You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shock and Vibration PDFDocument211 pagesShock and Vibration PDFEnrique Lopez De ArroyabeNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Purlin and Roof DesignDocument4 pagesPurlin and Roof DesignAnilkumar Cm100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Analysis and Design of Double-Sided High-Rise Steel Pallet Rack FramesDocument46 pagesAnalysis and Design of Double-Sided High-Rise Steel Pallet Rack FrameseibrahimovicNo ratings yet
- Transformers and Tapchangers Version EDocument81 pagesTransformers and Tapchangers Version Emartinez_josel100% (1)
- Project (Exergy Analysis of Steam Power Plant)Document76 pagesProject (Exergy Analysis of Steam Power Plant)Shashi Bhushan Patel88% (8)
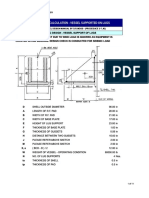
- Vessel seismic design calculationDocument11 pagesVessel seismic design calculationinnovativekarthiNo ratings yet
- RH 7x17 3000 PonudbeniDocument1 pageRH 7x17 3000 PonudbenieibrahimovicNo ratings yet
- PTP 400 Users Manual - Table of ContentsDocument8 pagesPTP 400 Users Manual - Table of ContentseibrahimovicNo ratings yet
- P008Crane P008Crane 1Document31 pagesP008Crane P008Crane 1eibrahimovicNo ratings yet
- EN 1090 Factory Production Control CertificationDocument1 pageEN 1090 Factory Production Control CertificationeibrahimovicNo ratings yet
- KBI ManufacturingDocument8 pagesKBI ManufacturingdanghpNo ratings yet
- Etag 25: Guideline For European Technical Approval OFDocument45 pagesEtag 25: Guideline For European Technical Approval OFeibrahimovicNo ratings yet
- Primeri Ec3Document0 pagesPrimeri Ec3jelenavukojeNo ratings yet
- 4 Roof SystemsDocument11 pages4 Roof SystemsFarhan KhaledNo ratings yet
- NagibDocument4 pagesNagibeibrahimovicNo ratings yet
- Beam ExpressDocument17 pagesBeam ExpresseibrahimovicNo ratings yet
- Own Cloud User ManualDocument83 pagesOwn Cloud User ManualRicardo SotoNo ratings yet
- Opterecenje Po CvoruDocument5 pagesOpterecenje Po CvorueibrahimovicNo ratings yet
- 4 Roof SystemsDocument11 pages4 Roof SystemsFarhan KhaledNo ratings yet
- 231 234 Met 54 1Document4 pages231 234 Met 54 1eibrahimovicNo ratings yet
- HBCMGbeoi 4Document4 pagesHBCMGbeoi 4eibrahimovicNo ratings yet
- Replicator 2 GuideDocument10 pagesReplicator 2 GuideeibrahimovicNo ratings yet
- Modul Blok Opis 20141224Document1 pageModul Blok Opis 20141224eibrahimovicNo ratings yet
- EBOOK PART NUMBER ANTHOLOGYDocument32 pagesEBOOK PART NUMBER ANTHOLOGYSudeep AcharyaNo ratings yet
- Pravilnik Za GermanijaDocument24 pagesPravilnik Za Germanijaeftimova_elizabetaNo ratings yet
- SolidWorks Practice Test Part 1Document23 pagesSolidWorks Practice Test Part 1eibrahimovicNo ratings yet
- Temperature and Heat: Heat Is A Flow of Energy Due To Temperature DifferencesDocument16 pagesTemperature and Heat: Heat Is A Flow of Energy Due To Temperature DifferencesPelentina SimangunsongNo ratings yet
- Ruta Al Caos PDFDocument33 pagesRuta Al Caos PDFDiego VilchesNo ratings yet
- Physics 10 Reviewer Question SheetDocument5 pagesPhysics 10 Reviewer Question SheetAntonette TabilNo ratings yet
- SEMIKRON DataSheet SKKE 15 07170871 PDFDocument4 pagesSEMIKRON DataSheet SKKE 15 07170871 PDFVinicius Veiverberg DillNo ratings yet
