You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
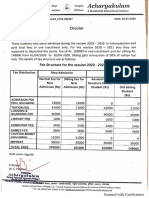
- Acharyakulam DownloadDoc 202725 Feb282020085136 PDFDocument1 pageAcharyakulam DownloadDoc 202725 Feb282020085136 PDFsubu_saxNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Authorised Branches For Rbi BondsDocument5 pagesAuthorised Branches For Rbi BondsRohit KumarNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Acharyakulam DownloadDoc 720677 Mar202020033406Document1 pageAcharyakulam DownloadDoc 720677 Mar202020033406Rohit KumarNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Production and Operations ManagementDocument284 pagesProduction and Operations Managementsnehal.deshmukh89% (28)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- DOE Fundamentals Handbook, Mechanical Science, Volume 1 of 2Document122 pagesDOE Fundamentals Handbook, Mechanical Science, Volume 1 of 2Bob VinesNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Ais 156F PDFDocument75 pagesAis 156F PDFRohit KumarNo ratings yet
- AIS 038 Rev2F PDFDocument105 pagesAIS 038 Rev2F PDFRohit KumarNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- FluidsDocument302 pagesFluidsrahul0782000No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- FluidsDocument302 pagesFluidsrahul0782000No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Ais 156F PDFDocument75 pagesAis 156F PDFRohit KumarNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- BIS battery test report summaryDocument44 pagesBIS battery test report summaryRohit Kumar100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Compression Ignition Engine CombustionDocument81 pagesCompression Ignition Engine CombustionHarish Reddy Singamala100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- XAT2011Document34 pagesXAT2011Archana NairNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Tutorial 3 2005Document6 pagesTutorial 3 2005Charanjit SinghNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- cv5788987 FileDocument5 pagescv5788987 FileAbdul SaquibNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Astm G154Document11 pagesAstm G154jesoneliteNo ratings yet
- Unit 9 - Optical AmplifierDocument55 pagesUnit 9 - Optical Amplifiervidyasawant2012No ratings yet
- Pratt & Whitney Canada: Maintenance Manual MANUAL PART NO. 3034342Document18 pagesPratt & Whitney Canada: Maintenance Manual MANUAL PART NO. 3034342EstebanNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Gas Turbine Heat Rejection and Refrigeration Cycle CalculationsDocument8 pagesGas Turbine Heat Rejection and Refrigeration Cycle CalculationsRENE JOSHUA PECASONo ratings yet
- Engineering Physics - G. AruldhasDocument100 pagesEngineering Physics - G. AruldhasJaya sankarNo ratings yet
- Improving Power System Stability Through Integrated Power System Stabilizers - 100520Document25 pagesImproving Power System Stability Through Integrated Power System Stabilizers - 100520soumyanitcNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- UNIVERSITY QUIZDocument4 pagesUNIVERSITY QUIZJericko Lian Del RosarioNo ratings yet
- Method Statement of Foundation Concrete CoatingDocument17 pagesMethod Statement of Foundation Concrete CoatingGerry Dwi PutraNo ratings yet
- Holec ERM TDRM Restart ModulesDocument6 pagesHolec ERM TDRM Restart Modules0b0biyd,u,uNo ratings yet
- 9 Electronics TDocument44 pages9 Electronics TBieonWongNo ratings yet
- Bel Ray BrochureDocument20 pagesBel Ray BrochureaditNo ratings yet
- O Level Physics 2018 Past PaperDocument20 pagesO Level Physics 2018 Past PaperfordalNo ratings yet
- Datasheet GT CT8900Document2 pagesDatasheet GT CT8900Muhammad ImranNo ratings yet
- Apd NG150Document5 pagesApd NG150Magaly PeraltaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Rotational Motion Engineering Mechanics IIT KanpurDocument67 pagesRotational Motion Engineering Mechanics IIT KanpurNitin SharmaNo ratings yet
- AZ E-Lite LED Lighting CatalogDocument2 pagesAZ E-Lite LED Lighting CatalogsujiNo ratings yet
- Screw Compressor 6C1 Series 185S 185SRDocument79 pagesScrew Compressor 6C1 Series 185S 185SRthuan100% (1)
- 02 - Chemical Equilibrium (Theory) Module-3-1Document18 pages02 - Chemical Equilibrium (Theory) Module-3-1Raju SinghNo ratings yet
- Label Odner BantexDocument4 pagesLabel Odner Bantexdana setiawanNo ratings yet
- F0358 CMM 010Document164 pagesF0358 CMM 010MJI EUWNo ratings yet
- 2013 - S2E Technical and Technological - Intro - Final PDFDocument28 pages2013 - S2E Technical and Technological - Intro - Final PDFJose Kirby100% (1)
- Installation Guide For Instrument Cables, Conduits and Cable TraysDocument35 pagesInstallation Guide For Instrument Cables, Conduits and Cable TraysImran Mohiuddin100% (1)
- Air Entrainment in Manhole Drops-Paper - Final - ReviewedDocument8 pagesAir Entrainment in Manhole Drops-Paper - Final - ReviewedManuel SueroNo ratings yet
- Unofficial Errata NewDocument194 pagesUnofficial Errata NewjohnNo ratings yet
- DC Generator: Construction and WorkingDocument7 pagesDC Generator: Construction and WorkingGlen Howell PanesNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Manta To Richmond SIMOPS Risk Matrix FINALDocument1 pageManta To Richmond SIMOPS Risk Matrix FINALDesmond Chang50% (2)
- Aeroshell Ascender: Performance, Features & Benefits Main ApplicationsDocument3 pagesAeroshell Ascender: Performance, Features & Benefits Main ApplicationsRicardo LacskoNo ratings yet
- Parts Crane Hitachi FK600 - PRDocument2 pagesParts Crane Hitachi FK600 - PRDefly Gusti100% (1)
- Depanshu Belwal Power PointDocument12 pagesDepanshu Belwal Power PointvickyvermaNo ratings yet
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)