You might also like
- Protection FundamentalsDocument12 pagesProtection FundamentalsGeorge AsuncionNo ratings yet
- C8 Generator and Generator-Transformer ProtectionDocument46 pagesC8 Generator and Generator-Transformer ProtectionShailesh Chetty100% (1)
- 09-Overcurrent ProtectionDocument30 pages09-Overcurrent ProtectionSristick83% (6)
- 1990 2004.yamaha - Yfm350x.warrior - Factory.service - ManualDocument3 pages1990 2004.yamaha - Yfm350x.warrior - Factory.service - ManualBobbi Jo Bach-Oachs50% (2)
- RC2 Series Screw Compressor Maintenance ManualDocument161 pagesRC2 Series Screw Compressor Maintenance ManualMichele CassiniNo ratings yet
- 21-Relay Testing and CommissioningDocument28 pages21-Relay Testing and CommissioningSristick100% (4)
- 21-Relay Testing and CommissioningDocument28 pages21-Relay Testing and CommissioningSristick100% (4)
- 17-Generator and Generator Transf ProtDocument35 pages17-Generator and Generator Transf ProtSristick100% (7)
- 08-Protection Signalling and TrippingDocument10 pages08-Protection Signalling and TrippingSristick100% (2)
- 06-Current and VoltageDocument19 pages06-Current and VoltageSristick100% (2)
- Relay SchneiderDocument797 pagesRelay SchneiderBảo NguyễnNo ratings yet
- 15 Busbar ProtectionDocument21 pages15 Busbar ProtectionSristick100% (8)
- 13-Protection of Complex TransmissionDocument16 pages13-Protection of Complex TransmissionSristick100% (2)
- Omicron ProtectionDocument188 pagesOmicron ProtectionBoobesh Kumar Sekar100% (4)
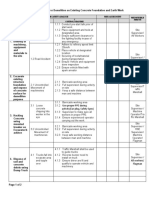
- ULSADO-JSA-Demolation Existing Concrete FoundationDocument2 pagesULSADO-JSA-Demolation Existing Concrete FoundationKelvin Tan75% (4)
- 12-Distance Protection SchemesDocument9 pages12-Distance Protection SchemesSristick100% (1)
- Motor Protection Calculation Tool User's Manual and Technical DescriptionDocument11 pagesMotor Protection Calculation Tool User's Manual and Technical DescriptionRaman JainNo ratings yet
- C9 A.C. Motor ProtectionDocument18 pagesC9 A.C. Motor ProtectionShailesh ChettyNo ratings yet
- 25-Distribution System AutomationDocument12 pages25-Distribution System AutomationSristick100% (3)
- Power AmplifierDocument37 pagesPower AmplifierSristick100% (6)
- Basler Transformer Protection Application Guide PDFDocument33 pagesBasler Transformer Protection Application Guide PDFAbrakain69No ratings yet
- C7 Transformer and Transformer Feeder ProtectionDocument28 pagesC7 Transformer and Transformer Feeder ProtectionShailesh ChettyNo ratings yet
- Practical Power System and Protective Relays CommissioningFrom EverandPractical Power System and Protective Relays CommissioningRating: 4.5 out of 5 stars4.5/5 (10)
- 20-Protection of AC Elec RailDocument18 pages20-Protection of AC Elec RailSristick100% (3)
- 20-Protection of AC Elec RailDocument18 pages20-Protection of AC Elec RailSristick100% (3)
- Differential ProtectionDocument36 pagesDifferential Protectionsayan duttaNo ratings yet
- Maximum Pressure Rating Schedule 160, Schedule 40 and Schedule 80 - Engineers EdgeDocument5 pagesMaximum Pressure Rating Schedule 160, Schedule 40 and Schedule 80 - Engineers EdgeDevanshu KrNo ratings yet
- IEEE Tutorial On The Protection of The Synchronous GeneratorsDocument113 pagesIEEE Tutorial On The Protection of The Synchronous Generatorsعبدالله نعمان آلزبيدي100% (1)
