You might also like
- Microcontroller and Sensors Based Gesture Vocalizer SystemDocument6 pagesMicrocontroller and Sensors Based Gesture Vocalizer SystemBV DarshanNo ratings yet
- Continuous Vibration Monitoring System Using Gaussian Beams and Artificial Neural NetworkDocument8 pagesContinuous Vibration Monitoring System Using Gaussian Beams and Artificial Neural NetworkAbigor45No ratings yet
- Stick Blind ManDocument4 pagesStick Blind ManجعفرالشموسيNo ratings yet
- Grasp Recognition From Myoelectric Signals: Simon Ferguson G Reg DunlopDocument5 pagesGrasp Recognition From Myoelectric Signals: Simon Ferguson G Reg Dunlopwmp8611024213No ratings yet
- assaIJETT V43P227Document5 pagesassaIJETT V43P227كن صديقيNo ratings yet
- Brain Controlled Car For DisabledDocument8 pagesBrain Controlled Car For Disabledsrkbatch08No ratings yet
- Robot Arm Control Method Using Forearm EMG SignalsDocument11 pagesRobot Arm Control Method Using Forearm EMG SignalsQuan Phương LêNo ratings yet
- Brain Controlled WheelchairDocument20 pagesBrain Controlled WheelchairsharvaniNo ratings yet
- Brain Controlled Artificial Legs: R.AnjaliDocument9 pagesBrain Controlled Artificial Legs: R.AnjalitheijesNo ratings yet
- Telehealth Monitoring Based Myoelectric Prosthetic ArmDocument27 pagesTelehealth Monitoring Based Myoelectric Prosthetic ArmAll Engineering ElectronicsNo ratings yet
- 05 - Smart Epilepsy Prediction SystemDocument9 pages05 - Smart Epilepsy Prediction SystemAkhil GanganNo ratings yet
- Jtehm Chiueh 2861882 PDFDocument10 pagesJtehm Chiueh 2861882 PDFnoviajengNo ratings yet
- 2101-6325-1-PBDocument11 pages2101-6325-1-PBAndrés RamírezNo ratings yet
- Brain Controlled Car For Disabled Using Artificial IntelligenceDocument8 pagesBrain Controlled Car For Disabled Using Artificial IntelligenceSrini VasuluNo ratings yet
- ECG Signal ProcessingDocument6 pagesECG Signal ProcessingIshmael AcevedoNo ratings yet
- Brain controlled car using EEG for disabledDocument6 pagesBrain controlled car using EEG for disabledDinesh DinuNo ratings yet
- Journal Pre-Proof: Microprocessors and MicrosystemsDocument29 pagesJournal Pre-Proof: Microprocessors and MicrosystemsarjetaNo ratings yet
- Tentative Paper1Document5 pagesTentative Paper119CS100 Dinesh ReddyNo ratings yet
- Brain Controlled Car For DisabledDocument7 pagesBrain Controlled Car For DisabledArjun AnduriNo ratings yet
- A Technical Seminar On: Wearable BiosensorsDocument28 pagesA Technical Seminar On: Wearable BiosensorsMushfique HussainNo ratings yet
- Analysis of Myoelectric Signals To Prosthesis ApplicationsDocument8 pagesAnalysis of Myoelectric Signals To Prosthesis ApplicationsBrunaNo ratings yet
- Brain Controlled Car For Disabled Using Artificial Intelligence IJERTCONV1IS03024Document3 pagesBrain Controlled Car For Disabled Using Artificial Intelligence IJERTCONV1IS03024physics a2100% (1)
- Robot Hand Movement Electromyography SignalDocument23 pagesRobot Hand Movement Electromyography SignalWilliam VenegasNo ratings yet
- Robot Control Through Brain-Computer Interface For Pattern GenerationDocument9 pagesRobot Control Through Brain-Computer Interface For Pattern GenerationfelixabreuaNo ratings yet
- Control Artificial Legs Brain SignalsDocument13 pagesControl Artificial Legs Brain SignalsAshok KumarNo ratings yet
