You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Design Note: Optimizing Performance in Uc3854 Power Factor Correction ApplicationsDocument42 pagesDesign Note: Optimizing Performance in Uc3854 Power Factor Correction ApplicationsidsufixNo ratings yet
- Article 50 Ijaet Volii Issue IV Oct Dec 2011Document6 pagesArticle 50 Ijaet Volii Issue IV Oct Dec 2011Pradyumna PooskuruNo ratings yet
- HERICDocument7 pagesHERICMinh NhậtNo ratings yet
- V An Innovative Magnetic Field Sweep Unit: of of of ofDocument20 pagesV An Innovative Magnetic Field Sweep Unit: of of of ofBerthaFloresNo ratings yet
- DC Motor Fyp EdittdDocument20 pagesDC Motor Fyp EdittdRabia BilalNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Earth Fault RelayDocument12 pagesEarth Fault Relaysabill arasyidNo ratings yet
- Electrical Motor Circuit SizingDocument7 pagesElectrical Motor Circuit SizingLinus AbokiNo ratings yet
- Linear Amps For Mobile OperationDocument10 pagesLinear Amps For Mobile OperationIan McNairNo ratings yet
- Induction Motor ProtectionDocument42 pagesInduction Motor Protectionjayonline_4u91% (11)
- Solid State Circuit Breaker PDFDocument7 pagesSolid State Circuit Breaker PDFifmatosNo ratings yet
- Fault Isolation in Distributed Generation ConnectedDocument24 pagesFault Isolation in Distributed Generation ConnectedQais AlsafasfehNo ratings yet
- v42 63Document5 pagesv42 63Bala KumarNo ratings yet
- 3-Phase PFC KolarDocument7 pages3-Phase PFC KolarJayant SalianNo ratings yet
- Arcing Fault Current and The Criteria For Setting Ground Fault Relays in Solidly-Grounded Low Voltage SystemsDocument7 pagesArcing Fault Current and The Criteria For Setting Ground Fault Relays in Solidly-Grounded Low Voltage SystemsSantanu RoutNo ratings yet
- Trans Ind Electr 2007 - 2Document8 pagesTrans Ind Electr 2007 - 2Indra PratamaNo ratings yet
- EE 410 Lab1 Fall10-1305411901Document27 pagesEE 410 Lab1 Fall10-1305411901Mohamad SyazwanNo ratings yet
- 13.56 MHZ, Class D Push-Pull, 2KW RF GeneratorDocument17 pages13.56 MHZ, Class D Push-Pull, 2KW RF GeneratorettorepellegriniNo ratings yet
- Switching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Document17 pagesSwitching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Burlacu AndreiNo ratings yet
- 60W Flyback TIDocument16 pages60W Flyback TIe_magazin3821No ratings yet
- Single Phasing EffectsDocument41 pagesSingle Phasing EffectsdiljithNo ratings yet
- Low EMI For Power IsolationDocument14 pagesLow EMI For Power IsolationSuvadip BanerjeeNo ratings yet
- DC motor speed control using magnetic amplifierDocument8 pagesDC motor speed control using magnetic amplifierNexus GoddNo ratings yet
- 948-955 IJER - 2016 - 1201 Mona CDocument7 pages948-955 IJER - 2016 - 1201 Mona CInnovative Research PublicationsNo ratings yet
- Uc3842 Provides Low-Cost Current-Mode Control: Application NoteDocument16 pagesUc3842 Provides Low-Cost Current-Mode Control: Application NoteLeonardo Ortiz100% (1)
- Digital Current Limiting Techniques For Switching Power Supplies PDFDocument9 pagesDigital Current Limiting Techniques For Switching Power Supplies PDFAdolfo A HerreraNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- AC Generator and Motor ProtectionDocument76 pagesAC Generator and Motor ProtectionAtif Husayn100% (1)
- PWM Motor Speed Controller and DC Light Dimmer Circuit GuideDocument16 pagesPWM Motor Speed Controller and DC Light Dimmer Circuit GuideRICHIHOTS2100% (2)
- Types Pyts & Pytc Switched Distance RelaysDocument14 pagesTypes Pyts & Pytc Switched Distance Relayssgshekar30100% (1)
- 35kW Active RectifierDocument6 pages35kW Active RectifierndcongNo ratings yet
