You might also like
- 13 - Data Mining Within A Regression FrameworkDocument27 pages13 - Data Mining Within A Regression FrameworkEnzo GarabatosNo ratings yet
- Density estimation packages compared for speed and accuracyDocument17 pagesDensity estimation packages compared for speed and accuracyGraciela MarquesNo ratings yet
- Linear Regression Analysis for STARDEX: Key MethodsDocument6 pagesLinear Regression Analysis for STARDEX: Key MethodsSrinivasu UpparapalliNo ratings yet
- Uni Variate DistributionsDocument13 pagesUni Variate Distributionsforscribd1981No ratings yet
- Review1 5Document36 pagesReview1 5api-234480282No ratings yet
- The Dantzig Selector: Statistical Estimation When p is Much Larger than nDocument35 pagesThe Dantzig Selector: Statistical Estimation When p is Much Larger than nehsanNo ratings yet
- Lec 4: Prob Stats Intro Uncertainty Estimation Normal Dist PDF RegressionDocument17 pagesLec 4: Prob Stats Intro Uncertainty Estimation Normal Dist PDF RegressionNazeeh Abdulrhman AlbokaryNo ratings yet
- Econometric Analysis of Cross Section and Panel Data, 2e: Nonparametric and Semiparametric MethodsDocument69 pagesEconometric Analysis of Cross Section and Panel Data, 2e: Nonparametric and Semiparametric MethodsLino Ccarhuaypiña ContrerasNo ratings yet
- Multivariate Convex Regression With Adaptive PartitioningDocument34 pagesMultivariate Convex Regression With Adaptive PartitioningRam K RijalNo ratings yet
- Nonparametric Quantile EstimationDocument32 pagesNonparametric Quantile EstimationMannyNo ratings yet
- Linear Models: The Least-Squares MethodDocument24 pagesLinear Models: The Least-Squares MethodAnimated EngineerNo ratings yet
- Partial Inverse Regression: Biometrika (2007), 94, 3, Pp. 615-625 Printed in Great BritainDocument12 pagesPartial Inverse Regression: Biometrika (2007), 94, 3, Pp. 615-625 Printed in Great BritainLiliana ForzaniNo ratings yet
- Floater HormannDocument17 pagesFloater HormannLa TinoNo ratings yet
- CHP 1curve FittingDocument21 pagesCHP 1curve FittingAbrar HashmiNo ratings yet
- Applied and Computational Harmonic Analysis: Emmanuel J. Candès, Mark A. DavenportDocument7 pagesApplied and Computational Harmonic Analysis: Emmanuel J. Candès, Mark A. DavenportCatalin TomaNo ratings yet
- Resampling Methods For Time SeriesDocument5 pagesResampling Methods For Time SeriesMark Carlos SecadaNo ratings yet
- Cite453High Res Radar Via CSDocument10 pagesCite453High Res Radar Via CSNag ChallaNo ratings yet
- Piecewise-Polynomial Regression TreesDocument30 pagesPiecewise-Polynomial Regression Treesfakihilham2705No ratings yet
- Discussion: The Dantzig Selector: Statistical Estimation WhenDocument5 pagesDiscussion: The Dantzig Selector: Statistical Estimation WhenSyed MaazNo ratings yet
- 01 Distribution FunctionsDocument7 pages01 Distribution FunctionsJhames Niño TrinidadNo ratings yet
- Detecting A Vector Based On Linear Measurements: Ery Arias-CastroDocument9 pagesDetecting A Vector Based On Linear Measurements: Ery Arias-Castroshyam_utdNo ratings yet
- Ridge 3Document4 pagesRidge 3manishnegiiNo ratings yet
- Compressed SensingDocument34 pagesCompressed SensingLogan ChengNo ratings yet
- The Hopfield Model: 1 Deterministic DynamicsDocument11 pagesThe Hopfield Model: 1 Deterministic DynamicssachinNo ratings yet
- A Survey of Dimension Reduction TechniquesDocument18 pagesA Survey of Dimension Reduction TechniquesEulalio Colubio Jr.No ratings yet
- Estimating Distributions and Densities: 36-350, Data Mining, Fall 2009 23 November 2009Document7 pagesEstimating Distributions and Densities: 36-350, Data Mining, Fall 2009 23 November 2009machinelearnerNo ratings yet