- Prototype Design and Implementation of An Automatic Control System Based On A BCIDocument13 pagesPrototype Design and Implementation of An Automatic Control System Based On A BCIBukong LiNo ratings yet
- Mechanical Vibration AnalysisDocument18 pagesMechanical Vibration AnalysisMahaManthraNo ratings yet
- Bluetooth heart rate monitoring for patientsDocument54 pagesBluetooth heart rate monitoring for patientsdulipala alekya gupthaNo ratings yet
- Sensor Based Wearable System To Assist Paralytic Patient With Continuous Health MonitoringDocument6 pagesSensor Based Wearable System To Assist Paralytic Patient With Continuous Health MonitoringAnonymous Tg2ypWjlNMNo ratings yet
- Touch Screen and Accelerometer Based Wireless Motor Speed and Direction Controlling System Using ArduinoDocument4 pagesTouch Screen and Accelerometer Based Wireless Motor Speed and Direction Controlling System Using ArduinoseventhsensegroupNo ratings yet
- Virtual Eye for Blind PeopleDocument7 pagesVirtual Eye for Blind PeopleraviNo ratings yet
- The Surface Electromyography Noise Filtering and Unwanted Recordings Attenuation For Lower Limb Robotic SystemDocument8 pagesThe Surface Electromyography Noise Filtering and Unwanted Recordings Attenuation For Lower Limb Robotic SystemIAES International Journal of Robotics and AutomationNo ratings yet
- Neural device translates images into tactile sensations for the blindDocument30 pagesNeural device translates images into tactile sensations for the blindPriya Mandal0% (1)
- Sensors Management in Robotic Neurosurgery: The ROBOCAST ProjectDocument4 pagesSensors Management in Robotic Neurosurgery: The ROBOCAST Projectsekar_102No ratings yet
- LabVIEW Based EIT System TKBera IIScDocument6 pagesLabVIEW Based EIT System TKBera IISclatecNo ratings yet
- Control Strategies For Hand ProsthesesDocument7 pagesControl Strategies For Hand ProsthesesamirtempsNo ratings yet
- Wireless Sensor Module For 3-Axis Vibration and Tilt Monitoring On The Structural BuildingDocument8 pagesWireless Sensor Module For 3-Axis Vibration and Tilt Monitoring On The Structural BuildingDimas SuryaNo ratings yet
- On Brain Computer Interface: 2. Proposed System 3. Working 4. Advantages 5. Disadvantages 6. ApplicationsDocument14 pagesOn Brain Computer Interface: 2. Proposed System 3. Working 4. Advantages 5. Disadvantages 6. Applicationsannrose_mecNo ratings yet
- Brain Computer Interface For Multiple Applications ControlDocument5 pagesBrain Computer Interface For Multiple Applications ControlKrishna ReddyNo ratings yet
- Applications of GSM Module in Wireless ECGDocument7 pagesApplications of GSM Module in Wireless ECGAbd TashNo ratings yet
- EMG - Based HmiDocument28 pagesEMG - Based HmiShubham SharmaNo ratings yet
- K1C015044 - Tugas 2 SeminarDocument6 pagesK1C015044 - Tugas 2 SeminarSafitriNo ratings yet
- 1.1 Problem: Chapter-1 Project BackgroundDocument38 pages1.1 Problem: Chapter-1 Project Backgroundamit_k_gupta91No ratings yet
- Final Year Embedded ProjectsDocument148 pagesFinal Year Embedded ProjectsPravin DabhiNo ratings yet
- 2013 SENSORCOMM Early-Warning System For Machine FailureDocument7 pages2013 SENSORCOMM Early-Warning System For Machine FailureLuqman AzamNo ratings yet
