You might also like
- Kinematic Viscosity of Asphalts (Bitumens) : Standard Method of Test ForDocument11 pagesKinematic Viscosity of Asphalts (Bitumens) : Standard Method of Test ForJuan Daniel Rojas PalmaNo ratings yet
- M 295 DesDocument5 pagesM 295 DesJuan Daniel Rojas Palma100% (1)
- 60-70 CertificationDocument1 page60-70 CertificationJuan Daniel Rojas PalmaNo ratings yet
- UP-72 TDS SpanishDocument1 pageUP-72 TDS SpanishJuan Daniel Rojas PalmaNo ratings yet
- M 182 DesDocument3 pagesM 182 DesJuan Daniel Rojas PalmaNo ratings yet
- M 233 DesDocument2 pagesM 233 DesJuan Daniel Rojas PalmaNo ratings yet
- Pavement Structural Evaluation Using The Rolling Wheel DeflectomeDocument113 pagesPavement Structural Evaluation Using The Rolling Wheel DeflectomeJuan Daniel Rojas PalmaNo ratings yet
- Part II IndexDocument20 pagesPart II IndexJuan Daniel Rojas PalmaNo ratings yet
- 1 - 270 - RR301 - MERLIN Low-Cost Road Roughness Measuring DeviceDocument25 pages1 - 270 - RR301 - MERLIN Low-Cost Road Roughness Measuring DeviceJuan Daniel Rojas Palma100% (1)
- M 194 DesDocument10 pagesM 194 DesJuan Daniel Rojas PalmaNo ratings yet
- M 241 DesDocument9 pagesM 241 DesJuan Daniel Rojas PalmaNo ratings yet
- Aci 229R-99Document27 pagesAci 229R-99Juan Daniel Rojas Palma100% (1)
- M 302 DesDocument9 pagesM 302 DesJuan Daniel Rojas PalmaNo ratings yet
- M 154 DesDocument4 pagesM 154 DesJuan Daniel Rojas PalmaNo ratings yet
- M 148 DesDocument4 pagesM 148 DesJuan Daniel Rojas PalmaNo ratings yet
- HM 30TableOfContents AASHTODocument59 pagesHM 30TableOfContents AASHTOJuan Daniel Rojas PalmaNo ratings yet
- Calibracion MepdgDocument127 pagesCalibracion MepdgJuan Daniel Rojas PalmaNo ratings yet
- M 006Document6 pagesM 006Juan Daniel Rojas PalmaNo ratings yet
- CBR Test Method for Soil StrengthDocument11 pagesCBR Test Method for Soil StrengthMuhammad Iqbal100% (4)
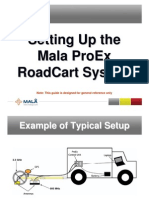
- 2 Basic Guide - Setting Up The RoadCart System (MALA)Document13 pages2 Basic Guide - Setting Up The RoadCart System (MALA)Juan Daniel Rojas PalmaNo ratings yet
- T22Document13 pagesT22Juan Daniel Rojas PalmaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A380-LEVEL III - ATA 42 Integrated Modular Avionics - Avionics DaDocument66 pagesA380-LEVEL III - ATA 42 Integrated Modular Avionics - Avionics DaAbolfazl Mazloomi100% (11)
- 625-NR Consolidated NovemberDocument321 pages625-NR Consolidated NovemberArturoNo ratings yet
- The Properties of WaterDocument6 pagesThe Properties of WaterannisyaNo ratings yet
- Textbook of Applied ElectronicsDocument8 pagesTextbook of Applied Electronicsshehnasheh99No ratings yet
- Acee 2018 039Document13 pagesAcee 2018 039threedlabsNo ratings yet
- EASA Part 66 Module 7 MCQ and Essay QuestionsDocument4 pagesEASA Part 66 Module 7 MCQ and Essay QuestionsazadairNo ratings yet
- CNA09016 SGDocument8 pagesCNA09016 SGSatyarth SampathNo ratings yet
- FADesignManual v2 14 SP PDFDocument88 pagesFADesignManual v2 14 SP PDFpandu lambangNo ratings yet
- JETL industrial wastewater treatment reportDocument6 pagesJETL industrial wastewater treatment reportPremKumarNo ratings yet
- SHINI Hopper-Loader - SAL-400 SERIES MANUALDocument38 pagesSHINI Hopper-Loader - SAL-400 SERIES MANUALRick ChenNo ratings yet
- Capacitor Banks - Schedules FILLEDDocument11 pagesCapacitor Banks - Schedules FILLEDyahyaNo ratings yet
- Corrosion in Oil and Gas Industry A Perspective On Corrosion InhibitorsDocument1 pageCorrosion in Oil and Gas Industry A Perspective On Corrosion InhibitorsAsma Sed100% (1)
- Hoarding Guide 2020Document46 pagesHoarding Guide 2020Mohammed HafizNo ratings yet
- Zetron Model 30 Instruction Manual EarlyDocument58 pagesZetron Model 30 Instruction Manual EarlyOscar EscobarNo ratings yet
- Biological ExerciseDocument6 pagesBiological ExerciseTanmoy BasakNo ratings yet
- Elink For Windows: List of Pages in This Trip KitDocument130 pagesElink For Windows: List of Pages in This Trip KitAhmed GvNo ratings yet
- SYNOPSIS For Job PortalDocument6 pagesSYNOPSIS For Job PortalAkanksha Verma90% (10)
- Part # Is 0032192-70: Eldorado Eldorado Eldorado Eldorado National National National NationalDocument1 pagePart # Is 0032192-70: Eldorado Eldorado Eldorado Eldorado National National National NationalmnvijaybabuNo ratings yet
- Baja Parts Catalog PX250S Motorcycle VIN Prefix LUAHDocument20 pagesBaja Parts Catalog PX250S Motorcycle VIN Prefix LUAHholycostNo ratings yet
- Signals and Systems - MjrobertsDocument3 pagesSignals and Systems - Mjrobertspriyakanthr5883100% (1)
- Cs15 Gas Tank Cleaning Degassing 1997Document12 pagesCs15 Gas Tank Cleaning Degassing 1997kirandevi1981100% (2)
- Add Info B-82974EN 01Document3 pagesAdd Info B-82974EN 01Charles JacobNo ratings yet
- Properties of LPGDocument33 pagesProperties of LPGmukund madhav100% (2)
- 1170 Imagerunner Advance DX 4700 Series PC r0 200228Document180 pages1170 Imagerunner Advance DX 4700 Series PC r0 200228Marco Antonio Valverde MarinNo ratings yet
- 61 35 122 Removing and Installing - Replacing General ModuleDocument2 pages61 35 122 Removing and Installing - Replacing General ModuleTung NguyenNo ratings yet
- Figure 6-1. Frame Accessories Battery Figure 6-1. Frame Accessories BatteryDocument31 pagesFigure 6-1. Frame Accessories Battery Figure 6-1. Frame Accessories BatteryalopezvillavicencioNo ratings yet
- Extent, Yield, and SelectivityDocument10 pagesExtent, Yield, and SelectivityKristopher Ray Simbulan PamintuanNo ratings yet
- Catalogo - CATUDocument132 pagesCatalogo - CATUxis-zeroNo ratings yet
- Appendix 400.4 - Traffic Count TemplateDocument7 pagesAppendix 400.4 - Traffic Count TemplateOgunranti RasaqNo ratings yet
- Vismat Material V-Ray For SketchupDocument19 pagesVismat Material V-Ray For SketchupAmer GonzalesNo ratings yet