeei prelucrate la trecerea anterioar, ondulaii
ce regenereaz fore dinamice perturbatoare n sistem. Se constat experimental c
vibraiile regenerative la achiere apar ntotdeauna atunci cnd limea achiei
depete o valoare limit caracteristic pentru un anumit material de prelucrat i
Dependente de
construcia mainii
Surse de vibraii i
zgomot la mainile
unelte
Dependene de procesul
de achiere
Dependente de
scul
Dependente de
semifabricat
Autovibraii
266
pentru anumite condiii de achiere date. Prezena efectului de regenerare are ca
urmare variaia frecvenei vibraiilor autoexcitate n funcie de turaie.
Scderea turaiei determin o scdere a frecvenei vibraiilor autoexcitate.
c) Dependena neliniar a forei de achiere de viteza de achiere
Caracteristica descresctoare a forei de achiere, poate conduce la apariia de
vibraii autoexcitate, mai ales la prelucrarea materialelor tenace cu viteze de achiere
relativ mici (V
as
< 70 - 80 m/min.). Aciunea acestui factor perturbator nu poate fi
neglijat n cazul sistemelor dinamice ale mainilor-unelte slab amortizate ca i n
cazul n care frecvenele proprii de vibraii ale structurii elastice sunt relativ ridicate
(f > 200 Hz).
d) Procesul de frecare poate genera autovibraii datorit dependenei dintre
fora de frecare i viteza de alunecare din lanurile cinematice. Atunci cnd
deplasarea elementelor mobile ale mainilor unelte se realizeaz cu vitez mai mic
dect o vitez critic, se obine o micare periodic n salturi, fenomen cunoscut sub
denumirea de stick-slip. Autoviraiile realizate n urma deplasrii cu viteze sub cea
critic, numite i autovibraii de relaxare, pot fi atenuate prin alegerea
corespunztoare a cuplului de materiale, ungerea raional, descrcarea suprafeelor
de contact etc.
Vibraiile autoexcitate apar numai n timpul procesului de achiere la frecvene
asociate frecvenelor proprii ale structurii mainii.
S-a stabilit experimental i prin calcul c frecvena autovibraiilor este apropiat
de frecvena proprie a sistemului elastic al mainii-unelte, fr a fi egal cu ea i fr
s fie dependent de frecvena de rotaie a elementelor din lanurile cinematice ale
mainii unelte. Frecvenele posibile ale autovibraiilor se pot determina aproximativ,
stabilind prin calcul sau experimental frecvenele proprii ale sistemului elastic.
Apariia n procesul de achiere a unor vibraii avnd frecvena egal cu
frecvena proprie a sistemului elastic poate fi datorat fenomenului de rezonan, fr
ca procesul de achiere s fie instabil.
Un fenomen caracteristic vibraiilor autoexcitante l constituie creterea n timp
a amplitudinii care poate conduce la apariia trepidaiilor.
6.12.2. Msuri pentru mbuntirea comportrii dinamice a mainilor-
unelte
Comportarea dinamic a mainilor-unele n procesul de achiere poate fi
mbuntit prin :
alegerea adecvat a regimurilor de achiere;
adaptarea unei construcii optime din punct de vedere al rezervei de stabilitate;
alegerea unei scule achietoare corespunztoare ;
aplicare unor msuri constructive care s conduc la creterea rezervei de
stabilitate dinamic a structurii elastice a mainii unelte prin:
- utilizarea amortizoarelor de vibraii;
- modificarea frecvenelor proprii ale structurii;
- orientarea convenabil a direciilor modurilor proprii de vibraii etc.
267
ntruct vibraiile autoexcitate sunt influenate n special de regimul de
achiere, pentru eliminare acestora trebuie modificai n primul rnd parametrii
procesului de achiere.
Atunci cnd nu sunt impuse restricii de calitate a suprafeei prelucrate, se
poate evita apariia autovibraiilor prin utilizarea unor avansuri mari.
Se constat experimental c intensitatea autovibraiilor la achiere scade o dat
cu creterea avansului la prelucrarea pieselor de rigiditate mic i rmne practic
constant n cazul pieselor cu rigiditate mare.
n privina adncimii achiei determinrile experimentale au evideniat o
cretere puternic a forei dinamice de achiere F
d
, odat cu creterea adncimii
achiei, deci adncimea achiei are o influen negativ asupra rezervei de stabilitate
a sistemului dinamic al mainii unelte. Creterea adncimii achiei n cazul strunjirii
exterioare a determinat o cretere puternic a amplitudinii autovibraiilor aprute la
pragul de stabilitate dinamic, frecvena autovibraiilor rmnnd practic constant.
Pentru a asigura stabilitatea sistemului dinamic al mainii-unelte se recomand
utilizarea unei valori reduse ale adncimii achiei, iar pentru a compensa pierderile de
productivitate se va mri avansul.
Variaia forei dinamice de achiere F
d
n funcie de viteza principal de
achiere pune n eviden domeniu critic de viteze (20 75 m/min) pentru care
intensitatea autovibraiilor crete i care corespunde cu domeniul de viteze favorabile
depunerii adaosului aderent, fenomen care determin o cretere a capacitii de
excitare a sistemului dinamic al mainii-unelte. Pentru viteze superioare domeniului
critic, aciunea vitezei de achiere devine stabilizatoare.
Din punct de vedere al rezervei de stabilitate dinamic a mainii-unelte, viteza
de achiere trebuie s aib valori ct mai mari.
Pentru stabilizarea procesului de achiere este necesar evitarea formrii
achiilor de rupere i a depunerilor pe ti prin alegerea corespunztoare a
regimurilor de achiere i prin folosirea de scule cu geometrie raional.
n acest sens, mrirea unghiului de degajare are ca efect o micorare a
intensitii vibraiilor, valoarea maxim admis fiind determinat de durabilitatea
sculei. Reducerea unghiului de achiere realizeaz o atenuare a vibraiilor.
n cazul strunjirii exterioare mrirea unghiului de atac realizeaz o scdere
brusc a amplitudinii vibraiilor.
O reducere sensibil a intensiti vibraiilor se obine prin utilizarea cuitelor cu
faete (o,1 0,3 mm).
n general vibraiile autoexcitate pot fi eliminate prin mrirea rigiditii i
amortizrii structurale a mainii.
6.12.3. Studiul comportrii dinamice a mainilor-unelte prin teste de
prelucrare
Comportarea dinamic a mainilor-unelte se poate determina pe baza unor teste
de prelucrare care se stabilesc n aa fel nct s existe posibilitatea unui control
riguros al parametrilor de influen asupra procesului de achiere i meninerea
268
acestora la o valoare constant. Metoda permite determinarea capacitii de ncrcare
a mainii, cu evidenierea caracteristicilor dinamice ale acesteia.
Aceast metod se bazeaz pe faptul c trecerea de la o prelucrare stabil la
una instabil are ca efect o cretere important a nivelului de vibraii.
Pentru calificarea procesului de achiere se msoar vibraia mecanic,
meninnd traductorul de vibraii n apropierea zonei de achiere.
Introducerea analizorului n lanul de msurare permite determinarea spectrului
de frecvene, ceea ce permite s se stabileasc dac vibraiile sunt autoexcitate sau
forate. Experimentul trebuie fcut pentru prelucrri cu scule multiple, sau pentru
achiere ntrerupt.
Principalul inconvenient al testelor de prelucrare pentru mainile unelte l
constituie dificila generalizare i reproductibilitate a rezultatelor ncercrilor.
6.12.4. Identificare elementelor cu rigiditate dinamic redus din
structura mainilor unelte
O problem important de diagnosticare la mainile unelte o constituie
depistarea unui element slab din punct de vedere dinamic. Ca elemente slabe
sunt definite acele elemente ale mainilor-unelte ale cror proprieti dinamice
mresc deformaia n locurile de acionare. Elementele cu rigiditate dinamic redus
pot s apar n structura de rezisten a mainilor-unelte (batiu, coloane, snii,
traverse, console) n lanul cinematic principal sau de avans, n axul principal, n
suportul sculei, n lagre i ghidaje, precum i n piesa prelucrat.
Eliminarea regimurilor de achiere cu vibraii autoexcitate se face uneori prin
mrirea rigiditii dinamice a mainilor unelte, dup un studiu de prototip realizat n
scopul localizrii precise a elementului slab.
Acest studiu se realizeaz n trei etape succesive:
a) Se determin regimul de achiere cu vibraii autoexcitate, realiznd
determinri pentru diferite regimuri de achiere i poziii ale sniilor sau
consolelor i respectiv pentru piese din materiale diferite, schimbnd poziia
i geometria sculei.
b) Semnalul generat de un traductor de vibraii montat ct mai aproape de
scul este amplificat i analizat pentru obinerea spectrului de frecvene din
care se poate determina frecvena vibraiilor autoexcitate.
c) n etapa a doua a studiului dinamic se determin rspunsul n frecven al
mainilor-unelte la excitaia generat de procesul de achiere sau la o
excitaie dinamic generat de un vibrator electrodinamic comandat de un
generator de semnal.
Deoarece excitarea simultan n mai multe puncte n scopul izolrii complete a
unui mod de vibraii, este dificil, se prefer excitarea absolut ntr-un singur punct
a sculei sau piesei, prin utilizarea unui singur vibrator montat pe o direcie ct mai
aproape de direcia forei rezultante maxime de achiere.
