You might also like
- 3 Simple Step To Start Selling On DarazDocument27 pages3 Simple Step To Start Selling On DarazM. Amir RiazNo ratings yet
- Daraz Commission StructureDocument5 pagesDaraz Commission StructureMuhammad Umer Baig100% (1)
- Project 2Document15 pagesProject 2Sumeet Saurav100% (1)
- Overspeed Protection RetrofitsDocument2 pagesOverspeed Protection RetrofitsChakravarthy BharathNo ratings yet
- Finite State Machines: by Mike ChenDocument25 pagesFinite State Machines: by Mike ChenKulwant NagiNo ratings yet
- Cost of ProductionDocument24 pagesCost of ProductionPiyush MahajanNo ratings yet
- NetSim User ManualDocument373 pagesNetSim User ManualShashankSinghNo ratings yet
- IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 7 , NO. 2, APRIL I991Document12 pagesIEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 7 , NO. 2, APRIL I991maysamshNo ratings yet
- Shortform Guide: Version: 5.2/1 Edition: 26 January 2015Document70 pagesShortform Guide: Version: 5.2/1 Edition: 26 January 2015Sandro ValenteNo ratings yet
- 2.2 Properties and Limitations of Finite State MachinesDocument3 pages2.2 Properties and Limitations of Finite State Machinescoderanonymous5No ratings yet
- Intelligent Line-Following Robot ProjectDocument7 pagesIntelligent Line-Following Robot ProjectAmla SingNo ratings yet
- Path Following For A Differential Drive Robot - MATLAB & Simulink ExampleDocument8 pagesPath Following For A Differential Drive Robot - MATLAB & Simulink Exampletdit84No ratings yet
- Tender Document OTM Double Cabin Pick Up Microbus1Document75 pagesTender Document OTM Double Cabin Pick Up Microbus1Rawnakul Islam OpuNo ratings yet
- 20-21 CS Midterm Exam QuestionsDocument2 pages20-21 CS Midterm Exam QuestionsAhmet ŞimşekNo ratings yet
- Air Conditioner Simulator: SimuairDocument3 pagesAir Conditioner Simulator: Simuairnaren233No ratings yet
- Performance Characteristics of InstrumentsDocument39 pagesPerformance Characteristics of Instrumentstesfaye meberate100% (1)
- CRDB Test Cases TPH v.1.3Document262 pagesCRDB Test Cases TPH v.1.3msvinuNo ratings yet
- Cisco 2960 Switch Configuration Commands Step by Step - Configuring CiscoDocument8 pagesCisco 2960 Switch Configuration Commands Step by Step - Configuring CiscoAlamgir Mahmud MiltonNo ratings yet
- Lab 14Document11 pagesLab 14amalkatribNo ratings yet
- Synchronous Counter Design and AnalysisDocument12 pagesSynchronous Counter Design and AnalysisRajasekar PichaimuthuNo ratings yet
- VHDL FSM UNIT 5 ET&T 7th SemDocument22 pagesVHDL FSM UNIT 5 ET&T 7th SemDEEPA KUNWARNo ratings yet
- Lect5 FSMDocument23 pagesLect5 FSMSangeetha BajanthriNo ratings yet
- FSM Design & Implementation: CT213 - Computing System OrganizationDocument41 pagesFSM Design & Implementation: CT213 - Computing System OrganizationAviral AgarwalNo ratings yet
- HDL Based DesignDocument7 pagesHDL Based DesignSriramamurthy GurugubelliNo ratings yet
- Ce G 3150 Lab 4 Traffic LightDocument22 pagesCe G 3150 Lab 4 Traffic LightAli AhmadNo ratings yet
- SEQUENTIAL LOGIC IMPLEMENTATIONDocument18 pagesSEQUENTIAL LOGIC IMPLEMENTATIONchristytangNo ratings yet
- Synchronous Sequential CircuitsDocument10 pagesSynchronous Sequential CircuitsDenise NelsonNo ratings yet
- Comparative study on Moore and Mealy State MachinesDocument10 pagesComparative study on Moore and Mealy State MachinesH052 Rajesh Komaravalli ECENo ratings yet
- Experiment 8Document6 pagesExperiment 8routbismay99No ratings yet
- Introduction State MachineDocument51 pagesIntroduction State MachineAnkit SinghNo ratings yet
