You might also like
- Bihar State Power Transmission Company Limited: Page 1 of 29Document29 pagesBihar State Power Transmission Company Limited: Page 1 of 29Guru MishraNo ratings yet
- Selection, Installation - and - Maintenance - of - First-Aid - Fire - Extinguishers1 - IS 1290.cleanedDocument26 pagesSelection, Installation - and - Maintenance - of - First-Aid - Fire - Extinguishers1 - IS 1290.cleanedGuru MishraNo ratings yet
- Construction Manual For Lines1Document140 pagesConstruction Manual For Lines1Sapria AdiNo ratings yet
- Brass Ball ValveDocument17 pagesBrass Ball ValveRohit SinghNo ratings yet
- Is 2171 1999Document27 pagesIs 2171 1999Rao K EswarNo ratings yet
- NP Z9823 120kV EWPLDocument1 pageNP Z9823 120kV EWPLGuru MishraNo ratings yet
- TOP Z9823 120kV EWPLDocument1 pageTOP Z9823 120kV EWPLGuru MishraNo ratings yet
- 132kV, 220kV - HV GIS Spec Final DraftDocument23 pages132kV, 220kV - HV GIS Spec Final DraftTarun BhatiaNo ratings yet
- If in Doubt, Ask: Voltage (KVP)Document1 pageIf in Doubt, Ask: Voltage (KVP)Guru MishraNo ratings yet
- IBSC Z9823 120kV EWPLDocument1 pageIBSC Z9823 120kV EWPLGuru MishraNo ratings yet
- MRC Z9823 120kV EWPLDocument1 pageMRC Z9823 120kV EWPLGuru MishraNo ratings yet
- Disclosure To Promote The Right To InformationDocument23 pagesDisclosure To Promote The Right To InformationGuru MishraNo ratings yet
- POR Z9823 120kV EWPLDocument1 pagePOR Z9823 120kV EWPLGuru MishraNo ratings yet
- GA Z9823 120kV EWPLDocument1 pageGA Z9823 120kV EWPLGuru MishraNo ratings yet
- Guaranteed Technical ParticularsDocument3 pagesGuaranteed Technical ParticularsGuru MishraNo ratings yet
- CS&PR Z9823 120kV EWPLDocument1 pageCS&PR Z9823 120kV EWPLGuru MishraNo ratings yet
- Approved PGCIL DocsDocument31 pagesApproved PGCIL DocsGuru MishraNo ratings yet
- SC Z9823 120kV EWPLDocument1 pageSC Z9823 120kV EWPLGuru MishraNo ratings yet
- Is 3177.1999 EOT CranesDocument70 pagesIs 3177.1999 EOT CranesSurendra ReddyNo ratings yet
- HYDRAULIC SYSTEM FOR YARD AREADocument15 pagesHYDRAULIC SYSTEM FOR YARD AREAGuru MishraNo ratings yet
- Disclosure To Promote The Right To InformationDocument15 pagesDisclosure To Promote The Right To InformationGuru MishraNo ratings yet
- Disclosure To Promote The Right To InformationDocument32 pagesDisclosure To Promote The Right To InformationGuru MishraNo ratings yet
- ISO STDDocument4 pagesISO STDGuru MishraNo ratings yet
- Is 3938 1983 PDFDocument26 pagesIs 3938 1983 PDFavinashuklaNo ratings yet
- 73763cVDOC 132kVGADRAWINGDocument1 page73763cVDOC 132kVGADRAWINGGuru MishraNo ratings yet
- 132 KV LaDocument169 pages132 KV LaGuru MishraNo ratings yet
- Understanding the factors that influence transient recovery voltages for high-voltage circuit breakersDocument186 pagesUnderstanding the factors that influence transient recovery voltages for high-voltage circuit breakersqais652002No ratings yet
- Magnatizing CurrentDocument1 pageMagnatizing CurrentGuru MishraNo ratings yet
- 40MVA Trafo Test ProcedureDocument10 pages40MVA Trafo Test ProcedureGuru Mishra100% (3)
- Method Statement For Testing of Earth Electrode: Prepared byDocument2 pagesMethod Statement For Testing of Earth Electrode: Prepared byGuru MishraNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
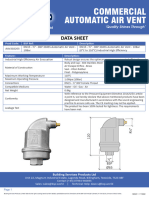
- BSP - Commercial AAV - 10bar - DataSheet - V1.1 - 11-2022Document1 pageBSP - Commercial AAV - 10bar - DataSheet - V1.1 - 11-2022j.iqubalNo ratings yet
