You might also like
- Niñas rizadas: Patrón de amigurumi en ganchilloFrom EverandNiñas rizadas: Patrón de amigurumi en ganchilloRating: 4.5 out of 5 stars4.5/5 (6)
- Crucetas GMB HDDocument6 pagesCrucetas GMB HDIsaac Giron50% (2)
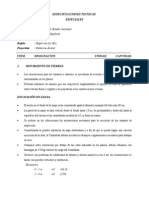
- Nivelacion de Terrenos Por Regresion TridimencionalDocument488 pagesNivelacion de Terrenos Por Regresion Tridimencionalcova5609No ratings yet
- Actividad 1 Calculo VectorialDocument12 pagesActividad 1 Calculo Vectorialnicolas ricardoNo ratings yet
- DIAT-Denuncia accidente trabajoDocument2 pagesDIAT-Denuncia accidente trabajoJorge Henríquez50% (2)
- Pre - ALG - Teoria de ExponentesDocument4 pagesPre - ALG - Teoria de Exponentescirculodeestudiohd100% (1)
- Acero A500Document22 pagesAcero A500Jesus Chocce Rios100% (6)
- Geologia de ChileDocument25 pagesGeologia de Chilegeocromo100% (1)
- Guia N°3 Funciones Cuadraticas PDFDocument7 pagesGuia N°3 Funciones Cuadraticas PDFPoloca Amoedo0% (1)
- Estructuras AlgebraicasDocument26 pagesEstructuras AlgebraicasJesus ValbuenaNo ratings yet
- Guia Productos NotablesDocument3 pagesGuia Productos NotablesPablo Andres Pérez Acevedo100% (1)
- Ejercicios Numeros EntrerosDocument3 pagesEjercicios Numeros Entrerosaleph314No ratings yet
- Ejercicios de Determinantes RessueltosDocument8 pagesEjercicios de Determinantes Ressueltosdrasesa100% (1)
- Soluciones Calculo IIDocument171 pagesSoluciones Calculo IIDavid YaoNo ratings yet
- Taller Cuarto Parcial 2022-1Document5 pagesTaller Cuarto Parcial 2022-1Jeidi QuinteroNo ratings yet
- Ejercicios Resueltos Productos y Cocientes NotablesDocument9 pagesEjercicios Resueltos Productos y Cocientes NotablesAugusto Salazar GiraldoNo ratings yet
- Derivada de Un ProductoDocument2 pagesDerivada de Un ProductoMiguel VargasNo ratings yet
- Derivada de Un ProductoDocument2 pagesDerivada de Un ProductoMiguel VargasNo ratings yet
- Expresiones algebraicasDocument2 pagesExpresiones algebraicasEstebanBaezNo ratings yet
- Cálculo diferencial: Resolución de ecuaciones, desigualdades y problemasDocument3 pagesCálculo diferencial: Resolución de ecuaciones, desigualdades y problemasEduardo Jimenez LeonNo ratings yet
- Vectores y matrices en R3Document18 pagesVectores y matrices en R3Javier Alfaro GarciaNo ratings yet
- Practica 1 Unidad IiDocument7 pagesPractica 1 Unidad IiKeyla DiazNo ratings yet
- P3 Mat1207bDocument1 pageP3 Mat1207bJose Armando Padilla CruzNo ratings yet
- Actividades CorregidasDocument15 pagesActividades Corregidaslamamaad1No ratings yet
- Algebra Lineal - Combinaciones lineales y espacios vectorialesDocument21 pagesAlgebra Lineal - Combinaciones lineales y espacios vectorialesMario BetancourtNo ratings yet
- Deber - 3.2 Fundamentos MatemáticosDocument3 pagesDeber - 3.2 Fundamentos MatemáticosBryan JimenezNo ratings yet
- 3 MATEMATICAS CLEI 6 RptaDocument9 pages3 MATEMATICAS CLEI 6 RptaJorge Iván Cifuentes DuqueNo ratings yet
- Proyecto 1Document6 pagesProyecto 1Haydee SayagoNo ratings yet
- Tarea4 367 Sandra GutierrezDocument23 pagesTarea4 367 Sandra GutierrezViviana SantosNo ratings yet
