You might also like
- Efficient IRIS Recognition Through Improvement of Feature Extraction and subset SelectionDocument10 pagesEfficient IRIS Recognition Through Improvement of Feature Extraction and subset SelectionJasir CpNo ratings yet
- Enhance Iris Segmentation Method For Person Recognition Based On Image Processing TechniquesDocument10 pagesEnhance Iris Segmentation Method For Person Recognition Based On Image Processing TechniquesTELKOMNIKANo ratings yet
- A Hybrid Method For Iris SegmentationDocument5 pagesA Hybrid Method For Iris SegmentationJournal of ComputingNo ratings yet
- Iris Recognition System: A Survey: Pallavi Tiwari, Mr. Pratyush TripathiDocument4 pagesIris Recognition System: A Survey: Pallavi Tiwari, Mr. Pratyush Tripathianil kasotNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document8 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Fusion of Gabor Filter and Steerable Pyramid To Improve Iris Recognition SystemDocument9 pagesFusion of Gabor Filter and Steerable Pyramid To Improve Iris Recognition SystemIAES IJAINo ratings yet
- A Robust Iris Segmentation Scheme Based On Improved U-NetDocument8 pagesA Robust Iris Segmentation Scheme Based On Improved U-NetpedroNo ratings yet
- 1st Paper On Objective - 1Document13 pages1st Paper On Objective - 1DIVYA C DNo ratings yet
- Iris Recognition: Introduction & Basic MethodologyDocument7 pagesIris Recognition: Introduction & Basic MethodologyAnonymous 1yCAFMNo ratings yet
- Iris Based Authentication ReportDocument5 pagesIris Based Authentication ReportDragan PetkanovNo ratings yet
- Localización Confiable Del Iris Utilizando La Transformada de Hough, La Bisección de Histograma y La ExcentricidadDocument12 pagesLocalización Confiable Del Iris Utilizando La Transformada de Hough, La Bisección de Histograma y La ExcentricidadkimalikrNo ratings yet
- Human Iris Recognition Techniques Using Wavelet TransformDocument8 pagesHuman Iris Recognition Techniques Using Wavelet Transformkeerthana_ic14No ratings yet
- Iris Based Authentication System: R.Shanthi, B.DineshDocument6 pagesIris Based Authentication System: R.Shanthi, B.DineshIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Iris Scanning ReportDocument17 pagesIris Scanning ReporthunnbajajNo ratings yet
- Ijet V3i4p17Document5 pagesIjet V3i4p17International Journal of Engineering and TechniquesNo ratings yet
- Literature Review: Iris Segmentation Approaches For Iris Recognition SystemsDocument4 pagesLiterature Review: Iris Segmentation Approaches For Iris Recognition SystemsInternational Journal of computational Engineering research (IJCER)No ratings yet
- A Study of Various Soft Computing Techniques For Iris RecognitionDocument5 pagesA Study of Various Soft Computing Techniques For Iris RecognitionInternational Organization of Scientific Research (IOSR)No ratings yet
- Implementation of Reliable Open SourceDocument6 pagesImplementation of Reliable Open Sourcenilesh_092No ratings yet
- New IC PaperDocument150 pagesNew IC PaperRaja Ramesh DNo ratings yet
- Performance of Hasty and Consistent Multi Spectral Iris Segmentation Using Deep LearningDocument5 pagesPerformance of Hasty and Consistent Multi Spectral Iris Segmentation Using Deep LearningEditor IJTSRDNo ratings yet
- Efficient Iris Recognition by Characterizing Key Local VariationsDocument12 pagesEfficient Iris Recognition by Characterizing Key Local VariationsVishnu P RameshNo ratings yet
