You might also like
- Notes PDE Pt1Document23 pagesNotes PDE Pt1Wati KaNo ratings yet
- Introduction To PDEsDocument14 pagesIntroduction To PDEszeeshan_scribdNo ratings yet
- PdeDocument110 pagesPdeHammadNo ratings yet
- Applications of Partial Differential EquationsDocument8 pagesApplications of Partial Differential EquationsSaiVenkatNo ratings yet
- FEM3Document22 pagesFEM3Paul RebourNo ratings yet
- Diffusion EquationDocument22 pagesDiffusion EquationAuwais AhmedNo ratings yet
- Introduction To Partial Differential Equations - G. E. Urroz (NM)Document25 pagesIntroduction To Partial Differential Equations - G. E. Urroz (NM)Tony StarkNo ratings yet
- DIFFYQS PDEs, Separation of Variables, and The Heat EquationDocument12 pagesDIFFYQS PDEs, Separation of Variables, and The Heat EquationLG TVNo ratings yet
- Solution Using Separation of VariablesDocument12 pagesSolution Using Separation of Variablespeter.gomes20087216No ratings yet
- ODES: Ordinary Differential EquationsDocument7 pagesODES: Ordinary Differential EquationsYogi Firman AndikaNo ratings yet
- CMfAA Notes Chapter2Document29 pagesCMfAA Notes Chapter2Nicolas BrughmansNo ratings yet
- BVPsDocument18 pagesBVPsGEORGE FRIDERIC HANDELNo ratings yet
- Notes On Partial Differential Equations (Theory)Document129 pagesNotes On Partial Differential Equations (Theory)Elhibari OthmaneNo ratings yet
- Heat Equation Guide for Solving PDE ProblemsDocument17 pagesHeat Equation Guide for Solving PDE ProblemsCadodiNo ratings yet
- Partial Differential Equations I: Basics and Separable SolutionsDocument20 pagesPartial Differential Equations I: Basics and Separable SolutionsbobpasxalNo ratings yet
- Chapter 20Document12 pagesChapter 20Ariana Ribeiro LameirinhasNo ratings yet
- Mathematics For Electrical Engineering I: Dr. G.A. PavliotisDocument67 pagesMathematics For Electrical Engineering I: Dr. G.A. PavliotisKhoirul WaladNo ratings yet
- Fourier Series & Its Application in Solving PDEsDocument27 pagesFourier Series & Its Application in Solving PDEsMEET CHAJJEDNo ratings yet
- Analysis2011 PDFDocument235 pagesAnalysis2011 PDFMirica Mihai AntonioNo ratings yet
- Questão 2 Mais CompletaDocument20 pagesQuestão 2 Mais CompletaparrotgentileNo ratings yet
- Partial Differential EquationsDocument42 pagesPartial Differential EquationsPragya ChakshooNo ratings yet
- Com PdeDocument313 pagesCom PdeHam KarimNo ratings yet
- Chapter 12: Partial Differential EquationsDocument11 pagesChapter 12: Partial Differential EquationsDark bOYNo ratings yet
- Exact Solutions For Drying With Coupled Phase-Change in A Porous Medium With A Heat Flux Condition On The SurfaceDocument19 pagesExact Solutions For Drying With Coupled Phase-Change in A Porous Medium With A Heat Flux Condition On The SurfaceSérgio A CruzNo ratings yet
- 4 Partial Differential Equations: Z y X XDocument5 pages4 Partial Differential Equations: Z y X XJohn Wanyoike MakauNo ratings yet
- Solving 2nd Order Linear Differential EquationsDocument11 pagesSolving 2nd Order Linear Differential EquationsDilham WahyudiNo ratings yet
- Helm (2008) : Section 32.4: Parabolic PdesDocument24 pagesHelm (2008) : Section 32.4: Parabolic Pdestarek mahmoudNo ratings yet
