You might also like
- Datastructuretries 160408155555 PDFDocument27 pagesDatastructuretries 160408155555 PDFAugusto BaffaNo ratings yet
- Data Structure: Name: Mahadi Hassan ID: 1320133042 & Name: Mahmud Rahman Parag ID: 1320900042Document168 pagesData Structure: Name: Mahadi Hassan ID: 1320133042 & Name: Mahmud Rahman Parag ID: 1320900042Augusto BaffaNo ratings yet
- Data Structure: Name: Mahadi Hassan ID: 1320133042 & Name: Mahmud Rahman Parag ID: 1320900042Document168 pagesData Structure: Name: Mahadi Hassan ID: 1320133042 & Name: Mahmud Rahman Parag ID: 1320900042Augusto BaffaNo ratings yet
- Networking Multiplayer PDFDocument48 pagesNetworking Multiplayer PDFAugusto BaffaNo ratings yet
- PRESTO A Predictive Storage Architecture For Sensor NetworksDocument6 pagesPRESTO A Predictive Storage Architecture For Sensor NetworksAugusto BaffaNo ratings yet
- Ultra-Low Power Data Storage For Sensor NetworksDocument8 pagesUltra-Low Power Data Storage For Sensor NetworksAugusto BaffaNo ratings yet
- Programming A Sensor Network in A Layered Middleware Architecture PDFDocument27 pagesProgramming A Sensor Network in A Layered Middleware Architecture PDFAugusto BaffaNo ratings yet
- Datastructuretries 160408155555 PDFDocument27 pagesDatastructuretries 160408155555 PDFAugusto BaffaNo ratings yet
- Networking Multiplayer PDFDocument48 pagesNetworking Multiplayer PDFAugusto BaffaNo ratings yet
- Maze Generation and Solving Maze Generation and Solving: A Puzzle Game Using Real Generation - Time MazeDocument4 pagesMaze Generation and Solving Maze Generation and Solving: A Puzzle Game Using Real Generation - Time MazeAugusto BaffaNo ratings yet
- Efficient Data Aggregation Middleware For Wireless Sensor NetworksDocument10 pagesEfficient Data Aggregation Middleware For Wireless Sensor NetworksAugusto BaffaNo ratings yet
- An Open Flexible and Multilevel Data Storing and Processing Platform For Very Large Scale Sensor Network - 2012Document5 pagesAn Open Flexible and Multilevel Data Storing and Processing Platform For Very Large Scale Sensor Network - 2012Augusto BaffaNo ratings yet
- TSAR A Two Tier Sensor Storage Architecture Using Interval Skip GraphsDocument12 pagesTSAR A Two Tier Sensor Storage Architecture Using Interval Skip GraphsAugusto BaffaNo ratings yet
- PRESTO Feedback-Driven Data Management in Sensor NetworksDocument14 pagesPRESTO Feedback-Driven Data Management in Sensor NetworksAugusto BaffaNo ratings yet
- Hood A Neighborhood Abstraction For Sensor Networks - 2004Document12 pagesHood A Neighborhood Abstraction For Sensor Networks - 2004Augusto BaffaNo ratings yet
- Agimone Middleware Support For Seamless Integration of Sensor and IP NetworksDocument18 pagesAgimone Middleware Support For Seamless Integration of Sensor and IP NetworksAugusto BaffaNo ratings yet
- Agimone Middleware Support For Seamless Integration of Sensor and IP NetworksDocument18 pagesAgimone Middleware Support For Seamless Integration of Sensor and IP NetworksAugusto BaffaNo ratings yet
- An Online Prediction Framework For Sensor NetworksDocument6 pagesAn Online Prediction Framework For Sensor NetworksAugusto BaffaNo ratings yet
- For Data Compression and Prediction: Learning in Wireless Sensor NetworksDocument60 pagesFor Data Compression and Prediction: Learning in Wireless Sensor NetworksAugusto BaffaNo ratings yet
- p1629 GaberDocument2 pagesp1629 GaberAugusto BaffaNo ratings yet
- An Efficient Heuristic For Selecting Active Nodes in Wireless Sensor NetworksDocument20 pagesAn Efficient Heuristic For Selecting Active Nodes in Wireless Sensor NetworksAugusto BaffaNo ratings yet
- Battery Lifetime Prediction Model For A WSN PlatformDocument6 pagesBattery Lifetime Prediction Model For A WSN PlatformAugusto BaffaNo ratings yet
