You might also like
- Cs2201 Ds Question Bank-ActDocument23 pagesCs2201 Ds Question Bank-ActactvenkatesanNo ratings yet
- BINARY TREE REPRESENTATIONS A binary tree data strucDSSDSture is represented using two methodsDocument5 pagesBINARY TREE REPRESENTATIONS A binary tree data strucDSSDSture is represented using two methodsannahian44No ratings yet
- Unit 4Document30 pagesUnit 4Vasantha KumariNo ratings yet
- Lecture 130 249 TreeDocument58 pagesLecture 130 249 TreeadityatheaaaNo ratings yet
- Data Structure and Algorithm (CS-102) : R K MohapatraDocument58 pagesData Structure and Algorithm (CS-102) : R K MohapatraadityatheaaaNo ratings yet
- DSA - TreesDocument32 pagesDSA - TreesRajan JaiprakashNo ratings yet
- @vtucode - in Module 3 DS 2022 SchemeDocument28 pages@vtucode - in Module 3 DS 2022 Schemevecom89670No ratings yet
- Advance Data Structures: TriesDocument26 pagesAdvance Data Structures: TriesStarsky Allence PuyocNo ratings yet
- Lecture 7 Data StructuresDocument34 pagesLecture 7 Data StructuresSakura2709No ratings yet
- Module 4: Trees: Data Structures and Applications (18CS32)Document20 pagesModule 4: Trees: Data Structures and Applications (18CS32)Anush L. PNo ratings yet
- IT Data Structures Chapter 3Document53 pagesIT Data Structures Chapter 3romeofatima100% (1)
- Binary TreeDocument29 pagesBinary TreeThe RockNo ratings yet
- Artigo Nó ProfundidadeDocument10 pagesArtigo Nó ProfundidadeDiogo RupoloNo ratings yet
- Assignment - IC Binary Trees SolutionsDocument34 pagesAssignment - IC Binary Trees SolutionsDrKrishna Priya ChakireddyNo ratings yet
- Linked List Data Structure & ADT ExplainedDocument65 pagesLinked List Data Structure & ADT ExplainedSriram ShankarNo ratings yet
- 4.1 Trees: Course Material (Lecture Notes) Unit Iv - Non-Linear Data StructuresDocument22 pages4.1 Trees: Course Material (Lecture Notes) Unit Iv - Non-Linear Data StructuresSuryaNo ratings yet
- Datastructures LabDocument18 pagesDatastructures LabgmerlingeorgeNo ratings yet
- Module 4 NotesDocument20 pagesModule 4 NotesvijaykumaryadavNo ratings yet
- Module 4Document41 pagesModule 4paridhi8970No ratings yet
- EE2204 DSA 100 2marksDocument18 pagesEE2204 DSA 100 2marksVinod DeenathayalanNo ratings yet
- IT T33-Data Structures: SMVEC - Department of Information Technology 1Document35 pagesIT T33-Data Structures: SMVEC - Department of Information Technology 1Mathiazhagan ArumugamNo ratings yet
- DSAL Manual Assignment 3Document14 pagesDSAL Manual Assignment 3Hide And hideNo ratings yet
- 04 BinaryTreesDocument36 pages04 BinaryTreesamitfegade121No ratings yet
- Multiway TreeDocument51 pagesMultiway Treepravin2mNo ratings yet
- Technical Question Bank: Computer ScienceDocument14 pagesTechnical Question Bank: Computer ScienceUttam SinghNo ratings yet
- cs2201 Unit1 Notes PDFDocument16 pagescs2201 Unit1 Notes PDFBal BolakaNo ratings yet
- Note 5: Tree Concept in Data Structure For ApplicationDocument9 pagesNote 5: Tree Concept in Data Structure For Applicationelasu85No ratings yet
- DS NumericalsDocument17 pagesDS NumericalsHARESHNo ratings yet
- Chapter 3-Linked ListDocument23 pagesChapter 3-Linked ListBhavesh SonawaneNo ratings yet
- CS8391 Data Structures and AlgorithmsDocument34 pagesCS8391 Data Structures and AlgorithmsShreyaNo ratings yet
- Prüfer-Like Codes For Labeled Trees: N-Node Labeled Trees and (N - 2) - Tuples of Node Labels. The ProofDocument9 pagesPrüfer-Like Codes For Labeled Trees: N-Node Labeled Trees and (N - 2) - Tuples of Node Labels. The ProofMithun GaneshNo ratings yet
- Regno: Name: Cse 102 - Data Structures and Algorithms - D1 & D2Document12 pagesRegno: Name: Cse 102 - Data Structures and Algorithms - D1 & D2mansurNo ratings yet
- DS Unit2 Answers of QBDocument3 pagesDS Unit2 Answers of QBrbcollege123No ratings yet
- Data StructureDocument68 pagesData StructurelingkaranNo ratings yet
