You might also like
- Principio de Conservación de La Cantidad de Movimiento Lineal y AngularDocument20 pagesPrincipio de Conservación de La Cantidad de Movimiento Lineal y AngularErnesto Sánchez40% (5)
- Unidad 1 EstaticaDocument13 pagesUnidad 1 EstaticaKenya ScarletteNo ratings yet
- 5.6 Trabajo y EnergiaDocument5 pages5.6 Trabajo y EnergiaEdwin LópezNo ratings yet
- Tarea 2 (Ensayo de Los Fenómenos Naturales Que Provocan Las Deformaciones y Fracturas en Las Rocas)Document8 pagesTarea 2 (Ensayo de Los Fenómenos Naturales Que Provocan Las Deformaciones y Fracturas en Las Rocas)Enrique Viana0% (1)
- Modelacion y Simulacion de Operaciones y ProcesosDocument23 pagesModelacion y Simulacion de Operaciones y ProcesosDiego CimeNo ratings yet
- Conservación del momento: principio fundamental de la mecánicaDocument1 pageConservación del momento: principio fundamental de la mecánicaAbdi Roblero100% (1)
- Restricciones Al Movimiento Que Tienen Los Apoyos de Los Cuerpos RígidosDocument14 pagesRestricciones Al Movimiento Que Tienen Los Apoyos de Los Cuerpos Rígidosjavier gaspar100% (1)
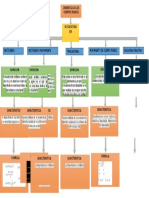
- Mapa Conceptual Cinetica de Cuerpo RigidoDocument1 pageMapa Conceptual Cinetica de Cuerpo Rigidojuan lopezNo ratings yet
- Fuerzas de Superficie y de CuerpoDocument8 pagesFuerzas de Superficie y de CuerpomayjoNo ratings yet
- 2.4 Esfuerzos y Direcciones PrincipalesDocument28 pages2.4 Esfuerzos y Direcciones PrincipalesEVELYN GARRIDO SOLORIONo ratings yet
- Unidad 3 Cinetica de ParticulasDocument3 pagesUnidad 3 Cinetica de ParticulasMONICA LIZCANONo ratings yet
- FriccionDocument30 pagesFriccionAnonymous mN7lUN8100% (1)
- Unidad 4 Cinetica de Sistemas de ParticulasDocument26 pagesUnidad 4 Cinetica de Sistemas de Particulassplinter360No ratings yet
- Unidad 1 de DinamicaDocument31 pagesUnidad 1 de Dinamicageovanny manoloNo ratings yet
- Resistencia de Materiales I: Esfuerzo normal promedioDocument19 pagesResistencia de Materiales I: Esfuerzo normal promedioFernando Quenta PeñarandaNo ratings yet
- Fricción seca: leyes y coeficientesDocument9 pagesFricción seca: leyes y coeficientesDanielElorza100% (1)
- Unidad 5 Cinetica de Los Cuerpos Rigidos en El PlanoDocument105 pagesUnidad 5 Cinetica de Los Cuerpos Rigidos en El PlanoChucho MoralesNo ratings yet
- Cuadro Sinoptico de Teoría Basica de La ElectricidadDocument2 pagesCuadro Sinoptico de Teoría Basica de La ElectricidadEtzel Ed Mej50% (2)
- 2.3 Minerales Constitutivos de Las RocasDocument1 page2.3 Minerales Constitutivos de Las RocasMariana Rubí Hernández León100% (2)
- Analisis de La ParticulaDocument10 pagesAnalisis de La ParticulaAnNa LuPita MuñozNo ratings yet
- Unidad 4 Centroides Centros de Gravedad y Momentos de InerciaDocument5 pagesUnidad 4 Centroides Centros de Gravedad y Momentos de InerciaSebastian Moreno100% (2)
- 4.2 Estimacion de La MediaDocument4 pages4.2 Estimacion de La Mediaedson jair0% (1)
- Resumen Física CBCDocument10 pagesResumen Física CBCJuan CellucciNo ratings yet
- Tema 5.8Document9 pagesTema 5.8arlalo100% (1)
- 2.2 TraslacionDocument3 pages2.2 Traslacionjosefa reyesNo ratings yet
- Mapa Conceptual-Tipos de Movimientos de Un Cuerpo Rígido-DinámicaDocument2 pagesMapa Conceptual-Tipos de Movimientos de Un Cuerpo Rígido-DinámicaAmethyst Smith50% (2)
- Segunda Ley de Newton: Fuerza y AceleraciónDocument3 pagesSegunda Ley de Newton: Fuerza y AceleraciónEuardoCar100% (1)
- Deformación Por Rotación, Deformación Lineal y AngularDocument16 pagesDeformación Por Rotación, Deformación Lineal y AngularAlexis GrijalvaNo ratings yet
- Postulado de StevinDocument1 pagePostulado de StevinAaronNo ratings yet
