You might also like
- 4 - Lecture IV (Tort Law) PDFDocument18 pages4 - Lecture IV (Tort Law) PDFMahmoud El-MahdyNo ratings yet
- 2 - Lecture II - Law and EthicsDocument43 pages2 - Lecture II - Law and EthicsMahmoud El-MahdyNo ratings yet
- Numerical Analysis MATH-602 Quiz 001 Time 20 Minutes: Mathematics Department Prof. Dr. Gerd BaumannDocument2 pagesNumerical Analysis MATH-602 Quiz 001 Time 20 Minutes: Mathematics Department Prof. Dr. Gerd BaumannMahmoud El-MahdyNo ratings yet
- Orthogonal Polynomials Extra ProblemsDocument6 pagesOrthogonal Polynomials Extra ProblemsMahmoud El-MahdyNo ratings yet
- Final Revision Part2Document8 pagesFinal Revision Part2Mahmoud El-MahdyNo ratings yet
- Control Lect1Document12 pagesControl Lect1Mahmoud El-MahdyNo ratings yet
- 1 - Legislation, Contracts & Engineering Ethics - Lecture 1 - October 17-2013 PDFDocument18 pages1 - Legislation, Contracts & Engineering Ethics - Lecture 1 - October 17-2013 PDFMahmoud El-MahdyNo ratings yet
- Final Revision Part1Document12 pagesFinal Revision Part1Mahmoud El-MahdyNo ratings yet
- Lect 2Document25 pagesLect 2Mahmoud El-MahdyNo ratings yet
- 1.1 Gaussian Numerical Integration ContinuedDocument33 pages1.1 Gaussian Numerical Integration ContinuedMahmoud El-MahdyNo ratings yet
- Roots of Equations: 1.0.1 Newton's MethodDocument20 pagesRoots of Equations: 1.0.1 Newton's MethodMahmoud El-MahdyNo ratings yet
- Lecture 011Document58 pagesLecture 011Mahmoud El-MahdyNo ratings yet
- DC Part 2Document29 pagesDC Part 2Mahmoud El-Mahdy100% (1)
- Roots of Equations: K K K + K K K + K KDocument17 pagesRoots of Equations: K K K + K K K + K KMahmoud El-MahdyNo ratings yet
- Lecture 008Document15 pagesLecture 008Mahmoud El-MahdyNo ratings yet
- DC Part 1-1Document19 pagesDC Part 1-1Mahmoud El-Mahdy100% (1)
- Paper70 ICARA2004 401 407Document7 pagesPaper70 ICARA2004 401 407Mahmoud El-MahdyNo ratings yet
- Paper70 ICARA2004 401 407Document7 pagesPaper70 ICARA2004 401 407Mahmoud El-MahdyNo ratings yet
- Tcs 230Document10 pagesTcs 230MuseByKeaneNo ratings yet
- HMC5843Document19 pagesHMC5843Cihat Sami GüngörNo ratings yet
- May 7, 2009 18:13 WSPC - Proceedings Trim Size: 9in X 6in Autonomous ClimbingDocument8 pagesMay 7, 2009 18:13 WSPC - Proceedings Trim Size: 9in X 6in Autonomous ClimbingMahmoud El-MahdyNo ratings yet
- Polynomial Approximation by Least Squares: Distance in A Vector SpaceDocument6 pagesPolynomial Approximation by Least Squares: Distance in A Vector SpaceMahmoud El-MahdyNo ratings yet
- Roots of Equations: K K K + K K K + K KDocument17 pagesRoots of Equations: K K K + K K K + K KMahmoud El-MahdyNo ratings yet
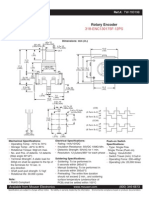
- Rotary EncoderDocument1 pageRotary EncoderMahmoud El-MahdyNo ratings yet
- Lecture 009Document23 pagesLecture 009Mahmoud El-MahdyNo ratings yet
- Lecture 005Document17 pagesLecture 005Mahmoud El-MahdyNo ratings yet
- Technical Report - Circuits (Fall 2007)Document5 pagesTechnical Report - Circuits (Fall 2007)Mahmoud El-MahdyNo ratings yet
- 10 1 1 116 1392Document142 pages10 1 1 116 1392Mahmoud El-MahdyNo ratings yet
- Metal Detector-Project ReportDocument26 pagesMetal Detector-Project ReportTimK77% (52)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 33/11 KV Sub StationDocument61 pages33/11 KV Sub StationRatnesh KumarNo ratings yet
- 2200SRM1266 (06 2006) Uk enDocument28 pages2200SRM1266 (06 2006) Uk enEbied Yousif Aly100% (9)