- Unit IV Trees Concepts and TraversalsDocument107 pagesUnit IV Trees Concepts and TraversalsIan Dave D. EjercitoNo ratings yet
- Lecture 6-Trees and Binary Trees: Data Structure and Algorithm AnalysisDocument34 pagesLecture 6-Trees and Binary Trees: Data Structure and Algorithm AnalysisBemnet ZewgeNo ratings yet
- Data StructureDocument26 pagesData Structurezafri nordinNo ratings yet
- Linked Lists: Data StructureDocument50 pagesLinked Lists: Data StructureNikki AggarwalNo ratings yet
- Data Structures and AlgorithmsDocument33 pagesData Structures and AlgorithmsPhilipkithekaNo ratings yet
- Trees' Basics: B.B. Karki, LSU 1 CSC 3102Document13 pagesTrees' Basics: B.B. Karki, LSU 1 CSC 3102Arihant KhanagondNo ratings yet
- 03 - Linked List II (L) - R5 - OkDocument13 pages03 - Linked List II (L) - R5 - Okbryan chandraNo ratings yet
- Data Structure Multiple Choice Questions - AdmissionaddaDocument13 pagesData Structure Multiple Choice Questions - AdmissionaddaAshwini Nayani67% (3)
- Linked List in Data StructureDocument58 pagesLinked List in Data StructureNahid HasanNo ratings yet
- Programming and Problem Solving Module5Document8 pagesProgramming and Problem Solving Module5Victor SarmacharjeeNo ratings yet
- Chap 7 TreesDocument55 pagesChap 7 TreesBhavin PanchalNo ratings yet
- A. 2451 B. 4950 C. 4851 D. 9900Document48 pagesA. 2451 B. 4950 C. 4851 D. 9900Jayesh Shinde0% (1)
- 21CS32 Module 4Document25 pages21CS32 Module 4mocoking007No ratings yet
- Information On Binary Trees: DatabaseDocument1 pageInformation On Binary Trees: DatabaseSantosh SharmaNo ratings yet
- Tree TraversalsDocument7 pagesTree TraversalsAditya GaurNo ratings yet
- DataStructureQuestionsDocument43 pagesDataStructureQuestionsErol TetikNo ratings yet
- Ds 1Document18 pagesDs 1Ankur JainNo ratings yet
- CS1151 Data Structures Course at Jayam CollegeDocument29 pagesCS1151 Data Structures Course at Jayam CollegejayaprabamcaNo ratings yet
- Data Structures A Algorithms Multiple Choset 3Document6 pagesData Structures A Algorithms Multiple Choset 3syrissco123No ratings yet
- BTreeDocument55 pagesBTreeLuigy MachacaNo ratings yet
- A Genetic Algorithm For Constructing Compact Binary Decision TreesDocument13 pagesA Genetic Algorithm For Constructing Compact Binary Decision TreesTony WariboNo ratings yet
- Using Top Trees For Easy Programming of Tree AlgorithmsDocument12 pagesUsing Top Trees For Easy Programming of Tree AlgorithmsnothardNo ratings yet
- BCS304-Module-4 NotesDocument30 pagesBCS304-Module-4 Notesjexehif373No ratings yet
- Synopsys Part1Document2 pagesSynopsys Part1Deepika SinghNo ratings yet
- M4 SortingDocument125 pagesM4 Sortingresmi_ngNo ratings yet
- M2 - Linear Data StructuresDocument215 pagesM2 - Linear Data Structuresresmi_ngNo ratings yet
- M1 Data StructuresDocument120 pagesM1 Data Structuresresmi_ngNo ratings yet
- Image Reconstruction From ProjectionsDocument110 pagesImage Reconstruction From Projectionsresmi_ngNo ratings yet
- Image Enhancement Frequency DomainDocument42 pagesImage Enhancement Frequency Domainresmi_ng100% (2)
- Image Compression FundamentalsDocument84 pagesImage Compression Fundamentalsresmi_ng85% (13)
- Image Compression Coding SchemesDocument96 pagesImage Compression Coding Schemesresmi_ng50% (4)
- Data Structures and AlgorithmsDocument610 pagesData Structures and Algorithmsresmi_ng75% (4)
- Image RestorationDocument91 pagesImage Restorationresmi_ng91% (11)
- Image Enhancement Spatial DomainDocument94 pagesImage Enhancement Spatial Domainresmi_ng100% (2)
- Fourier TransformDocument63 pagesFourier Transformresmi_ng100% (2)
- Linear SystemsDocument15 pagesLinear Systemsresmi_ngNo ratings yet
- Image TransformsDocument11 pagesImage Transformsresmi_ngNo ratings yet
- Elements of Visual PerceptionDocument102 pagesElements of Visual Perceptionresmi_ng80% (10)