- Iris Recognition Phase Base AokiDocument16 pagesIris Recognition Phase Base AokiAlex WongNo ratings yet
- ijaerv13n10_194Document8 pagesijaerv13n10_194taehyung kimNo ratings yet
- Mpginmc 1079Document7 pagesMpginmc 1079Duong DangNo ratings yet
- An Efficient Technique For Iris Recocognition Based On Eni FeaturesDocument6 pagesAn Efficient Technique For Iris Recocognition Based On Eni FeaturesKampa LavanyaNo ratings yet
- An Approach For Secure Identification and Authentication For Biometrics Using IrisDocument4 pagesAn Approach For Secure Identification and Authentication For Biometrics Using IrisJohnny BlazeNo ratings yet
- Iris Recognition System With Frequency Domain Features Optimized With PCA and SVM ClassifierDocument9 pagesIris Recognition System With Frequency Domain Features Optimized With PCA and SVM ClassifierElprogrammadorNo ratings yet
- Periocular-Assisted Multi-Feature Collaboration For Dynamic Iris RecognitionDocument14 pagesPeriocular-Assisted Multi-Feature Collaboration For Dynamic Iris RecognitionsheelaNo ratings yet
- Iris Recognition: Existing Methods and Open Issues: NtroductionDocument6 pagesIris Recognition: Existing Methods and Open Issues: NtroductionDhimas Arief DharmawanNo ratings yet
- An Efficient Iris Segmentation Approach To Develop An Iris Recognition SystemDocument6 pagesAn Efficient Iris Segmentation Approach To Develop An Iris Recognition Systemhhakim32No ratings yet
- Optik: Hafiz Tayyab Mustafa, Jie Yang, Hamza Mustafa, Masoumeh ZareapoorDocument13 pagesOptik: Hafiz Tayyab Mustafa, Jie Yang, Hamza Mustafa, Masoumeh Zareapoorsamaneh keshavarziNo ratings yet
- Toward Accurate and Fast Iris Segmentation For Iris BiometricsDocument15 pagesToward Accurate and Fast Iris Segmentation For Iris BiometricsNithiya SNo ratings yet
- A Review On How Iris Recognition WorksDocument11 pagesA Review On How Iris Recognition WorksSathya KalaivananNo ratings yet
- 2010 - Beining Et Al - China - Finger-Vein Authentication Based On Wide Line Detector and Pattern NormalizationDocument4 pages2010 - Beining Et Al - China - Finger-Vein Authentication Based On Wide Line Detector and Pattern Normalizationsamuel limongNo ratings yet
- Fcrar2004 IrisDocument7 pagesFcrar2004 IrisPrashant PhanseNo ratings yet
- An Effective Segmentation Technique For Noisy Iris ImagesDocument8 pagesAn Effective Segmentation Technique For Noisy Iris ImagesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Atm With EyeDocument24 pagesAn Atm With EyeunweltedNo ratings yet
- Eye Recognition with Mixed Convolutional and Residual NetworkDocument1 pageEye Recognition with Mixed Convolutional and Residual NetworkKathir VelNo ratings yet
- Iris Recognition Using MATLABDocument9 pagesIris Recognition Using MATLABmanojmuthyalaNo ratings yet
- Iris RecognitionDocument14 pagesIris RecognitionAnaNo ratings yet
- Biometric Identification Using Matching Algorithm MethodDocument5 pagesBiometric Identification Using Matching Algorithm MethodInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 73 1470546684 - 07-08-2016 PDFDocument3 pages73 1470546684 - 07-08-2016 PDFEditor IJRITCCNo ratings yet
- An Embedded Real-Time Finger-Vein Recognition SystemDocument6 pagesAn Embedded Real-Time Finger-Vein Recognition SystemArun GopinathNo ratings yet
- Deep-PRWIS: Periocular Recognition Without The Iris and Sclera Using Deep Learning FrameworksDocument9 pagesDeep-PRWIS: Periocular Recognition Without The Iris and Sclera Using Deep Learning FrameworksragouNo ratings yet