- 24-Substation Control and AutomationDocument20 pages24-Substation Control and AutomationSristick90% (10)
- OmicronDocument12 pagesOmicrondaryl62650% (2)
- 14 Auto ReclosingDocument14 pages14 Auto ReclosingSristick100% (6)
- Symmetrical Componet Fauly CalculationDocument522 pagesSymmetrical Componet Fauly CalculationsreedharNo ratings yet
- 10 Unit ProtectionDocument18 pages10 Unit ProtectionSristick100% (1)
- Protection Handbook for EngineersDocument262 pagesProtection Handbook for EngineersAna Raquel Santos86% (22)
- Voltage Transformers Type UMZDocument25 pagesVoltage Transformers Type UMZpattarawatNo ratings yet
- Motor Protection Calculation Tool For SPAM 150 C: User S Manual and Technical DescriptionDocument28 pagesMotor Protection Calculation Tool For SPAM 150 C: User S Manual and Technical Descriptionhizbi7No ratings yet
- Application Notes For Micom P12X High Impedance ProtectionDocument29 pagesApplication Notes For Micom P12X High Impedance ProtectionHaleelu Abdul Jaleel100% (1)
- Relay TrainingDocument8 pagesRelay TrainingInsan AzizNo ratings yet
- 11 Distance ProtectionDocument22 pages11 Distance ProtectionSristick100% (1)
- IEEE Guide For AC Generator ProtectionDocument76 pagesIEEE Guide For AC Generator ProtectionOmar Chayña VelásquezNo ratings yet
- 18-Industrial and CommercialDocument20 pages18-Industrial and CommercialSristick100% (3)
- 02 Thermal Motor Protection FunctionDocument36 pages02 Thermal Motor Protection FunctionDavid MendozaNo ratings yet
- 16-Transformer and Transformer Feeder ProtDocument26 pages16-Transformer and Transformer Feeder ProtSristick100% (4)
- Underfloor Wheelset Lathe: Operating / Maintenance ManualDocument84 pagesUnderfloor Wheelset Lathe: Operating / Maintenance ManualMinh Canh100% (1)
- Broken Conductor ProtectionDocument2 pagesBroken Conductor ProtectionThirumalNo ratings yet
- 05 Equivalent CircuitsDocument32 pages05 Equivalent CircuitsSristick100% (1)
- Motor ProtectionDocument31 pagesMotor ProtectionHadrien FaryalaNo ratings yet
- 114 Handy Formulae For Quantitative Aptitude ProblemsDocument12 pages114 Handy Formulae For Quantitative Aptitude ProblemsRaju.Konduru91% (69)
- SATIP-H-100-01 Rev 8Document4 pagesSATIP-H-100-01 Rev 8SajjadPervaiz100% (2)
- ETAP IEC Short Circuit Calculation MethodsDocument7 pagesETAP IEC Short Circuit Calculation MethodsvetsasNo ratings yet
- Synchronous Generator ManualDocument56 pagesSynchronous Generator ManualMartin Kratky100% (3)
- Power Engineering Training CourseDocument254 pagesPower Engineering Training Courseme_chNo ratings yet
- Development of Standards for MV Switchgear Rated for Arc ProtectionDocument15 pagesDevelopment of Standards for MV Switchgear Rated for Arc ProtectionNima MahmoudpourNo ratings yet
- IEEE CTTestingTheoryDocument53 pagesIEEE CTTestingTheoryWHann Peter ChuiNo ratings yet
- 23 Power QualityDocument11 pages23 Power QualitySristick100% (1)
- Ip Qos Principles: Theory and PracticeDocument108 pagesIp Qos Principles: Theory and Practicetest2012No ratings yet
- Cargador SLT100Document24 pagesCargador SLT100JeremyNo ratings yet
- Astm B187Document9 pagesAstm B187Plata Elpidio100% (3)