269
Msurnd vibraiile orizontale, verticale i de rsucire, se determin funciile
de rspuns n frecven sub forma unei diagrame receptan-frecven i faz-
frecven sau ca diagram polar, din care se pot identifica frecvenele de rezonan.
Excitnd maina-unealt cu diverse niveluri ale excitaiei, se pot evalua
neliniaritile. Prin compararea frecvenelor de rezonan cu frecvenele vibraiilor
autoexcitate determinate n prima etap se gsesc modurile proprii de vibraie pentru
care structura mainii are rigiditatea dinamic minim.
d) n etapa a treia a studiului dinamic se excit structura cu frecvena acestui
mod de vibraie, pentru determinarea formei modulului i respectiv localizarea
elementului slab al structurii. n acest scop traductorul de vibraii se amplaseaz
consecutiv n diferite puncte de-a lungul componentelor principale ale mainii,
nregistrndu-se amplitudinea vibraiei i respectiv faza, fa de un semnal de
referin generat de un traductor de vibraii montat ntr-un punct al structurii.
Unind punctele n care se nregistreaz aceeai amplitudine de vibraie se pot
obine hri modale pe baza crora se pot stabili locurile de rigiditate redus.
n cazul structurilor sudate, pe baza hrilor modale se poate stabili locul de
fixare al nervurilor de rigidizare. Cnd elementele structurale sunt predominant
unidimensionale (ghidaje, traverse, coloane, montani) se deseneaz forma modului
de vibraie. Variaiile brute de pant sau discontinuiti de form indic prezena
elementului slab.
6.12.5. Diagnosticarea vibroacustic a sculelor n procesul de achiere
Diagnosticarea vibroacustic a strii de uzur a sculelor folosite n procesul de
achiere, permite aprecierea performanelor procesului de achiere n ceea ce
privete calitatea suprafeelor prelucrate i precizia lor dimensional, uzura
influennd negativ viteza de achiere, avansul i implicit productivitatea i
fiabilitatea sculei.
Monitorizarea prin vibraii a strii de funcionare a sculei, permite substaniale
economii, reprezentnd o soluie simpl mai ales n cazul unei procesri digitale
rapide a semnalului cu dispozitive specializate. Vibraiile specifice funcionrii n
condiii de uzur a sculei se dezvolt ntr-un domeniu larg de frecven ( > 50 kHz ),
n prezena unui zgomot de fond ridicat, vibraiile specifice de uzur fiind
nestaionare. n scopul diagnosticrii se recomand :
plasarea traductorilor de vibraii ct mai aproape de surs, eventual chiar pe
scul;
filtrarea trece sus a semnalului pentru a elimina componentele de frecven
joas generate de funcionarea normal a mainii;
medierea n timp a semnalului, pentru eliminarea vrfurilor nesemnificative i
evidenierea tendinelor.
270
6.13. Diagnosticarea instalaiilor hidraulice industriale
Instalaiile hidraulice industriale sunt sisteme complexe care pot avea mai
multe maini sau elemente hidraulice conectate printr-o reea de circuite pentru
circulaia lichidului. Acestea conin, de asemenea, diverse maini anexe (motoare
electrice sau termice, turbine, reductoare, ventilatoare etc.) care emit zgomote
caracteristice de origine mecanic, aerodinamic sau electric i care au fost analizate
n capitolele precedente.
Zgomotul specific instalaiilor hidraulice industriale este determinat att de
mecanismele de generare (surse mecanice i hidraulice) ct i de mecanismele de
transfer i radiaie acustic a acestora. Sursele zgomotului de origine mecanic sunt,
n principal, asociate micrii organelor mobile ale mainilor (ocurile pieselor n
micarea alternativ, dezechilibrul pieselor n micarea de rotaie, erori de fabricaie
i montaj, rezonane etc.)
Zgomotele de origine hidraulic sunt asociate unor fenomene aleatorii (curgere
turbulent n pompe, conducte i vane, fenomenul de cavitaie) a unor fenomene
periodice (zgomote generate de desprinderea periodic a turbioanelor, rezonana
volumelor de lichid etc.) sau unor micri ale organelor mobile care produc pulsaii
ale lichidului. Principalele sisteme care concur la realizarea zgomotului de origine
hidraulic sunt:
mainile hidraulice rotative sau cu micarea alternativ (turbine, pompe
centrifuge, pompe cu piston sau cu palete etc.) sau hidrostatice (motoare sau
cilindri hidraulici);
singulariti i discontinuiti de curgere a lichidului (robinei, vane, valve,
diafragme, coturi etc.) i sisteme de conducte pentru circulaia lichidului.
Diagnosticarea instalaiilor hidraulice industriale prin msurtori de vibraii sau
zgomot comport unele dificulti legate de complexitatea acestora i de
imposibilitatea izolrii i decuplrii diverselor elemente hidraulice care sunt conectate
prin conducte, linii de arbori, cuplaje etc.
6.13.1. Fenomene vibroacustice n instalaiile hidraulice industriale
Fenomenele vibroacustice au la origine micrile relative ale structurilor
mecanice i ale fluidului. Energia dezvoltat ntr-un punct al sistemului este
propagat sub form de unde (vibraii longitudinale, transversale sau torsionale),
traversnd diverse medii cu o eficacitate variabil, datorit fenomenelor de atenuare
i reflexie, energia acustic fiind n final radiat de suprafeele exterioare ale
instalaiei aflate n contact cu aerul. Studiul radiaiei acustice a unui element mecanic
din componena unei instalaii hidraulice necesit cunoaterea urmtoarelor date:
distribuia temporar a forelor de excitaie n toate punctele structurii
mecanice, care pot fi aplicate prin intermediul unor elemente mecanice sau prin
lichid (sediul fluctuaiilor de presiune care genereaz fluctuaii de fore, care
acioneaz asupra pereilor ce limiteaz fluidul );
271
rspunsul suprafeelor n contact cu aerul, care este condiionat de distribuia
geometric a maselor, de rigiditate i ntr-o anumit msur de natura
amortizrii;
gradul de radiaie al suprafeelor n contact cu aerul.
Zgomotul instalaiilor hidraulice poate fi:
zgomot aerian, care este evaluat prin msurarea presiunii acustice cu ajutorul
unui microfon;
zgomotul structural, care este evaluat prin msurarea vibraiilor structurii ntr-
un punct, cu ajutorul unui traductor de vibraii;
zgomotul hidraulic, care este generat de fluctuaiile de presiune ale lichidului i
este msurat cu ajutorul unui captor de presiune piezoelectric sau piezorezistiv,
sau cu hidrofon.
Analiza n domeniul frecven poate oferi informaii cu privire la repartiia
spectral a energiilor i deci poate evidenia mecanismele de generare i transfer.
Fig. 6.20
272
n figura 6.20 sunt prezentate, pentru comparaie, analiza n domeniul frecven
a zgomotului hidraulic (fig. 6.20.a), zgomotului structural (fig. 6.20.b) i al
zgomotului aerian (fig. 6.20.c) la o pomp centrifug, din care se observ c energia
este repartizat pe un numr mare de componente spectrale.
Problema combaterii zgomotului i vibraiilor la instalaiile hidraulice este
specific fiecrui tip de structur i ncepe cu analiza proceselor de excitaie
mecanic dup care trebuie analizate procesele hidrostatice de generare a zgomotului.
Zgomotele de origine mecanic sunt create de forele de impact i de frecare,
fluidul avnd n general un rol pasiv. Aceste zgomote sunt generate adesea de vibraia
mainilor rotative sau cu micare alternant.
Zgomotul mainilor cu micare de rotaie este, n general, dat de vibraiile de
frecven joas ale liniilor de arbori datorit dezechilibrului sau apariiei forelor de
impact i de frecare n lagre. Aceste vibraii apar la toate regimurile de funcionare,
avnd amplitudinea maxim atunci cnd frecvena de excitaie (care este n general
determinat de viteza de rotaie) coincide cu frecvena proprie a rotorului.
Zgomotul de origine mecanic al mainilor cu micare alternativ rezult din
micare relativ a diferitelor organe (biele, pistoane, arbori cotii) care poate fi
nsoit de ocuri (datorit jocului sau forelor necompensate ) i care dau natere la
vibraii de frecven ridicat.
Zgomotul hidraulic este definit ca fluctuaiile presiunii statice medii produse n
lichid i transmise prin acesta. Se disting diverse tipuri de fluctuaii de presiune care
nu pot fi separate n timpul msurtorilor cu traductori de presiune:
fluctuaii de presiune care conduc la turbulen (sau pseudozgomot) i care se
propag n sensul curgerii fluidului cu o vitez apropiat de viteza de curgere
(n general civa m/s) i cu o amortizare rapid proporional cu produsul .v
(n care este densitatea iar v este fluctuaia de vitez);
fluctuaii de presiune cu caracter acustic (sau zgomote) care se propag cu
viteza sunetului n lichid, pe distane foarte mari, cu o amortizare adesea slab,
proporionale cu produsul .c.v ( n care c reprezint viteza sunetului n lichid);
lovituri de berbec, care se propag cu o vitez egal cu viteza sunetului, dar
corespunztoare unei variaii de amplitudine foarte mari i care nu pot fi
studiate pe baza unui model acustic liniar.
Pseudo-zgomotul a fost studiat pe larg n domeniul aerodinamic.
n cazul lichidelor, msurrile efectuate n conductele conectate la mainile
hidraulice industriale nu sunt, n general, perturbate de turbulen.