- Uniform distribution continuous density functionDocument5 pagesUniform distribution continuous density functionafjkjchhghgfbfNo ratings yet
- Stats306b Spring14 Lecture7 - ScribedDocument6 pagesStats306b Spring14 Lecture7 - ScribedasfdSFDSFGENo ratings yet
- Top Factors Influencing Shared Bike DemandDocument7 pagesTop Factors Influencing Shared Bike Demandmudassar shaik100% (5)
- Mathematical AnalysisDocument31 pagesMathematical AnalysisPablo CarreñoNo ratings yet
- Lecture Notes Nonlinear Equations and RootsDocument9 pagesLecture Notes Nonlinear Equations and RootsAmbreen KhanNo ratings yet
- Meinshausen Et Al-2010-Journal of The Royal Statistical Society: Series B (Statistical Methodology)Document57 pagesMeinshausen Et Al-2010-Journal of The Royal Statistical Society: Series B (Statistical Methodology)Esad TahaNo ratings yet
- 6graphical Representation of Measurement ResultsDocument5 pages6graphical Representation of Measurement ResultsMehmet Akif DemirlekNo ratings yet
- Unit 1Document21 pagesUnit 1read4freeNo ratings yet
- Msda3 NotesDocument8 pagesMsda3 Notesatleti2No ratings yet
- Chapter4 Regression ModelAdequacyCheckingDocument38 pagesChapter4 Regression ModelAdequacyCheckingAishat OmotolaNo ratings yet
- Scale-based Clustering using Radial Basis Function Networks (RBFNDocument6 pagesScale-based Clustering using Radial Basis Function Networks (RBFNMahakGoindaniNo ratings yet
- Robust Statistics For Outlier Detection (Peter J. Rousseeuw and Mia Hubert)Document8 pagesRobust Statistics For Outlier Detection (Peter J. Rousseeuw and Mia Hubert)Robert PetersonNo ratings yet
- PACS Numbers: 01.30.Pp, 01.55.+b, 02.70.uuDocument18 pagesPACS Numbers: 01.30.Pp, 01.55.+b, 02.70.uuLovinf FlorinNo ratings yet
- Entropy Manipulation of Arbitrary Nonlinear MappingsDocument10 pagesEntropy Manipulation of Arbitrary Nonlinear Mappingsminliang2kbjNo ratings yet
- Evolutionary Computation and Wright S Equati - 2002 - Theoretical Computer ScienDocument21 pagesEvolutionary Computation and Wright S Equati - 2002 - Theoretical Computer ScienwassimNo ratings yet
- Devore Ch. 1 Navidi Ch. 1Document16 pagesDevore Ch. 1 Navidi Ch. 1chinchouNo ratings yet
- Macheler 1993Document22 pagesMacheler 1993Domenico VizzariNo ratings yet
- Mathematics of Sparsity (And A Few Other Things) : Emmanuel Cand' EsDocument27 pagesMathematics of Sparsity (And A Few Other Things) : Emmanuel Cand' EsSrinivasaNo ratings yet
- Simple Linear Regression: From Wikipedia, The Free EncyclopediaDocument10 pagesSimple Linear Regression: From Wikipedia, The Free EncyclopediaGabriel OmarNo ratings yet
- Very-High-Precision Normalized Eigenfunctions For A Class of SCHR Odinger Type EquationsDocument6 pagesVery-High-Precision Normalized Eigenfunctions For A Class of SCHR Odinger Type EquationshiryanizamNo ratings yet
- Machine Learning, Spring 2005Document3 pagesMachine Learning, Spring 2005deepanshuNo ratings yet
- 9-Hislopia 3 (2) 2010 Curve FittingDocument15 pages9-Hislopia 3 (2) 2010 Curve FittingShyamkant AnwaneNo ratings yet
- Kruskal 1964bDocument15 pagesKruskal 1964byismar farith mosquera mosqueraNo ratings yet
- Local - PCA - It Is Against PCADocument24 pagesLocal - PCA - It Is Against PCAdr musafirNo ratings yet
- Mathematical FinanceDocument13 pagesMathematical FinanceAlpsNo ratings yet
- On Theory of Compressive Sensing Via ' - Minimization: Simple Derivations and ExtensionsDocument25 pagesOn Theory of Compressive Sensing Via ' - Minimization: Simple Derivations and Extensionskoudzo7No ratings yet