- Partial Differential Equations (Pdes)Document5 pagesPartial Differential Equations (Pdes)uploadingpersonNo ratings yet
- Analysis of The Lorenz GaugeDocument16 pagesAnalysis of The Lorenz GaugeharishkumarsinghNo ratings yet
- CE603: Partial Differential Equations (Instructor's Scribble) Expected OutcomeDocument12 pagesCE603: Partial Differential Equations (Instructor's Scribble) Expected OutcomeShreshth SinghNo ratings yet
- One-Dimensional Heat Equation - Notes 1Document6 pagesOne-Dimensional Heat Equation - Notes 1bvs957946No ratings yet
- Chapter 1 - IntroductionDocument13 pagesChapter 1 - IntroductionNajat AlbarakatiNo ratings yet
- Section 9-6: Heat Equation With Non-Zero Temperature BoundariesDocument4 pagesSection 9-6: Heat Equation With Non-Zero Temperature BoundariesGilgamesh69No ratings yet
- The Schrödinger Equation. A Particle in A One-Dimensional BoxDocument11 pagesThe Schrödinger Equation. A Particle in A One-Dimensional BoxPrateek GhaiNo ratings yet
- Exercises 7Document2 pagesExercises 7Jeremy Mac LeanNo ratings yet
- Alberto Bressan and Yuxi Zheng - Conservative Solutions To A Nonlinear Variational Wave EquationDocument30 pagesAlberto Bressan and Yuxi Zheng - Conservative Solutions To A Nonlinear Variational Wave EquationPonmijNo ratings yet
- PhysicsDocument27 pagesPhysicsAnthony David Altamirano De La CruzNo ratings yet
- PARTIAL DIFFERENTIAL EQUATIONS I IntroduDocument25 pagesPARTIAL DIFFERENTIAL EQUATIONS I IntrodusimaNo ratings yet
- LECTURE 2 First Week Functions of Several Vareables S2 2015-2016Document19 pagesLECTURE 2 First Week Functions of Several Vareables S2 2015-2016FaIz FauziNo ratings yet
- Lecture Notes on Numerical Analysis of Partial Differential EquationsDocument62 pagesLecture Notes on Numerical Analysis of Partial Differential Equationsmohammad affanNo ratings yet
- MIT18 S096F13 Lecnote21Document7 pagesMIT18 S096F13 Lecnote21piwipebaNo ratings yet
- CH 10.5: Separation of Variables Heat Conduction in A RodDocument20 pagesCH 10.5: Separation of Variables Heat Conduction in A RodArial96No ratings yet
- Pure Soliton Solutions of Some Nonlinear Partial Differential EquationsDocument8 pagesPure Soliton Solutions of Some Nonlinear Partial Differential EquationsHamid MojiryNo ratings yet
- Articulo Periodic Oscillations of The Relativistic Pendulum With FrictionDocument2 pagesArticulo Periodic Oscillations of The Relativistic Pendulum With FrictionHumberto ValadezNo ratings yet
- Ito's and Tanaka's Type Formulae For The Stochastic Heat Equation: The Linear CaseDocument25 pagesIto's and Tanaka's Type Formulae For The Stochastic Heat Equation: The Linear CaselycancapitalNo ratings yet
- 1.1 Motivation: X X 2 I J 2 X X X XDocument4 pages1.1 Motivation: X X 2 I J 2 X X X XpincoNo ratings yet
- Transient Heat Conduction: Analytical MethodsDocument41 pagesTransient Heat Conduction: Analytical MethodsjagayaNo ratings yet
- Pde PDFDocument49 pagesPde PDFsachin guptaNo ratings yet
- Exam FENE 2122Document6 pagesExam FENE 2122Lluís TorresNo ratings yet
- PDEDocument39 pagesPDEchandra kantNo ratings yet