Independent de natura lor, zgomotele hidraulice pot fi clasificate n funcie de
procesul care le genereaz. Mecanismele de generare pot fi :
mecanisme de generare cu caracter aleatoriu (turbulene, cavitaie);
mecanisme de generare cu caracter periodic (pulsaii de presiune datorate
micrii prilor mobile ale mainilor);
mecanisme de amplificare (rezonana volumelor i coloanelor de lichid excitate
de mecanismele precedente).
273
6.13.2. Mecanisme de generare cu caracter aleator
Zgomotul de turbulen ( pseudo-zgomotul ) este asociat unei viteze de curgere
suficient de ridicate i este dezvoltat de forele care apar n straturile limit.
Fig.6.21
Excitaiile generate de turbulen determin deci numeroase fenomene
hidroacustice i hidroelastice n interiorul instalaiilor hidraulice.
Zgomotul de cavitaie. Cavitaia este un fenomen specific instalaiilor
hidraulice, care se caracterizeaz prin apariia uneia sau a mai multor bule n lichid,
atunci cnd presiunea absolut ntr-un punct devine inferioar presiunii vaporilor
saturai (datorit vitezei locale ridicate sau turbulenei intense).
Aceste bule pot ajunge prin curgere direct n zonele de nalt presiune unde
are loc implozia lor, cu emisie de energie vibratorie care este nsoit de un zgomot
caracteristic, asemntor cu ocul de gravitaie asupra pereilor mainii.
n cele mai multe cazuri practice lichidele au gaze dizolvate care, n zonele de
presiune joas, pot fi eliberate printr-un proces de degazare care precede sau nsoete
cavitaia. Studiul spectrelor de zgomot hidraulic sau aerian, asociat sau dezvoltat de
cavitaie arat c energia este radiat ntr-un domeniu larg de frecven care ine de la
frecvenele audio joase, pn la mai multe sute de kHz, repartiia spectral fiind
determinat de fenomenele de scurt durat i impulsurile care nsoesc cavitaia.
Cavitaia n vane constituie, n general, cel mai important mecanism generator
de zgomot ntr-o van. Efectul cavitaiei se poate determina prin utilizarea unor
dispozitive care s permit laminarea curgerii (clapete, icane etc.).
n cazul turbinelor hidraulice, pentru limitarea efectelor cavitaiei este utilizat
aerul comprimat.
6.13.3. Mecanisme de generare cu caracter periodic
Zgomotul avnd caracter periodic poate fi asociat dezlipirii periodice a
turbioanelor, sau micrii organelor mobile. Dac un lichid se afl n micare relativ
n raport cu un obstacol, se pot produce desprinderi alternnd cu lipiri, dnd natere la
turbioanele Karman. Frecvena f
k
de emisie a turbioanelor este legat de viteza
relativ v a fluidului n raport cu obstacolele i mrimea transversal echivalent a
acestuia (diametrul cilindrilor, grosimea marginii de trecere):
n figura 6.21 sunt prezentate curbele
de distribuie spectral a zgomotului
hidraulic produs de curgerea apei ntr-o
conduct decuplat total de alte surse de
perturbaie. Presiunea acustic este
repartizat pe o band larg, marea
majoritate a acesteia fiind coninut ntr-un
domeniu de frecven de pn la 1000 Hz.
n zonele n care turbulena este ridicat
(supape de pompe) structura este excitat
aleator ntr-o band larg de frecven.
274
f
k
= S
t
v / D
n care S
t
reprezint numrul lui Stronhal i este egal cu aproximativ cu 0.2 pentru
cele mai multe condiii experimentale.
6.13.4. Zgomotul hidraulic asociat micrii organelor de maini
n mainile cu micare alternativ sau n pompele cu roi dinate apar pulsaii
ale presiunii datorit comprimrii brute i detentei volumelor de fluid n interiorul
mainilor. n pompele hidraulice cu pistoane, zgomotul este realizat n principal de
procesul de inversare a presiunii n canalele cilindrice ale pompelor, proces care
produce gradiente de presiune foarte importante, i deci fore excitatoare care
acioneaz asupra organelor mobile i fixe aflate n contact cu volumul de lichid
considerat. Optimizarea procesului de inversare a fost laborios studiat, dar diferitele
metode aplicate (fante progresive n platoul de distribuie, canale de compensare a
presiunii, platou rotativ) nu permit reducerea suficient a gradienilor de presiune n
tot domeniul de funcionare a mainii i determin uneori creterea nivelului de
zgomot pentru unele regimuri.
n pompele cu roi dinate, zgomotul este asociat variaiilor de presiune n
spaiul dintre dini, profilul spaiului de comprimare, precum i poziia canalului de
evacuare condiionnd coeficientul de neregularitate a debitului.
Frecvena vibraiilor i zgomotului asociate mecanismelor precedente este
determinat de viteza de rotaie i de numrul elementelor mobile (numrul de dini ai
angrenajelor, numrul de cilindri).
Variaiile de presiune sunt transmise n conducte sub form de unde acustice.
n cazul mainilor rotative, vibraiile i zgomotele periodice sunt cauzate de
trecerea paletelor prin faa unui reper fix, trecere care este nsoit de variaia
periodic a presiunii de lichid, care se suprapune peste componentele aleatoare
(determinate de turbulene sau cavitaie).
Principalele componente spectrale periodice care pot fi depistate n spectrul
zgomotului aerian sau hidraulic sunt:
frecvena de rotaie a arborelui: f
1
= n / 60 [ Hz] ;
frecvena de trecere a paletelor: f
2
= z f
1
;
armonicele frecvenelor precedente.
unde s-a notat cu z numrul de palete ale rotorului, iar cu n turaia acestuia.
Nivelul zgomotului periodic este determinat att de condiiile de funcionare
(vitez de rotaie, debit, presiune) ct i de parametrii geometrici ai mainii (traseul
canalelor, diametrul pistoanelor, profilul paletelor etc. ).
Fluctuaiile de presiune cu caracter acustic se propag, n principal, n reeaua
de conducte sub form de unde plane.
Dac reeaua de conducte conine discontinuiti (trangulri, lrgiri, deviaii)
undele emise de surse localizate produc reflexii care dau natere la unde staionare i
care pot genera fenomene de rezonan importante. Reducerea radiaiei acustice a
instalaiilor hidraulice industriale se poate realiza prin:
275
adaptarea optim a elementelor hidraulice (debitul pompelor, diametrul
canalelor i al conductelor);
eliminarea riscului de apariie a cavitaiei prin alegerea parametrilor funcionali
optimi;
reducerea turbulenelor prin mbuntirea condiiilor de curgere a lichidului
(viteze de curgere suficient de reduse, schimbri progresive de seciune, raze
de curbur suficient de mari etc.);
dispunerea zonelor de linitire a aspiraiei pompelor pentru evitarea
introducerii de cantiti masive de aer n lichid, care produc instabiliti de
curgere;
calculul prealabil al frecvenelor proprii ale structurii mecanice sau ale
coloanelor de lichid i compararea acestora cu frecvenele excitaiilor n scopul
realizrii unor modificri geometrice corespunztoare a sistemelor hidraulice,
pentru evitarea fenomenului de rezonan;
inserarea ntre sursa pertubatoare i conducte a unor elemente vibroizolante.
6.14. Monitorizarea prin vibraii
Supravegherea funcionrii mainilor i utilajelor n exploatare prin parametrii
specifici procesului de funcionare, prin vibraii, temperatur etc., conduce la sporirea
fiabilitii, a eficienei n exploatare, la reducerea costurilor de producie i
exploatare. Instalaiile sau sistemele de monitorizare sunt utilizate pentru a verifica
normalitatea funcionrii, de a detecta eventualele abateri sau defecte i de a furniza
informaii pentru decizii de oprire, pentru diagnosticare.
Aceste decizii pot fi cu caracter localizat pe o main sau utilaj sau pot fi pe un
sector sau pe toat ntreprinderea.
Funciile sistemului de monitorizare pot fi de:
protecie sau preventiv, cu oprirea automat a funcionrii, dac starea mainii
o impune;
analiz i diagnosticare, cu determinarea cauzelor modificrilor de stare.
Parametrii recomandai pentru monitorizare la maini i instalaii critice sunt:
1) n condiii de dotare minim:
vibraii;
poziia axial a arborilor;
temperatura n lagre.
presiuni, debite, vitez etc.
2) n condiii opionale sau specifice impuse:
performane de proces;
puterea;
energia acustic, emisie de impulsuri acustice;
contaminarea lubrifiantului;
debite de scpri prin etanri.
Monitorizarea poate fi plasat:
276
pe parcursul procesului tehnologic, dup montaj, pentru determinarea preciziei
de execuie a componentelor; n acest caz monitorizarea se poate face la cald,
n condiii de funcionare, sau la rece;
n timpul rodajului, n condiii de funcionare n gol sau n sarcin, n scopul
verificrii obinerii parametrilor funcionali, verificarea preciziei de execuie
sau montaj;
la pornirea mainilor noi sau a celor reparate, n scopul verificrii proiectrii, a
echilibrrii;
n timpul exploatrii curente; n aceast perioad monitorizarea se realizeaz
att prin parametrii de proces, ct i prin temperatura n lagre sau n circuitele
de ungere i rcire, prin vibraii, prin poziiile relative ale elementelor mainii.
Sisteme de monitorizare prin vibraii.
Proiectarea sistemelor de monitorizare prin vibraii se realizeaz fie odat cu
proiectarea mainilor sau utilajelor de monitorizat, fie pentru maini sau utilaje
executate, innd seama de destinaia acestuia, de performanele necesare, dar i de
amploarea i consecinele unor eventuale avarii.