- MA619 - 202400 - 0101 - Ejercicios PropuestosDocument3 pagesMA619 - 202400 - 0101 - Ejercicios PropuestosCatherine JaraNo ratings yet
- EcuacionesDocument10 pagesEcuacionesKatalynaPrincsNo ratings yet
- Tarea 3 Aplicación de IntegralesDocument8 pagesTarea 3 Aplicación de Integralesdana foreroNo ratings yet
- FactoresLinealesDiferentesDocument3 pagesFactoresLinealesDiferentesMelissa Hernández AcevedoNo ratings yet
- funciones y relacionesDocument11 pagesfunciones y relacionesadymagdaNo ratings yet
- Derivadas TrigonometricasDocument2 pagesDerivadas TrigonometricasMiguel VargasNo ratings yet
- Derivadas TrigonometricasDocument2 pagesDerivadas TrigonometricasMiguel VargasNo ratings yet
- Ejercicios de álgebra y lógica de la UNAMDocument6 pagesEjercicios de álgebra y lógica de la UNAMDiego Correa SilvaNo ratings yet
- Adrian Garcia Problema 4.69 CorrecionDocument53 pagesAdrian Garcia Problema 4.69 CorrecionJohn EstradaNo ratings yet
- Tarea de Unidad 02Document3 pagesTarea de Unidad 02edesmitNo ratings yet
- Taller 1 Fisica - Electricidad y Magnetismo BDocument5 pagesTaller 1 Fisica - Electricidad y Magnetismo BWalter Bejarano MarquezNo ratings yet
- Funciones CuadraticasDocument2 pagesFunciones CuadraticasFERNANDO ARISTIDES LOPEZ ZAMBRANONo ratings yet
- Ejercicio 2 - Literal - E - RETROALIMENTACIONDocument17 pagesEjercicio 2 - Literal - E - RETROALIMENTACIONLisbeth GiacomettoNo ratings yet
- Curso Propedeutico - Matematicas. - Unet PDFDocument84 pagesCurso Propedeutico - Matematicas. - Unet PDFJose Luis Diaz100% (1)
- Guia 9Document4 pagesGuia 9Ricardo Andres Del Aguila FloresNo ratings yet
- Trabajo Practico Unidad 2 PolinomiosDocument4 pagesTrabajo Practico Unidad 2 PolinomiosFlorencia LopezNo ratings yet
- AlgebraDocument2 pagesAlgebrapedroNo ratings yet
- Taller #1Document13 pagesTaller #1ROBERTO CARLOS BLANCO CHARRYSNo ratings yet
- FISICOQUÍMICA I Examen DiagnosticoDocument1 pageFISICOQUÍMICA I Examen DiagnosticoRaúl Alejandro PasillasNo ratings yet
- Practica 1 Fund Cs CompDocument3 pagesPractica 1 Fund Cs Comp19 Aldira Mamani SangaNo ratings yet
- DocumentoDocument3 pagesDocumentoAbraham GeronimoNo ratings yet
- GUIA 3 - POLINOMIOSjkklDocument4 pagesGUIA 3 - POLINOMIOSjkklJuliana RamírezNo ratings yet
- Practica 1 Mat 1101 HDocument2 pagesPractica 1 Mat 1101 HAdalid Erwin Huanca LluscoNo ratings yet
- Tarea 4Document10 pagesTarea 4susen mayerly malpica perezNo ratings yet
- Practica 2Document2 pagesPractica 2Juan Marcelo Guzman MamaniNo ratings yet
- Practica ALG Unidad 1Document5 pagesPractica ALG Unidad 1Javier CoriaNo ratings yet
- Matemáticas DiscretasDocument7 pagesMatemáticas DiscretasJoel ChochoNo ratings yet
- Calculo LL - PrácticoDocument3 pagesCalculo LL - PrácticoDaniel TorrezNo ratings yet
- Tarea 4.2Document5 pagesTarea 4.2Goofykiller2003 2033No ratings yet
- Tarea 2 Acompaña, IentoDocument7 pagesTarea 2 Acompaña, IentoJose OmarNo ratings yet
- Globales Mate A2Document4 pagesGlobales Mate A2Diego Rodrigo Uribe RodriguezNo ratings yet
- Estudiante 1 CalculoDocument11 pagesEstudiante 1 CalculoGabriela CastañoNo ratings yet
