Code: 9A13701
1
ROBOTICS AND AUTOMATION
(Common to E.Con.E and EIE)
B.Tech IV Year I Semester (R09) Regular & Supplementary Examinations December/January 2013/14
Time: 3 hours Answer any FIVE questions All questions carry equal marks ***** 1 2
Max. Marks: 70
Discuss the anatomy of robot. Explain the important parts of a robot with a neat sketch. Explain briefly about: (a) Pneumatic drives (b) Tactile sensors (c) Fiber optic sensors Define gripper. Explain about mechanical grippers. Explain the two ways of constraining the part in gripper. Explain briefly about: (a) Electronic manipulators (b) Pneumatic manipulators (a) Describe the general properties of inverse kinematic problems. (b) What are the different hill climbing techniques? Explain one method. (a) Explain in detail about different software packages available for robotics. (b) Explain briefly about robot programming. Explain the applications of robots in manufacturing and non-manufacturing units. Derive an expression for the derivative of a time varying rotation matrix with respect to time in terms of skew symmetric matrix and itself.
7 8
*****
Code: 9A13701
2
ROBOTICS AND AUTOMATION
(Common to E.Con.E and EIE)
B.Tech IV Year I Semester (R09) Regular & Supplementary Examinations December/January 2013/14
Time: 3 hours Answer any FIVE questions All questions carry equal marks ***** 1
Max. Marks: 70
A part weighing is to be grasped by a mechanical gripper using friction between and the coefficient of two opposing fingers. The coefficient of static friction is dynamic friction is The direction of acceleration force is parallel to the contacting surfaces of the gripper fingers. Which value of the coefficient of friction is appropriate to use in the force calculations. Why? Compute the required gripper force assuming that the g-factor of is applicable. Define robot. Explain the laws of Asimov. Classify the robots based upon the coordinate system. Explain the principle of working of inductive type proximity sensing with the help of neat sketches. (a) Explain the differences between robot programming and traditional programming. (b) A single cubic trajectory is given by and is used over a time interval from What are the starting and final positions, velocities and accelerations? Discuss briefly material transfer applications of robot. Explain the variable structure systems for the control of manipulators. Explain the method of expressing the translational velocities of an object moving in space. How does direct kinematics differ from inverse kinematics? Discuss Euler angle representation for orientation.
5 6 7
*****
Code: 9A13701
3
ROBOTICS AND AUTOMATION
(Common to E.Con.E and EIE)
B.Tech IV Year I Semester (R09) Regular & Supplementary Examinations December/January 2013/14
Time: 3 hours Answer any FIVE questions All questions carry equal marks ***** 1 2 Give the detailed classification of robot arm based on motion control.
Max. Marks: 70
Draw the control circuit of the two d.o.f planar robot with pneumatic actuator control circuit. Explain the procedure. (a) Discuss about the three laws of robotics. (b) Explain the polar coordinate robot with a neat sketch. Make a list of laminations of two dimension vision systems. Explain in detail about Euler formations with an example. What are the different hill climbing techniques? Explain any three methods. Explain the applications of robots in manufacturing and non-manufacturing applications. Explain the different languages and software packages available for robots.
4 5 6 7 8
*****
Code: 9A13701
4
ROBOTICS AND AUTOMATION
(Common to E.Con.E and EIE)
B.Tech IV Year I Semester (R09) Regular & Supplementary Examinations December/January 2013/14
Time: 3 hours Answer any FIVE questions All questions carry equal marks ***** 1 2 Define robot. Explain the classification of robotics in detail.
Max. Marks: 70
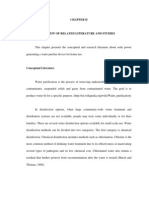
Explain the principle of working of inductive type proximity sensing with the help of neat sketches. Explain the force control tasks with neat sketches. Derive an expression for the linear velocity of a link as a function of translational and rotational velocities of link -1 of a manipulator. What do you mean by mechanical gripper? Explain the two ways of constraining the part in gripper. Find the direct kinematic equations for the two link planar arm shown in figure 1. Obtain the solutions for the inverse kinematics.
3 4
Figure 1. 7 (a) Discuss the characteristics of robot level languages. (b) What are the basic elements of robot languages? Explain. (a) Describe the robot cell design in briefly. (b) Describe the applications of robot in press working operation.