Proiectarea monitorizrii trebuie s in seama de:
corelaia main - sistem de monitorizare;
necesitile de organizare i calificare specific a personalului;
dimensiunile sistemului de monitorizare;
consideraii economice.
Un sistem tipic de monitorizare perfecionat pentru maini critice, poate fi
realizat ca o combinaie ntre o instalaie de monitorizare care s asigure alarma
automatizat prin circuite electrice i electronice i un sistem automat de achiziionare i
pstrare a datelor relative la parametrii caracteristici strii de funcionare (fig. 6.22).
Fig. 6.22
Funciile componentelor modularizate ale ansamblului sunt urmtoarele:
1. Modulul de control exploreaz consecutiv toate punctele monitorizate, la
intervale de timp suficient de mici (cca 1s); rezultatele acestei explorri sunt
transferate periodic printr-un calculator de sistem ctre banca de date, pentru
277
pstrarea pe durate ndelungate, compresie de date, analiz i nregistrare grafic sau
display. Depirea limitelor stabilite declaneaz, la nivelul modului de control,
reacii automate sau comandate n vederea almrii, protecia utilajului prin oprire
etc. La comanda modulului de control sau a calculatorului de sistem, semnalul de
vibraie se transfer sistemelor de analiz (n frecven, amplitudine sau timp) i
nregistrare.
2. Calculatorul de sistem asigur la nivel de ansamblu transferul de date i de
reacii programate ntre modulul de control, sistemele de analiz i banca de date.
3.Modulul MODEM asigur dialogul i intervenia experilor la distan,
intervenind direct n funciile sistemului, obinnd sau transmind date ctre banca
de date.
Sistemul poate funciona automat sau comandat independent de modulul de
control, care beneficiaz de independen constructiv i funcional pentru
explorarea i prelevarea de date independent de funcionarea restului sistemului.
n stare de alarm, sistemul poate fi conectat pe funcionare automat sau, dac
este posibil, pe funcionare comandat, specialistul putnd studia fenomenele n timp
real sau direct. nregistrarea se poate realiza pe band magnetic, pe mai multe
canale.
Tehnica actual de monitorizare a evoluat mai mult pe linia multiplicrii
numrului de puncte de control i parametri studiai, a vitezei de analiz i mai puin
pe linia calitii i preciziei diagnosticului. Avalana de informaii obiective furnizate
de sistemul de monitorizare, afecteaz calitatea diagnozei, cu att mai mult, cu ct nu
sunt rare cazurile n care cauze diferite pot avea acelai efect i aceeai cauz s
conduc la efecte diferite.
Este de remarcat ns c simpla acumulare de date n vederea deciziei sau
diagnosticului nu este totdeauna suficient. Sunt citate cazuri n care rezultatul unei
msurri, pe un singur parametru, nu este suficient pentru aprecierea strii unui ntreg
ansamblu sau chiar a unei maini. n aceste cazuri sunt necesare interpretri statistice,
pe mai multe serii de date, de analize pe baza de date prelevate n timp.
278
7
IZOLAREA VIBROACUSTIC
A SISTEMELOR MECANICE
7.1. Consideraii generale
Vibraiile produse de maini pot avea cauze variate, unele inerente procesului
tehnologic sau principiului de funcionare al mainii, altele datorate unor inexactiti
de execuie i montaj, a uzurii etc.
Procesul tehnologic este cauza principal a vibraiilor provocate de ciocanele
de forj, concasoare, elevatoare cu cupe, site vibratoare, maini pulsatoare pentru
ncercri la oboseal etc. n astfel de cazuri nu se poate aciona asupra sursei de
vibraii, ci se construiete o fundaie care s realizeze o izolare activ pentru
protejarea instalaiilor, a cldirilor i a omului.
Principul de funcionare n cazul mainilor cu micare alternativ (motoare,
compresoare i pompe cu piston) genereaz fore periodice care produc vibraii.
n anumite cazuri aceste fore periodice pot fi anulate prin echilibrarea maselor,
realizat la construcia mainii.
O alt soluie de micorare a forelor periodice o constituie folosirea aliajelor
uoare la construcia pistoanelor i a bielelor. Forele neechilibrate produc vibraia
mainii care poate fi diminuat prin izolare antivibratorie.
Inexactitile de execuie constituie cauze de vibraii i la mainile cu micare
circular uniform: turbine, motoare, generatoare electrice etc.
Principalele surse de vibraii i zgomot radiant din cadrul mainilor i utilajelor
mecanice sunt: ciocnirile, forele variabile generate de erorile de execuie i de
montaj la organele de maini, forele electromagnetice variabile la mainile electrice
rotative, presiunea variabil determinat de procesul de compresie n motoarele cu
ardere intern, forele variabile determinate de curgerea fluidelor, rezonane mecanice
etc.
Msurile care determin mbuntirea comportrii vibroacustice a mainilor i
utilajelor pot fi :
msuri de protecie activ, care urmresc obinerea unui rspuns dinamic
redus, prin eliminarea cauzelor vibraiilor chiar la surs: mrirea preciziei de
execuie a organelor de maini, echilibrarea maselor, echilibrarea forelor,
reducerea jocului n articulaii, evitarea rezonanelor etc.
msuri de protecie pasiv, care mresc rezistena mediului la transmiterea
vibraiilor i la propagarea undelor acustice sau care reduc radiaia acustic.
279
Calea prioritar de combatere a vibraiilor i zgomotului o constituie aplicarea
msurilor de protecie activ, deoarece n cazul unui rspuns dinamic redus al
mainii:
crete durabilitatea elementelor componente (se reduce uzura elementelor
aflate n micare relativ i oboseala materialelor sau distrugerea acestora la
suprasarcini dinamice);
crete eficacitatea msurilor de protecie pasiv.
Pentru reducerea rspunsului dinamic al mainilor se folosesc n special
urmtoarele ci :
reducerea nivelului excitaiilor;
modificarea frecvenelor excitaiilor sau a frecvenelor proprii ale structurilor
pentru evitarea fenomenului de rezonan;
folosirea absorbitorilor dinamici.
Dintre msurile de protecie pasiv pentru combaterea zgomotului i vibraiilor
la maini i utilaje, cele mai utilizate metode sunt:
izolarea acustic prin carcasare ;
izolarea antivibratorie.
7.2. Izolarea acustic prin carcasare
Atenuarea zgomotului generat de maini i utilaje n funcionare se poate
realiza cu eficien ridicat prin carcasarea acestora. ncercrile experimentale au
demonstrat atenuri semnificative chiar n cazul unor structuri uoare i ieftine.
Carcasrile sunt aplicate la surse de dimensiuni reduse (1m) pn la uniti
tehnologice (motor + transmisie + compresor cu aer) cu dimensiuni mari (10 m).
Condiiile pe care trebuie s le ndeplineasc carcasele fonoizolante sunt destul
de severe i anume:
s foloseasc materiale care realizeaz o izolare acustic ridicat, au masa
redus i pre de cost sczut;
materialele s fie rezistente la intemperii, ulei, la aciuni termice etc.;
carcasa trebuie s permit ventilaia interioar pentru rcirea sau aerisirea
surselor sau receptorilor protejai, s permit intervenii uoare pentru reparaii
etc;
s prezinte o izolare fonic bun etc.
Atenuarea prin carcasare a mainilor i utilajelor cu zgomot mare n
funcionare s-a impus ca una dintre soluiile de eficien tehnico-economic.
Izolarea acustic prin carcasare este o tehnic eficient pentru atenuarea
zgomotului produs de maini, ntruct realizeaz o reducere substanial a acestuia.
Sunt astfel de reinut atenuri curente de 20 30 dB la frecvene de 1000 Hz,
performane care contureaz clar importana unor asemenea soluii.
Mrimea atenurii realizat prin carcasare depinde de gradul de nchidere al
incintei, scznd foarte repede o dat cu creterea mrimii deschiderilor (fig. 7.1).
280
Fig. 7.1
O izolare acustic foarte bun se realizeaz prin utilizarea carcaselor din
structuri compuse, cu absorbani acustici (amestecuri de cauciuc, bitum, cu material
pe baz de polimeri) care realizeaz o amortizare nalt a energiei de vibraii sau prin
utilizarea pereilor dubli.
7.3. Izolarea antivibratorie
Prin izolare antivibratorie se nelege ansamblul de msuri care se iau pentru a
mpiedica transmiterea vibraiilor de la o surs la mediul nconjurtor (izolare activ)
sau de la acesta la un echipament sensibil la vibraii (izolare pasiv).
Vibraiile generate de prile mobile ale mainilor care nu au putut fi eliminate
n faza de proiectare sau cea de execuie prin msuri de protecie activ, se transmit
prilor fixe ale acestora, i sub form de unde elastice la elementele de construcie.
Aceast transmisie poate fi redus dac ntre main i elementele cu care
aceasta vine n contact se realizeaz un cuplaj ct mai slab, prin intermediul unei
suspensii elastice.
Izolare activ Izolare pasiv
Fig. 7.2
Pentru studiul izolrii antivibratorii, maina se poate considera sub forma unui
corp rigid de mas m care este prins de fundaie (considerat imobil) printr-un
izolator de vibraii, care are elemente elastice i de disipare a energiei, fiind
caracterizat prin rigiditatea k i coeficientul de amortizare c.
Zgomotul produs de o main se
propag integral n exteriorul carcasei
dac suprafaa deschiderilor este mai
mare de 10% din suprafaa total a
pereilor carcasei.