- ABB ABB ABB ABB: Type KD-10 and KD-11 Compensator Distance RelayDocument60 pagesABB ABB ABB ABB: Type KD-10 and KD-11 Compensator Distance RelaybcfochtNo ratings yet
- A Novel Passive Filter To Reduce PWM Inverters Adverse Effects in Electrical Machine SystemDocument9 pagesA Novel Passive Filter To Reduce PWM Inverters Adverse Effects in Electrical Machine SystemshaheerdurraniNo ratings yet
- Aplicacion Uc3842Document15 pagesAplicacion Uc3842Gian Mejia100% (1)
- AppNote03 Uc3842Document14 pagesAppNote03 Uc3842Heriberto Flores AmpieNo ratings yet
- Slua 143Document15 pagesSlua 143Tonia KataNo ratings yet
- Abstract of 3phase RectifierDocument3 pagesAbstract of 3phase RectifierKishanKumarYadavNo ratings yet
- UC3845 Technical ExplanationDocument15 pagesUC3845 Technical ExplanationankurmalviyaNo ratings yet
- Power Electronics Lab Manual With Orcad Pspice 10.5Document36 pagesPower Electronics Lab Manual With Orcad Pspice 10.5Muhammad Ahtisham Asif100% (2)
- Local Media5941271462837301265Document65 pagesLocal Media5941271462837301265jason mr.perfect11No ratings yet
- Partial Discharge Diagnosis On Large Power TransformersDocument6 pagesPartial Discharge Diagnosis On Large Power TransformersDiego VidarteNo ratings yet
- Speed Checkers For HighwaysDocument35 pagesSpeed Checkers For HighwaysKarthik Mvs100% (1)
- ME5507 - Electrical Services Volt Drop and OverloadDocument4 pagesME5507 - Electrical Services Volt Drop and OverloadpravishnNo ratings yet
- An 4160Document8 pagesAn 4160aurumstar2000No ratings yet
- Wcecs2009 - pp545-549 Computer LoadsDocument5 pagesWcecs2009 - pp545-549 Computer LoadsYogesh MsdNo ratings yet
- 2012Ch1 Supple NotesDocument12 pages2012Ch1 Supple Notesskywalker_handsomeNo ratings yet
- 20 The Essence of ThreePhase INTELEC2011Document28 pages20 The Essence of ThreePhase INTELEC2011noreuNo ratings yet
- Power Failure AlarmDocument17 pagesPower Failure AlarmPurva Patil33% (3)
- UC3842 Inside SchematicsDocument17 pagesUC3842 Inside Schematicsp.c100% (1)
- Why Is Continuous On-Line Monitoring of Partial Discharge in The Switchgear Necessary?Document17 pagesWhy Is Continuous On-Line Monitoring of Partial Discharge in The Switchgear Necessary?sunny1725No ratings yet
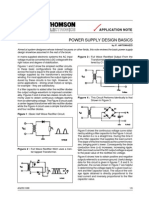
- Power Supply Design Basics: Figure 3: Full Wave Rectified Output From TheDocument6 pagesPower Supply Design Basics: Figure 3: Full Wave Rectified Output From Theprotesto06No ratings yet
- 1707 An253 Power Supply Design Basics ImpDocument6 pages1707 An253 Power Supply Design Basics ImpbmmostefaNo ratings yet
- The ANSI/IEEE Code For Phase Sequence Relay Is 47 and of Phase Failure Relay Is 58Document9 pagesThe ANSI/IEEE Code For Phase Sequence Relay Is 47 and of Phase Failure Relay Is 58ax33m144No ratings yet
- DiDocument6 pagesDipani256No ratings yet
- ANPC-5L Technology Applied To Medium Voltage Variable Speed Drives ApplicationsDocument8 pagesANPC-5L Technology Applied To Medium Voltage Variable Speed Drives ApplicationsRen Hong GiangNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Siddharth Singh ResumeDocument4 pagesSiddharth Singh ResumeAbhishek ParmarNo ratings yet
- OLED Lighting Technology OverviewDocument3 pagesOLED Lighting Technology OverviewAbhishek ParmarNo ratings yet
- Digital AbhishekDocument6 pagesDigital AbhishekAbhishek ParmarNo ratings yet
- Light Emitting PolymersDocument17 pagesLight Emitting PolymersAbhishek Parmar100% (1)
- Artificial IntelligenceDocument35 pagesArtificial IntelligenceRolando Merino VélezNo ratings yet
- Ee Gate 2010Document16 pagesEe Gate 2010Sekhar ChallaNo ratings yet