- Dimensioning of Current Transformers For Protection ApplicationsDocument9 pagesDimensioning of Current Transformers For Protection Applicationsprabhu_natarajan_n100% (1)
- B3-Industrial and Commercial Power System ProtectionDocument24 pagesB3-Industrial and Commercial Power System ProtectionShailesh ChettyNo ratings yet
- Motor Acceleration StudiesDocument8 pagesMotor Acceleration StudiesheroNo ratings yet
- Advanced-Power-System-Protection-Webinar-Aug-2020Document4 pagesAdvanced-Power-System-Protection-Webinar-Aug-2020nooralhudNo ratings yet
- 6 Paper Clasificacion de FallasDocument8 pages6 Paper Clasificacion de FallasErick ABNo ratings yet
- Motor Circuit Protector Cuttler HammerDocument4 pagesMotor Circuit Protector Cuttler Hammereastsider910No ratings yet
- MPPT Solar Charge Controller ML4830N15 InstructionsDocument13 pagesMPPT Solar Charge Controller ML4830N15 InstructionsR techNo ratings yet
- MOTRPROTDocument14 pagesMOTRPROTWendy DuncanNo ratings yet
- Why Using MCCB Instead of Fuses PDFDocument4 pagesWhy Using MCCB Instead of Fuses PDF123peniscolaNo ratings yet
- Protection and Commissioning of Multifunction Digital Transformer RelaysDocument13 pagesProtection and Commissioning of Multifunction Digital Transformer Relaysrobertovm2002No ratings yet
- Upgrading Generator Protection Using Digital TechnologyDocument8 pagesUpgrading Generator Protection Using Digital TechnologyAngel De la CruzNo ratings yet
- Lec 4 & 5 - Power System ProtectionDocument35 pagesLec 4 & 5 - Power System ProtectionAwil MohamedNo ratings yet
- ECO TECH EVO Man Install - ENDocument82 pagesECO TECH EVO Man Install - ENLeszek Leszek100% (1)
- Protection of SubstationDocument11 pagesProtection of Substationmostafa HusseinNo ratings yet
- Sunica Ni-Cd Battery Technical ManualDocument29 pagesSunica Ni-Cd Battery Technical ManualKHAYAM1982No ratings yet
- Instructions For Use and MaintenanceDocument20 pagesInstructions For Use and MaintenanceAli HashemiNo ratings yet
- SIMOREG As A Field Supply Unit PDFDocument16 pagesSIMOREG As A Field Supply Unit PDFRafaelNo ratings yet
- 9011 Digi-Tig 200 Acdc PFC MVDocument32 pages9011 Digi-Tig 200 Acdc PFC MVamrNo ratings yet
- Paper - Protection of MV - LV Substation TransformerDocument37 pagesPaper - Protection of MV - LV Substation TransformerWalter Castellanos VilcaNo ratings yet
- MPPT Solar Charge Controller User ManualDocument12 pagesMPPT Solar Charge Controller User Manualfopoku2k2No ratings yet
- Review of Loss of Excitation Protection Setting and Coordination To The Generator Capacity CurveDocument6 pagesReview of Loss of Excitation Protection Setting and Coordination To The Generator Capacity CurveAditya Ainul HaqiqiNo ratings yet
- Basic Knowledge For Protection in The Event of Overload and Short CircuitDocument24 pagesBasic Knowledge For Protection in The Event of Overload and Short CircuitMuthu KumarNo ratings yet
- Cahiertechnique N 1 9 2: Protection of MV/LV Substation TransformersDocument37 pagesCahiertechnique N 1 9 2: Protection of MV/LV Substation TransformersonyiabNo ratings yet
- Mozina2003 PDFDocument11 pagesMozina2003 PDFRobert David Guedez SierraNo ratings yet
- Electrical Machine DrawingDocument4 pagesElectrical Machine DrawingSristickNo ratings yet
- MosfetDocument13 pagesMosfetSristick100% (3)
