You might also like
- Residencia Torres Cervantes MiguelDocument83 pagesResidencia Torres Cervantes MiguelmiketowersNo ratings yet
- Residencia Torres CervantesDocument12 pagesResidencia Torres CervantesmiketowersNo ratings yet
- Pantallas de PlasmaDocument16 pagesPantallas de PlasmamiketowersNo ratings yet
- Presentacion Art 31Document11 pagesPresentacion Art 31miketowersNo ratings yet
- Six SigmaDocument39 pagesSix SigmamiketowersNo ratings yet
- Investigacion 4 Unidad 1.0Document56 pagesInvestigacion 4 Unidad 1.0miketowersNo ratings yet
- Six SigmaDocument4 pagesSix SigmamiketowersNo ratings yet
- Expo Sic IonDocument7 pagesExpo Sic IonmiketowersNo ratings yet
- Introduccion PronosticosDocument13 pagesIntroduccion Pronosticosmiketowers40% (5)
- Demanda DependienteDocument9 pagesDemanda Dependientemiketowers0% (1)
- PringlesDocument19 pagesPringlesmiketowersNo ratings yet
- Objetivos DelDocument1 pageObjetivos DelmiketowersNo ratings yet
- Protocolo de Concreto 210 KGCM2Document1 pageProtocolo de Concreto 210 KGCM2Will VelNo ratings yet
- Exposicion TecnologiaDocument9 pagesExposicion TecnologiaGricelda Mariano FajardoNo ratings yet
- Actividad 2 Tecnologias de La InformacionDocument5 pagesActividad 2 Tecnologias de La Informacionvianey garzaNo ratings yet
- Energía eólica: historia, aplicaciones y tecnologíaDocument2 pagesEnergía eólica: historia, aplicaciones y tecnologíaDenis Martin Pech PechNo ratings yet
- Diagrama de ClasesDocument5 pagesDiagrama de ClasescarlosciezaNo ratings yet
- Empresas Bogota ClasificadasDocument1,216 pagesEmpresas Bogota ClasificadasMichael GreiffensteinNo ratings yet
- Monografia FinalDocument31 pagesMonografia FinalEdwin MéndezNo ratings yet
- Condiciones Externas de ProduccionDocument5 pagesCondiciones Externas de ProduccionJnArtNo ratings yet
- Análisis Eje Estratégico 4 Plan BicentenarioDocument13 pagesAnálisis Eje Estratégico 4 Plan BicentenarioalexanderNo ratings yet
- Silabo 2023-I SISTEMAS DE INFORMACIÓN GERENCIAL BDocument11 pagesSilabo 2023-I SISTEMAS DE INFORMACIÓN GERENCIAL BDora Velasquez GutierrezNo ratings yet
- Ed. Inicial en Familia ComunitariaDocument16 pagesEd. Inicial en Familia ComunitariaMaria esther Cuellar cuellarNo ratings yet
- Norma ANSI CDocument14 pagesNorma ANSI Cfaiber0510100% (1)
- SisInfoIIDocument5 pagesSisInfoIIluiz treviñoNo ratings yet
- Fundamentos de La Educación CristianaDocument15 pagesFundamentos de La Educación CristianaangelhbNo ratings yet
- SIMBOLOGIADocument18 pagesSIMBOLOGIAKarla VegasNo ratings yet
- Tarea 1 Proyecto IP (201220010221)Document12 pagesTarea 1 Proyecto IP (201220010221)Eleazar DavidNo ratings yet
- Proceso de ArranqueDocument2 pagesProceso de ArranqueubvaNo ratings yet
- Bicentenario PerúDocument7 pagesBicentenario PerúAlfonso Flores VillanuevaNo ratings yet
- 03 RESISTORES CompletoDocument35 pages03 RESISTORES CompletoJavier Díaz RojasNo ratings yet
- Documento Sin TítuloDocument2 pagesDocumento Sin TítuloingridNo ratings yet
- Kuka KR16Document5 pagesKuka KR16Fernando IguagoNo ratings yet
- La Sociedad de La InformaciónDocument42 pagesLa Sociedad de La InformaciónPaola Perez PozaNo ratings yet
- Reparar o Restaurar Íconos Desaparecidos en Windows 7Document5 pagesReparar o Restaurar Íconos Desaparecidos en Windows 7argus_panoptesNo ratings yet
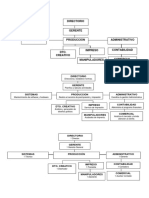
- Organigramas de Una ImprentaDocument1 pageOrganigramas de Una ImprentaAlejandra Briones100% (1)
- Análisis de los bloques del sistema SIMODocument8 pagesAnálisis de los bloques del sistema SIMOJhon Fredy AlvaradoNo ratings yet
- Trabajo de OrcadDocument29 pagesTrabajo de OrcadZosimo Palomino HuaccamaytaNo ratings yet
- Caso Grupal Tarea 2 PDFDocument2 pagesCaso Grupal Tarea 2 PDFAlexandra JaraNo ratings yet
- Formatos de Audio, Video e Imagen.Document3 pagesFormatos de Audio, Video e Imagen.FELIPE SEPULVEDADNo ratings yet
- Tecnología Educativa y los Fines de la EducaciónDocument3 pagesTecnología Educativa y los Fines de la EducaciónAgustin Guerra ferreiraNo ratings yet
- Los Grandes Problemas Afrontados y Movimientos Sociales y Medios de ComunicaciónDocument2 pagesLos Grandes Problemas Afrontados y Movimientos Sociales y Medios de ComunicaciónNikol PereiraNo ratings yet