You might also like
- VTOLT Build InstructionsDocument95 pagesVTOLT Build Instructionsnguyễn ngọc ánh100% (1)
- Giao Trinh Hop NguDocument108 pagesGiao Trinh Hop NguvuongthuongNo ratings yet
- Dieu Khien Ma Tran LedDocument14 pagesDieu Khien Ma Tran LedĐặng Vũ TrungNo ratings yet
- Dieu Khien Ma Tran LedDocument14 pagesDieu Khien Ma Tran LedĐặng Vũ TrungNo ratings yet
- Thuc Hanh Han Ho Quang 8948Document143 pagesThuc Hanh Han Ho Quang 8948nguyễn ngọc ánhNo ratings yet
- Giảng viên: Th.S Phạm Bạch DươngDocument44 pagesGiảng viên: Th.S Phạm Bạch Dươngnguyễn ngọc ánhNo ratings yet
- Autocad Mechanical ManualDocument192 pagesAutocad Mechanical ManualFrans Robert Rodriguez SanchezNo ratings yet
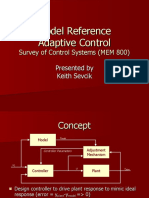
- Survey of Control Systems (MEM 800) PresentedDocument26 pagesSurvey of Control Systems (MEM 800) PresentedvananhbarcaNo ratings yet
- Robust Control Analysis and DesignDocument67 pagesRobust Control Analysis and Designnguyễn ngọc ánhNo ratings yet
- S2 08Document15 pagesS2 08nguyễn ngọc ánhNo ratings yet
- Programmable Logic ControllersDocument14 pagesProgrammable Logic ControllersMario PachecoNo ratings yet
- Presentation About MemsDocument32 pagesPresentation About Memsnguyễn ngọc ánhNo ratings yet
- Tinh Toan Thiet Ke He Dan Dong Co Khi (T1)Document272 pagesTinh Toan Thiet Ke He Dan Dong Co Khi (T1)Nguyen Xuan Quynh Trang100% (1)
- Easy PSo CDocument62 pagesEasy PSo Cnguyễn ngọc ánhNo ratings yet
- PidcontrollersDocument46 pagesPidcontrollersnguyễn ngọc ánhNo ratings yet
- Phuong Phap Luan Sang TaoDocument124 pagesPhuong Phap Luan Sang Taonguyễn ngọc ánhNo ratings yet
- Lecture 4Document9 pagesLecture 4raahanNo ratings yet
- Paton - Fundamentals of Digital Electronics With LabviewDocument82 pagesPaton - Fundamentals of Digital Electronics With Labviewlakicar2No ratings yet
- Konarka 20series 04092010Document2 pagesKonarka 20series 04092010nguyễn ngọc ánhNo ratings yet
- Auto Tuning PidDocument21 pagesAuto Tuning PidArturo CMNo ratings yet
- c02 ExDocument3 pagesc02 ExNguyễn Thành LinhNo ratings yet
- 1079Document11 pages1079nguyễn ngọc ánhNo ratings yet
- Auto Tuning PidDocument21 pagesAuto Tuning PidArturo CMNo ratings yet
- Lecture 4Document9 pagesLecture 4raahanNo ratings yet
- Survey of Control Systems (MEM 800) PresentedDocument26 pagesSurvey of Control Systems (MEM 800) PresentedvananhbarcaNo ratings yet
- Applications AD8bitDocument12 pagesApplications AD8bitnguyễn ngọc ánhNo ratings yet
- Bistable MultivibratorsDocument9 pagesBistable MultivibratorsihtishamuddNo ratings yet
- D Flip-Flop DesignDocument20 pagesD Flip-Flop Designnguyễn ngọc ánhNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Ce1a3q E1a3qDocument5 pagesCe1a3q E1a3qapi-239041842No ratings yet
- Bulb Flat Sizes, Dimensions and Weight - Steel Bulb Flats - Weight Table - Rushmore Enterprises IncDocument3 pagesBulb Flat Sizes, Dimensions and Weight - Steel Bulb Flats - Weight Table - Rushmore Enterprises IncHerlambang Miracle YudhianNo ratings yet
- 2021 International Construction Benchmark Yearbook SAMPLE 1Document10 pages2021 International Construction Benchmark Yearbook SAMPLE 1Familia GonzalezNo ratings yet
- Coils TransponderDocument4 pagesCoils TransponderGuadalajara JaliscoNo ratings yet