- 22-Power Systems MeasurementsDocument11 pages22-Power Systems Measurementsapi-3769988No ratings yet
- Freq SpecDocument2 pagesFreq SpecSristickNo ratings yet
- 01 IntroductionDocument1 page01 Introductionapi-3697422No ratings yet
- 07-Relay TechnologyDocument13 pages07-Relay Technologyapi-3769988No ratings yet
- ThyristorDocument10 pagesThyristorSristick100% (2)
- Frequncy SpectrumDocument2 pagesFrequncy SpectrumSristick100% (1)
- Compressed Air Fittings & Equipment Catalogue: Importers and Direct Sellers of Quality Hand ToolsDocument18 pagesCompressed Air Fittings & Equipment Catalogue: Importers and Direct Sellers of Quality Hand ToolsVin KenNo ratings yet
- GRI - GM22 SpecificationDocument30 pagesGRI - GM22 SpecificationГригорий ЛевашовNo ratings yet
- Hydraulic: Centrifugal Pump Application Performance CurvesDocument1 pageHydraulic: Centrifugal Pump Application Performance CurvesEdwin ChavezNo ratings yet
- Effects of Cryogenic Cooling on Grinding Forces, Temperature and Residual StressesDocument9 pagesEffects of Cryogenic Cooling on Grinding Forces, Temperature and Residual StressesChirag JainNo ratings yet
- Part - I (MCQ) (Compulsory) : M A A ADocument4 pagesPart - I (MCQ) (Compulsory) : M A A AAfzaal GhaziNo ratings yet
- Turbo Machines and Propulsion Exam Questions on Pumps, Turbines, Pipe FlowDocument3 pagesTurbo Machines and Propulsion Exam Questions on Pumps, Turbines, Pipe FlowAdams100% (1)
- HF Acid Processing Valves Technical SpecificationsDocument4 pagesHF Acid Processing Valves Technical Specificationssemarasik_651536604No ratings yet
- 1.2 Beams With Uniform Load and End Moments: CHAPTER 1: Analysis of BeamsDocument8 pages1.2 Beams With Uniform Load and End Moments: CHAPTER 1: Analysis of Beamsabir ratulNo ratings yet
- Description Wincc Project Scanner enDocument9 pagesDescription Wincc Project Scanner enDugPigeonNo ratings yet
- Banyule Standard DrawingsDocument103 pagesBanyule Standard DrawingsTarek AbulailNo ratings yet
- Galaxy Electrical: Zener DiodesDocument3 pagesGalaxy Electrical: Zener Diodesdragon-red0816No ratings yet
- Rotary EvaporatorDocument3 pagesRotary EvaporatorDaryl ChianNo ratings yet
- 7 New Management ToolsDocument6 pages7 New Management ToolsKarthik SivaNo ratings yet
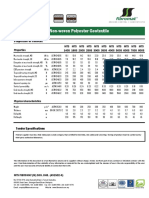
- FibrotexDocument2 pagesFibrotexMan ChupingNo ratings yet
- Introduction LetterDocument4 pagesIntroduction LetterKashifRaza0% (1)
- Solid WastesDocument47 pagesSolid WasteskevinjorgeramosNo ratings yet
- Cal Val Refile ValveDocument1 pageCal Val Refile Valvesourav samadderNo ratings yet
- WRCLA Designers HandbookDocument11 pagesWRCLA Designers HandbookHoang NguyenNo ratings yet
- Dell Operation ManagementDocument13 pagesDell Operation ManagementIsha GosainNo ratings yet
- DTH Drilling MachineDocument8 pagesDTH Drilling MachineREL PromoNo ratings yet
- Slope Stability Then and Now: Professor Emeritus, Virginia Tech, 1600 Carlson DR., Blacksburg, VA, 24060Document20 pagesSlope Stability Then and Now: Professor Emeritus, Virginia Tech, 1600 Carlson DR., Blacksburg, VA, 24060anarNo ratings yet
- AMSOIL 10W40 and 10W30 Synthetic Metric Motorycle Oils (MCT - MCF)Document2 pagesAMSOIL 10W40 and 10W30 Synthetic Metric Motorycle Oils (MCT - MCF)amsoildealerNo ratings yet