You might also like
- BLTouch Setup ManualDocument7 pagesBLTouch Setup ManualBobbyNo ratings yet
- Udoo Pinout DiagramDocument1 pageUdoo Pinout DiagramAlexandruNo ratings yet
- 2015/1/14 14:29:03 E:/Work/CAN-BUS Shield/CAN-BUS Shield v1.2/CAN-BUS Shield v1.2 SCH - pcb/CAN-BUS Shield v1.2.sch (Sheet: 1/2)Document1 page2015/1/14 14:29:03 E:/Work/CAN-BUS Shield/CAN-BUS Shield v1.2/CAN-BUS Shield v1.2 SCH - pcb/CAN-BUS Shield v1.2.sch (Sheet: 1/2)Alexandru100% (1)
- IFEM AppBDocument27 pagesIFEM AppBJitesh570No ratings yet
- FRDM-KL46Z User's ManualDocument17 pagesFRDM-KL46Z User's ManualAlexandru100% (1)
- RAMPS FD SchematicDocument9 pagesRAMPS FD SchematicAlexandru100% (2)
- Getting Started with ESPlorer IDE for ESP8266 DevelopmentDocument18 pagesGetting Started with ESPlorer IDE for ESP8266 DevelopmenttedimiyiNo ratings yet
- MatricesDocument212 pagesMatricesMichelle Rose RoxasNo ratings yet
- MicroCube 3D PrinterDocument22 pagesMicroCube 3D PrinterAlexandruNo ratings yet
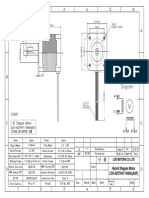
- Ldo 42STH47 1684aDocument1 pageLdo 42STH47 1684aAlexandruNo ratings yet
- MicroCube 3D PrinterDocument22 pagesMicroCube 3D PrinterAlexandruNo ratings yet
- Pism Report Nato EngDocument132 pagesPism Report Nato EngAlexandruNo ratings yet
- Getting Started with ESPlorer IDE for ESP8266 DevelopmentDocument18 pagesGetting Started with ESPlorer IDE for ESP8266 DevelopmenttedimiyiNo ratings yet
- GDM 320240 04Document18 pagesGDM 320240 04AlexandruNo ratings yet
- Udoo ManualDocument46 pagesUdoo ManualAlexandru100% (1)
- The Logic of Collective ActionDocument23 pagesThe Logic of Collective ActionAlexandruNo ratings yet
- Heat Sink Selection GuideDocument19 pagesHeat Sink Selection GuideKishore BhatNo ratings yet
- Three-Level ANPCDocument85 pagesThree-Level ANPCAlexandru100% (1)
- Three-Level ANPCDocument85 pagesThree-Level ANPCAlexandru100% (1)
- HB en 2006 - NATO PDFDocument405 pagesHB en 2006 - NATO PDFsetiawanaji407No ratings yet
- Strom 2006Document15 pagesStrom 2006AlexandruNo ratings yet
- Instructions Us Spykee VoxDocument25 pagesInstructions Us Spykee VoxAlexandru0% (1)
- HB en 2006 - NATO PDFDocument405 pagesHB en 2006 - NATO PDFsetiawanaji407No ratings yet
- Heating Effect of Electric Current: Electricity IDocument7 pagesHeating Effect of Electric Current: Electricity IAlexandruNo ratings yet
- IranDocument241 pagesIranAlexandru100% (2)
- Dir 635Document93 pagesDir 635AlexandruNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Admission Form All 2019 1Document8 pagesAdmission Form All 2019 1Riz WanNo ratings yet
- Biopolymers - Sustainability For The Automotive Value-Added ChainDocument4 pagesBiopolymers - Sustainability For The Automotive Value-Added ChainDiana LondoñoNo ratings yet
- Literature Review 26 JuneDocument42 pagesLiterature Review 26 JuneSanjeev NehruNo ratings yet
- (2012) A Greenhouse Gas Accounting Tool For Palm Products (RSPO - PalmGHG Beta Version 1)Document56 pages(2012) A Greenhouse Gas Accounting Tool For Palm Products (RSPO - PalmGHG Beta Version 1)anon_369860093No ratings yet