- Development of An Embedded System For Distance Measuring Using Ultrasonic SensorDocument4 pagesDevelopment of An Embedded System For Distance Measuring Using Ultrasonic SensornikhithaNo ratings yet
- Morais 2021 J. Phys. Conf. Ser. 1826 012084Document8 pagesMorais 2021 J. Phys. Conf. Ser. 1826 012084Johnny Joe AguilarNo ratings yet
- Development of Real-Time Drowsiness Detection With Ecg andDocument7 pagesDevelopment of Real-Time Drowsiness Detection With Ecg andMaddyNo ratings yet
- Ekg Mobile: Advanced Science and Technology Letters Vol.49 (Softtech 2014), Pp.95-100Document6 pagesEkg Mobile: Advanced Science and Technology Letters Vol.49 (Softtech 2014), Pp.95-100RockyNo ratings yet
- Psoc-Based Embedded System For The Acquisition of Emg Signals With Android Mobile Device DisplayDocument6 pagesPsoc-Based Embedded System For The Acquisition of Emg Signals With Android Mobile Device DisplayAlex BogmaNo ratings yet
- Earthquake Detection in A Static and Dynamic Environment Using Supervised Machine LearningDocument21 pagesEarthquake Detection in A Static and Dynamic Environment Using Supervised Machine LearningLuthfi PratamaNo ratings yet
- Smartphone Based Wearable Sensors For Cyborgs Using Neural Network EngineDocument7 pagesSmartphone Based Wearable Sensors For Cyborgs Using Neural Network EnginetheijesNo ratings yet
- BCI Seminar GuideDocument11 pagesBCI Seminar GuideVisarg ShahNo ratings yet
- Calibration Algorithm and Electrode Array For EMG of ProstheticDocument19 pagesCalibration Algorithm and Electrode Array For EMG of ProstheticExperian ElitiawanNo ratings yet
- A Low-Cost, Open-Source, Compliant Hand For Enabling Sensorimotor Control For People With Transradial AmputationsDocument4 pagesA Low-Cost, Open-Source, Compliant Hand For Enabling Sensorimotor Control For People With Transradial Amputationsmanju.vs1546No ratings yet
- Paper 28-EEG Mouse A Machine Learning-Based Brain Computer InterfaceDocument6 pagesPaper 28-EEG Mouse A Machine Learning-Based Brain Computer InterfaceSagar KarpeNo ratings yet
- Design and Development of Microcontroller Based Ultrasonic Flaw DetectorDocument7 pagesDesign and Development of Microcontroller Based Ultrasonic Flaw DetectorBagusElokNo ratings yet
- Textbook of Urgent Care Management: Chapter 35, Urgent Care Imaging and InterpretationFrom EverandTextbook of Urgent Care Management: Chapter 35, Urgent Care Imaging and InterpretationNo ratings yet
- Tactile Sensing and Displays: Haptic Feedback for Minimally Invasive Surgery and RoboticsFrom EverandTactile Sensing and Displays: Haptic Feedback for Minimally Invasive Surgery and RoboticsNo ratings yet
- Cellphone Operated RobotDocument7 pagesCellphone Operated RobotShashank AppiNo ratings yet
- g10 Satellite EncryptionDocument4 pagesg10 Satellite EncryptionShashank AppiNo ratings yet
- Bio Metrics: Muthayammal Engineering CollegeDocument12 pagesBio Metrics: Muthayammal Engineering CollegeShashank AppiNo ratings yet
- ModemDocument10 pagesModemShashank AppiNo ratings yet
- 193 Um015 - en P PDFDocument736 pages193 Um015 - en P PDFAdelson PimentelNo ratings yet
- Quiz Questions on Internet ConceptsDocument3 pagesQuiz Questions on Internet Conceptsjohn100% (1)
- Ella Mae C. Acla Resume 2023 PDFDocument2 pagesElla Mae C. Acla Resume 2023 PDFMark Wilber Diano GuzonNo ratings yet
