You might also like
- Apuntes MATLABDocument202 pagesApuntes MATLABMariana CortezNo ratings yet
- Amplificadores de AudioDocument38 pagesAmplificadores de AudioAbel Bonifacio100% (1)
- Epidemiología BásicaDocument191 pagesEpidemiología BásicaMariana Tognoli100% (13)
- Modelo 6 Sigma PDFDocument25 pagesModelo 6 Sigma PDFpeloton10No ratings yet
- Latex - Apuntes3 - Formulas Matemáticas, Conceptos BásicosDocument20 pagesLatex - Apuntes3 - Formulas Matemáticas, Conceptos BásicosDaniel García TebaNo ratings yet
- Resumen Una Sola CosaDocument7 pagesResumen Una Sola Cosapeloton10No ratings yet
- Una Sola CosaDocument7 pagesUna Sola Cosapeloton10No ratings yet
- Apuntes 4Document11 pagesApuntes 4Juan Felipe BravoNo ratings yet
- Plan de Nacion Completo 22-11Document563 pagesPlan de Nacion Completo 22-11Cuauhtemoc PachecoNo ratings yet
- Manual Programacion Android v3Document222 pagesManual Programacion Android v3Miguel Angel Blazquez GonzalezNo ratings yet
- Apunte - María Marta SeronDocument180 pagesApunte - María Marta SeronJesús Pablo Toledo ZuccoNo ratings yet
- Manual Programacion Android v3Document222 pagesManual Programacion Android v3Miguel Angel Blazquez GonzalezNo ratings yet
- Explicaciondelindice CenevalDocument2 pagesExplicaciondelindice CenevalIramy Agustin Cordova CastilloNo ratings yet
- Apuntes 4Document11 pagesApuntes 4Juan Felipe BravoNo ratings yet
- Problem A Rio Digital 3 BCDDocument97 pagesProblem A Rio Digital 3 BCDGallito PoolNo ratings yet
- Port AdaDocument1 pagePort Adapeloton10No ratings yet
- EPIDEMIODocument45 pagesEPIDEMIOJulioCesarCabezaMoralesNo ratings yet
- Feu PDFDocument20 pagesFeu PDFpeloton10No ratings yet
- Encendiendo y Apagando CircuitosDocument13 pagesEncendiendo y Apagando CircuitosLeandro AschkarNo ratings yet
- Orcad Capture Intru Total PDFDocument219 pagesOrcad Capture Intru Total PDFpeloton10No ratings yet
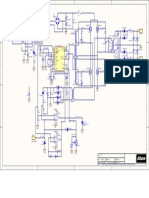
- Fuente Switching K6Document1 pageFuente Switching K6peloton10No ratings yet
- Tutorial Latex (Basico)Document36 pagesTutorial Latex (Basico)Pablo QuispeNo ratings yet
- Aprenda A Reparar Television Modulo 2 PDFDocument24 pagesAprenda A Reparar Television Modulo 2 PDFJoFfreNo ratings yet
- Capacitores IDocument28 pagesCapacitores Ipeloton10No ratings yet
- Representación de Sistemas en El Espacio de EstadosDocument22 pagesRepresentación de Sistemas en El Espacio de Estadoscosmonaut001No ratings yet
- 2 Da Clase Expresion Oral y EscritaDocument17 pages2 Da Clase Expresion Oral y Escritapeloton10No ratings yet
- Variables D EstadoDocument19 pagesVariables D EstadoAntonio Zapata MendozaNo ratings yet
- Emg 123Document7 pagesEmg 123peloton10No ratings yet
- Curso en C Desde 0Document7 pagesCurso en C Desde 0peloton10No ratings yet
- Transformada Discreta de FourierDocument39 pagesTransformada Discreta de FourierDavid YHNo ratings yet