- 2nd Objective PaperDocument5 pages2nd Objective PaperDIVYA C DNo ratings yet
- A Literature Review On Iris Segmentation Techniques For Iris Recognition SystemsDocument5 pagesA Literature Review On Iris Segmentation Techniques For Iris Recognition SystemsInternational Organization of Scientific Research (IOSR)No ratings yet
- Pupil detection and feature extraction algorithm for efficient Iris recognitionDocument12 pagesPupil detection and feature extraction algorithm for efficient Iris recognitionaliov mezherNo ratings yet
- Iris Pattern Recognition Using Morlet Wavelet MethodDocument5 pagesIris Pattern Recognition Using Morlet Wavelet MethodViji VasanNo ratings yet
- Change Detection of Pulmonary Embolism Using Isomeric Cluster and Computer VisionDocument12 pagesChange Detection of Pulmonary Embolism Using Isomeric Cluster and Computer VisionIAES IJAINo ratings yet
- IJIVP Vol 12 Iss 2 Paper 8 2610 2614Document5 pagesIJIVP Vol 12 Iss 2 Paper 8 2610 2614Nirwana SeptianiNo ratings yet
- Facial Recognition Using Multi Edge Detection and Distance MeasureDocument13 pagesFacial Recognition Using Multi Edge Detection and Distance MeasureIAES IJAINo ratings yet
- Iris Recognition Using Curvelet Transform Based On Principal Component Analysis and Linear Discriminant AnalysisDocument7 pagesIris Recognition Using Curvelet Transform Based On Principal Component Analysis and Linear Discriminant AnalysisTushar MukherjeeNo ratings yet
- 20th European Signal Processing Conference (EUSIPCO 2012) Bucharest, Romania, August 27 - 31, 2012Document5 pages20th European Signal Processing Conference (EUSIPCO 2012) Bucharest, Romania, August 27 - 31, 2012Jothibasu MarappanNo ratings yet
- Using 2D Haar Wavelet Transform For Iris Feature Extraction: 2010 Asia-Pacific Conference On Information TheoryDocument5 pagesUsing 2D Haar Wavelet Transform For Iris Feature Extraction: 2010 Asia-Pacific Conference On Information TheoryAswiniSamantrayNo ratings yet
- Feature Extraction of An Iris For PatternRecognitionDocument7 pagesFeature Extraction of An Iris For PatternRecognitionJournal of Computer Science and EngineeringNo ratings yet
- Deep Learning Based Eye Gaze Tracking For Automotive Applications An Auto-Keras ApproachDocument4 pagesDeep Learning Based Eye Gaze Tracking For Automotive Applications An Auto-Keras ApproachVibhor ChaubeyNo ratings yet
- S R SDocument7 pagesS R Sfaizan_keNo ratings yet
- 3Document14 pages3amk2009No ratings yet
- Review On Iris Recognition Research Directions - A Brief StudyDocument11 pagesReview On Iris Recognition Research Directions - A Brief StudyIJRASETPublicationsNo ratings yet
- Lec 2Document80 pagesLec 2Kearrake KuranNo ratings yet
- Specman e BasicsDocument27 pagesSpecman e BasicsReetika BishnoiNo ratings yet
- UVM Interview QuestionsDocument12 pagesUVM Interview QuestionsReetika BishnoiNo ratings yet
- Xapp884 PRBS GeneratorChecker PDFDocument8 pagesXapp884 PRBS GeneratorChecker PDFReetika BishnoiNo ratings yet
- Specman e LRM LatestDocument1,658 pagesSpecman e LRM LatestReetika BishnoiNo ratings yet
- Specman e LRM LatestDocument1,658 pagesSpecman e LRM LatestReetika BishnoiNo ratings yet
- E LanguageDocument4 pagesE LanguageReetika BishnoiNo ratings yet
- System Verilog ClassesDocument11 pagesSystem Verilog ClassesReetika BishnoiNo ratings yet
- CiscoDocument531 pagesCiscoReetika BishnoiNo ratings yet
- C++ TutorialDocument231 pagesC++ TutorialAnonymous 61AC6bQ100% (3)