- A Comprehensive Review On The Genus: Mussaenda: Astalakshmi N and Sundara Ganapathy RDocument8 pagesA Comprehensive Review On The Genus: Mussaenda: Astalakshmi N and Sundara Ganapathy RSahabat Baljai100% (1)
- Spectroscopy Primer AnswersDocument13 pagesSpectroscopy Primer AnswersjayshreeNo ratings yet
- Kluebersynth GEM 4 N GB enDocument6 pagesKluebersynth GEM 4 N GB enIvan MarijanovićNo ratings yet
- Improved Conductivity and Mechanism of Carrier Transport in Zinc Oxide With Embedded Silver LayerDocument8 pagesImproved Conductivity and Mechanism of Carrier Transport in Zinc Oxide With Embedded Silver LayerAbdul BasitNo ratings yet
- TubingDocument6 pagesTubingkevin wongNo ratings yet
- Essay On StalinDocument8 pagesEssay On Stalinfz6zke9m100% (2)
- Current Concepts in Orthopaedic Biomaterials and Implant FixationDocument24 pagesCurrent Concepts in Orthopaedic Biomaterials and Implant FixationS.ENo ratings yet
- Makrolon® ET3137: Grades / ExtrusionDocument4 pagesMakrolon® ET3137: Grades / ExtrusionDiegoTierradentroNo ratings yet
- Ips e PR 850 PDFDocument73 pagesIps e PR 850 PDFdeyanshu7No ratings yet
- Food Preservatives and Their Harmful EffDocument2 pagesFood Preservatives and Their Harmful EffJo ShuNo ratings yet
- Application News: Infrared Spectra of Polyvinyl ChlorideDocument2 pagesApplication News: Infrared Spectra of Polyvinyl ChlorideRudiyansah RudiyansahNo ratings yet
- Presentation1. AEC GeoTech LANDFILLDocument22 pagesPresentation1. AEC GeoTech LANDFILLAyan BorgohainNo ratings yet
- Removal of Hardness 1Document35 pagesRemoval of Hardness 1KISHAN PATELNo ratings yet
- Whirlpool Adp 533 WHDocument12 pagesWhirlpool Adp 533 WHGustavo ValdezNo ratings yet
- Technology Guide No. 19: SSPC: The Society For Protective CoatingsDocument3 pagesTechnology Guide No. 19: SSPC: The Society For Protective CoatingsMia AndinoNo ratings yet
- Photos of Defects Found in RadiographyDocument14 pagesPhotos of Defects Found in RadiographyKavipriyan KaviNo ratings yet
- Chloroplast, PPTDocument21 pagesChloroplast, PPTSuchitra Sk88% (8)
- A STUDY ON THE ECOFRIENDLY DYES EXTRACTED FROM THREE DIFFERENT SPECIES OF Curcuma LDocument3 pagesA STUDY ON THE ECOFRIENDLY DYES EXTRACTED FROM THREE DIFFERENT SPECIES OF Curcuma Lanon_285184956No ratings yet
- Chapter 5 CasesDocument21 pagesChapter 5 Casesejusdem generisNo ratings yet
- Filter Elements, Parts for Compressors and EnginesDocument2 pagesFilter Elements, Parts for Compressors and Enginespgm900No ratings yet
- Properties of WaterDocument3 pagesProperties of WaterLupis HernándezNo ratings yet
- Introduction To R.T.P.P: 1.1 GeneralDocument12 pagesIntroduction To R.T.P.P: 1.1 GeneralSairam Kumar ChowdaryNo ratings yet
- დ მიქელაძის-ბიოქიმიაDocument201 pagesდ მიქელაძის-ბიოქიმიაJuli JulianaNo ratings yet
- Assignment 2Document1 pageAssignment 2Varun PahujaNo ratings yet
- Nucleic Acids BrochureDocument2 pagesNucleic Acids BrochureCring-cring NavarroNo ratings yet