- Mapa Mental de Cinética de Partículas FinalDocument1 pageMapa Mental de Cinética de Partículas FinalDrastic Gamer0% (1)
- T 1.1 Mapa Conceptual Integración de Sistemas de TransporteDocument2 pagesT 1.1 Mapa Conceptual Integración de Sistemas de TransporteVictor Garrido50% (6)
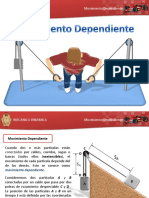
- Movimiento Dependiente PDFDocument9 pagesMovimiento Dependiente PDFMaite ZuritaNo ratings yet
- Ensayo 2 Cinetica de ParticulasDocument4 pagesEnsayo 2 Cinetica de ParticulasEdgar G. CorreaNo ratings yet
- Mapa Conceptual Josue Ramirez Bernabe.Document1 pageMapa Conceptual Josue Ramirez Bernabe.Josue Ramirez BernabeNo ratings yet
- Unidad 3 Cinética de Partículas x3Document3 pagesUnidad 3 Cinética de Partículas x3VerónicaFloresViniegraNo ratings yet
- Cuerpo RígidoDocument33 pagesCuerpo Rígidowyath14No ratings yet
- Uso del gradiente en problemas de optimización en ingenieríaDocument23 pagesUso del gradiente en problemas de optimización en ingenieríaJorge Luis Hernandez VNo ratings yet
- Linea Del TiempoDocument1 pageLinea Del TiempoDennis Benitez100% (1)
- Unidad 4 Principio de La MecanicaDocument18 pagesUnidad 4 Principio de La MecanicaItza Ocaña0% (1)
- Cuerpo Rígido y Principio de TransmisibilidadDocument10 pagesCuerpo Rígido y Principio de TransmisibilidadRicardo GuzmánNo ratings yet
- Cuadro Comparativo Hidraulica LeonardoDocument2 pagesCuadro Comparativo Hidraulica LeonardoLeonardo HernandezNo ratings yet
- Unidad 6 Estática.Document26 pagesUnidad 6 Estática.JhonyNo ratings yet
- 1.3 Tipos de EstructurasDocument2 pages1.3 Tipos de EstructurasCarlosdelaCruzNo ratings yet
- 1.2 Ubicación de La Estática y La Dinámica Dentro de La MecánicaDocument1 page1.2 Ubicación de La Estática y La Dinámica Dentro de La Mecánicaaaron josafat100% (2)
- Tipos de Movimientos de Cuerpos RigidosDocument2 pagesTipos de Movimientos de Cuerpos RigidosRudy Mamani Tapia33% (3)
- Linea de Tiempo Métodos NuméricosDocument3 pagesLinea de Tiempo Métodos NuméricosYnivuj80% (5)
- Sistemas Equivalentes de FuerzasDocument6 pagesSistemas Equivalentes de FuerzasAlex EspinozaNo ratings yet
- 2.2.2 Perforaciones Con PosteadoraDocument1 page2.2.2 Perforaciones Con Posteadoraeduardo nieto50% (2)
- Mapa MentalDocument2 pagesMapa Mentalluis alberto garcia rodriguezNo ratings yet
- Formación y Propiedad de Los Compuestos IónicosDocument4 pagesFormación y Propiedad de Los Compuestos IónicosLuis Gilberto Cuevas SalasNo ratings yet
- Cuadro Sinóptico EstáticaDocument1 pageCuadro Sinóptico EstáticaOzwaldoHernandez25% (4)
- Tabla Comparativa de Las Ecuaciones Del MovimientoDocument1 pageTabla Comparativa de Las Ecuaciones Del MovimientoCristian Escrihuela Benages100% (1)
- Cinemática de Las Partículas (Mapa Mental)Document1 pageCinemática de Las Partículas (Mapa Mental)SherlynivanovaNo ratings yet
- Unidad 5 EstaticaDocument8 pagesUnidad 5 EstaticaErickToledoNo ratings yet
- Mapa Conceptual Esfuerzos MecanicosDocument1 pageMapa Conceptual Esfuerzos Mecanicoselarr22100% (1)
- Cinemática Movimiento PartículasDocument46 pagesCinemática Movimiento PartículasYahir PgNo ratings yet
- Dinámica Unidad 2.1 Cinética de PartículasDocument11 pagesDinámica Unidad 2.1 Cinética de PartículasIwjshsNo ratings yet
- Mapa Conceptual Cinetica de Cuerpo RigidoDocument4 pagesMapa Conceptual Cinetica de Cuerpo Rigidojuan lopezNo ratings yet
- Separata-Movimiento Plano de Cuerpo RigidoDocument14 pagesSeparata-Movimiento Plano de Cuerpo RigidoIoel QcNo ratings yet
- Cinetica Del SolidoDocument33 pagesCinetica Del SolidoJorge Ysmael Rodríguez FernándezNo ratings yet