- Costiuc Silvia - Culas in Oltenia - CNHC 2011Document25 pagesCostiuc Silvia - Culas in Oltenia - CNHC 2011trancalina100% (1)
- Trouble ShootingDocument3 pagesTrouble Shootingsami4330No ratings yet
- List of Organisations SAR147 Apr2012Document2 pagesList of Organisations SAR147 Apr2012Tan Lian KiatNo ratings yet
- Pilot Operated Safety Relief ValvesDocument6 pagesPilot Operated Safety Relief ValvesfabioNo ratings yet
- Corrosion Types and Prevention Methods in 40 CharactersDocument75 pagesCorrosion Types and Prevention Methods in 40 CharactersCipri Croitor0% (1)
- Ccsviiid1 2029-3Document2 pagesCcsviiid1 2029-3DieguitoOmarMoralesNo ratings yet
- Espectrómetro FT-IR Nicolet Is 10Document1 pageEspectrómetro FT-IR Nicolet Is 10Adriano BludegardNo ratings yet
- Heat 4e Chap02 LectureDocument48 pagesHeat 4e Chap02 LectureAbdul MohsinNo ratings yet
- RDSO - Vendor Directory July 16 FinalDocument233 pagesRDSO - Vendor Directory July 16 Finalabhics6750% (2)
- 1.2 Beams With Uniform Load and End Moments: CHAPTER 1: Analysis of BeamsDocument8 pages1.2 Beams With Uniform Load and End Moments: CHAPTER 1: Analysis of Beamsabir ratulNo ratings yet
- Ip Qos Principles: Theory and PracticeDocument108 pagesIp Qos Principles: Theory and Practicetest2012No ratings yet
- De ShawDocument10 pagesDe ShawNishant GuptaNo ratings yet
- Diamond DA 42 Systems - V12 - 5clases 19 de JunioDocument402 pagesDiamond DA 42 Systems - V12 - 5clases 19 de JunioLiu Antonio Tang100% (1)
- N-Channel Low QG Mosfet 30V, 100A, 3.3m: MOS-TECH Semiconductor Co.,LTDDocument9 pagesN-Channel Low QG Mosfet 30V, 100A, 3.3m: MOS-TECH Semiconductor Co.,LTDAnonymous p1ig0zX6p0No ratings yet
- DISCOVERY SP-ENG V. 0.6 - Leonali 1463Document30 pagesDISCOVERY SP-ENG V. 0.6 - Leonali 1463Hanz RodriguezNo ratings yet
- Nagios Enable NRPEDocument2 pagesNagios Enable NRPEMartin RuswandaNo ratings yet
- (Developments in Geotechnical Engineering 75) Sven Hansbo (Eds.) - Foundation Engineering-Academic Press, Elsevier (1994) PDFDocument534 pages(Developments in Geotechnical Engineering 75) Sven Hansbo (Eds.) - Foundation Engineering-Academic Press, Elsevier (1994) PDFপ্রিয়দীপ প্রিয়মNo ratings yet
- Strain Gage-WhatDocument16 pagesStrain Gage-WhatAshok JoshiNo ratings yet
- Selden Keel Boat v1 LmarineriggingDocument72 pagesSelden Keel Boat v1 LmarinerigginglmarinegroupNo ratings yet
- Accumulation-Mode Varactor Optimization for 200Q RF ICsDocument2 pagesAccumulation-Mode Varactor Optimization for 200Q RF ICsmenguemengueNo ratings yet
- Vend RegDocument49 pagesVend RegProcaeHexdofNo ratings yet
- Portfolio Isaura SagredoDocument22 pagesPortfolio Isaura SagredoIsauraNo ratings yet
- Performance of A Test Embankment Constructed On An Organic Clayey Silt DepositDocument10 pagesPerformance of A Test Embankment Constructed On An Organic Clayey Silt DepositGurtejSinghChanaNo ratings yet
- Naval Arch - Incline TestDocument11 pagesNaval Arch - Incline TestDheerajKaushalNo ratings yet
- Dell Operation ManagementDocument13 pagesDell Operation ManagementIsha GosainNo ratings yet
- Customer service records for auto repairsDocument30 pagesCustomer service records for auto repairsAsad LaghariNo ratings yet