- Introduction To Error AnalysisDocument21 pagesIntroduction To Error AnalysisMichael MutaleNo ratings yet
- DSR Mid1Document10 pagesDSR Mid1vinay shivakotiNo ratings yet
- ESL: Chapter 1: 1.1 Introduction To Linear RegressionDocument4 pagesESL: Chapter 1: 1.1 Introduction To Linear RegressionPete Jacopo Belbo CayaNo ratings yet
- Unbiased Estimation of A Sparse Vector in White Gaussian NoiseDocument46 pagesUnbiased Estimation of A Sparse Vector in White Gaussian NoiseMohitRajputNo ratings yet
- 10-601 Machine Learning (Fall 2010) Principal Component AnalysisDocument8 pages10-601 Machine Learning (Fall 2010) Principal Component AnalysisJorge_Alberto__1799No ratings yet
- On Optimal and Data-Based Histograms: Department of Mathematical Sciences, Rice University, Houston, TexasDocument6 pagesOn Optimal and Data-Based Histograms: Department of Mathematical Sciences, Rice University, Houston, Texasoctavinavarro8236No ratings yet
- Summer ActivitiesDocument32 pagesSummer Activitiesminaya2008No ratings yet
- Ye Liu TRB2016 WRRDocument36 pagesYe Liu TRB2016 WRRminaya2008No ratings yet
- Thrust From Symmetric Capacitors Using Quantised Inertia: July 2021Document8 pagesThrust From Symmetric Capacitors Using Quantised Inertia: July 2021minaya2008No ratings yet
- EGGBUCKLANDDocument33 pagesEGGBUCKLANDminaya2008No ratings yet
- Optimal Operation of High-Speed Trains Using Hybrid ModelDocument17 pagesOptimal Operation of High-Speed Trains Using Hybrid Modelminaya2008No ratings yet
- Analog NotesDocument54 pagesAnalog Noteser_manikaur2221No ratings yet
- Semiconductor ElectronicsDocument46 pagesSemiconductor Electronicspraveen2910No ratings yet
- StaelinDocument443 pagesStaelinWilliam Marques100% (2)
- Chap29 PDFDocument22 pagesChap29 PDFTristan LucyNo ratings yet
- Summer ActivitiesDocument32 pagesSummer Activitiesminaya2008No ratings yet
- Basic Electronic & Transistor Circuits PDFDocument54 pagesBasic Electronic & Transistor Circuits PDFSandeep GoyalNo ratings yet
- EGGBUCKLANDDocument33 pagesEGGBUCKLANDminaya2008No ratings yet
- Equation Editor PDFDocument4 pagesEquation Editor PDFonttNo ratings yet
- Nonlinear Programming Methods for Optimal Train ControlDocument58 pagesNonlinear Programming Methods for Optimal Train Controlminaya2008No ratings yet
- Flow and Diffusion Equations For Fluid Flow in Porous Rocks For The Multiphase Flow PhenomenaDocument10 pagesFlow and Diffusion Equations For Fluid Flow in Porous Rocks For The Multiphase Flow PhenomenaAJER JOURNALNo ratings yet
- Solid Effects On Solid Objects PDFDocument11 pagesSolid Effects On Solid Objects PDFminaya2008No ratings yet
- Which Module To Use ACDC RF WaveOptics PDFDocument4 pagesWhich Module To Use ACDC RF WaveOptics PDFminaya2008No ratings yet
- 01.modelling - The - Pioneer - Anomaly. 2007 PDFDocument15 pages01.modelling - The - Pioneer - Anomaly. 2007 PDFminaya2008No ratings yet
- Which Module To Use ACDC RF WaveOptics PDFDocument4 pagesWhich Module To Use ACDC RF WaveOptics PDFminaya2008No ratings yet
- 3D Model Control ExcavatorDocument7 pages3D Model Control Excavatorminaya2008No ratings yet
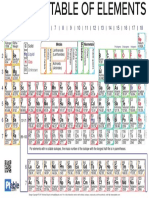
- Periodic Table PDFDocument1 pagePeriodic Table PDFpreetamNo ratings yet
- Artificial Neural NetworksDocument136 pagesArtificial Neural Networksxlnc1No ratings yet
- Calculus 1 Topic 1Document9 pagesCalculus 1 Topic 1hallel jhon butacNo ratings yet
- Linear Circuit Analysis Signals and ConceptsDocument18 pagesLinear Circuit Analysis Signals and ConceptsTehseen HussainNo ratings yet