- SepvarDocument10 pagesSepvarKanthavel ThillaiNo ratings yet
- PDEs Notes 1Document15 pagesPDEs Notes 19cvxx9nqbfNo ratings yet
- Ecuaciones Integrales 1Document6 pagesEcuaciones Integrales 1GuillermoEatonNo ratings yet
- PDE13Document13 pagesPDE13Mihir KumarNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- Freaks (1932) : Dysmorphisms, Solidarity and Revenge: Miguel Abad VilaDocument8 pagesFreaks (1932) : Dysmorphisms, Solidarity and Revenge: Miguel Abad VilabbteenagerNo ratings yet
- Usb-C: The Next Cable RevolutionDocument5 pagesUsb-C: The Next Cable RevolutionbbteenagerNo ratings yet
- Archery Tuning GuideDocument32 pagesArchery Tuning Guideserikloo100% (5)
- BDocument2 pagesBbbteenagerNo ratings yet
- 2Document2 pages2bbteenagerNo ratings yet
- XYZs-of-Oscilloscopes 03W 8605 7 PDFDocument60 pagesXYZs-of-Oscilloscopes 03W 8605 7 PDFInsideNo ratings yet
- TBS1000B Mixed Domain 3GW - 23616 - 2 - 11x17 PDFDocument1 pageTBS1000B Mixed Domain 3GW - 23616 - 2 - 11x17 PDFAshish SharmaNo ratings yet
- DDocument1 pageDbbteenagerNo ratings yet
- 3GW 20181 5 HR PDFDocument3 pages3GW 20181 5 HR PDFbbteenagerNo ratings yet
- 1Document1 page1bbteenagerNo ratings yet
- EDocument1 pageEbbteenagerNo ratings yet
- ADocument1 pageAbbteenagerNo ratings yet
- 1474704917690401Document9 pages1474704917690401bbteenagerNo ratings yet
- Trinity R&P Guitar Syllabus From 2018Document54 pagesTrinity R&P Guitar Syllabus From 2018ConcurseiroMpt0% (1)
- 3Document1 page3bbteenagerNo ratings yet
- ABCDocument49 pagesABCbbteenagerNo ratings yet
- Trinity R&P Guitar Syllabus From 2018Document2 pagesTrinity R&P Guitar Syllabus From 2018bbteenagerNo ratings yet
- Great Rhythm Gui T Ar Tone .: BY Brooke ST J AmesDocument1 pageGreat Rhythm Gui T Ar Tone .: BY Brooke ST J AmesbbteenagerNo ratings yet
- OdlfidDocument1 pageOdlfidbbteenagerNo ratings yet
- 1474704917690401Document6 pages1474704917690401bbteenagerNo ratings yet
- 1474704917690401Document9 pages1474704917690401bbteenagerNo ratings yet
- Important ! ReadmeDocument1 pageImportant ! ReadmeAngelo AngNo ratings yet
- Stu 183Document21 pagesStu 183bbteenagerNo ratings yet
- EdcbaDocument2 pagesEdcbabbteenagerNo ratings yet
- OdfsdDocument3 pagesOdfsdbbteenagerNo ratings yet
- Many HellosDocument3 pagesMany HellosbbteenagerNo ratings yet
- SadjflsjkDocument5 pagesSadjflsjkbbteenagerNo ratings yet
- CGC Chapter ListDocument22 pagesCGC Chapter ListbbteenagerNo ratings yet
- HolaDocument2 pagesHolabbteenagerNo ratings yet
- WatermarkDocument13 pagesWatermarkbbteenagerNo ratings yet
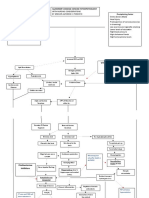
- Pathophysiology of Alzheimer's Disease With Nursing ConsiderationsDocument10 pagesPathophysiology of Alzheimer's Disease With Nursing ConsiderationsTiger Knee100% (1)
- Wicked Arrangement WickednessDocument8 pagesWicked Arrangement WickednessbenchafulNo ratings yet
- INFOSEM Final ReportDocument40 pagesINFOSEM Final ReportManasa BanothNo ratings yet
- Sea Control & Sea DenialDocument7 pagesSea Control & Sea DenialHeri OktavianNo ratings yet
- Proverbs 31 Companion WorkbookDocument70 pagesProverbs 31 Companion WorkbookRigoberto Penaflor100% (6)