*****
You might also like
- rr321302 Robotics and AutomationDocument5 pagesrr321302 Robotics and AutomationSRINIVASA RAO GANTANo ratings yet
- 07a81002 RoboticsandautomationDocument8 pages07a81002 RoboticsandautomationSharanya ThirichinapalliNo ratings yet
- R7410305 RoboticsDocument1 pageR7410305 RoboticssivabharathamurthyNo ratings yet
- Mtar 102 - UtDocument2 pagesMtar 102 - Utchandra shekharNo ratings yet
- Robotics QB1Document4 pagesRobotics QB1Abhilash NandakumarNo ratings yet
- Sudharsan Engineering College: UNIT I Fundamentals of RobotsDocument7 pagesSudharsan Engineering College: UNIT I Fundamentals of RobotsmetkarthikNo ratings yet
- rr322403 RoboticsDocument5 pagesrr322403 RoboticsSRINIVASA RAO GANTANo ratings yet
- S 4933 B.E/B.Tech., Degree Examination, April/May 2004Document2 pagesS 4933 B.E/B.Tech., Degree Examination, April/May 2004Jayaprakash JayaramanNo ratings yet
- IR PYQsDocument5 pagesIR PYQsAbhishek KumarNo ratings yet
- B.E./B.Tech. DEGREE EXAMINATION ROBOTICSDocument2 pagesB.E./B.Tech. DEGREE EXAMINATION ROBOTICSkannan_kcetNo ratings yet
- Bharati Vidyapeeth College of Engineering robotics assignmentsDocument4 pagesBharati Vidyapeeth College of Engineering robotics assignmentsATHARVA KNo ratings yet
- (MT8701)Document2 pages(MT8701)Johnson Paul100% (2)
- GTU M.E. IST Semester Remedial Exam July 2011Document1 pageGTU M.E. IST Semester Remedial Exam July 2011msthackerNo ratings yet
- Ee2023 Raa Im 2013 PDFDocument4 pagesEe2023 Raa Im 2013 PDFveerapandianNo ratings yet
- Rr411406 RoboticsDocument4 pagesRr411406 RoboticsSrinivasa Rao GNo ratings yet
- RR 410308 RoboticsDocument4 pagesRR 410308 RoboticsSRINIVASA RAO GANTANo ratings yet
- Rr420305 RoboticsDocument7 pagesRr420305 RoboticsandhracollegesNo ratings yet
- NR 420502 RoboticsDocument7 pagesNR 420502 RoboticsSrinivasa Rao GNo ratings yet
- Department of Mechatronics Engineering Unit Test-1Document1 pageDepartment of Mechatronics Engineering Unit Test-1Senthil Kumar PNo ratings yet
- Answer Any Two Full Questions, Each Carries 15 Marks.: Pages: 2Document2 pagesAnswer Any Two Full Questions, Each Carries 15 Marks.: Pages: 2Andrew JeromiasNo ratings yet
- Mca 405 BDocument2 pagesMca 405 Bkola0123No ratings yet
- 13A03702 Automation & RoboticsDocument1 page13A03702 Automation & Roboticsrammohan reddyNo ratings yet
- Second Assignment Questions of IRDocument3 pagesSecond Assignment Questions of IRChadaram JagadishNo ratings yet
- Robotics Exam Questions Covering Kinematics, Jacobians, and ControlDocument7 pagesRobotics Exam Questions Covering Kinematics, Jacobians, and ControlPuru GaurNo ratings yet
- Answer Part A and Any FOUR Questions From Part B & All Questions Carry Equal Marks. Part A Must Be Answered at One Place and Assume Any Missing DataDocument53 pagesAnswer Part A and Any FOUR Questions From Part B & All Questions Carry Equal Marks. Part A Must Be Answered at One Place and Assume Any Missing DataPRASANTHNo ratings yet
- 15A03708 Automation & RoboticsDocument1 page15A03708 Automation & Roboticsrammohan reddyNo ratings yet
- Robo Guide BookDocument18 pagesRobo Guide BookVenkateswar Reddy MallepallyNo ratings yet
- EC368 Robotics MODEL QUESTION PAPER WITH DETAILED ANSWER KEYDocument21 pagesEC368 Robotics MODEL QUESTION PAPER WITH DETAILED ANSWER KEYsavitha100% (2)
- 9D04202 RoboticsDocument1 page9D04202 RoboticssirishaNo ratings yet
- Question bank for robotics theory referenceDocument2 pagesQuestion bank for robotics theory referenceBHAGYESHNo ratings yet