Carcasarea produce o atenuare
mai accentuat a componentelor de
frecven nalt ale zgomotului, care
sunt de altfel i cele mai suprtoare.
281
n cazul acestui model matematic simplu, cu un grad de libertate, pulsaia
proprie a sistemului este:
st
o
f
g k
=
=
La proiectarea izolrii antivibratorie, o prim condiie o constituie evitarea
rezonanei, adic pulsaia excitaiei
o
.
n cazul n care se dorete ca factorul de amplificare A < 1 i T < 1 maina
trebuie s funcioneze la turaii ridicate, superioare turaiei critice (la care se produce
rezonana), deci sistemul main-suspensie elastic trebuie s aib o pulsaie proprie
joas, deci trebuie utilizat o suspensie elastic moale. Pentru a realiza o pulsaie
proprie joas, se poate aciona asupra rigiditii k sau asupra masei m.
Dac se consider vibraia forat, fr amortizare ( 0 = ), datorit unei
excitaii armonice, se poate scrie amplitudinea vibraiei forate:
2
o
2
o
o
o
m k
F
1
1
k
F
X
=
=
Dac reprezentm grafic variaia amplitudinii X
o
n funcie de k i respectiv
m, se observ c micorarea amplitudinii se poate realiza prin mrirea rigiditii k sau
a masei m (fig. 7.3).
a) b)
Fig. 7.3
Mrirea teoretic pn la infinit a rigiditii k nseamn o legtur rigid ntre
main i fundaie. Dac fundaia este imobil i nu poate fi micat de ctre sursa de
vibraii, legarea rigid poate fi o soluie pentru evitarea vibraiilor. Acest lucru se
poate realiza dac maina care vibreaz este mic, iar fundaia are mas mare.
282
n general ns, legarea rigid (k foarte mare) nu este o soluie de izolare
vibratorie. Dup cum rezult din fig.7.3.a mrirea masei m determin micorarea
amplitudinii X
o
. Mrirea masei m implic folosirea unui bloc de fundaie, legat rigid
de main i rezemat apoi elastic.
7.4. Structuri i materiale folosite pentru izolarea vibraiilor
Structurile sau materialele folosite pentru realizarea izolrii antivibratorii pot
aciona prin efectul de izolare a vibraiilor sau prin amortizarea acestora.
n cazul amortizrii vibraiilor are loc disiparea ireversibil a energiei mecanice
a vibraiei, ca urmare a frecrilor interne i transformarea acesteia n alte categorii de
energie: caloric, de deformaie etc. Materialele cele mai folosite n izolarea
antivibratorie sunt:
elementele elastice din cauciuc;
arcurile metalice;
alte materiale: pluta, psla, esturi presate, lemn etc.
Cauciucul este n prezent un material de baz n combaterea vibraiilor, datorit
urmtoarelor proprieti principale:
avnd un modul de elasticitate foarte mic (E=10
6
10
7
N/m
2
) cauciucul se
deformeaz mult, fiind capabil s preia prin oc un lucru mecanic de 4 ori mai
mare, dect ocul preluat de arcurile de oel;
elementele elastice din cauciuc au constante elastice foarte mici, ceea ce
permite realizarea unor pulsaii proprii coborte;
cauciucul are proprieti de amortizare ridicate, putnd disipa aproximativ
3035% din energia total a vibraiei;
cauciucul este un bun amortizor de zgomot. Viteza de propagare a sunetului n
cauciuc este de 45m/s, n timp ce n aer este de 340m/s, iar n oel de 5100 m/s.
Ca dezavantaje se pot enumera:
mbtrnirea n 5-20 ani;
pierderea proprietilor elastice prin mbtrnire sau sub influena agenilor
chimici, atmosferici etc;
dificulti de calcul datorit comportrii neliniare a cauciucului;
domeniul de temperatur redus (-20 + 70
o
C)
Una din mrimile principale care caracterizeaz cauciucul este duritatea.
Modulul de elasticitate este n funcie de duritate i de forma epruvetei.
Se numete factor de form k a unui izolator de cauciuc, raportul ntre
suprafaa ncrcat i suprafaa lateral.
Pentru un izolator cilindric de diametru d i nlime h factorul de form este:
h 4
d
h d
4
d
k
2
=
=
283
Deoarece cauciucul este puin compresibil, la deformaii mici, volumul
cauciucului rmne constant, iar deformaia volumetric
v
este nul:
0
z y x v
= + + =
unde
z y x
, , sunt deformaiile specifice pe trei direcii ortogonale.
Datorit acestui fapt, cauciucul poate s-i schimbe forma, dac este solicitat la
compresiune, numai pe seama deformaiilor laterale. Din acest motiv, izolatorii de
cauciuc trebuie s aib o form care s permit dilatarea lateral liber a acestora.
Tabelul 7.1
Nr.
crt.
Tipul
izolatorului
Solicitarea
Schia
izolatorului
Constanta elastic
Deplasarea:
- translaie;
- rotaie
Eforturile unitare
admisibile pentru cauciuc
1 Compresiune
(pentru
sarcini mari)
h
ES
k =
ES
Fh
=
Static:
2 6
ac
m / N 10 ) 5 3 ( =
Dinamic:
2 6
ac
m / N 10 ) 55 . 1 1 ( =
2 Forfecare
(pentru
frecven
joas):
h
GS
k =
GS
Fh
=
S - suprafaa de
forfecare
Static:
2 6
a
m / N 10 ) 2 1 ( =
Dinamic:
2 6
a
m / N 10 ) 5 . 0 3 . 0 ( =
3 Rsucire
h 8
GSd
k
2
=
SG d
h M 8
2
t
=
Static:
2 6
a
m / N 10 ) 2 1 ( =
Dinamic:
2 6
a
m / N 10 ) 5 . 0 3 . 0 ( =
Fig. 7.4
284
Deformaia static a unor izolator din cauciuc este cu att mai mare cu ct
coeficientul de form este mai mic. n acest scop trebuie micorat aria pe care este
repartizat sarcina i mrit aria lateral liber. Acest lucru se realizeaz prin
folosirea plcilor cu nervuri (fig. 7.4.a) sau cu guri (fig. 7.4.b).
n tabelul 7.1 sunt prezentate cele mai simple forme de izolatori de vibraii.
Arcurile de oel reprezint una din cele mai reuite soluii de izolare
antivibratorie. Datorit deformaiilor mari, ele permit realizarea de suspensii cu
frecvene proprii joase. Spre deosebire de izolatorii de cauciuc care se folosesc la
fore mici i mijlocii arcurile din oel se pot utiliza pentru cele mai variate sarcini.
ntruct amortizrile interne realizate de arcurile din oel sunt neglijabile, la
frecvene ridicate arcurile de oel produc zgomote i de aceea sunt recomandate n
cazul mainilor cu turaii sub 1500 rot/min. Calculul arcurilor folosite n protecia
antivibratorie se face pe baza relaiilor din cursul de rezistena materialelor.
Pluta se folosete sub form de plci cu grosimi uzuale de 60mm, fie ca plut
natural, fie ca plut mcinat, amestecat cu un liant. Pluta natural este elastic,
rezistent la ap i ulei i i pstreaz elasticitatea peste 40 de ani. Pluta este un bun
izolator de vibraii i zgomot.
Pentru a se evita frmiarea plutei, presiunea static admisibil nu trebuie s
depeasc 8.10
5
N/m
2
. Izolatorii de plut se folosesc la maini de turaii ridicate
(motoare electrice, turbogeneratoare).
Psla este un material mai rezistent la agenii chimici i mecanici dect pluta
sau cauciucul. Se folosete n mod curent ca strat izolator pentru amortizarea
ocurilor i ca amortizor de zgomot. Presiunile admisibile la psl sunt de ordinul
(68).10
6
N/m
2
.
7.5. Izolarea vibraiilor cu ajutorul straturilor amortizoare
Combaterea corespunztoare a vibraiilor sau reducerea zgomotului impune de
multe ori ca elementele structurale s aib o amortizare bun.
O metod pentru obinerea unei astfel de amortizri const n aplicarea unui
tratament de suprafa pentru amortizare, care face s creasc ntr-o anumit
proporie capacitatea de amortizare a structurii, prin disiparea energiei de vibraie,
datorit vscozitii, ncovoierii fibrelor i frecrilor interne, precum i a efectelor de
frecare de sub stratul amortizor.
Pentru realizarea structurilor de amortizare n cazul caroseriilor auto se
utilizeaz masticul, psla asfaltic, straturi fibroase etc.
7.6. Calculul izolrii cu covoare de cauciuc
n calculul covoarelor amortizoare, datele preliminarii sunt: greutatea G a
mainii i frecvena proprie f
o
ce trebuie realizate pe direcie vertical.
Frecvena proprie:
st
o
f
g
2
1
f
= =>
2
o
2
st
f 4
g
f
=
285
Dar :
E
h p
E S
h G
f
st
=
=
unde p este presiunea pe covor, iar E modulul de elasticitate.
Pentru covoarele din cauciuc se admite:
2
a
m
N
70 1 p = i
a
p
G
S =
Alegerea corect a soluiei de izolare antivibratorie se face n funcie de
spectrul excitaiilor pe direcie vertical care apar n funcionarea mainii, de unde
rezult valoarea maxim admisibil a frecvenei proprii f
o
a sistemului main-izolator,
care trebuie s fie inferioar frecvenei de excitaie minim.