- fle, Tii,:v,' Jy ' TR Ijf, Q D, 4cto'r:.,ma, Ri:al' :1j::"""Document4 pagesfle, Tii,:v,' Jy ' TR Ijf, Q D, 4cto'r:.,ma, Ri:al' :1j::"""Ovidijus RučinskasNo ratings yet
- Effects of solution heat treatment on microstructure and mechanical properties of AZ61-0.7Si magnesium alloyDocument5 pagesEffects of solution heat treatment on microstructure and mechanical properties of AZ61-0.7Si magnesium alloysujit_sekharNo ratings yet
- Creep Testing Kappa SSDocument2 pagesCreep Testing Kappa SSGustavo LealNo ratings yet
- The application of the Laplace transformation to reservoir flow problemsDocument20 pagesThe application of the Laplace transformation to reservoir flow problemsYeferson TrujilloNo ratings yet
- Semianalytical Productivity Models For Perforated CompletionsDocument10 pagesSemianalytical Productivity Models For Perforated CompletionsPhước LêNo ratings yet
- Analytical Methods For The Stress Concentration Analysis of Multilayered Anisotropic Composites With Pin-Loaded HolesDocument2 pagesAnalytical Methods For The Stress Concentration Analysis of Multilayered Anisotropic Composites With Pin-Loaded Holesredmod79No ratings yet
- Chapter 7 Fourier Series: 1 Learning OutcomesDocument12 pagesChapter 7 Fourier Series: 1 Learning OutcomesMorsaleen ChowdhuryNo ratings yet
- EC8 BridgesDocument138 pagesEC8 BridgesBruno SantosNo ratings yet
- MTL Grounding Tp1121-1Document16 pagesMTL Grounding Tp1121-1mongo55No ratings yet
- Skema Latihan HabaDocument10 pagesSkema Latihan HabafizikkopuNo ratings yet
- UnifacDocument3 pagesUnifacapi-294011342No ratings yet
- UNSW Mid-Session Exam Sample for MATS2005 Fluid Dynamics and Heat TransferDocument2 pagesUNSW Mid-Session Exam Sample for MATS2005 Fluid Dynamics and Heat TransferPaulo PolloNo ratings yet
- This PDF Is The Sample PDF Taken From Our Comprehensive Study Material For IIT-JEE Main & AdvancedDocument13 pagesThis PDF Is The Sample PDF Taken From Our Comprehensive Study Material For IIT-JEE Main & Advancedannu technologyNo ratings yet
- Chapter 4 - Total Entropy Cannot DecreaseDocument93 pagesChapter 4 - Total Entropy Cannot DecreaseBananaliksNo ratings yet
- Cooling Strategies, Summer Comfort and Energy Performance of A Rehabilitated Passive Standard Office Building PDFDocument9 pagesCooling Strategies, Summer Comfort and Energy Performance of A Rehabilitated Passive Standard Office Building PDFIkutegbe CharlesNo ratings yet
- CAGAANAN - Experiment3 - Average Speed and Average VelocityDocument3 pagesCAGAANAN - Experiment3 - Average Speed and Average VelocityRairaiNo ratings yet
- Fom Lec Week 6Document35 pagesFom Lec Week 6nishan_ravin0% (1)
- Rectilinear and rotational kinematics problemsDocument5 pagesRectilinear and rotational kinematics problemsAljay Dungao40% (5)
- WIND TUNNEL NotesDocument173 pagesWIND TUNNEL Notessrikar100% (1)
- TE-2008-Chemical Pang Halimaw Na Exam Ang Hirap NG TanongSDocument40 pagesTE-2008-Chemical Pang Halimaw Na Exam Ang Hirap NG TanongSRomevie PradoNo ratings yet
- Thermodynamic Principles and Ideal Gas FunctionsDocument17 pagesThermodynamic Principles and Ideal Gas FunctionsLê Xuân NamNo ratings yet
- Laboratory Stress-Strain Tests For Developments in Geotechnical Engineering Research and PracticeDocument61 pagesLaboratory Stress-Strain Tests For Developments in Geotechnical Engineering Research and PracticeRami Mahmoud BakrNo ratings yet