- Industrial Robotics - Model PapersDocument3 pagesIndustrial Robotics - Model PapersraminenieNo ratings yet
- Industrial Robotics and Expert Systems Question Paper 2012Document2 pagesIndustrial Robotics and Expert Systems Question Paper 2012siraj0% (1)
- IntroductiontoRobotics October2018 B E Withcredits RegularCGPAPatternBE 6D61D056Document1 pageIntroductiontoRobotics October2018 B E Withcredits RegularCGPAPatternBE 6D61D056sumitNo ratings yet
- 13A03702 Automation and RoboticsDocument1 page13A03702 Automation and Roboticsrammohan reddyNo ratings yet
- R7410402 Electronic Measurements and InstrumentationDocument1 pageR7410402 Electronic Measurements and InstrumentationsivabharathamurthyNo ratings yet
- Mechanical Engineering Department Question Bank Robotics ApplicationsDocument4 pagesMechanical Engineering Department Question Bank Robotics ApplicationsDrBollapu SudarshanNo ratings yet
- IntroductiontoRobotics October2017 B E Withcredits RegularCGPAPatternBE 6C16ED06Document1 pageIntroductiontoRobotics October2017 B E Withcredits RegularCGPAPatternBE 6C16ED06sumitNo ratings yet
- 15A03708 Automation & RoboticsDocument2 pages15A03708 Automation & Roboticsrammohan reddyNo ratings yet
- Study of six-axis controlled pick and place robotDocument5 pagesStudy of six-axis controlled pick and place robotSwapnil DeyNo ratings yet
- Old Q.papers M.tech I SemDocument15 pagesOld Q.papers M.tech I SemallakagopichandNo ratings yet
- Ee - Ii - 1Document33 pagesEe - Ii - 1saurabh1116No ratings yet
- ME1008 Robotics Nov Dec 2007Document2 pagesME1008 Robotics Nov Dec 2007Sivaranjani VenkatramanNo ratings yet
- Printed Pages: Sub Code: MTEE033 Paper Id Roll No. M.Tech. (Sem - Ii) Theory Examination 2019-20 RoboticsDocument2 pagesPrinted Pages: Sub Code: MTEE033 Paper Id Roll No. M.Tech. (Sem - Ii) Theory Examination 2019-20 RoboticsVinod yadavNo ratings yet
- 3.a) Draw The Circuit of RC Phase-Shift Osci: Using Op-Amps. (8+7)Document1 page3.a) Draw The Circuit of RC Phase-Shift Osci: Using Op-Amps. (8+7)Madhu Krishna KarthanNo ratings yet
- B. Exam., c.-2016 Mechanical Engineering Robotics: F (Tech. SemDocument3 pagesB. Exam., c.-2016 Mechanical Engineering Robotics: F (Tech. SemmayankNo ratings yet
- R7411306 Robotics & AutomationDocument1 pageR7411306 Robotics & AutomationsivabharathamurthyNo ratings yet
- 3301-Ankit-078 128151 March2019 B E Withcredits RegularCGPAPatternBE D7BCB8D2Document2 pages3301-Ankit-078 128151 March2019 B E Withcredits RegularCGPAPatternBE D7BCB8D2sumitNo ratings yet
- 07 Rr420305-RoboticsDocument6 pages07 Rr420305-RoboticsandhracollegesNo ratings yet
- MT R07, Sup, AprilMay - 2012Document34 pagesMT R07, Sup, AprilMay - 2012N Dhanunjaya Rao BorraNo ratings yet
- Sample Industry Internship ReportDocument3 pagesSample Industry Internship ReportKamarul NizamNo ratings yet
- ECE Formula SheetDocument7 pagesECE Formula SheetMahendra ReddyNo ratings yet
- 2 Marks Question & AnswerDocument9 pages2 Marks Question & AnswerShanmuga PriyaNo ratings yet
- IntroductiontoRobotics March2018 B E Withcredits RegularCGPAPatternBE CB774709Document1 pageIntroductiontoRobotics March2018 B E Withcredits RegularCGPAPatternBE CB774709sumitNo ratings yet
- Opto-Electronics & Laser InstrumentationDocument1 pageOpto-Electronics & Laser InstrumentationReddy Kiran KDNo ratings yet
- 13A03702 Automation & RoboticsDocument2 pages13A03702 Automation & Roboticsrammohan reddyNo ratings yet
- 4364 524 RoboticsDocument2 pages4364 524 Roboticsyogesh_b_kNo ratings yet