- Digital Image Processing FundamentalsDocument43 pagesDigital Image Processing Fundamentalsresmi_ng86% (7)
- Chobani: The Falling First Mover: Jianan LiaoDocument5 pagesChobani: The Falling First Mover: Jianan Liaowofop34547No ratings yet
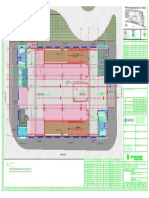
- Key plan and area statement comparison for multi-level car park (MLCPDocument1 pageKey plan and area statement comparison for multi-level car park (MLCP121715502003 BOLLEMPALLI BINDU SREE SATYANo ratings yet
- Using Social Stories With Students With Social Emotional and Behavioral Disabilities The Promise and The Perils (2019)Document17 pagesUsing Social Stories With Students With Social Emotional and Behavioral Disabilities The Promise and The Perils (2019)SarahNo ratings yet
- Syllabus: Android Training Course: 1. JAVA ConceptsDocument6 pagesSyllabus: Android Training Course: 1. JAVA ConceptsVenkata Rao GudeNo ratings yet
- What Are The Main Purpose of Financial Planning AnDocument2 pagesWhat Are The Main Purpose of Financial Planning AnHenry L BanaagNo ratings yet
- Msme'S Premium Product Catalogue Book 2020: Craft CategoryDocument50 pagesMsme'S Premium Product Catalogue Book 2020: Craft CategoryTomikoVanNo ratings yet
- Anectodal RecordsDocument10 pagesAnectodal RecordsSchahyda ArleyNo ratings yet
- CeramicsDocument39 pagesCeramicsD4-dc1 Kelas100% (1)
- The Minecraft Survival Quest ChallengeDocument4 pagesThe Minecraft Survival Quest Challengeapi-269630780100% (1)
- CT2003 LevelMeasurementP1 TechReport1 1Document27 pagesCT2003 LevelMeasurementP1 TechReport1 1Vignesh RajanNo ratings yet
- Watson Studio - IBM CloudDocument2 pagesWatson Studio - IBM CloudPurvaNo ratings yet
- The Barber of SevilleDocument1 pageThe Barber of SevilleAine MulveyNo ratings yet
- Servo LubesDocument2 pagesServo LubesVignesh VickyNo ratings yet
- Exhibit 1 18 116 PDFDocument27 pagesExhibit 1 18 116 PDFSimonNo ratings yet
- TBEM CII Exim Bank Award ComparisonDocument38 pagesTBEM CII Exim Bank Award ComparisonSamNo ratings yet
- Rate of Change: Example 1 Determine All The Points Where The Following Function Is Not ChangingDocument5 pagesRate of Change: Example 1 Determine All The Points Where The Following Function Is Not ChangingKishamarie C. TabadaNo ratings yet
- Attaei PDFDocument83 pagesAttaei PDFHandsomē KumarNo ratings yet
- Bid Document Vol. II Attachment BOQDocument6 pagesBid Document Vol. II Attachment BOQHrityush ShivamNo ratings yet
- Accenture Faq For New JoinersDocument4 pagesAccenture Faq For New JoinersBaazinow Hack Brainbaazi Live AnswersNo ratings yet
- User Interface Analysis and Design TrendsDocument38 pagesUser Interface Analysis and Design TrendsArbaz AliNo ratings yet
- Micro810 Allen Bradley User ManualDocument120 pagesMicro810 Allen Bradley User ManualStefano MontiNo ratings yet
- English Assignment AnswersDocument4 pagesEnglish Assignment AnswersAfidaNo ratings yet
- Chapter 2 ResearchDocument14 pagesChapter 2 ResearchabibualNo ratings yet
- Newman News January 2017 EditionDocument12 pagesNewman News January 2017 EditionSonya MathesonNo ratings yet
- CompReg 13SEPTEMBER2023Document2,725 pagesCompReg 13SEPTEMBER2023syed pashaNo ratings yet
- CamScanner Scanned PDF DocumentDocument205 pagesCamScanner Scanned PDF DocumentNabila Tsuroya BasyaNo ratings yet
- Chapter 4-Market EquilibriumDocument24 pagesChapter 4-Market EquilibriumAiman Daniel100% (2)
- How COVID-19 Affects Corporate Financial Performance and Corporate Valuation in Bangladesh: An Empirical StudyDocument8 pagesHow COVID-19 Affects Corporate Financial Performance and Corporate Valuation in Bangladesh: An Empirical StudyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- tmp1AE2 TMPDocument8 pagestmp1AE2 TMPFrontiersNo ratings yet
- Particle: Conceptual PropertiesDocument5 pagesParticle: Conceptual PropertieskirolosseNo ratings yet