- SPDT and SPST Relay Guide: Types, Diagrams & Common UsesDocument2 pagesSPDT and SPST Relay Guide: Types, Diagrams & Common UsesAngah SyafiqNo ratings yet
- Staircase DetailDocument1 pageStaircase Detailأعرف أعرفNo ratings yet
- LED Lighting Design GuideDocument34 pagesLED Lighting Design GuideFormerru100% (1)
- GENSET PROFILEDocument44 pagesGENSET PROFILEMichał BujaraNo ratings yet
- Bulletin 700-HF: Miniature Square Base Ice-Cube RelayDocument2 pagesBulletin 700-HF: Miniature Square Base Ice-Cube RelayporterurmstonNo ratings yet
- Catálogo Interruptor Siemens GMI PDFDocument20 pagesCatálogo Interruptor Siemens GMI PDFhesse21No ratings yet
- Standby Diesel GeneratorDocument8 pagesStandby Diesel GeneratorPiee SyafieNo ratings yet
- Input Devices of ComputersDocument10 pagesInput Devices of ComputersHumbert KhyriemNo ratings yet
- Corrugated Steel Pipe Manning's n ValuesDocument1 pageCorrugated Steel Pipe Manning's n ValuesRamiro Bernal HernandezNo ratings yet
- Osram Luxpointmini 2Document8 pagesOsram Luxpointmini 2Phạm Lê Quốc ToànNo ratings yet
- Basic Tips, Tricks & Tools For Wiring Your VehicleDocument10 pagesBasic Tips, Tricks & Tools For Wiring Your VehicleConrad SternNo ratings yet
- Self Excited AVR Operation Manual for 15A GeneratorsDocument6 pagesSelf Excited AVR Operation Manual for 15A GeneratorsTimmyJuriNo ratings yet
- Catalogue Havells Contactors and Overload RelaysDocument84 pagesCatalogue Havells Contactors and Overload Relayssiddhant103No ratings yet
- Tonepad BluesbreakerDocument2 pagesTonepad BluesbreakerReska Andree RachmawanNo ratings yet
- Izbor Osigurača Odvodnika PrenaponaDocument5 pagesIzbor Osigurača Odvodnika PrenaponaMarko ŠuvačkiNo ratings yet
- MP150 Spot DV Service ManualDocument16 pagesMP150 Spot DV Service ManualSilverio SogorbNo ratings yet
- Service Manual: Washing Machine Frontloader AWG 853Document9 pagesService Manual: Washing Machine Frontloader AWG 853Luis RolaNo ratings yet
- Tai Lieu Ev3200 Door (Sanjin)Document63 pagesTai Lieu Ev3200 Door (Sanjin)Anh CaoNo ratings yet
- Giulia HeadlightsDocument17 pagesGiulia HeadlightsJuan ZetinoNo ratings yet
- Hardware Manual Drive Module Trolley For ACS800-04, ACS800-U4, ACS800-04M With Option +H354 and ACS800-07Document16 pagesHardware Manual Drive Module Trolley For ACS800-04, ACS800-U4, ACS800-04M With Option +H354 and ACS800-07Dmitriy SokolNo ratings yet
- J250 Ef TCCDocument1 pageJ250 Ef TCCbaskaranjay5502No ratings yet
- Electrical Connector Wiring Diagram PDFDocument5 pagesElectrical Connector Wiring Diagram PDFdhanysiregar100% (1)
- Understanding NEC Article 409 & UL508A SCCRDocument30 pagesUnderstanding NEC Article 409 & UL508A SCCRCrisroberson SantosNo ratings yet
- Improve crankshaft and camshaft gears Volvo enginesDocument2 pagesImprove crankshaft and camshaft gears Volvo enginesAparecidaMarquesNo ratings yet
- Automatic Transfer Switch ATS021: Installation and Operating Instructions 34ATS021 / 1SDH000759R0002Document36 pagesAutomatic Transfer Switch ATS021: Installation and Operating Instructions 34ATS021 / 1SDH000759R0002ase.olgaNo ratings yet
- Skoda Kodiaq Brake System EngDocument132 pagesSkoda Kodiaq Brake System EngFrancisco MoraNo ratings yet
- Vitality 50 Cylinder Head and Piston Service GuideDocument19 pagesVitality 50 Cylinder Head and Piston Service GuideFlanagan MatusNo ratings yet
- Door Frame Fixing ChecklistDocument1 pageDoor Frame Fixing ChecklistShyamontika Choudhury ChakrabartiNo ratings yet