- Compiled QB Mech 8thDocument36 pagesCompiled QB Mech 8thGyanesh RaoNo ratings yet
- Computer GraphicsDocument2 pagesComputer GraphicsAbhijith MarathakamNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Control Systems (CS) Notes As Per JntuaDocument203 pagesControl Systems (CS) Notes As Per Jntuasivabharathamurthy100% (3)
- SSC Telugu (FL) (AP)Document232 pagesSSC Telugu (FL) (AP)sivabharathamurthyNo ratings yet
- 07A4EC01 Environmental StudiesDocument1 page07A4EC01 Environmental StudiessivabharathamurthyNo ratings yet
- R7410407 Operating SystemsDocument1 pageR7410407 Operating SystemssivabharathamurthyNo ratings yet
- R7311006 Process Control InstrumentationDocument1 pageR7311006 Process Control InstrumentationsivabharathamurthyNo ratings yet
- R7312301 Transport Phenomena in BioprocessesDocument1 pageR7312301 Transport Phenomena in BioprocessessivabharathamurthyNo ratings yet
- R7311506 Operating SystemsDocument1 pageR7311506 Operating SystemssivabharathamurthyNo ratings yet
- SSC Social Textbook (AP)Document100 pagesSSC Social Textbook (AP)sivabharathamurthyNo ratings yet
- R7410506 Mobile ComputingDocument1 pageR7410506 Mobile ComputingsivabharathamurthyNo ratings yet
- R5410201 Neural Networks & Fuzzy LogicDocument1 pageR5410201 Neural Networks & Fuzzy LogicsivabharathamurthyNo ratings yet
- R7310506 Design & Analysis of AlgorithmsDocument1 pageR7310506 Design & Analysis of AlgorithmssivabharathamurthyNo ratings yet
- R7310406 Digital CommunicationsDocument1 pageR7310406 Digital CommunicationssivabharathamurthyNo ratings yet
- 9A05707 Software Project ManagementDocument4 pages9A05707 Software Project ManagementsivabharathamurthyNo ratings yet
- R7311205 Distributed DatabasesDocument1 pageR7311205 Distributed DatabasessivabharathamurthyNo ratings yet
- Code: R7311306: (Electronics & Control Engineering)Document1 pageCode: R7311306: (Electronics & Control Engineering)sivabharathamurthyNo ratings yet
- R7310206 Linear Systems AnalysisDocument1 pageR7310206 Linear Systems AnalysissivabharathamurthyNo ratings yet
- R5310406 Digital CommunicationsDocument1 pageR5310406 Digital CommunicationssivabharathamurthyNo ratings yet
- R7310306 Heat TransferDocument1 pageR7310306 Heat Transfersivabharathamurthy100% (1)
- R7310106 Engineering GeologyDocument1 pageR7310106 Engineering GeologysivabharathamurthyNo ratings yet
- 9A21506 Mechanisms & Mechanical DesignDocument8 pages9A21506 Mechanisms & Mechanical DesignsivabharathamurthyNo ratings yet
- 9A23501 Heat Transfer in BioprocessesDocument4 pages9A23501 Heat Transfer in BioprocessessivabharathamurthyNo ratings yet
- R5310204 Power ElectronicsDocument1 pageR5310204 Power ElectronicssivabharathamurthyNo ratings yet
- 9A14503 Principles of Machine DesignDocument8 pages9A14503 Principles of Machine DesignsivabharathamurthyNo ratings yet
- 9A15502 Digital System DesignDocument4 pages9A15502 Digital System Designsivabharathamurthy100% (1)
- 9A03505 Heat TransferDocument4 pages9A03505 Heat TransfersivabharathamurthyNo ratings yet
- 9A04504 Digital IC ApplicationsDocument4 pages9A04504 Digital IC ApplicationssivabharathamurthyNo ratings yet
- 9A10505 Principles of CommunicationsDocument4 pages9A10505 Principles of CommunicationssivabharathamurthyNo ratings yet
- 9A05505 Operating SystemsDocument4 pages9A05505 Operating SystemssivabharathamurthyNo ratings yet
- 9A02505 Electrical Machines-IIIDocument4 pages9A02505 Electrical Machines-IIIsivabharathamurthyNo ratings yet
- CH 9 - Spontaneity, Entropy, and Free EnergyDocument65 pagesCH 9 - Spontaneity, Entropy, and Free EnergyCharbel RahmeNo ratings yet