Se recomand ca:
pentru 12 f
o
Hz s fie folosite covoare amortizoare din cauciuc;
pentru 12 f 5
o
Hz s fie utilizai suporii izolatori;
pentru 5 f
o
Hz se recomand supori izolatori cu arcuri din oel sau
fundaii speciale.
Aplicaie
O main cu masa m, avnd frecvena minim perturbatoare f
e
se aeaz pe un
covor elastic, n aa fel nct s se realizeze o frecven proprie de n ori mai mic
dect frecvena excitaiei.
S se dimensioneze izolatorii din cauciuc cunoscnd E i p .
n
f
f
e
o
= ; Dar
st
o
g
2
1
f
= =>
2
o
st
f 4
g
=
Aceast deformaie poate fi scris:
E
h p
E S
h F
st
=
= =>
p
E
h
st
= i
p
F
S =
286
BIBLIOGRAFIE
1. Anderson, E. H. ELITE-3 Active Vibration Isolation Workstation, Smart
Structures and Materials 2001.
2. Anderson, E. H. .a. Smart material actuator with long stroke and high power
output, 43
rd
AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics,
and Materials Conference, 22-25 April 2002, Denver, Colorado.
3. Broch, J. T. Mechanical Vibration and Shock Measurements, Bruel & Kjaer,
1980.
4. Badaru, E., .a. Bazele acusticii moderne, Ed. Academiei, Bucureti, 1965.
5. Bener, U. S. Active vibration control of a car body based on experimentally
evaluated modal parameters, Mechanical Systems and Signal Processing,
2001.
6. Bijan, J. P. .a. Estimation-Based Synthesis of HOptimal Adaptive FIR
Filters for Filtered-LMS Problems, IEEE transactions on signal processing,
vol. 49, no. 1, january 2001.
7. Blankenship, G. W., .a. New rating indices for gear noise based upon vibro
acoustic measurement, Noise Control Eng. J., March April, 1992.
8. Bommes, L. .a. Effects of blade design on centrifugal fan noise and
performances., Noise Control Eng. J. , 1995, jul-aug., p.91-101.
9. Brennan, M. J. .a. Experimental investigation of different actuator
technologies for active vibration control, Smart Mater. Struct., 8 (1999), p.
145153.
10. Brody, D. J., Control of broadband acoustic radiation from structures using a
piezoelectric double amplifier active-skin, Thesis submitted to the Faculty of
theVirginia Polytechnic Institute and State University.
11. Burngart, T., .a. Installation effects on fan acoustic and aerodynamic
performance, Noise Control Eng. J.,47(1), 1999, jan.-feb., p. 3-7.
12. Buzdugan, Gh. .a. Vibraii mecanice. Bucureti, Ed. Did. i Pedag., 1982.
13. Buzdugan, Gh. Vibraiile sitemelor mecanice, Ed. Academiei, 1979.
14. Buzdugan, Gh. Izolarea antivibratorie a mainilor, Ed. Academiei, 1980.
15. Buzdugan,Gh. .a. Msurarea vibraiilor, Ed.Academiei , Bucureti , 1979.
16. Cabell, R. H..a. A principal component algorithm for feedforward active
noise and vibration control, Journal of Sound and Vibration, 1999.
17. Cai, Y. Simulation on the Rotational Vibration of Helical Gears in
Consideration of Tooth Separation Phenomenon )A New Stiffness Function of
Helical Involute Tooth Pair), Journal of Mechanical Design, September, 1995.
18. Calin, S. Regulatoare automate, Editura Did. si Pedag. Bucuresti, 1976
19. Chen, M. H. .a. Active control of gear vibration using specially configured
sensors and actuators , Smart Mater. Struct. 9, 2000, p.342350.
20. Ciochina, S. .a. Sisteme adaptive, Editura Tehnica, Bucuresti, 1999
287
21. Cottet, F..a. Bazele programrii n LabVIEW, Bucureti, Ed. Matrix Rom,
1998.
22. udina, M. Noise Generated by a Vane-Axial fan with Inlet Guide Vanes,
Noise Control Engineering Journal, July-August 1992, p. 21-30.
23. udina, M. Noise Generation by Rotating Stall and Surge in Vane-Axial
Fans, Noise Control Engineering Journal, May-June 2000, p. 77-84.
24. Cumpsty, N. A Critical Review of Turbomachinery Noise, Journal of Fluids
Engineering, June 1977.
25. Darabont, A. .a. Combaterea polurii sonore i a vibraiilor, Ed. Tehnic,
Bucureti, 1975
26. DiMaggio, S. .a. Acceptance Screening of Turbomachinery Using Gearbox
Vibration Measurements, Presented At Spacecraft & Launch Vehicle
Dynamics Environments Workshop Manhattan Beach, June 20-22, 2000.
27. Dobre, C,. .a. Progrese n combaterea zgomotului tranmisiilor dinate,
Bucureti, 1975.
28. Donadon, L. V. .a. Using particle velocity sensors in active noise and
vibration control applications, The 2002 International Congress and
Exposition on Noise Control Engineering,Dearborn, MI, USA. Aug. 19-21,
2002.
29. Donald, T. .a. Local control of noise and vibration with keltrack. Friction
modifier and protector trackside application: an integrated solution, Presented
at the 7th International Workshop on Railway Noise, October, 2001.
30. Douglas, S. C.Fast Implementations of the Filtered-X LMS and LMS
Algorithms for Multichannel Active Noise Control, IEEE transactions on
speech and audio processing, Vol. 7, No. 4, July, 1999.
31. Drgan, B. Le Diagnostic vibroacoustiques des machines hydrauliques aux
pistons axiaux, Bul. I.P.Iasi, Tom XLVI(L), 2000, p. 487-492.
32. Drgan, B. Diagnostic par vibrations et bruit des boites de vitesses des
voitures, Bul. I.P.Iasi, Tom XLVI(L), 2000, p. 487-492.
33. Drgan, B. Dynamic Maximalize Criteria in Gear Boxes Designing for
Machine Tools ,Bul. I.P.Iasi, Tom XLVI(L), 2000, p. 493-498.
34. Drgan, B. Experimental Tests to Establish frequency Domain Response
of Gears Under a Harmonic Excitation; 13-th Danubia Andeia
Simposium, 26-28 sept. 1996, Slovacia
35. Drgan, B., Hagiu, Gh. Silencing Gear Transmissions by Rubber Insulation,
Simpozionul Tribologia 92, 1-3 oct.1992, Bulgaria.
36. Drgan, B., Rusu,I., Ciobanu ,B. The determination of the acoustic behavior
of the axial flow fans with irregular blades distribution, Bul. I.P.Iasi, Tom
XLVIII(LII) 2002 p. 205-211.
37. Drgan, B. Silencing Gear Transmissions by Rubber Insulation, Bul. I.P.Iasi,
Tom XLVI(L), 2000, p. 499-504.
38. Drgan, B., Trboan, F. Sound Sources Control Using Coherence
Function, Bul. I.P.Iasi, Tom XLVI(L), 2000, p. 505-508.
288
39. Drgan, B., Trboan, F., Active Noise Control of Axial Fans, The Annals
University Dunrea de Jos of Galai, Fascicle VIII, 2002, ISSN 1221-4590,
Tribology, p.76-79.
40. Drgan, B., Trboan, F., Hagiu, G.D. Aspects Concerning Ball Bearings
Vibration Diagnosis, Bul. IPI, Tom. XXXIX (XLIII), Fasc. 1-4, 1993, 17-21.
41. Drgan, B., Trboan, F.Dynamic Characteristic Identification of
Vibration Rubber Insulated Using Experimental Tests, Bul. I.P.Iasi, Tom
XLVII(LI), 2001, p. 473-478.
42. Dumitrache, I., Tehnica reglrii automate, Editura Didactic i Pedagogic,
Bucureti, 1986.
43. Economou, D. C. .a. Maximally Robust Input Preconditioning for Residual
Vibration Suppression Using Low-Pass FIR Digital Filters, Transactions of the
ASME, Vol. 124, March, 2002.
44. Elbeheiry, E. M. Effects of small travel speed variations on active vibration
control in modern vehicles, Journal of Sound and Vibration, 2000.
45. Elliott, S. J. Adaptive methods in active control, Institute of Sound and
Vibration Research, University of Southampton.
46. Elliott, S. J. Optimal Controllers and Adaptive Co Multichannel Feedforward
Control of Stochastic Disturbances, IEEE transactions on signal processing,
Vol. 48, No. 4, April 2000.
47. Eure, K. W. Adaptive Predictive Feedback Techniques for Vibration Control,
Dissertation submitted to the Faculty of the Virginia Polytechnic Institute and
StateUniversity, 1998.
48. Fisher, M. .a. Aerodynamic noise, J. Fluid Mech., vol.48, 1971, p. 593-603
49. Gafianu, M., Creu, Sp. Dragan, B. Oancea, I., Grigora, t., Controlul
vibraiilor i zgomotului, ndrumar de laborator, 1981
50. Gafianu, M., Creu, Sp., Drgan, B. Diagnosticarea vibroacustic a
mainilor i utilajelor, Ed. Tehnic, Bucureti, 1989.
51. Gafianu, M., Dragan, B. Identificarea frecvenelor proprii critice la cutiile
de viteze ale mainilor unelte, Buletinul T.C.M., Ed. Tehnic, 1986, p.119-124.
52. Gafianu, M., Drgan, B. Cepstrum Analysis of the Total Runout Fluctuance on
the Gear Noise, Bul. I.P.Iasi, 1985, p.15-18.