- Arango DBDocument12 pagesArango DBrchawla8No ratings yet
- Hyperloop ReportDocument25 pagesHyperloop ReportAVI RAJNo ratings yet
- Erdt EssayDocument2 pagesErdt EssayJuan Carlos Dela CruzNo ratings yet
- DR-ID330CL - Operation Manual - 897N202069 - Z72N100628 - RefDocument84 pagesDR-ID330CL - Operation Manual - 897N202069 - Z72N100628 - RefFernando ValleNo ratings yet
- Locating and clamping principles for machiningDocument39 pagesLocating and clamping principles for machiningRamiro Acosta CepedaNo ratings yet
- ICT TERMS-WPS OfficeDocument3 pagesICT TERMS-WPS OfficeKate Hera RiegoNo ratings yet
- Artificial Intelligence in 5GDocument34 pagesArtificial Intelligence in 5GSakhawat Ali SahgalNo ratings yet
- Investigate Power Characteristics and Analyze The Causes of ProblemsDocument24 pagesInvestigate Power Characteristics and Analyze The Causes of ProblemsSourabh ChoudharyNo ratings yet
- HP Laserjet Pro MFP M127 Series: Handle The Essentials With One Affordable, Networked MFPDocument2 pagesHP Laserjet Pro MFP M127 Series: Handle The Essentials With One Affordable, Networked MFPAndrew MarshallNo ratings yet
- AVCCDocument3 pagesAVCCTanya WilkersonNo ratings yet
- L1+L2+L3-Project Integration Management2Document45 pagesL1+L2+L3-Project Integration Management2MASOUDNo ratings yet
- Manufacturing Process LabDocument9 pagesManufacturing Process LabJing HengNo ratings yet
- Students' Attitudes Towards Science and Expectations of Science Related CareersDocument37 pagesStudents' Attitudes Towards Science and Expectations of Science Related CareersFitriyani SaparangNo ratings yet
- Getting Started Guide - WORLDDocument7 pagesGetting Started Guide - WORLDburrubNo ratings yet
- PMDG 737 Checklist 2.0 LightDocument6 pagesPMDG 737 Checklist 2.0 LightHenry O'sunaNo ratings yet
- Roads in MozambiqueDocument17 pagesRoads in MozambiqueGladys Joyce FaustinoNo ratings yet
- Assignment 3Document5 pagesAssignment 3kevin0% (2)
- Group 20 M191en 05 2015 PDFDocument46 pagesGroup 20 M191en 05 2015 PDFDavid Solis0% (1)
- Unit 2 ECommerce ApplicationsDocument63 pagesUnit 2 ECommerce ApplicationsSuresh Babu C VNo ratings yet
- 360bind For SAP BusinessObjects Automated Regression TestingDocument16 pages360bind For SAP BusinessObjects Automated Regression Testinggoiffon sebastienNo ratings yet
- Engine Controls/Fuel - I.8L (LUW, LWE) 9-591Document1 pageEngine Controls/Fuel - I.8L (LUW, LWE) 9-591flash_24014910No ratings yet
- KS En465 - Ex2000 7 PDFDocument11 pagesKS En465 - Ex2000 7 PDFzhao haohaoNo ratings yet
- Introduction To Computing Applied Business Tools and TechnologiesDocument9 pagesIntroduction To Computing Applied Business Tools and TechnologiesClaire CarpioNo ratings yet
- Guidelines PHD Admission 20153Document8 pagesGuidelines PHD Admission 20153manish_chaturvedi_6No ratings yet
- Nasscom Member List-2017Document25 pagesNasscom Member List-2017Rohit AggarwalNo ratings yet
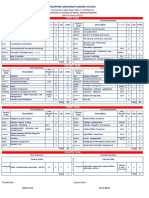
- Philippine Merchant Marine School: First YearDocument5 pagesPhilippine Merchant Marine School: First YearCris Mhar Alejandro100% (1)
- Buffering in Operating System - JavatpointDocument7 pagesBuffering in Operating System - JavatpointkkkkNo ratings yet