- CBSE Class 11 Assignment For Complex Numbers and Quadratic Equations PDFDocument2 pagesCBSE Class 11 Assignment For Complex Numbers and Quadratic Equations PDFanimeshtechnosNo ratings yet
- Assignment 1 (Group Assignment)Document3 pagesAssignment 1 (Group Assignment)Sudarshan KumarNo ratings yet
- Inverse Functions FactsDocument2 pagesInverse Functions FactsjanellennuiNo ratings yet
- Linear Programming - Graphical SolutionDocument17 pagesLinear Programming - Graphical SolutionTunisha Bhadauria100% (1)
- The Hypothesis Testing On One-Sample ProportionDocument18 pagesThe Hypothesis Testing On One-Sample ProportionChecken Joy100% (1)
- Advanced Vibrations - S. Graham KellyDocument5 pagesAdvanced Vibrations - S. Graham Kellymach20_aardvark8064No ratings yet
- STEM BasicCalculus AntiderivativeOfPolynomialandRadicalDocument5 pagesSTEM BasicCalculus AntiderivativeOfPolynomialandRadicalNelson SalosagcolNo ratings yet
- Research Design and Methods An Applied Guide For The Scholar Practitioner NullDocument61 pagesResearch Design and Methods An Applied Guide For The Scholar Practitioner Nullgeorgia.walsh98497% (39)
- Complex ManifoldsDocument204 pagesComplex Manifoldsrianlopes100% (2)
- Gamma, The Euler-Mascheroni ConstantDocument1 pageGamma, The Euler-Mascheroni Constantsam iam / Salvatore Gerard MichealNo ratings yet
- Proving Diffeomorphism Invariance of Boundary PDFDocument3 pagesProving Diffeomorphism Invariance of Boundary PDFEric HoffmannNo ratings yet
- Turbo Pascal Numerical Methods Toolbox 1986 PDFDocument323 pagesTurbo Pascal Numerical Methods Toolbox 1986 PDFPECABANo ratings yet
- 059 Article EquationsDocument17 pages059 Article EquationselectrotehnicaNo ratings yet
- Testing The Difference Between Means, Variances, and ProportionsDocument53 pagesTesting The Difference Between Means, Variances, and ProportionsaswardiNo ratings yet
- Is Zc415 (Data Mining BITS-WILP)Document4 pagesIs Zc415 (Data Mining BITS-WILP)Anonymous Lz6f4C6KFNo ratings yet
- 1-Hanbook - Project - Ebtp4106 - BTM & BMMG & BPFMDocument23 pages1-Hanbook - Project - Ebtp4106 - BTM & BMMG & BPFMSuwit HannieNo ratings yet
- Image Reconstruction From ProjectionsDocument110 pagesImage Reconstruction From Projectionsresmi_ngNo ratings yet
- Advance Engineering Mathematics ECE 321Document33 pagesAdvance Engineering Mathematics ECE 321Cllyan ReyesNo ratings yet
- VariationDocument6 pagesVariationPSYCHO / FLOWNo ratings yet
- Gretl Empirical Exercise 2 - KEY PDFDocument3 pagesGretl Empirical Exercise 2 - KEY PDFDaniel Lee Eisenberg JacobsNo ratings yet
- Introducing Research Methodology - A Beginner S Guide To Doing A Research Project.Document681 pagesIntroducing Research Methodology - A Beginner S Guide To Doing A Research Project.Rida Sameen0% (1)
- A Content Analysis of The Vision and Mission Statements of Top Ten Leading Universities in AfricaDocument16 pagesA Content Analysis of The Vision and Mission Statements of Top Ten Leading Universities in AfricaSyahiduzZamanNo ratings yet
- Improper Integrals Handout ExplainedDocument1 pageImproper Integrals Handout ExplainedJhozelle BanghalNo ratings yet
- Managerial Economics in A Global Economy: Linear ProgrammingDocument18 pagesManagerial Economics in A Global Economy: Linear ProgrammingArif DarmawanNo ratings yet
- Significant Figure Rules For LogsDocument2 pagesSignificant Figure Rules For Logsmooningearth2No ratings yet
- PracticalDocument11 pagesPracticalNOLUBABALONo ratings yet
- 2017 2 Joh MuarDocument3 pages2017 2 Joh MuarLee Shi HockNo ratings yet
- 030 Integer Programming PDFDocument26 pages030 Integer Programming PDFPranay VigNo ratings yet