53. Gafianu, M., Drgan, B., Bercea, M. Diagnosticarea vibroacustica a
cutiilor de viteze cu roti dintate, Constructia de masini , vol.42, 1990, nr.10-
11-12, p.440-445.
54. Gafianu, M., Drgan, B., Trboan, F., Diagnosticarea prin vibraii a
rulmenilor pe fluxul tehnologic, Rulmeni magazin nr.1, 1993.
55. Gardonio, P. .a. A comparison of active control strategies for the reduction
of structural vibration transmission, University of Southampton, UK.
56. Gardonio, P..a. Active control of sound transmission through a double wall
containing layers of porous material,isvr, University of Southampton, UK.
57. Gheorghiu, M. Nivelul de zgomot la ventilatoarele centrifugale, Bul. tiinific
Univ. Politehnica Timioara, 1999, p. 313-316.
289
58. Giancarlo, G., Vibration of Structures and Machines. Practical Aspects,
Springer Verlag, New York, 1995
59. Grumzescu, M., Stan, A. Combaterea zgomotului i vibraiilor, Ed. Tehnic,
Bucureti, 1964.
60. Hensley, J.M., Peters,A., Chu, S. Active low frequency vertical vibration
isolation, Review of Scientific Instruments,Vol.70,Number 6, 2000.
61. Holterman, J. .a. Active Vibration Control based on Collocation, Proc. 8th
Mechatronics Forum International Conference Mechatronics, 2002 p. 1038-
1047.
62. Holterman, J. .a. Active structural elements, within a general vibration
control framework, 1st IFAC Conference on Mechatronic
Systems,Mechatronics 2000, Darmstadt, Germany, 18-20 September, 2000.
63. Howard C. Q. J. .a. Calculation of vibratory power transmission for use in
active vibration control, Journal of Sound and Vibration, 2000.
64. Howard, C. Active Isolation of Machinery Vibration from Flexible Structures.
Departement of Mechanical Engineering University of Adelaide,South
Australia ,1999.
65. Huang, D.S. J. .a. Eexperimental investigation on the active control of chairs
drives, Noise Control Eng., J. 46 (4), 1998, jul-Aug, p 139 145.
66. Jacobson, C. A. J. .a. Stability of Active Noise Control Algorithms, 74 IEEE
signal processing letters, Vol. 8, No. 3, March 2001.
67. Jae, Y. L. .a. A Simple Active Damping Control for Compliant Base
Manipulators, IEEE/ASME transactions on mechatronics, vol. 6, no. 3,
September, 2001.
68. Jose C. .a. Non-Wiener Behavior of the Filtered LMS Algorithm, IEEE
Trans.Circuits Syst. Video Technol., vol. 46, p. 11101113, Aug. 1999.
69. Kazuya, Y..a. Vibration suppression and zero reaction maneuvers of flexible
space structure mounted manipulators, Smart Mater. Struct. ,1999, p.847856.
70. Khulief, Y. A. Vibration suppression in rotating beams using active modal
control, Journal of Sound and Vibration , 2001.
71. Kikuyama, A . .a. Study of Rotational Noise Reduction for Axial Flow Fan,
JSME International Journal, series B, vol. 39, no. 3, p. 590-596, 1996.
72. Kim, S. .a. Decentralized Control for Multichannel Active Vibration
Isolation, IEEE transactions on control systems technology, vol. 9, No. 1,
January, 2001.
73. Kong, C. Design of an adaptive dynamic vibration absorber, Department of
Mechanical Engineering,The University of Adelaide, South Australia,Thesis
submitted for the degree of Master of Engineering Science, 1999.
74. Konieczuy, P..a. Design of low-noise centrifugal blowers-Part
1:Measurement and analysis procedures, p. 103-116; Part 2: Optimization
Study, Noise Control Eng. J. , 1995 jul-aug. p.117-127 .
75. Kuo, S. .a. Active noise control system with parallel on-line path modeling
algorithm, Noise control engineering journal, Nov. Dec., 1992, p. 119127.
290
76. Kuo, S..a. Adaptive Algorithms and Experimental Verification of feedback
Active Noise Control System, Noise control engineering journal, 1994, Martie
Aprilie p. 3746.
77. Lauwerys, C..a. Linear control of car suspension using nonlinear actuator
control, Proceedings of ISMA, 2002.
78. Li, Yu-Feng ,Nonlinear Motion Control in the Presence of Friction and
Mechanical Flexibility, Licentiate Thesis Mechatronics Lab Department of
Machine Design Royal Institute of Technology, Stockholm, 1999.
79. Li, Yu-Feng. High Precision Motion Control Based on a Discrete-time Sliding
Mode, Doctoral Thesis, Mechatronics Lab, Department of Machine Design,
Royal Institute of Technology, Stockholm, 2001
80. Maier, V..a. LabVIEW n Calitatea Energiei Electrice. Ed. Albastr,Cluj-
Napoca,2000
81. Memet, U. Force control of a new semi-active pieozoelectric-based friction
damper, Thesis presented to the graduate school of the Univ. of Florida, 2002.
82. Moheimani, S. O. Experimental Verification of the Corrected Transfer
Function of a Piezoelectric Laminate Beam, IEEE transactions on control
systems technology, Vol. 8, No. 4, July, 2000.
83. Mosquera, C..a. Adaptive IIR filters for active noise control, Sixth
International Congress on Sound and Vibration, 5-8 july 1999, Copenhagen.
84. Muller, R.D. Dynamische zahnkrafte und Kritische Eigenschwingun
gen. , Ind. Anz, Nr.54, 1980.
85. Neise, W..a. Free Field sound power levels of open inlet/open outlet
fans and comparison with in duet measurements, Noise Control Engineering
Journal, 1995, July August, p. 129143.
86. Nica, V. .a. Senzori i traductoare electronice, Ed. Gh. Asachi, Iai, 2001
87. O'Connell, J..a. Helicopter Cabin Noise Reduction Using Active Structural
Acoustic Control, The Boeing Company.
88. Pan, T. Absorbitori dinamici de vibraii, Ed. Tehnic, Bucureti, 1984.
89. Poterasu, V. F. Structuri si Sisteme Inteligente Adaptive. Materiale,
Dinamica, Control Editura CERMI, 2000.
90. Prajna, S. .a. Robust active control of a vibrating plate, California, NOISE-
CON 2000, December 03-05.
91. Preumont, A. Active vibration control, Universite Libre de Bruxelles,
Belgium.
92. Preumont, A. Vibration Control of Active Structures,Proc. Inst. Mech. Eng.,
1958, p 87112.
93. Quinlan, D. A., Application of Active Control to Axial Flow Fans, Noise
Control Engineering Journal, November-December 1992, p. 95-101, 1992.
94. Ramroop, G. .a. Airborne Acoustic Condition Monitoring of a Gearbox
System, Maintenance Engineering Research Group, Manchester School of
Engineering, University of Manchester, Oxford Road, Manchester, M13 9PL,
United Kingdom.
95. Randal, R. CEPTRUM analysis and gearbox fault diagnosis, Maintenance
291
Management International, No. 3, 1992.
96. Randal, R. Frequency analysis, Bruel & Kjaer, Measuring Sytems, 1977.
97. Ren, M. Z. Feedback structure-borne sound control of a flexible plate with an
electromagnetic actuator: the phase lag problem, Journal of Sound and
Vibration, 1997.
98. Rusu, I., Drgan, B., Zaharia, D., Ciobanu, B. ncercarea ventilatoarelor,
Ed.Tehnopress Iai, 2002.
99. Sangeorzan, D. Regulatoare Adaptive, Editura Militara Bucuresti, 1992
100.Smith, . .a. A broadband passiveactive sound absorption system, J.
Acoust. Soc. Am., Vol. 106, No. 5, November 1999.
101.Sommerfeldt, D. S. Multi-channel adaptive control of structural vibration,
Noise Control Engineering Journal, 1991, Sep - Oct, p. 7789.
102.Steinschaden, N. Adaptive on-line balancing and vibration control of a rigid
rotor supported by active magnetic bearings, Institute for Machine Dynamics
and Measurement, Vienna University of Technology, August 25, 1997
103.Suda, Y. .a. Study on the self-powered active vibration control, Institute of
Industrial Science, University of Tokyo, Japan
104.Sutton, J.T..a. Active control of road noise inside vehicles, Noise Control
Eng. J.42 (4), 1994 Jul Aug, p. 137147.
105.Trboan, F. Mecatronic general: sisteme, componente, transfer de
date, Ed. Gh. Asachi, Iai, 2002.
106.Trboan, F., Drgan, B., Vibration Diagnosis of Ball Bearings Inner
Race Defect Size, Bul. I.P.Iasi, Tom XLVII(LI), 2001, p. 479-484.
107.Trboan, F., Gafianu, M., Drgan, B. Metoda de analiza a strii
suprafetelor cailor de rulare a rulmentilor, Construcia de Maini, nr. 7-9
(48), 1996
108.Vipperman, J. S. .a. Active control of broadband structural vibration using
the lms adaptive algorithm, Sound Vib. 166 J (2), 1993, p 283299.
109.Wright, T. The Search for Simple Models to Predict Fan Performance and
Noise, Noise Control Engineering Journal, July-August 1995, p. 85-89, 1995.
110.Yang, D. .a. Hertzian damping, tooth friction and bending in gear impact
dynamics, ASME: j.Mech. Transmiss., Autom. Des.,1987, No.2, 189 - 196.