- FSM SlidesDocument37 pagesFSM SlidesSahil Sharma0% (1)
- Week 12 - Module 10 Finite State Machines 1Document7 pagesWeek 12 - Module 10 Finite State Machines 1Ben GwenNo ratings yet
- Chapter #8: Finite State Machine DesignDocument57 pagesChapter #8: Finite State Machine DesignAli AhmadNo ratings yet
- Finite State Machines: ECE 449 - Computer Design LabDocument49 pagesFinite State Machines: ECE 449 - Computer Design LabAvinash KumarNo ratings yet
- Finite State Machines: Moore MachineDocument4 pagesFinite State Machines: Moore Machineborakas_borakasNo ratings yet
- Finite-State Machine (FSM) : TaskDocument7 pagesFinite-State Machine (FSM) : TaskelexboyNo ratings yet
- Lecture 9: Finite State Representation of Digital Circuits: DOC112: Computer Hardware Lecture 9 1Document4 pagesLecture 9: Finite State Representation of Digital Circuits: DOC112: Computer Hardware Lecture 9 1Debashish PalNo ratings yet
- Sequential Logic Implementation: Models For Representing Sequential CircuitsDocument18 pagesSequential Logic Implementation: Models For Representing Sequential CircuitsBrightNo ratings yet
- Finite State MachinesDocument8 pagesFinite State MachinesHnd FinalNo ratings yet
- FSM ProbDocument3 pagesFSM ProbSouhardya MondalNo ratings yet
- ECE 331 - Digital System Design: Derivation of State Graphs and State TablesDocument39 pagesECE 331 - Digital System Design: Derivation of State Graphs and State TablesRizulNo ratings yet
- State Machine Present State: A0-Ak-1 Inputs Outputs B0-Bm-1Document4 pagesState Machine Present State: A0-Ak-1 Inputs Outputs B0-Bm-1Fatmir KelmendiNo ratings yet
- Unit - 1 DSDDocument56 pagesUnit - 1 DSDultimatekp144No ratings yet
- PI Controller Design for DC MotorDocument4 pagesPI Controller Design for DC MotorsamielmadssiaNo ratings yet
- Combinational and Sequential Circuits DesignDocument25 pagesCombinational and Sequential Circuits DesignJadesh ChandaNo ratings yet
- Vending MAchineDocument22 pagesVending MAchineavireddy1100% (2)
- Mentor Graphics Tutorial: Schematic Capture, Simulation, & Placement/RoutingDocument22 pagesMentor Graphics Tutorial: Schematic Capture, Simulation, & Placement/RoutingHairil HanifNo ratings yet
- Digsys Chapter 3Document53 pagesDigsys Chapter 3David OmaguNo ratings yet
- Mealy and Moore Type Finite State MachinesDocument9 pagesMealy and Moore Type Finite State MachinesNithyendra RoyNo ratings yet
- How-to-Design-a-Finite-State-Machine-Sequence-DetectorDocument14 pagesHow-to-Design-a-Finite-State-Machine-Sequence-Detectorzlh14188No ratings yet
- Robotic System ModellingDocument20 pagesRobotic System ModellingsurajNo ratings yet
- Lab4 - DC Motor Position Digital Controller Design - 7-11-2018Document22 pagesLab4 - DC Motor Position Digital Controller Design - 7-11-2018Eng. Ibrahim Abdullah AlruhmiNo ratings yet
- DPSD Model Question Bank With AnswersDocument7 pagesDPSD Model Question Bank With AnswersAkash SanjeevNo ratings yet
- Tutorial 5Document31 pagesTutorial 5Sathish KumarNo ratings yet
- Presentaion 7 Programmable Logic Controller (PLC)Document27 pagesPresentaion 7 Programmable Logic Controller (PLC)wabdushukurNo ratings yet
- Sequential Circuit DesignDocument28 pagesSequential Circuit DesignNiranda PereraNo ratings yet
- Digital Design Assignment 40%Document2 pagesDigital Design Assignment 40%Obada Ar-ruzziNo ratings yet
- Lecture 11Document21 pagesLecture 11fotescuiondaniel7No ratings yet
- Finite State Machine Design: Prith Banerjee Ece C03 Advanced Digital Design Spring 1998Document47 pagesFinite State Machine Design: Prith Banerjee Ece C03 Advanced Digital Design Spring 1998VIKRAMNo ratings yet