- IECM User Manual PDFDocument583 pagesIECM User Manual PDFVishnu UppalakkalNo ratings yet
- Thermo Scientific Ramsey Oretronic III: Tramp Metal DetectorDocument2 pagesThermo Scientific Ramsey Oretronic III: Tramp Metal Detectorm2dajNo ratings yet
- Digital Signature Security ViolationsDocument5 pagesDigital Signature Security ViolationsPratiksha SonawaneNo ratings yet
- PostgreSQL: Historia, requisitos de instalación y componentes claveDocument7 pagesPostgreSQL: Historia, requisitos de instalación y componentes claveJosue AlmanzaNo ratings yet
- John Deere 7720 Parts CatalogDocument20 pagesJohn Deere 7720 Parts Catalogalejandro100% (38)
- Mini Agri Operation and Maintenance ManualDocument234 pagesMini Agri Operation and Maintenance ManualYahya KhadhraNo ratings yet
- Kirloskar Technologies P. LTD.: Appraisal FormDocument4 pagesKirloskar Technologies P. LTD.: Appraisal Formdihudi.prasantaNo ratings yet
- Scope of e - Retailing in India 4.5Document29 pagesScope of e - Retailing in India 4.5Ankit SinghNo ratings yet
- SPPC OperatorManual V100 EN 03 PDFDocument26 pagesSPPC OperatorManual V100 EN 03 PDFhaitan981No ratings yet
- B.tech. (Mechanical Engineering), 5th SemesterDocument70 pagesB.tech. (Mechanical Engineering), 5th SemesterGurdeep SinghNo ratings yet
- SURVEYING WITH A TOTAL STATIONDocument65 pagesSURVEYING WITH A TOTAL STATIONBindeshwar YadavNo ratings yet
- Apollo Saturn V Facility Description Vol. 3Document124 pagesApollo Saturn V Facility Description Vol. 3Bob Andrepont86% (7)
- Three-Phase Electric Power - Wikipedia, The Free EncyclopediaDocument12 pagesThree-Phase Electric Power - Wikipedia, The Free EncyclopediaMohamed RafihNo ratings yet
- APN-052 Directional Ground-Fault ProtectionDocument17 pagesAPN-052 Directional Ground-Fault ProtectionWalter Andres Estevez VasquezNo ratings yet
- Cyber TerrorismDocument20 pagesCyber TerrorismJane Omingo100% (1)
- A7800 PDFDocument9 pagesA7800 PDFkarkonNo ratings yet
- G6 Final Transpo-ReportDocument9 pagesG6 Final Transpo-ReportCamille Andrea SequitinNo ratings yet
- Thesis Power System SecurityDocument8 pagesThesis Power System Securitytsfublhld100% (2)
- Allama Iqbal Open University Islamabad: Assignment No. 1Document4 pagesAllama Iqbal Open University Islamabad: Assignment No. 1Hassan sherNo ratings yet
- Python Library ReferenceDocument92 pagesPython Library ReferenceaawaakNo ratings yet
- 3MZ-FE EngineDocument51 pages3MZ-FE Engineelijahcoles1990No ratings yet
- 7.SAP2000 Report With StiffenerDocument36 pages7.SAP2000 Report With StiffenerAlaa Al-habashNo ratings yet
- Theoretical PrinciplesDocument2 pagesTheoretical PrinciplesJosef JiaoNo ratings yet
- Lahan GATIBIDI 80 Asar Text Press FinalDocument89 pagesLahan GATIBIDI 80 Asar Text Press FinalRajan Kumar DahalNo ratings yet
- Preturi Octavia FL-ilovepdf-compressed-1Document18 pagesPreturi Octavia FL-ilovepdf-compressed-1Alin DanielNo ratings yet
- Green IT Project Outline and Practical ApplicationsDocument29 pagesGreen IT Project Outline and Practical ApplicationsRahul Yadav100% (1)
- Exit WM - Criação de OT'sDocument2 pagesExit WM - Criação de OT'sGabriel SouzaNo ratings yet
- TH L47E5S Panasonic+ (TNPH0993)Document60 pagesTH L47E5S Panasonic+ (TNPH0993)Luiz Gustavo SantosNo ratings yet
- Security Issues in EcommerceDocument12 pagesSecurity Issues in EcommerceDBS MANFESTNo ratings yet