- MGN 363Document14 pagesMGN 363Nitin PatidarNo ratings yet
- Chapter 4-Market EquilibriumDocument24 pagesChapter 4-Market EquilibriumAiman Daniel100% (2)
- SELECTING A DISTILLATION COLUMN CONTROL STRATEGYDocument12 pagesSELECTING A DISTILLATION COLUMN CONTROL STRATEGYinstrutech0% (1)
- Grid Infrastructure Installation and Upgrade Guide Ibm Aix Power Systems 64 BitDocument284 pagesGrid Infrastructure Installation and Upgrade Guide Ibm Aix Power Systems 64 BitAntonioNo ratings yet
- Grade 5 PPT English Q4 W3 Day 2Document17 pagesGrade 5 PPT English Q4 W3 Day 2Rommel MarianoNo ratings yet
- MicroProcessadores ZelenovskyDocument186 pagesMicroProcessadores ZelenovskyDavid SantosNo ratings yet
- Joou No Gohoubi - Tate No Yuusha No Nariagari 288869 Doujin - EdoujinDocument25 pagesJoou No Gohoubi - Tate No Yuusha No Nariagari 288869 Doujin - Edoujinaura.nazhifa10020% (1)
- Cambridge O Level: Agriculture 5038/12 October/November 2020Document30 pagesCambridge O Level: Agriculture 5038/12 October/November 2020Sraboni ChowdhuryNo ratings yet
- WBLFFDocument10 pagesWBLFFMohd IzatNo ratings yet
- Ethical and Social Dimensions of Science and TechnologyDocument26 pagesEthical and Social Dimensions of Science and TechnologyKlester Kim Sauro ZitaNo ratings yet
- ENGLISH COACHING CORNER MATHEMATICS PRE-BOARD EXAMINATIONDocument2 pagesENGLISH COACHING CORNER MATHEMATICS PRE-BOARD EXAMINATIONVaseem QureshiNo ratings yet
- Urinary: Rachel Neto, DVM, MS, DACVP May 28 2020Document15 pagesUrinary: Rachel Neto, DVM, MS, DACVP May 28 2020Rachel AutranNo ratings yet
- Orgin of Life and Organic EvolutionDocument74 pagesOrgin of Life and Organic Evolutionasha.s.k100% (5)
- Semi Detailed Lesson Format BEEd 1Document2 pagesSemi Detailed Lesson Format BEEd 1Kristine BuenaventuraNo ratings yet
- Chapter 2 EnglishDocument9 pagesChapter 2 Englishdgdhdh_66No ratings yet
- Speeduino Manual-7Document16 pagesSpeeduino Manual-7Makson VieiraNo ratings yet
- Acc121 Exam1 ProblemsDocument4 pagesAcc121 Exam1 ProblemsTia1977No ratings yet
- Inbound 2500783350734459126Document3 pagesInbound 2500783350734459126SirjanNo ratings yet
- BLDG TECH Juson Assignment Lecture 1Document23 pagesBLDG TECH Juson Assignment Lecture 1Ma. Janelle GoNo ratings yet
- Installation Guide for lemonPOS POS SoftwareDocument4 pagesInstallation Guide for lemonPOS POS SoftwareHenry HubNo ratings yet
- GCAF Online Inspector Practice ExamDocument5 pagesGCAF Online Inspector Practice Examcamwills2100% (1)
- VNL-Essar Field Trial: Nairobi-KenyaDocument13 pagesVNL-Essar Field Trial: Nairobi-Kenyapoppy tooNo ratings yet
- Fundamental Powers of The State (Police Power) Ynot v. IAC Facts: Ermita Malate v. City of Manila 20 SCRA 849 (1967)Document18 pagesFundamental Powers of The State (Police Power) Ynot v. IAC Facts: Ermita Malate v. City of Manila 20 SCRA 849 (1967)Ella QuiNo ratings yet
- Philips Solar+LED Marketing StrategyDocument15 pagesPhilips Solar+LED Marketing StrategyrejinairNo ratings yet
- Cambridge Ext2 Ch1 Complex Numbers IWEBDocument62 pagesCambridge Ext2 Ch1 Complex Numbers IWEBchenNo ratings yet
- W17155 PDF EngDocument7 pagesW17155 PDF Engluis alfredo lachira coveñasNo ratings yet
- A Psychologist Explains Why Everyone Is Suddenly On TiktokDocument3 pagesA Psychologist Explains Why Everyone Is Suddenly On TiktokImen ImenNo ratings yet
- Attaei PDFDocument83 pagesAttaei PDFHandsomē KumarNo ratings yet
- Cu Unjieng V MabalacatDocument6 pagesCu Unjieng V MabalacatMp CasNo ratings yet