111.Zhang, Y..a. A novel approach to active vibration isolation with
electrohydraulic actuators, Proceedings of the ASME, 2001.
112.Zhou S. .a. Active Balancing and Vibration Control of Rotating Machinery:
A Survey, The Shock and Vibration Digest ,September 2001.
113.Harris, C., Crede, E. C. Shock and Vibration ,Handbook, 2, McGraw
Hill Book Company, 1961.
114.Raymond, D., J. Minimizing Noise in Transmissions, Machine Design,
January 8, p.143148 ,1981.
115.* * * Static and Dynamic Balancing, Second Edition, Brel & Kjr,
Application Notes.
You might also like
- Diagnosticare Prin VibratiiDocument6 pagesDiagnosticare Prin VibratiiRamona PopescuNo ratings yet
- Testarea Vibro Acustica A Unui Motor in Mediile de ProducțieDocument9 pagesTestarea Vibro Acustica A Unui Motor in Mediile de ProducțieManolache DanNo ratings yet
- Gh. Buzdugan, E. Mihailescu, M. Rades - Masurarea VibratiilorDocument268 pagesGh. Buzdugan, E. Mihailescu, M. Rades - Masurarea VibratiilorMircea Rades100% (3)
- PRINCIPIILE GENERALE AlE DIAGNOSTICARII AUTOVEHICULELORDocument6 pagesPRINCIPIILE GENERALE AlE DIAGNOSTICARII AUTOVEHICULELORDan PopescuNo ratings yet
- Analiza Simultana A Vibratiei Si A Sunetului Masinilor in Diagnosticarea VibroacusticaDocument6 pagesAnaliza Simultana A Vibratiei Si A Sunetului Masinilor in Diagnosticarea VibroacusticaAndrei CorladeNo ratings yet
- Diagnosticare VibroacusticaDocument9 pagesDiagnosticare VibroacusticaMoisii PaulNo ratings yet
- Curs1 Diagnosticare VibroacusticaDocument7 pagesCurs1 Diagnosticare VibroacusticaSergiuNo ratings yet
- Motor Electro HidraulicDocument26 pagesMotor Electro HidraulicRazvan BroNo ratings yet
- Utilizarea Ultrasunetelor La Determinarea Defectelor În Piese ForjateDocument87 pagesUtilizarea Ultrasunetelor La Determinarea Defectelor În Piese ForjateAlina DoboseriuNo ratings yet
- Intretinerea PredictivaDocument15 pagesIntretinerea PredictivaCornel NoiaNo ratings yet
- Dinamica Masinilor Cu Actiune VibrantaDocument24 pagesDinamica Masinilor Cu Actiune Vibrantayakuza4ever100% (1)
- MentenantaDocument94 pagesMentenantaPaula Diana100% (2)
- Senzori de ProximitateDocument13 pagesSenzori de ProximitateCraciun AlexNo ratings yet
- Traductoare Si SenzoriDocument52 pagesTraductoare Si SenzoriPopescu Dorel Mihai100% (2)
- Referat VibroacusticaDocument4 pagesReferat VibroacusticacostelNo ratings yet
- Zgomote Si Vibratii AtestaDocument25 pagesZgomote Si Vibratii AtestaNicorescu CatalinNo ratings yet
- Proiect Tinichigerie-VopsitorieDocument23 pagesProiect Tinichigerie-VopsitorieŢone Răzvan50% (2)
- Diagnosticare VibroacusticaDocument6 pagesDiagnosticare VibroacusticaStefan GrigoreanNo ratings yet
- Autovehiculele Si Controlul InteligentDocument57 pagesAutovehiculele Si Controlul InteligentIndianaJones2000No ratings yet
- Fise de Documentare Senzori Si TraductoareDocument28 pagesFise de Documentare Senzori Si TraductoareDaniela VladimirescuNo ratings yet
- Calcul Brat Draglina-EuDocument6 pagesCalcul Brat Draglina-EuMadalina Ioana BratuNo ratings yet
- Sisteme Dinamice - Analiza Vibro-AcusticăDocument171 pagesSisteme Dinamice - Analiza Vibro-AcusticăOldoxNo ratings yet
- Servodirectie HidraulicaDocument12 pagesServodirectie HidraulicaValentin DobreNo ratings yet
- Analiza Tensiunilor Si Deformatiilor Bratului de MacaraDocument6 pagesAnaliza Tensiunilor Si Deformatiilor Bratului de MacaraDiana AnghelacheNo ratings yet
- Vibratiile Auto DA II Stoica AlexandruDocument18 pagesVibratiile Auto DA II Stoica Alexandrualexu2007No ratings yet
- Materiale in Industria AutovehiculelorDocument180 pagesMateriale in Industria AutovehiculelorPara Cata100% (3)
- SigurantaDocument12 pagesSigurantaWlad ScutaNo ratings yet
- Instrumentatie Si Echipamente de AutomatizariDocument23 pagesInstrumentatie Si Echipamente de AutomatizariVASILE100% (1)
- Senzori de ParcareDocument14 pagesSenzori de ParcareAndrei Corlade100% (1)
- Diagnosticarea Sistemelor de Siguranta ActiveDocument13 pagesDiagnosticarea Sistemelor de Siguranta ActiveIonuț MorarNo ratings yet
- Sistemul de Franare Cu ABSDocument19 pagesSistemul de Franare Cu ABSDaniel Turcu100% (2)
- Autovehiculele Si Controlul InteligentDocument88 pagesAutovehiculele Si Controlul InteligentAlina HumitaNo ratings yet
- Sisteme Mecatronice La AutovehiculDocument14 pagesSisteme Mecatronice La AutovehiculrazvanjuvNo ratings yet
- Autovehicule HibridDocument8 pagesAutovehicule HibridRadu Antohe0% (1)
- Cap. 2 - Simboluri Si Notatii Utilizate in PneumaticaDocument12 pagesCap. 2 - Simboluri Si Notatii Utilizate in PneumaticaClaudiu RotariuNo ratings yet
- Sisteme de Prehensiune Ale Robotilor IndustrialiDocument63 pagesSisteme de Prehensiune Ale Robotilor IndustrialiSilvermix13No ratings yet
- Sistemul Cruise ControlDocument17 pagesSistemul Cruise ControlMarian SorynNo ratings yet
- M. Rades - Vibratii MecaniceDocument357 pagesM. Rades - Vibratii MecaniceMircea Rades100% (4)
- Alimentare Motoare Pas Cu PasDocument9 pagesAlimentare Motoare Pas Cu Pasbobo1992No ratings yet
- Strategii de Mentenanta CursDocument0 pagesStrategii de Mentenanta CursVeronica MateiNo ratings yet
- Ungerea Sistemelor TehniceDocument109 pagesUngerea Sistemelor TehniceCristi Iclanzan100% (1)
- Coloana de GhidareDocument39 pagesColoana de GhidareVlăduțu Iuliana GeorgianaNo ratings yet
- Indrumar Dinamica (Fara Parola)Document204 pagesIndrumar Dinamica (Fara Parola)laura2103383% (6)
- Controlul Vibratiilor Si ZgomotuluiDocument292 pagesControlul Vibratiilor Si ZgomotuluiGheorghe MironNo ratings yet
- Cazv-C1 - 09.10.2015 PDFDocument17 pagesCazv-C1 - 09.10.2015 PDFIrina YrnNo ratings yet
- Mentenanta PredictivaDocument27 pagesMentenanta PredictivaRoxana Elena100% (2)
- Primele Pagini 1Document6 pagesPrimele Pagini 1Andruh CristianNo ratings yet
- Prezentare Disertatie Vibrațiile Mașinilor Și Utilajelor Pentru Construcții. Stabilirea Unui Model Dinamic Unificat Pentru Unele Tipuri de Ciururi Și Mori VibratoareDocument23 pagesPrezentare Disertatie Vibrațiile Mașinilor Și Utilajelor Pentru Construcții. Stabilirea Unui Model Dinamic Unificat Pentru Unele Tipuri de Ciururi Și Mori VibratoareMarius Vlad100% (2)
- Vibratii Si ZgomoteDocument256 pagesVibratii Si ZgomoteNiculescu George RobertNo ratings yet
- CilindriDocument10 pagesCilindriAlina CristinaNo ratings yet
- Mecatronica, Notiuni GeneraleDocument5 pagesMecatronica, Notiuni GeneraleAndrei Mirela0% (1)
- Stanciu IoanDocument12 pagesStanciu IoanRosca PetruNo ratings yet
- Rezumat Tiron PDFDocument48 pagesRezumat Tiron PDFTomescu MadalinNo ratings yet
- Gaurirea Cu Laser MilitaruDocument13 pagesGaurirea Cu Laser Militarumatache dragosNo ratings yet
- Acţionarea Pneumatică A DispozitivelorDocument23 pagesAcţionarea Pneumatică A DispozitivelorPodaru DanaNo ratings yet
- m3 l1 Aplicatii Tegnologii de DetectareDocument23 pagesm3 l1 Aplicatii Tegnologii de DetectareAnghelescu-Topliceanu Georgiana AndreeaNo ratings yet
- Dumitrescu Bogdan RezumatDocument37 pagesDumitrescu Bogdan RezumatTimNo ratings yet
- Sisteme de MasurareDocument17 pagesSisteme de Masurareandreeaoana45100% (1)
- Sisteme Dinamice Analiza Vibro Acustica Indr Lab DSDocument165 pagesSisteme Dinamice Analiza Vibro Acustica Indr Lab DSDumitru NegaraNo ratings yet