- Control de la bola blanca - Test de tecnicas avanzadas -- Auténtica confirmación de habilidades para jugadores IniciadosFrom EverandControl de la bola blanca - Test de tecnicas avanzadas -- Auténtica confirmación de habilidades para jugadores IniciadosNo ratings yet
- M3H35Document28 pagesM3H35Nefi Andres Linco OlaveNo ratings yet
- ETE PavimentacionDocument41 pagesETE PavimentacionNefi Andres Linco OlaveNo ratings yet
- Instructivo para Ploteo y Escalas en AutoCADDocument9 pagesInstructivo para Ploteo y Escalas en AutoCADYerson MendozaNo ratings yet
- Codigo de Normas MINVUDocument700 pagesCodigo de Normas MINVUMario Navarrete Quiroga100% (1)
- ZapatasDocument17 pagesZapatasDaniel Gonzalez MNo ratings yet
- Catalogo-Precios Hoffens 2015Document54 pagesCatalogo-Precios Hoffens 2015Nefi Andres Linco OlaveNo ratings yet
- Tema02 Mediciones de Permeabilidad in SituDocument100 pagesTema02 Mediciones de Permeabilidad in SitujuliebabisNo ratings yet
- Undp CL Medioambiente Cosecha-Agua-Lluvia PDFDocument48 pagesUndp CL Medioambiente Cosecha-Agua-Lluvia PDFEmersonNo ratings yet
- CAP3Document30 pagesCAP3Nefi Andres Linco OlaveNo ratings yet
- Cámaras y Radieres de Alcantarillado (Tipo A y B)Document8 pagesCámaras y Radieres de Alcantarillado (Tipo A y B)Nefi Andres Linco OlaveNo ratings yet
- E.T.E A.SDocument7 pagesE.T.E A.SNefi Andres Linco OlaveNo ratings yet
- PilotesDocument4 pagesPilotesNefi Andres Linco OlaveNo ratings yet
- Pesos específicos materiales construcciónDocument4 pagesPesos específicos materiales construcciónram197No ratings yet
- RED PanguipulliDocument1 pageRED PanguipulliNefi Andres Linco OlaveNo ratings yet
- ZapatasDocument17 pagesZapatasDaniel Gonzalez MNo ratings yet
- Cuenca Del Rio BuenoDocument147 pagesCuenca Del Rio BuenoNefi Andres Linco OlaveNo ratings yet
- 2 Memoriade CalculoybasesDocument17 pages2 Memoriade CalculoybasesNefi Andres Linco OlaveNo ratings yet
- Analisis ElásticoDocument12 pagesAnalisis ElásticoNefi Andres Linco OlaveNo ratings yet
- Normas Redaccion Referencias Bibliograficas IicaDocument9 pagesNormas Redaccion Referencias Bibliograficas IicaMaria Mercedes Wyss AlvarezNo ratings yet
- Viga Medio - Elast 1Document6 pagesViga Medio - Elast 1Dennis Vicente AyalaNo ratings yet
- 1 Etapas Del Proyecto de Ing Estructural PDFDocument14 pages1 Etapas Del Proyecto de Ing Estructural PDFSebastianNo ratings yet
- Momento FlectorDocument114 pagesMomento FlectorRubén Fernández100% (2)
- Clase 1-2009 CompletaDocument0 pagesClase 1-2009 CompletaNefi Andres Linco OlaveNo ratings yet
- Como CitarDocument3 pagesComo CitarLeonardo BajasNo ratings yet
- Introducción a las vibraciones: tipos, causas y ecuaciones de movimientoDocument41 pagesIntroducción a las vibraciones: tipos, causas y ecuaciones de movimientoEdwin AlexisNo ratings yet
- Libro PlasticidadDocument76 pagesLibro PlasticidadcquintanillaNo ratings yet
- Tenso Teoria PDFDocument7 pagesTenso Teoria PDFflorenciaNo ratings yet
- Definición de Pronóstico y Sus VariantesDocument14 pagesDefinición de Pronóstico y Sus VariantesLuis Parra Jr.No ratings yet
- Manual de Identidad Grafica2019 CDMXDocument77 pagesManual de Identidad Grafica2019 CDMXasomateNo ratings yet