- P 1Document3 pagesP 1Reetika BishnoiNo ratings yet
- Interfacing With MicrocontrollerDocument44 pagesInterfacing With MicrocontrollerPradeep PoojaryNo ratings yet
- Iris Scan (Iris Recognization)Document10 pagesIris Scan (Iris Recognization)sayyanNo ratings yet
- Keya PandeyDocument15 pagesKeya Pandeykeya pandeyNo ratings yet
- FT Goblin Full SizeDocument7 pagesFT Goblin Full SizeDeakon Frost100% (1)
- Lorilie Muring ResumeDocument1 pageLorilie Muring ResumeEzekiel Jake Del MundoNo ratings yet
- Model:: Powered by CUMMINSDocument4 pagesModel:: Powered by CUMMINSСергейNo ratings yet
- AnkitDocument24 pagesAnkitAnkit MalhotraNo ratings yet
- Week 3 SEED in Role ActivityDocument2 pagesWeek 3 SEED in Role ActivityPrince DenhaagNo ratings yet
- People vs. Ulip, G.R. No. L-3455Document1 pagePeople vs. Ulip, G.R. No. L-3455Grace GomezNo ratings yet
- Circular 09/2014 (ISM) : SubjectDocument7 pagesCircular 09/2014 (ISM) : SubjectDenise AhrendNo ratings yet
- ABBBADocument151 pagesABBBAJeremy MaraveNo ratings yet
- Compilation of CasesDocument121 pagesCompilation of CasesMabelle ArellanoNo ratings yet
- 4.5.1 Forestry LawsDocument31 pages4.5.1 Forestry LawsMark OrtolaNo ratings yet
- MSBI Installation GuideDocument25 pagesMSBI Installation GuideAmit SharmaNo ratings yet
- 158 Oesmer Vs Paraisa DevDocument1 page158 Oesmer Vs Paraisa DevRobelle Rizon100% (1)
- An4856 Stevalisa172v2 2 KW Fully Digital Ac DC Power Supply Dsmps Evaluation Board StmicroelectronicsDocument74 pagesAn4856 Stevalisa172v2 2 KW Fully Digital Ac DC Power Supply Dsmps Evaluation Board StmicroelectronicsStefano SalaNo ratings yet
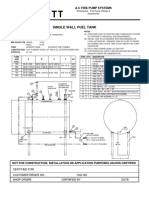
- Single Wall Fuel Tank: FP 2.7 A-C Fire Pump SystemsDocument1 pageSingle Wall Fuel Tank: FP 2.7 A-C Fire Pump Systemsricardo cardosoNo ratings yet
- Sav 5446Document21 pagesSav 5446Michael100% (2)
- Supplier Quality Requirement Form (SSQRF) : Inspection NotificationDocument1 pageSupplier Quality Requirement Form (SSQRF) : Inspection Notificationsonnu151No ratings yet
- Ebook The Managers Guide To Effective Feedback by ImpraiseDocument30 pagesEbook The Managers Guide To Effective Feedback by ImpraiseDebarkaChakrabortyNo ratings yet
- C.C++ - Assignment - Problem ListDocument7 pagesC.C++ - Assignment - Problem ListKaushik ChauhanNo ratings yet
- SAP ORC Opportunities PDFDocument1 pageSAP ORC Opportunities PDFdevil_3565No ratings yet
- Tutorial 5 HExDocument16 pagesTutorial 5 HExishita.brahmbhattNo ratings yet
- CadLink Flyer 369044 937 Rev 00Document2 pagesCadLink Flyer 369044 937 Rev 00ShanaHNo ratings yet
- Applicants at Huye Campus SiteDocument4 pagesApplicants at Huye Campus SiteHIRWA Cyuzuzo CedricNo ratings yet
- Software EngineeringDocument3 pagesSoftware EngineeringImtiyaz BashaNo ratings yet
- Aptio ™ Text Setup Environment (TSE) User ManualDocument42 pagesAptio ™ Text Setup Environment (TSE) User Manualdhirender karkiNo ratings yet
- How To Make Money in The Stock MarketDocument40 pagesHow To Make Money in The Stock Markettcb66050% (2)
- Death Without A SuccessorDocument2 pagesDeath Without A Successorilmanman16No ratings yet
- APM Terminals Safety Policy SummaryDocument1 pageAPM Terminals Safety Policy SummaryVaviNo ratings yet
- 7th Kannada Science 01Document160 pages7th Kannada Science 01Edit O Pics StatusNo ratings yet
- Terms and Condition PDFDocument2 pagesTerms and Condition PDFSeanmarie CabralesNo ratings yet