- Chapter 17. Bothriocephalus Acheilognathi Yamaguti, 1934: December 2012Document16 pagesChapter 17. Bothriocephalus Acheilognathi Yamaguti, 1934: December 2012Igor YuskivNo ratings yet
- Urology: Hydronephrosis and Kidney StonesDocument13 pagesUrology: Hydronephrosis and Kidney StonesendiNo ratings yet
- Datos Practicos TIMKENDocument128 pagesDatos Practicos TIMKENneodymioNo ratings yet
- Worksheets Section 1: Develop Quality Customer Service PracticesDocument3 pagesWorksheets Section 1: Develop Quality Customer Service PracticesTender Kitchen0% (1)
- v4 Nycocard Reader Lab Sell Sheet APACDocument2 pagesv4 Nycocard Reader Lab Sell Sheet APACholysaatanNo ratings yet
- Notification of Workplace Violence Form Sarawak General HospitalDocument2 pagesNotification of Workplace Violence Form Sarawak General HospitalRomuald Leo PiongNo ratings yet
- Communication Process Quiz AnswersDocument3 pagesCommunication Process Quiz AnswersAbigail CullaNo ratings yet
- The Future of Fulfillment Asia Pacific Vision Study - Tan Aik Jin, Vertical Solutions Lead, Zebra Technologies Asia Pacific PDFDocument22 pagesThe Future of Fulfillment Asia Pacific Vision Study - Tan Aik Jin, Vertical Solutions Lead, Zebra Technologies Asia Pacific PDFSudiana WNo ratings yet
- Anaphylactic ShockDocument19 pagesAnaphylactic ShockrutiranNo ratings yet
- Fear of Allah-HW Assignment by TahiyaDocument10 pagesFear of Allah-HW Assignment by TahiyashafaqkaziNo ratings yet
- DNV RP H101 - Risk Management in Marine and Subsea OperationsDocument54 pagesDNV RP H101 - Risk Management in Marine and Subsea Operationsk-2100% (1)
- Dilkeswar PDFDocument21 pagesDilkeswar PDFDilkeshwar PandeyNo ratings yet
- PACIFICO B. ARCEO, JR, Jr. vs. People of The Philippines, G.R. No. 142641, 17 July 2006Document1 pagePACIFICO B. ARCEO, JR, Jr. vs. People of The Philippines, G.R. No. 142641, 17 July 2006Sonson VelosoNo ratings yet
- Critical Reading As ReasoningDocument18 pagesCritical Reading As ReasoningKyle Velasquez100% (2)
- Bail and Right To Bail in IndiaDocument43 pagesBail and Right To Bail in IndiaAkshar Haritwal100% (3)
- Crisostomo Et Al. v. Atty. Nazareno, A.C. No. 6677, June 10, 2014Document6 pagesCrisostomo Et Al. v. Atty. Nazareno, A.C. No. 6677, June 10, 2014Pamela TambaloNo ratings yet
- Comparative Constitutional Law IsDocument7 pagesComparative Constitutional Law IsНикита РудницкийNo ratings yet
- Article 9 of Japan ConstitutionDocument32 pagesArticle 9 of Japan ConstitutionRedNo ratings yet
- Solar CompendiumDocument19 pagesSolar CompendiumCasey Prohn100% (4)
- Mab, Boy, Son), Used in Patronymics See AlsoDocument46 pagesMab, Boy, Son), Used in Patronymics See AlsoEilise IrelandNo ratings yet
- Y3 Module 1 QuizDocument6 pagesY3 Module 1 QuizMohd HattaNo ratings yet
- Lesson Plan 1Document8 pagesLesson Plan 1api-573197365No ratings yet
- RIZALDocument36 pagesRIZALRichard GonowonNo ratings yet
- Operating Manual SIMARIS Therm V2 1 enDocument30 pagesOperating Manual SIMARIS Therm V2 1 enTân Ngọc TyNo ratings yet
- Fundamentals of Surveying by S.K. RoyDocument613 pagesFundamentals of Surveying by S.K. RoyChalamaiah Vadlamudi100% (1)