- Chapter #8: Finite State Machine DesignDocument57 pagesChapter #8: Finite State Machine DesignniluNo ratings yet
- AESCSF Framework Overview 2020-21Document30 pagesAESCSF Framework Overview 2020-21Sandeep SinghNo ratings yet
- Bimbo Marketing ResearchDocument27 pagesBimbo Marketing Researcheman.konsouhNo ratings yet
- Conditional Sentences in NT Greek Ruben VideiraDocument62 pagesConditional Sentences in NT Greek Ruben Videiraruviso100% (1)
- Case Study On Global Branding - DuluxDocument18 pagesCase Study On Global Branding - DuluxAakriti NegiNo ratings yet
- French Ox Cheek Stew with MushroomsDocument2 pagesFrench Ox Cheek Stew with MushroomsMihai LeancăNo ratings yet
- School newspaper report teaches Present PerfectDocument2 pagesSchool newspaper report teaches Present PerfectMiro MiroNo ratings yet
- Materials Science & Engineering A: Alena Kreitcberg, Vladimir Brailovski, Sylvain TurenneDocument10 pagesMaterials Science & Engineering A: Alena Kreitcberg, Vladimir Brailovski, Sylvain TurenneVikrant Saumitra mm20d401No ratings yet
- IRC-114-2013 Use of Silica Fume in Rigid PavementDocument14 pagesIRC-114-2013 Use of Silica Fume in Rigid PavementZakee MohamedNo ratings yet
- Understanding Urbanization & Urban Community DevelopmentDocument44 pagesUnderstanding Urbanization & Urban Community DevelopmentS.Rengasamy89% (28)
- Bronchogenic CarcinomaDocument13 pagesBronchogenic Carcinomaloresita_rebongNo ratings yet
- Sequence TransformationDocument2 pagesSequence Transformationbrown222No ratings yet
- TG KPWKPDocument8 pagesTG KPWKPDanmar CamilotNo ratings yet
- Avanto Magnet System Error MessagesDocument21 pagesAvanto Magnet System Error MessagesMuhammad Ahmad75% (4)
- Palo Alto Firewall VirtualizationDocument394 pagesPalo Alto Firewall VirtualizationRyanb378No ratings yet
- Diwali - An Overview of The Festival of LightsDocument3 pagesDiwali - An Overview of The Festival of LightsSumeetNo ratings yet
- Vikash Kumar: 1. Aunico India May 2018Document4 pagesVikash Kumar: 1. Aunico India May 2018Rama Krishna PandaNo ratings yet
- 3.5 Lonaphala S A3.99 PiyaDocument9 pages3.5 Lonaphala S A3.99 PiyaPiya_TanNo ratings yet
- RRC Igc1Document6 pagesRRC Igc1kabirNo ratings yet
- Plate Tectonics LessonDocument3 pagesPlate Tectonics LessonChristy P. Adalim100% (2)
- EAPP Module 5Document10 pagesEAPP Module 5Ma. Khulyn AlvarezNo ratings yet
- Scope of Incubator CentersDocument3 pagesScope of Incubator Centersanon_542600428No ratings yet
- Viscosity IA - CHEMDocument4 pagesViscosity IA - CHEMMatthew Cole50% (2)
- System Bus in Computer Architecture: Goran Wnis Hama AliDocument34 pagesSystem Bus in Computer Architecture: Goran Wnis Hama AliGoran WnisNo ratings yet
- RCC Lintel and Slab PlanDocument3 pagesRCC Lintel and Slab PlanSaurabh Parmar 28No ratings yet
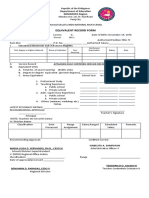
- Equivalent Record Form: Department of Education MIMAROPA RegionDocument1 pageEquivalent Record Form: Department of Education MIMAROPA RegionEnerita AllegoNo ratings yet
- French Revolution ChoiceDocument3 pagesFrench Revolution Choiceapi-483679267No ratings yet
- Radial Drill Catalog-110620Document14 pagesRadial Drill Catalog-110620Anto SiminNo ratings yet
- The Seven Seals of Revelation and The SevenDocument14 pagesThe Seven Seals of Revelation and The Sevenyulamula100% (2)
- A Strategic Management PaperDocument7 pagesA Strategic Management PaperKarll Brendon SalubreNo ratings yet
- Report Vortex TubeDocument68 pagesReport Vortex TubePravinSharmaNo ratings yet