- Salsa de ají gourmet Sumaq: estudio de mercado y plan estratégicoDocument216 pagesSalsa de ají gourmet Sumaq: estudio de mercado y plan estratégicoabenitechNo ratings yet
- Contenido Programatico Comercio ExteriorDocument4 pagesContenido Programatico Comercio ExteriorfuriamaxiNo ratings yet
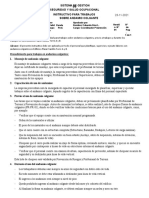
- Instructivo Uso de Andamios ColgantesDocument1 pageInstructivo Uso de Andamios Colgantesmanuel berriosNo ratings yet
- Analisis Libertad SindicalDocument5 pagesAnalisis Libertad SindicalCorvusNo ratings yet
- Antecedentes NacionalesDocument3 pagesAntecedentes NacionalesJHEYSON MORALES VASQUEZNo ratings yet
- Procedimiento Manejo de Residuos OBRADocument7 pagesProcedimiento Manejo de Residuos OBRABarbara Evelyn Torres BastiasNo ratings yet
- 1.trabajo - Red de Tuberías de GasDocument13 pages1.trabajo - Red de Tuberías de GasJesus BolivarNo ratings yet
- Cómo Reducir Los Costos de La Seguridad en La ObraDocument3 pagesCómo Reducir Los Costos de La Seguridad en La ObraJosé Antonio Esparza BlancoNo ratings yet
- Memoria Descriptiva Capillas VelatoriasDocument52 pagesMemoria Descriptiva Capillas Velatoriasjoao1031No ratings yet
- TUTELA Requerir Pago de LICENCIA DE MATERNIDADDocument8 pagesTUTELA Requerir Pago de LICENCIA DE MATERNIDADSasha Sanchez G.No ratings yet
- Sistemas Eléctricos de Potencia: Ingeniería en ElectromecánicaDocument7 pagesSistemas Eléctricos de Potencia: Ingeniería en ElectromecánicaAna MarreroNo ratings yet
- Declaración Viena Delincuencia JusticiaDocument6 pagesDeclaración Viena Delincuencia JusticiaCarlos Muerte GonzalezNo ratings yet
- Diapositivas Trazado de Rutas - Caminos IDocument15 pagesDiapositivas Trazado de Rutas - Caminos IRaul Edgar Castillejo MelgarejoNo ratings yet
- Caso WongDocument22 pagesCaso Wongnicole velasquezNo ratings yet
- Análisis cinemático mecanismosDocument25 pagesAnálisis cinemático mecanismosJhon SánchezNo ratings yet
- Zclase Semana13 - Plan de Contingencia AmbientalDocument14 pagesZclase Semana13 - Plan de Contingencia AmbientalMarisol SCanoNo ratings yet
- Taller 3 Matematica FinancieraDocument15 pagesTaller 3 Matematica Financieramilagro babiloniaNo ratings yet
- Archivo AdministrativoDocument7 pagesArchivo AdministrativoAdriana RonderosNo ratings yet
- Costo de Personal - Lady Sanchez y Sofia VelasquezDocument10 pagesCosto de Personal - Lady Sanchez y Sofia Velasquezladysanchez1197No ratings yet
- 51 Presentacioin de Caso PracticoDocument3 pages51 Presentacioin de Caso PracticojohannaNo ratings yet
- Econometría objetivos métodosDocument13 pagesEconometría objetivos métodoscristian_masterNo ratings yet
- E-AC-06-GS-H Criterio de Evaluacion Galicia Seguros HOGAR Rev08-1Document15 pagesE-AC-06-GS-H Criterio de Evaluacion Galicia Seguros HOGAR Rev08-1Emi BrainNo ratings yet
- Coseno HiperbolicoDocument9 pagesCoseno HiperbolicoElizabethNo ratings yet
- Informe Ssoma 10Document26 pagesInforme Ssoma 10chocotitoduroNo ratings yet
- Recibo Cfe-1Document2 pagesRecibo Cfe-1Sara Maria Muñoz FelixNo ratings yet
- Minera SeleneDocument20 pagesMinera SelenedeyviNo ratings yet