- Energy-Aware Data Processing Techniques ForWSNDocument23 pagesEnergy-Aware Data Processing Techniques ForWSNAugusto BaffaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Petitioner Respondents: Omar Villarba, Court of Appeals and People of The PhilippinesDocument19 pagesPetitioner Respondents: Omar Villarba, Court of Appeals and People of The PhilippinesJakie CruzNo ratings yet
- FBAI Final ReportDocument14 pagesFBAI Final ReportSrishti JoshiNo ratings yet
- sn40b Maunal - OcrDocument108 pagessn40b Maunal - OcrNewNo ratings yet
- Manual Videoporteiro Tuya Painel de Chamada 84218Document6 pagesManual Videoporteiro Tuya Painel de Chamada 84218JGC CoimbraNo ratings yet
- IR2016 2020 BrochureDocument4 pagesIR2016 2020 BrochureGabiNo ratings yet
- GKB Data Analytics Mandate Part 2Document9 pagesGKB Data Analytics Mandate Part 2Vilma TejadaNo ratings yet
- Nexus FP PDFDocument48 pagesNexus FP PDFPeter MkamaNo ratings yet
- Cambodian School of Prosthetics and Orthotics: CSPO ManualDocument60 pagesCambodian School of Prosthetics and Orthotics: CSPO ManualBilalNo ratings yet
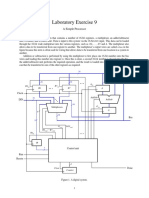
- Laboratory Exercise 9: A Simple ProcessorDocument8 pagesLaboratory Exercise 9: A Simple ProcessorhxchNo ratings yet
- Fault Code: 352 Sensor Supply 1 Circuit - Voltage Below Normal or Shorted To Low SourceDocument3 pagesFault Code: 352 Sensor Supply 1 Circuit - Voltage Below Normal or Shorted To Low SourceFernando AguilarNo ratings yet
- Lesson Plans: Pre A1 Starters Reading & Writing Part 2 - Teacher's NotesDocument5 pagesLesson Plans: Pre A1 Starters Reading & Writing Part 2 - Teacher's NotesRon ChowdhuryNo ratings yet
- Nano-C ENDocument1 pageNano-C ENMartín CoronelNo ratings yet
- P. L. MacKendrick - Roman ColonizationDocument9 pagesP. L. MacKendrick - Roman ColonizationAnyád ApádNo ratings yet
- Age of Unreason and Modernity's ContradictionsDocument4 pagesAge of Unreason and Modernity's ContradictionsKhaled Aryan ArmanNo ratings yet
- ISO 15184 Paint Hardness TesterDocument6 pagesISO 15184 Paint Hardness TesterAvinash SilimkarNo ratings yet
- Efficient Production of Mannosylerythritol Lipids With High Hydrophilicity by Pseudozyma Hubeiensis KM-59Document10 pagesEfficient Production of Mannosylerythritol Lipids With High Hydrophilicity by Pseudozyma Hubeiensis KM-59sushidombeNo ratings yet
- Electric VehiclesDocument15 pagesElectric VehiclesJai ChawlaNo ratings yet
- Bilge Oily Water SeparatorDocument25 pagesBilge Oily Water Separatornguyenvanhai19031981100% (2)
- Why Filipinos Are PoorDocument2 pagesWhy Filipinos Are PoorAzee OdtohanNo ratings yet
- CarpentaryDocument10 pagesCarpentaryvikrantNo ratings yet
- CAM/CIM Process and NC Part Programming FundamentalsDocument16 pagesCAM/CIM Process and NC Part Programming FundamentalsRakhi Mol BVNo ratings yet
- Strategies in Teaching Social Studies Inductive and Deductive Andragogy vs. PedagogyDocument31 pagesStrategies in Teaching Social Studies Inductive and Deductive Andragogy vs. PedagogyArvie VillegasNo ratings yet
- HIlbro SurgicalDocument70 pagesHIlbro Surgicalshazay_7733% (3)
- Nuclear Power Corporation of India LimitedDocument11 pagesNuclear Power Corporation of India Limitedkevin desaiNo ratings yet
- Analisis API 1160Document201 pagesAnalisis API 1160Francisco SánchezNo ratings yet
- Evaluation of Completeness of Mother and Child Protection (MCP) Card in Bishnupur District, ManipurDocument5 pagesEvaluation of Completeness of Mother and Child Protection (MCP) Card in Bishnupur District, ManipurInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- DKK1413 - Chapter 04-1Document37 pagesDKK1413 - Chapter 04-1Salini ShaNo ratings yet
- Test BankDocument14 pagesTest BankB1111815167 WSBNo ratings yet
- Pushover Analysis As Per EC8Document23 pagesPushover Analysis As Per EC8mihaitimofteNo ratings yet
- List Megacom 04 Maret 2011Document3 pagesList Megacom 04 Maret 2011伟汉 陈No ratings yet